


تحلیل مسائل کلیدی در سیستم مدیریت چند AGV
هدف اصلی سیستم مدیریت چند AGV (رباتهای هدایتشونده خودکار) تخصیص صحیح وظایف به هر AGV و اطمینان از اجرای بدون برخورد وظایف است. برای حل مسئله تخصیص منابع در سیستم مدیریت چند AGV، ابتدا باید تعداد و نوع منابع موجود در سیستم مشخص شود. این مسئله را میتوان بهعنوان موضوعی مرتبط با کاهش هزینه در نظر گرفت که با فرآیند تصمیمگیری در سطوح مختلف ارتباط دارد. مسائل برخوردها، بنبستها و همچنین مشکلات مربوط به موقعیت وسایل نقلیه بیکار میتوانند به منظور بهبود عملکرد سیستم مورد بررسی قرار گیرند.
از نظر بهینهسازی سیستم، مدیر ممکن است به دنبال کاهش زمان یا مصرف مسیر کوتاهتر باشد. این رویکرد هدفمحور (goal-oriented) نامیده میشود. تعاملات میان سطوح مختلف سیستم وجود دارد، چرا که نوع نقشهها ممکن است بهطور مستقیم بر پیچیدگی سیستم تأثیر بگذارد و تعداد AGVها نیز میتواند زمان موردنیاز برای انجام وظایف را تحت تأثیر قرار دهد.
رویکرد مبتنی بر منابع
اولین گام در بررسی سیستم مدیریت چند AGV، تعیین منابع موجود در سیستم است. طرحبندیهای مختلف در سیستم تولیدی معرفی شده و همچنین بررسیهایی در مورد طراحی طرحبندی تجهیزات یک AGV در سیستم تولید انعطافپذیر (FMS) انجام شده است. طراحی نقشه بهعنوان مسئلهای اساسی در سیستم چند AGV مطرح است. در مطالعات قبلی سه روش رایج برای طبقهبندی نقشه شامل توپولوژی جریان، تعداد خطوط موازی و جهت جریان مقایسه شدهاند، همانطور که در جدول زیر نشان داده شده است. در این مطالعات، از جهت جریان بهعنوان روش طبقهبندی استفاده شده است.
AGVها نقش اصلی در سیستم دارند و مسئول حملونقل بار و هماهنگی با سایر عملیاتها هستند. تعداد AGVها بهصورت غیرمستقیم بر زمان انجام کارها و پیچیدگی سیستم تأثیر میگذارد. تعداد مناسب AGVها میتواند بازدهی سیستم مدیریت را بهبود بخشد و خطر وقوع حوادث را کاهش دهد.

طراحی نقشه در سیستم
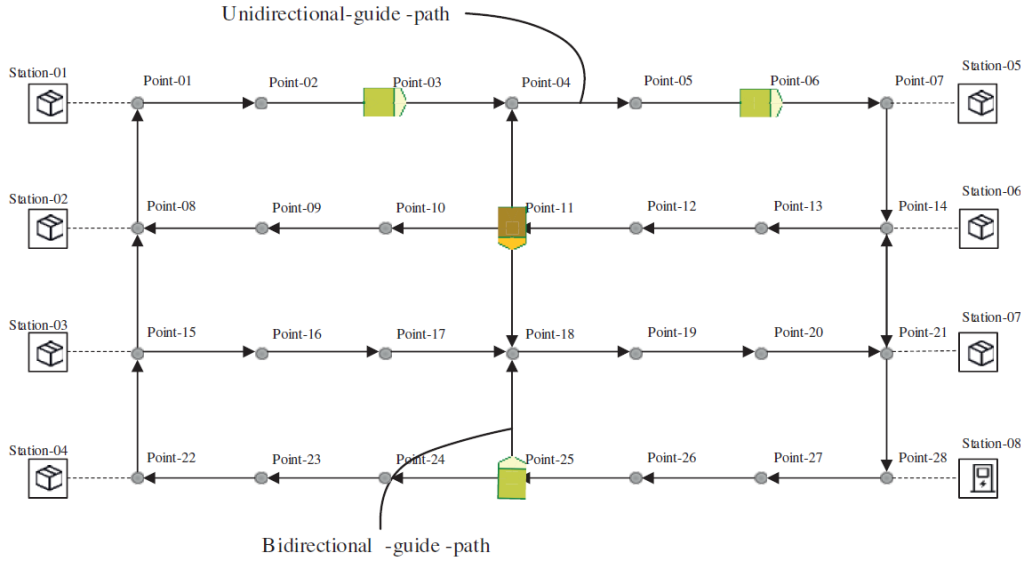
با توجه به جهت ترافیک، مسیرهای وسایل نقلیه به دو روش اصلی قابل طبقهبندی هستند: مسیرهای راهنمای یکطرفه و مسیرهای راهنمای دوطرفه.
همانطور که در شکل زیر نشان داده شده است، در مسیر راهنمای یکطرفه، وسیله نقلیه فقط میتواند در یک جهت مشخص حرکت کند، در حالی که در مسیر راهنمای دوطرفه، وسیله نقلیه میتواند بر اساس نیازهای عملیاتی در هر دو جهت حرکت کند.
سیستم مسیر یکطرفه از نظر عملکرد نسبت به سیستم مسیر دوطرفه پایدارتر است، بهویژه در جلوگیری از تضادها و بنبستهای سیستمی. طراحی مسیر سیستم چند AGV بهصورت یکطرفه، یک روش ساده برای جلوگیری از بنبست است. در بیشتر پایانههای کانتینری بندری، معمولاً از مسیر راهنمای حلقهای تکجهته استفاده میشود و در طول عملیات، عملاً غیرممکن است که AGVها یکدیگر را مسدود کنند.
برای سیستم، یک قانون ترافیکی تکجهته با ایجاد حلقههایی در شبکه پیشنهاد شده است که بهطور قابلتوجهی تضاد وسایل نقلیه را کاهش میدهد. مسئله کمینهسازی زمان کلی (makespan) در طراحی مسیرهای جریان یکطرفه بررسی شده است. مسائل تعیین حلقه حرکت AGV و محل ایستگاههای دریافت و تحویل (P/D) در سیستمهای حلقهای تکجهته بررسی شدهاند.
الگوریتم اجتناب از بنبست و مسدود شدن برای مسیرهای یکطرفه پیشنهاد شده است، با ذکر این نکته که در صورت وجود طرح دوطرفه، باید به جلوگیری از تضاد در جهت مخالف توجه شود.
از آنجا که مسئله مسیر یکطرفه معمولاً آسانتر از راهحل مسیر دوطرفه است، برخی از محققان مسئله دوم را به اول تبدیل کردهاند.
راهحل مسیر دوطرفه درجه آزادی بالاتری نسبت به مسیر یکطرفه دارد، بنابراین تحت شرایط خاص بهتر از مسیر یکطرفه عمل میکند. مسیرهای دوطرفه برای مدلسازی و بهینهسازی سیستمهای تولید انعطافپذیر (FMS) استفاده شدهاند. همچنین، یک الگوریتم ژنتیک با ترکیب الگوریتم دایکسترا برای کاهش زمان کلی انجام وظایف (makespan) در نظر گرفتن تأثیر تعداد AGVها پیشنهاد شده است. در این وبلاگ، چهار طرح و ده وظیفه را به ترتیب آزمایش شده است. الگوریتم PGA-B (الگوریتم ژنتیک پیشنهادی با طرح دوطرفه) در 25 آزمایش مؤثر نشان داده شد.
یک الگوریتم انتخاب مسیری ارائه شده است که تضمین میکند مسیر AGVها بدون برخورد باشد تا کمترین فاصله طیشده را به دست آورد. الگوریتم سیستم کلونی مورچه (ACS) برای حل مسئله طراحی کوتاهترین مسیر (SPDP) در توپولوژی مسیر دوطرفه توسعه یافته است. مسئله زمانبندی و مسیریابی همزمان برای AGVها در محیط مسیر دوطرفه بررسی شده است.
رویکرد تجزیه شبکه پتری برای اعزام همزمان و مسیریابی بدون برخورد در سیستمهای دوطرفه AGV در محیطهای پویا مطرح شده است. در این الگوریتم، شبکه پتری به زیرشبکههای وظیفه و AGV تجزیه شده است. روش تابع جریمه برای بهدستآوردن راهحل برای همه زیرشبکهها استفاده شده است. یک روش اجتناب از بنبست در روش پیشنهادی گنجانده شده است تا امکانپذیری و کیفیت راهحل تضمین شود.
یک طرح جریان مسیر دوطرفه و الگوریتم مسیریابی ارائه شده است که میتواند مسیرهای بدون برخورد و کوتاهترین زمان را برای AGVها تضمین کند. یک برنامهریزی مسیریابی دوطرفه و الگوریتم انتخاب مسیر AGV پیشنهاد شده است. برای به حداقل رساندن فضای مورد نیاز برای طراحی نقشه، شرایط بحرانی برخی از پارامترهای کلیدی بین مسیرها و AGV استخراج شدهاند تا طراحی مسیر و الگوریتمهای مسیریابی پیچیدهتری فراهم شود.
هنگام در نظر گرفتن پیچیدگی سیستم بهتنهایی، راهحل مسیر یکطرفه اغلب برای به حداقل رساندن برخورد AGVها در عملکرد وظایف ترجیح داده میشود. با این حال، راهحل مسیر دوطرفه برای سیستمهای مدیریت چند AGV با نیازهای عملکردی بالاتر مناسبتر است.
طراح باید طرح نقشه مناسبی را انتخاب کند که میان الزامات و تواناییهای فیزیکی سیستم تعادل برقرار کند.
تعداد AGV ها در سیستم
در بسیاری از موارد، تعداد AGVها و زمانی که سیستم برای تکمیل وظایف نیاز دارد، دو مسئله رقابتی هستند. هدف تحقیق، برنامهریزی بهینه برای تحویل مواد اولیه در خطوط مونتاژ با استفاده از حداقل تعداد وسایل نقلیه بوده است. برای تعیین تعداد AGVهای مورد نیاز در یک ترمینال کانتینری، یک مدل شبکهای ایجاد شده است و روش حلی برای تعیین حداقل تعداد AGVهای مورد نیاز ارائه شده است.
تعیین نیازمندی وسایل نقلیه AGV بهعنوان یک مسئله بهینهسازی عمومی تعریف شده است و یک روش جدید برای تعیین این نیاز ارائه شده است.
بهینهسازی اندازه ناوگان AGVها در سیستم تولید انعطافپذیر (FMS) با استفاده از روش تحلیلی و الگوریتم بهینهسازی گرگ خاکستری (GWO) بررسی شده است.
رفتار حالت پایدار شبکه صف بسته با برنامهریزی خطی مدلسازی شده است که مقدار بهینه آن برآورد اندازه ناوگان مورد نیاز بوده است. یک مدل ریاضی چندهدفه بهصورت برنامهریزی عدد صحیح توسعه داده شده است تا تعداد بهینه وسایل نقلیه را تعیین کند و مثالی برای تأیید مدل پیشنهادی ارائه شده است.
یک مدل شبیهسازی طراحی شده است تا تعداد بهینه AGVها را برای افزایش ظرفیت سیستم و برآورده کردن نیازهای حملونقل مواد تعیین کند. مدلی ریاضی برای شناسایی نیازهای حملونقل مواد (MHRs) در سیستم تولید انعطافپذیر ارائه شده است.
سه آزمایش با 20، 40، و 80 AGV برای شبیهسازی مدل پیشنهادی طراحی شدهاند. نتایج نشان داد که نرخ بنبست با 80 AGV تنها اندکی بیشتر از نرخ با 40 AGV بوده است. با این حال، کاهش تعداد AGVها باعث کندی عملکرد سیستم میشود. بنابراین، پیشنهاد میشود که کاهش تعداد AGVها برای کاهش بنبست ارزشمند نیست.
مسئله تعداد بهینه AGVها بررسی شده است. مسئله کوتاهترین زمان حملونقل و مسیریابی بدون برخورد با استفاده از الگوریتم ژنتیک مبتنی بر پنجره زمانی و الگوریتم دایکسترا حل شده است. مقاله اهمیت انتخاب تعداد مناسب AGVها را از طریق آزمایشها برجسته کرده است.
دریافتهاند که سرعت و اندازه ناوگان AGVها نقش مهمی در افزایش یا کاهش ظرفیت سیستم تولید انعطافپذیر دارند. تعامل بین تعداد AGVها و ظرفیت بار آنها در سیستم تولید بررسی شده است. در کاربردهای عملی، تعداد AGVها باید با توجه به تعادلی دقیق بین هزینه وسیله نقلیه، ظرفیت صف، و سایر عوامل طراحی تعیین شود.
در این بخش، بررسی رویکرد مبتنی بر منابع در سیستم مدیریت چند AGV نشان داد که تخصیص منابع بهطور صحیح و بهینه میتواند تأثیر زیادی بر عملکرد سیستم داشته باشد. تعیین منابع موجود، طراحی نقشه مناسب و انتخاب تعداد صحیح AGVها از جمله مسائل کلیدی در این رویکرد هستند که بهطور مستقیم با کاهش هزینهها، بهبود کارایی و کاهش برخوردها و بنبستها مرتبط هستند. استفاده از مسیرهای یکطرفه یا دوطرفه، همچنین تعیین تعداد AGVها با توجه به نیازهای سیستم، میتواند به عملکرد بهینه سیستم مدیریت چند AGV کمک کند. این رویکرد، بستری مناسب برای طراحی و بهینهسازی سیستمهای حملونقل خودکار فراهم میآورد. در وبلاگهای بعدی به بررسی رویکردهای دیگر در این زمینه پرداخته خواهد شد.



){kind=link}
بدون نظر