


تحلیل مدولار سیستمهای AGV چندگانه
سیستمهای AGV چندگانه شامل مجموعهای از AGVها هستند که بهطور هماهنگ وظایف مختلف را در یک محیط پیچیده انجام میدهند. این سیستم شامل فرآیندهای برنامهریزی، مسیریابی، و زمانبندی است که به هماهنگی و بهرهوری بیشتر کمک میکنند. سیستم مدیریت انبار (WMS) مسئول ارسال سفارشها به سیستم مدیریت AGV است که هدایت دقیق هر وسیله نقلیه را بر عهده دارد.
ماژول برنامهریزی وظیفه تخصیص سفارشها به AGVها را بر اساس استراتژیهای مشخص انجام میدهد، در حالی که ماژول مسیریابی مسیرهای بهینه را تعیین میکند و ماژول زمانبندی زمان انجام وظایف را برنامهریزی میکند. دادههای بهدستآمده از هر AGV بهصورت آنی به سیستم ارسال شده و در صورت بروز مشکل، وظیفه بهطور خودکار مجدداً تخصیص مییابد.
این بخش به بررسی دو قسمت باقی مانده یعنی مسیریابی و زمانبندی خواهیم پرداخت.
مسیریابی
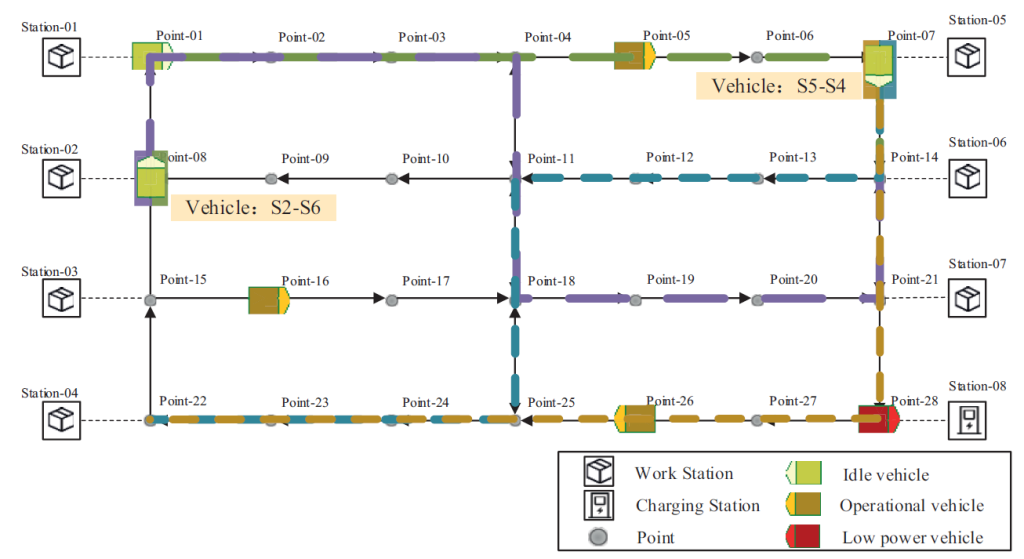
مسیریابی، عملکردی است که یک مسیر خاص را برای AGV (وسیله نقلیه هدایتشونده خودکار) تعیین میکند تا به مقصد خود برسد. این عملکرد، مسئله انتخاب مسیر مناسب برای دو AGV از نقطه شروع تا نقطه پایان را مدیریت میکند. همانطور که در شکل زیر نشان داده شده است، دو AGV در ایستگاههای S7 و S8 قرار دارند و ماژول مسیر دو مسیر اختیاری برای هر وسیله نقلیه اختصاص داده است که با دو رنگ مختلف نشان داده شده است.
مسئله مسیر، بهعنوان یک نسخه پیچیدهتر از مسأله سنتی مسیریابی وسیله نقلیه مطرح شده است. پیچیدگی این مسئله در این است که باید مشکل برخورد غیرقابل پیشبینی در سناریوهای کاری واقعی نیز در نظر گرفته شود. بهطور کلی، مسیر بهدستآمده از استراتژی کمترین مسافت و استراتژی کمترین زمان در سیستمهای مدیریت چند AGV یکسان نیست و گاهی لازم است مسیر تغییر کند تا مشکلات تداخل و بنبستها حل شوند.
همانطور که در شکل نشان داده شده است، مشاهده میشود که هر AGV بیکار (واقع در نقطههای 07 و 08) دو مسیر جایگزین دارد که هر رنگ نمایانگر یک مسیر است. برای هر AGV، مسیر بهینه ممکن است کوتاهترین مسیر نباشد. این به این دلیل است که در حین حرکت، AGV بهراحتی تحت تأثیر سایر AGVهایی که در همان مسیر حرکت میکنند قرار میگیرد. در سیستم مدیریت چند AGV، ماژول مسیر نهتنها مسیری را که شرایط خاصی را برای یک وسیله نقلیه برآورده میکند، انتخاب میکند، بلکه باید انتخاب مسیر سایر وسایل نقلیه را نیز در نظر بگیرد تا از مشکلات ترافیک یا برخورد جلوگیری کند.
بسیاری از پژوهشگران راهحلهای پیچیدهتر و هوشمندانهتری برای ماژول مسیر پیشنهاد دادهاند که عمدتاً به دو دسته الگوریتمهای مسیریابی ایستا و الگوریتمهای مسیریابی پویا تقسیم میشوند. روش مسیریابی ایستا به وضعیتی اطلاق میشود که مسیر وسیله نقلیه در طول عملیات تغییر نمیکند. در حالت مسیریابی پویا، سیستم مدیریت میتواند مسیر را با توجه به اطلاعات زمان واقعی در حین اجرای فرآیند دوباره برنامهریزی یا انتخاب کند.
1. الگوریتمهای مسیریابی ایستا
کمترین مسافت سفر، اصلیترین راهحل برای برنامهریزی مسیریابی ایستا است. الگوریتمها شامل الگوریتم دیکسترا، الگوریتم *A، الگوریتم ژنتیک و غیره هستند. یک روش انتخاب مسیر بهینه برای کمترین مسافت سفر با بهبود الگوریتم ژنتیک پیشنهاد شده است. برای مسائل مقیاس کوچک، نتایج بهتری نسبت به الگوریتم ژنتیک سنتی بهدست میآید. همچنین یک روش ایستا برای حل مسئله مسیر بدون برخورد AGVها پیشنهاد شده است. این روش شامل یک روش مسیریابی دو مرحلهای است. در مرحله اول، شبکه جاده مدلسازی میشود و در مرحله دوم، بنبستها شناسایی میشوند. یک مسیر بدون برخورد برای AGVها از طریق پیشبرنامهریزی پیشنهاد شد که شامل سه مرحله است: بررسی قابلیت فضایی، بررسی قابلیت زمانی و بررسی تعارضات احتمالی. با این روش، پیشبینی دقیق اجرای ممکن نیست و ممکن است سیستم متوقف یا حتی دچار خرابی شود.
2.الگوریتمهای مسیریابی پویا
در مقایسه با الگوریتمهای مسیریابی ایستا، الگوریتمهای مسیریابی پویا انعطافپذیری بیشتری در برابر شرایط غیرمنتظره دارند. یک الگوریتم برنامهریزی مسیریابی تطبیقی به شرح زیر پیشنهاد شده است: ابتدا، الگوریتم دیکسترا برای مسیریابی اولیه AGVها استفاده میشود تا مسیرهای کاندیدا بهدست آید، سپس گرههایی که ممکن است باعث ایجاد تعارض در مسیرهای کاندیدا شوند شناسایی شده و از یک روش تطبیقی برای حل مشکل تعارض ناشی از این گرهها استفاده میشود. نقطه ضعف این روش این است که ممکن است پیچیدگی مسئله به دلیل استراتژی تغییر مسیر افزایش یابد. همچنین، هزینه برآوردی الگوریتم *A با افزایش مقدار جریمه برای مسیری که AGVها با یکدیگر به اشتراک میگذارند، بهمنظور کاهش ترافیک و برخورد، بهبود یافته است. استفاده از این روش تغییر مسیر باعث بهدست آمدن یک تغییر مسیر با پیچیدگی کمتر و اثرات بهتر در تغییر مسیر میشود. علاوه بر این، از کمترین مسافت برای پیشنهاد یک الگوریتم برنامهریزی مسیریابی با استفاده از پنجرههای زمانی بهصورت برداری استفاده شده است. اگرچه مشکلاتی مانند پیچیدگی تغییر مسیر و عملکرد زمان واقعی وجود دارد، روش مسیریابی پویا در بیشتر موارد سیستمهای مدیریت چند AGV مناسبتر است.
برنامهریزی (Schedule)
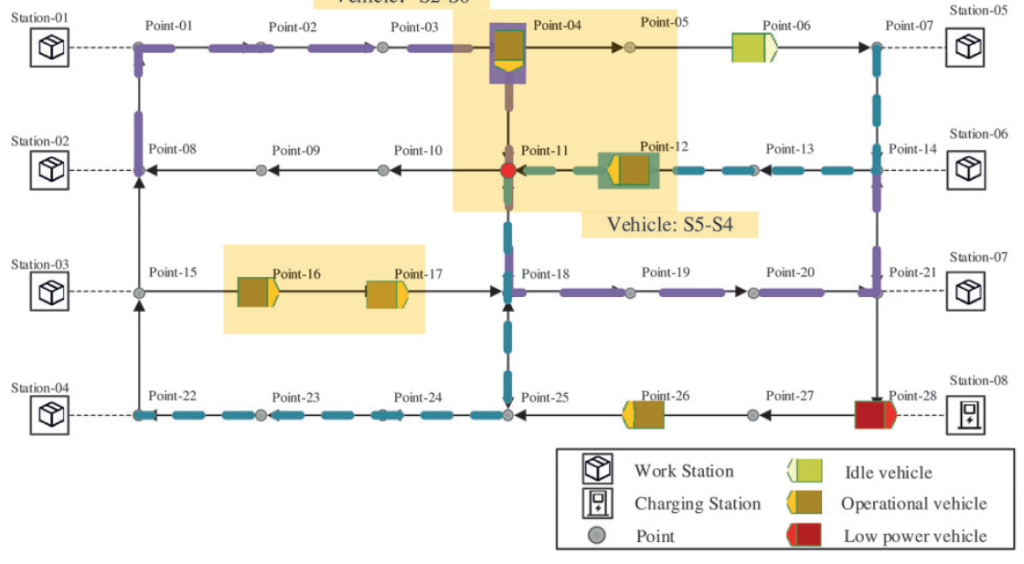
برنامهریزی مسئلهای است که بعد زمانی را به ارسال و مسیر اضافه میکند تا تصمیم بگیرد که کی ارسال انجام شود و چگونه تعارضات در مسیر حل شوند. همانطور که در شکل زیر نشان داده شده است، بخش برجسته نمایانگر سناریوی کاربردی عملکرد برنامهریزی است که مسئول تصمیمگیری در مورد تخصیص منابع به AGVها است. دو AGV برای نقطه 11 و دو AGV دیگر برای نقطه 17 رقابت میکنند. عملکرد برنامهریزی مشکل تخصیص نقطه تقاطع (منبع) به کدام AGV را حل میکند.
مسئله برنامهریزی به دو دسته تقسیم شده است: برنامهریزی آفلاین و برنامهریزی آنلاین. در روش برنامهریزی آفلاین، تمام مسائل باید قبل از شروع وظیفه در نظر گرفته شوند و سیستم مجموعهای از برنامههای زمانبندی (skeds) را تولید کرده و بر اساس آنها عمل میکند. واضح است که اگر تمام وظایف باید انجام شوند و هرگونه تصادف بالقوهای که ممکن است در دوره برنامهریزی رخ دهد شناخته شود، استراتژی برنامهریزی آفلاین میتواند استفاده شود. اما در عمل، معمولاً نمیتوان تمام اطلاعات دقیق را در مورد وظایف و حوادث پیشبینی کرد. تغییرات کوچک در زمان رسیدن AGV به سایت یا تراکم کوتاهمدت در مسیر ممکن است بر برنامهریزی تأثیر گذاشته و حتی آن را مختل کند.
روش برنامهریزی آنلاین این امکان را فراهم میآورد که اطلاعات دریافت شده و تصمیمات بهطور زمان واقعی اجرا شوند، پیشرفت برنامهریزی نظارت شده و رویدادهای پیشبینینشده مدیریت شوند. همچنین یک جایگزین ترکیب استراتژیهای برنامهریزی آفلاین با استراتژیهای برنامهریزی آنلاین وجود دارد.
1. روش برنامهریزی آنلاین و زمان واقعی
در سیستمهای مدیریت چند AGV، محیطها معمولاً تصادفی هستند (زمان سفر، زمانهای بارگیری و تخلیه تغییر میکنند و ممکن است وسایل نقلیه خراب شوند)، بنابراین برنامهریزی باید بهطور دینامیک در زمان واقعی تنظیم شود. یک روش هیبریدی برای حل مسائل برنامهریزی AGVها و مشکلات مسیر بدون برخورد در FMS پیشنهاد شد که مسائل مربوط به برنامهریزی را بهعنوان مشکل اصلی و مسائل مربوط به مسیر را بهعنوان مسائل فرعی در نظر گرفتند. مشکل اصلی را با برنامهریزی محدودیت و مسائل فرعی را با برنامهریزی عدد صحیح مختلط مدلسازی شده و این روش ثابت شد که میتواند برای 6 AGV قابل استفاده باشد.
2.روش برنامهریزی دو مرحلهای
روش برنامهریزی سلسلهمراتبی ترکیب مزایای استراتژی برنامهریزی آفلاین و آنلاین است. یک استراتژی برنامهریزی مبتنی بر روش دو مرحلهای پیشنهاد شد. در مرحله آفلاین، از الگوریتم ژنتیک برای برنامهریزی مسیر بهینه اجتناب از موانع برای AGV در یک محیط ایستا استفاده میشود. در مرحله آنلاین، سیستم تعارضات را در عملیات مرتب کرده و حل میکند. مزایای برنامهریزی آفلاین و آنلاین ترکیب شده و بهبود عملکرد سیستم چند AGV در نظر گرفته شده است. روش پیشنهادی در مرحله اول مسیر بدون برخورد را برنامهریزی کرد و در مرحله دوم از یک روش وقفه برای جلوگیری از بنبست استفاده کرد.
خلاصه
در این دو وبلاگ، سیستم مدیریت چند AGV بهطور جامع بررسی و به سه بخش اصلی ارسال، مسیریابی و برنامهریزی تقسیم شد. نتایج تحقیق نشان میدهند که برای عملکرد بهینه این سیستمها، نیاز به یکپارچگی و هماهنگی اطلاعاتی از جمله موقعیت AGVها، وضعیت سفارشها، مسیرها و ایستگاهها در سطح سیستم وجود دارد. این اطلاعات باید بهطور مداوم و در زمان واقعی بهروز شوند تا عملکرد سیستم تحت شرایط پیچیده و پویا به بهترین شکل ممکن انجام گیرد. از اینرو، استراتژیهای ارسال چندبعدی و الگوریتمهای مسیریابی پویا بهویژه در سناریوهای با ترافیک بالا و پیچیدگی زیاد، مناسبتر هستند.
فرآیند برنامهریزی AGVها بهطور مؤثر تخصیص وظایف و مسیریابی را مدیریت کرده و علاوه بر کاهش زمان و هزینه عملیات، از بروز مشکلات ترافیکی و برخورد جلوگیری میکند. ترکیب بهینه این سه بخش (ارسال، مسیریابی و برنامهریزی) بهعنوان یک مسئله پیچیده و NP-hard شناخته میشود که نیازمند راهکارهای بهینهسازی پیشرفته برای دستیابی به عملکرد بهینه در سیستمهای چند AGV است.



){kind=link}
بدون نظر