

در عصر رقابت فشرده میان زنجیرههای تأمین، انبارهای هوشمند به یکی از زیرساختهای حیاتی در صنایع لجستیک، تولید و توزیع تبدیل شدهاند. در این محیطهای خودکار، خودروهای هدایتشونده خودکار (AGV) بهعنوان بازیگران اصلی عملیات درونانبار عمل میکنند و وظیفه جابهجایی سریع، دقیق و ایمن کالاها را بر عهده دارند. با افزایش تعداد AGVها در یک فضای عملیاتی محدود، نیاز به سامانههای رهگیری (Tracking Systems) دقیق، پایدار و مقیاسپذیر بیش از پیش احساس میشود.
رهگیری AGVها نهتنها برای پایش عملکرد آنها ضروری است، بلکه پایهی اصلی بسیاری از فرآیندهای کنترلی از جمله اجتناب از برخورد، بهروزرسانی بلادرنگ مسیرها، و تصمیمگیری هماهنگ میان رباتها به شمار میآید. با این حال، طراحی یک سامانه رهگیری چندرباته (Multi-AGV Tracking) در محیطهای صنعتی با چالشهایی جدی همراه است؛ از جمله پوشش ناپیوسته سنسورها، تداخل سیگنالها، هزینهی بالای تجهیزات محلیسازی پیشرفته، و نیاز به دقت بالا در تشخیص موقعیت مکانی در زمان واقعی.
روشهای سنتی مانند استفاده از LiDAR، GPS محلی، RFID یا کدهای QR روی زمین، هریک محدودیتهایی دارند: یا نیازمند زیرساختهای گرانقیمت هستند، یا دقت کافی برای رهگیری همزمان چند AGV را ندارند. از طرف دیگر، با توسعه فناوری بینایی ماشین، راهکارهای مبتنی بر بینایی کلی (Global Vision) که از طریق یک یا چند دوربین بالاسری اطلاعات محیط را دریافت میکنند، بهعنوان گزینهای جذاب برای پایش AGVها مطرح شدهاند.
در همین راستا، مقاله پیشرو با هدف طراحی و پیادهسازی یک سامانه رهگیری دقیق و سبکوزن برای چند AGV در یک انبار هوشمند، از ترکیب بینایی کلی و برچسبهای AprilTag بهره میبرد؛ سیستمی که بتواند در زمان واقعی، موقعیت و وضعیت چند ربات را با دقت بالا رهگیری کرده و به سیستم کنترلی مرکزی تحویل دهد.
نکته کلیدی این مقاله، طراحی یک چارچوب ساده ولی دقیق برای تشخیص و تفکیک AGVها با استفاده از شناسههای نوری منحصربهفرد است؛ راهکاری که هم هزینه پیادهسازی را کاهش میدهد و هم قابلیت تعمیم به ناوگانهای بزرگتر را دارد. در ادامه، با چالشها، نوآوریها و نتایج عملکرد این سیستم آشنا خواهیم شد؛ سیستمی که گامی مؤثر در جهت پایدارسازی و هوشمندسازی عملیات AGVها در انبارهای نسل آینده محسوب میشود.
چالشها
۱. پایداری و دقت در رهگیری همزمان چند AGV
زمانی که چند AGV در حال حرکت در مسیرهای متقاطع یا نزدیک به یکدیگر هستند، سیستم رهگیری باید بتواند موقعیت، جهت حرکت، و هویت هر ربات را بدون اشتباه تفکیک کند. هرگونه اختلاط در شناسهها یا نوسان در مکانیابی میتواند منجر به تصمیمگیری اشتباه در کنترل مرکزی شده و در نهایت باعث برخورد، توقف یا کاهش راندمان عملیاتی شود. این نیاز به دقت بالا در سطح پیکسل و همزمانی اطلاعات دارد.
۲. چالشهای نوری در محیط واقعی (نور محیط، بازتاب، سایهها)
در بسیاری از انبارها، روشنایی یکنواخت وجود ندارد و نور طبیعی و مصنوعی ممکن است بهشکل ناهمگون پخش شود. تابش مستقیم نور از پنجرهها، بازتاب روی سطوح فلزی، یا سایههای متحرک ناشی از قفسهها یا بازوهای مکانیکی، همه میتوانند الگوریتمهای بینایی را دچار خطا کنند. پایداری سیستم در برابر این تغییرات نوری یکی از معیارهای کلیدی برای قابلیت اعتماد در صنعت است.
۳. محدودیت زاویه دید و پوشش فضا توسط دوربینها
هر دوربین یک زاویه میدان دید مشخص دارد که وابسته به ارتفاع نصب، نوع لنز و ابعاد محیط است. در انبارهای بزرگ یا پلتفرمهایی با موانع مرتفع، ممکن است بخشهایی از مسیر از دید دوربین خارج شوند. در چنین شرایطی، نیاز به نصب چند دوربین و ادغام فریمها به وجود میآید که مدیریت همترازی و همزمانی آنها، پیچیدگی فنی قابلتوجهی به سیستم اضافه میکند.
۴. بار پردازشی بالا برای تحلیل ویدئو در زمان واقعی
سامانه باید بتواند در هر ثانیه، چندین فریم تصویری را پردازش کند، برچسبهای نوری را تشخیص دهد، موقعیت و زاویه AGVها را محاسبه کند و نتایج را در لحظه به سرور ارسال کند. این فرآیند، بهویژه با افزایش تعداد رباتها یا نرخ فریم بالا، به بار پردازشی شدیدی منجر میشود که نیاز به GPU یا واحدهای پردازش تصویر قدرتمند دارد. عدم پاسخگویی بهموقع، تمام مزیت رهگیری بلادرنگ را از بین خواهد برد.
۵. تطبیقپذیری با ناوگان متنوع AGV و تغییرات آینده
در عمل، ممکن است یک انبار از AGVهایی با سایز، ارتفاع، فرم بدنه یا سرعت متفاوت استفاده کند. یک سیستم رهگیری موفق باید بتواند بدون نیاز به بازتنظیم سختافزاری یا آموزش مجدد، این تنوع را مدیریت کرده و همچنان دقت بالا را حفظ کند. این موضوع همچنین به معنی طراحی معماری نرمافزاری منعطف و الگوریتمهای مقیاسپذیر است تا در آینده نیز قابل توسعه باقی بماند.
۶. نیاز به شناسههای نوری مقاوم، سبک و بدون تداخل
برچسبهای نوری مانند AprilTag باید نهتنها قابل تشخیص از فاصله دور و زوایای مختلف باشند، بلکه باید نسبت به پارامترهایی مثل ساییدگی، گردوغبار، نورهای مایل و لرزش مقاوم باشند. نصب این برچسبها نباید مانع عملکرد حسگرهای دیگر AGV، تهویه یا بارگیری آن شود. طراحی موقعیت نصب، زاویه چسباندن و انتخاب نسخه مناسب از AprilTag برای تضمین عملکرد پایدار حیاتی است.
دیدگاه نو (نگاهی نوآورانه به مسئله رهگیری AGVها در انبارهای هوشمند)
در دهههای گذشته، تلاش برای رهگیری موقعیت خودروهای هدایتشونده خودکار (AGV) عمدتاً بر مبنای حسگرهای محلی، کدهای کف زمین، یا سیگنالهای RFID بوده است. این روشها گرچه در برخی سناریوهای ایستا و کمتراکم کاربردپذیر بودهاند، اما با افزایش پیچیدگی محیط، تنوع ناوگان، و نیاز به مقیاسپذیری بالا، کارایی آنها کاهش مییابد. آنچه مقالهی حاضر مطرح میکند، بازتعریف این مسئلهست از زاویهای کاملاً متفاوت: رهگیری AGVها نه از درون، بلکه از بیرون؛ نه با سختافزارهای متعدد، بلکه با بینایی هوشمند و الگوریتمهای نرمافزاری دقیق.
این دیدگاه، بر پایه دو ستون اصلی بنا شده است:
۱. بینایی کلی (Global Vision) بهجای سیستمهای وابسته به AGV
در سیستمهای سنتی، هویت و موقعیت هر AGV از طریق دادههای داخلی آن یا حسگرهای نصبشده در زیرساخت تأمین میشود. این روشها نیاز به کالیبراسیون دقیق، نگهداری پرهزینه، و پیادهسازی پیچیده دارند. در مقابل، رویکرد مقاله، کل فضای عملیاتی را از نمای بالا تحت نظر میگیرد. با استفاده از یک یا چند دوربین بالاسری، سامانه میتواند موقعیت همه AGVها را در هر لحظه بهصورت همزمان استخراج کند، بدون آنکه نیاز به ارتباط فیزیکی یا دادهای مستقیم با خود AGV وجود داشته باشد.
این دیدگاه، نهتنها سادگی زیرساخت را تضمین میکند، بلکه امکان پایش کامل، بلادرنگ و مقیاسپذیر را فراهم میسازد — چیزی که در روشهای مبتنی بر حسگرهای پراکنده یا دادهمحور بهسختی قابل تحقق است.
۲. بهرهگیری از AprilTag بهعنوان شناسه نوری هوشمند
در قلب این سیستم بینایی، از برچسبهای AprilTag بهعنوان هویتساز نوری برای هر AGV استفاده میشود. این برچسبها که نوعی کد دوبعدی مقاوم و سبکوزن هستند، از فاصلههای بالا و زوایای مختلف قابل شناساییاند، و برخلاف QR Code یا بارکدهای سنتی، میتوانند نهفقط شناسه عددی AGV، بلکه زاویه چرخش آن نسبت به محیط را نیز با دقت بالا ارائه دهند.
نویسندگان با انتخاب دقیق این فناوری، نشان دادهاند که نیازی به تجهیزات گرانقیمت، جیپیاس محلی یا سنسورهای حرکتی برای هر AGV وجود ندارد؛ بلکه با ترکیب صحیح بینایی ماشین و طراحی شناسه، میتوان اطلاعات مکانی و جهتی دقیق را بهسادگی از تصویر استخراج کرد. این نگاه «اطلاعات از تصویر» بهجای «اطلاعات از سختافزار»، انقلابی در سادهسازی معماری سیستم بهشمار میآید.
یکپارچهسازی سادگی فیزیکی و پیچیدگی نرمافزاری
نکته درخشان این رویکرد، در تضاد ظاهری آن نهفته است: سادگی فیزیکی در برابر پیچیدگی نرمافزاری. برخلاف سیستمهایی که سعی دارند با افزودن سنسور و سختافزار، دقت را افزایش دهند، این سامانه بهجای گسترش فیزیکی، بر هوشمندسازی الگوریتمها، کالیبراسیون دقیق تصویر و پردازش بلادرنگ دادههای ویدئویی تکیه کرده است. این انتخاب، علاوهبر کاهش هزینهها، موجب افزایش پایداری، کاهش نقاط ضعف مکانیکی و تسهیل نگهداری سیستم در طول زمان میشود.
نتیجه این دیدگاه: رهگیری مقاوم، مقیاسپذیر و قابلپیادهسازی در صنعت
دیدگاه نو این مقاله، در نهایت منجر به طراحی سیستمی شده که با چند دوربین ساده، برچسبهای سبک و الگوریتمهایی که روی هر کامپیوتر صنعتی اجرا میشوند، میتواند بدون نیاز به تغییر AGVها یا محیط، یک سامانه رهگیری صنعتی دقیق، پایدار و آیندهنگر بسازد. این همان چیزیست که بسیاری از انبارها و خطوط تولید برای ورود به فاز «اتوماسیون هوشمند واقعی» به آن نیاز دارند.
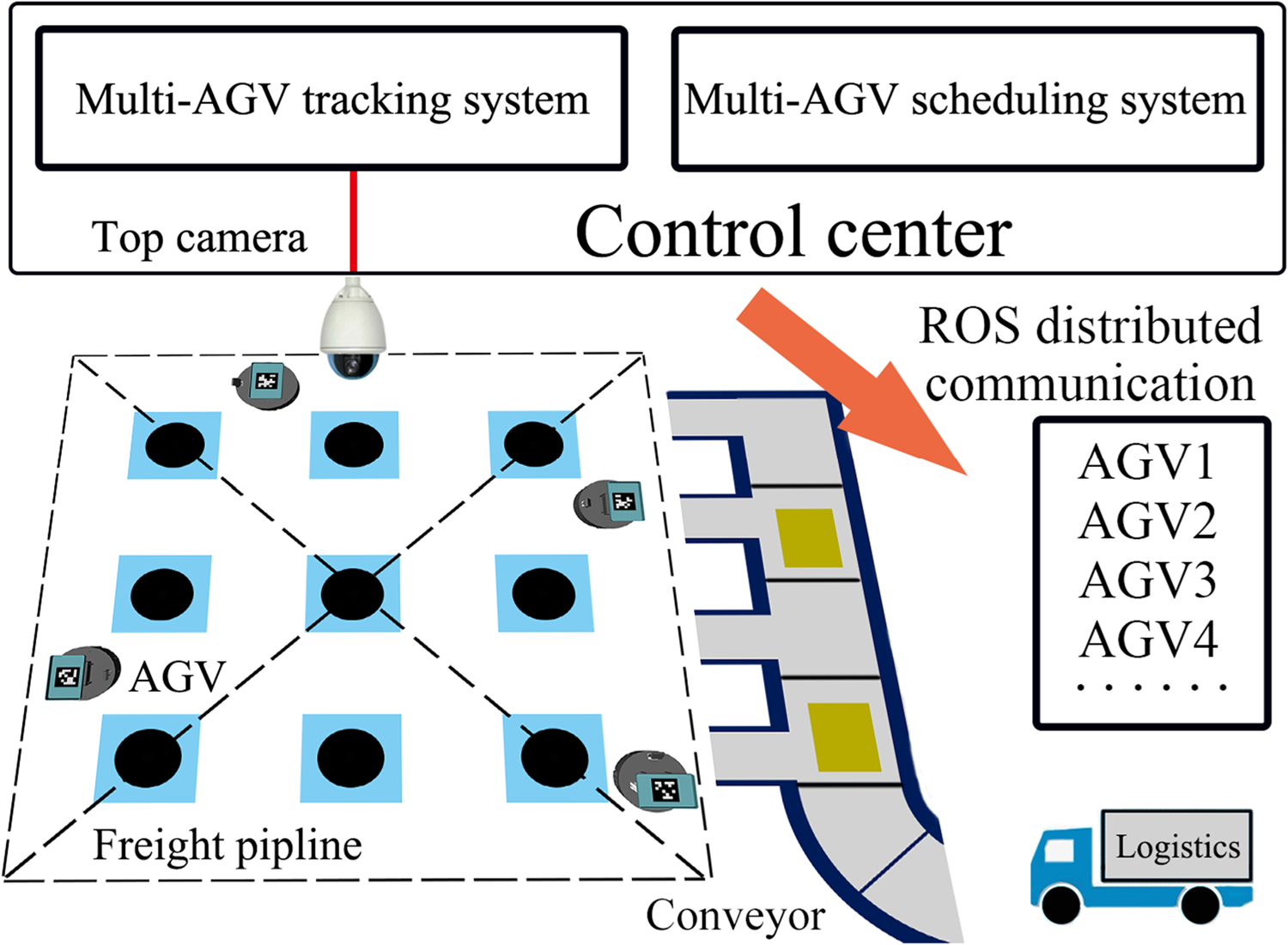
روش پیشنهادی (چارچوب رهگیری چند AGV مبتنی بر بینایی کلی و AprilTag)
روش ارائهشده در این مقاله، یک سامانهی رهگیری هوشمند برای چند AGV است که با بهرهگیری از تصویربرداری کلی محیط (global vision) و برچسبهای نوری AprilTag، بهصورت بلادرنگ موقعیت و وضعیت رباتها را تشخیص میدهد. این سیستم بهگونهای طراحی شده که با کمترین پیچیدگی سختافزاری، بیشترین دقت، پایداری و مقیاسپذیری را فراهم کند. چارچوب کلی شامل چهار گام اصلی است:
۱. طراحی شناسههای نوری برای هر AGV
برای هر AGV، یک شناسه نوری منحصربهفرد از نوع AprilTag انتخاب و روی بدنه آن نصب میشود. برچسبها در موقعیت بالایی AGV قرار میگیرند تا توسط دوربینهای بالاسری بهراحتی قابلمشاهده باشند. هر AprilTag دارای یک شناسه عددی یکتا (ID) و الگویی منحصربهفرد است که توسط الگوریتمهای پردازش تصویر بهراحتی شناسایی میشود. این شناسهها طوری طراحی شدهاند که حتی در صورت چرخش، تغییر نور یا زاویه دید، همچنان قابلتشخیص باقی بمانند.
۲. تصویربرداری کلی با دوربینهای بالاسری
دوربینهای صنعتی در موقعیت بالای فضای عملیاتی نصب شدهاند و کل ناحیه کاری AGVها را پوشش میدهند. این دوربینها بهصورت پیوسته از محیط تصویر میگیرند و تصاویر را با نرخ فریم بالا (معمولاً 30fps یا بیشتر) به سیستم مرکزی ارسال میکنند. برای جلوگیری از اعوجاج و خطاهای پرسپکتیو، موقعیت نصب، ارتفاع، زاویه دوربین و نوع لنز با دقت انتخاب و کالیبره شدهاند.
۳. پردازش تصویر و استخراج ویژگیهای AGVها
در این مرحله، هر فریم تصویری بهصورت بلادرنگ پردازش میشود. الگوریتمهای تشخیص AprilTag بهکار گرفته میشوند تا:
مکان دقیق مرکز برچسب (مختصات X و Y) استخراج شود.
زاویه چرخش برچسب نسبت به محور افقی (yaw angle) محاسبه شود.
شناسه عددی هر برچسب تشخیص داده شود (جهت تعیین هویت AGV).
با این اطلاعات، سیستم بهسادگی میتواند برای هر فریم، موقعیت دقیق و زاویه حرکتی هر AGV را تعیین کند. حتی اگر چند ربات نزدیک به هم باشند، چون AprilTagها دارای شناسه یکتا هستند، تداخلی در تشخیص ایجاد نمیشود.
۴. بهروزرسانی پایگاهداده موقعیت و ارسال اطلاعات به سیستم کنترل مرکزی
نتایج استخراجشده در هر لحظه، در پایگاهداده مرکزی ذخیره میشوند. برای هر AGV، رکوردی شامل زمان، مختصات، زاویه و شناسه ثبت میشود. این اطلاعات در اختیار لایههای بالادستی سیستم کنترلی قرار میگیرد تا بر اساس آن، عملیاتهای مسیریابی، اجتناب از برخورد، و هماهنگی وظایف بین رباتها انجام شود.
بهدلیل سبک بودن دادهها (اعداد عددی ساده)، ارسال و ذخیرهسازی آنها بسیار سریع و کمهزینه است و امکان بهروزرسانی با نرخ بالا فراهم میشود.
۵. ساختار نرمافزاری و ابزارهای استفادهشده
سامانه پردازش تصویر با استفاده از کتابخانه AprilTag Detection و بستر OpenCV پیادهسازی شده است. این انتخاب بهدلیل سبکی، قابلاعتماد بودن و سازگاری بالا با سختافزارهای صنعتی انجام شده. اطلاعات پردازششده بهصورت لحظهای از طریق شبکه محلی (LAN یا WiFi صنعتی) به سیستم کنترلی منتقل میشود.
همچنین برای بهبود پایداری، الگوریتمها طوری طراحی شدهاند که در صورت از دست رفتن فریم یا تار شدن موقت تصویر، با استفاده از دادههای پیشین، موقعیت AGV را تخمین زده و سیستم را پایدار نگه دارند.
این روش با کمترین پیچیدگی فیزیکی، بدون نیاز به حسگرهای محلی یا زیرساخت زمینی، قادر است چند AGV را بهطور همزمان، دقیق، پایدار و اقتصادی رهگیری کند. همین ترکیب سادهسازی سختافزاری و دقت نرمافزاری، نقطه قوت اصلی سیستم پیشنهادی بهشمار میآید.
پیادهسازی (از طراحی الگوریتم تا آزمون در محیط واقعی)
کارآمدی هر سامانه صنعتی، زمانی اثبات میشود که بتواند در شرایط عملیاتی، با تمام محدودیتها و نویزهای محیطی، عملکردی پایدار و قابلاعتماد ارائه دهد. نویسندگان این مقاله با همین رویکرد، سیستم رهگیری خود را در یک بستر آزمایشگاهی مبتنی بر انبار هوشمند واقعی پیادهسازی کردهاند تا میزان دقت، پایداری و کارایی آن را در عمل بسنجند.
۱. محیط آزمون شبیهسازیشده با ساختار انبار واقعی
برای اجرای آزمایش، یک محیط فیزیکی طراحی شده که ساختار آن مشابه با انبارهای هوشمند صنعتی است. در این محیط، مسیرها بهصورت شبکهای طراحی شدهاند و چند AGV کوچک (شبیهسازیشده یا واقعی) با ابعاد متفاوت در حال حرکت هستند. روی هر AGV، یک برچسب AprilTag نصب شده و دوربین بالاسری، از ارتفاع مشخص، تمام منطقه را پوشش میدهد.
این محیط از نظر تراکم مسیر، نور محیط، چیدمان رباتها و زاویه دوربین، بهگونهای طراحی شده که شرایطی نزدیک به واقعیت صنعتی را بازآفرینی کند.
۲. نصب و کالیبراسیون دقیق دوربین بالاسری
یک دوربین صنعتی با لنز مناسب (معمولاً wide-angle یا fisheye) در ارتفاع مشخص نصب شده و پس از آن، مراحل کالیبراسیون با دقت انجام گرفته تا خطاهای پرسپکتیو، اعوجاج لنز و انحراف زاویهای به حداقل برسند. مکان نصب دوربین طوری انتخاب شده که تمام فضای عملیاتی تحت پوشش باشد و حتی حرکتهای سریع AGVها نیز از فریم دوربین خارج نشود.
۳. پیادهسازی نرمافزاری با OpenCV و AprilTag Library
ماژولهای پردازش تصویر و شناسایی برچسبها با استفاده از کتابخانههای متنباز (از جمله OpenCV و AprilTag) پیادهسازی شدهاند. در هر فریم، سیستم قادر است شناسه برچسب (ID)، مختصات دقیق مرکز AGV و زاویه چرخش ربات (Heading angle) را استخراج کرده و بهصورت ساختاریافته به سیستم کنترلی مرکزی ارسال کند. بهمنظور افزایش نرخ پاسخدهی، پردازش تصاویر بهصورت multi-threaded انجام شده و برای جلوگیری از تأخیر، فقط اطلاعات حیاتی ذخیره و منتقل میشود.
۴. آزمون همزمان چند ربات و بررسی دقت سیستم
در آزمون میدانی، چند AGV بهصورت همزمان در مسیرهای مختلف حرکت میکنند. سیستم در هر لحظه، موفق به رهگیری دقیق موقعیت و جهت همهی AGVها شده و هیچگونه اختلاط یا خطای شناسایی گزارش نشده است.
در آزمونهای انجامشده، دقت مکانی رهگیری در حدود ±3 سانتیمتر و دقت زاویهای در حدود ±2 درجه گزارش شده است؛ مقادیری که برای بیشتر کاربردهای صنعتی کاملاً قابل قبول و عملیاتی هستند.
۵. سازگاری با تغییرات نوری و حرکت دینامیک AGVها
در طول آزمایش، سیستم توانست در شرایط نوری متغیر (نور سفید سقفی، سایههای جزئی، بازتاب سطوح) همچنان عملکرد پایداری داشته باشد. همچنین در موقعیتهایی که رباتها به یکدیگر نزدیک میشدند یا بهصورت متقاطع حرکت میکردند، الگوریتم موفق به تفکیک دقیق آنها شد و هیچ تداخلی در هویت یا موقعیت ثبت نشد.
۶. ساختار دادهای مناسب برای کنترل مرکزی
اطلاعات استخراجشده از پردازش تصویر، در قالب رکوردهای سبک (ID، X، Y، زاویه، زمان) به سرور مرکزی ارسال میشوند. این دادهها در لایه بالادست برای تحلیل مسیر، اجتناب از برخورد، و تصمیمگیری درباره توزیع وظایف مورد استفاده قرار میگیرند.
نکته مهم این است که سیستم قابلیت پشتیبانی بلادرنگ تا ۱۰ AGV بهصورت همزمان را دارد بدون اینکه تأخیر یا افت دقت محسوسی ایجاد شود. این پیادهسازی نشان داد که روش پیشنهادی مقاله، نهفقط در محیطهای شبیهسازیشده بلکه در شرایط نزدیک به واقعیت صنعتی نیز قابل اجراست؛ آن هم با دقت بالا، پایداری مناسب، و پیچیدگی بسیار کم در سختافزار. این همان چیزی است که یک صنعتگر یا مهندس بهرهبردار در فاز اجرا بهدنبال آن است: سادگی در اجرا، اطمینان در عملکرد.
کاربرد صنعتی و نتایج عملکرد (رهگیری دقیق، بیوقفه و مقیاسپذیر در انبارهای هوشمند)
یکی از مهمترین معیارهای پذیرش یک سامانه فناورانه در صنعت، سازگاری آن با شرایط واقعی، قابلیت اطمینان در زمان اجرا و ارزش افزودهایست که در فرآیندهای عملیاتی ایجاد میکند. در این مقاله، روش پیشنهادی برای رهگیری چند AGV نهفقط بهصورت تئوری یا در شبیهسازی، بلکه در بستر واقعی آزموده شده و توانسته با معیارهای صنعتی، عملکردی قابلاتکا از خود نشان دهد.
۱. رهگیری دقیق بلادرنگ چند AGV بهصورت همزمان
آزمایشهای عملی نشان داد که سیستم پیشنهادی قادر است چند AGV را بهصورت همزمان با دقت مکانی ±3 سانتیمتر و دقت زاویهای ±2 درجه رهگیری کند. این دقت برای اکثر کاربردهای صنعتی مانند مسیربندی، اجتناب از برخورد، بارگیری و هماهنگی ناوگان کاملاً کافی است. مهمتر اینکه، این عملکرد بدون نیاز به هیچ سختافزار پیچیدهای روی خود AGVها انجام شده است.
۲. کاهش پیچیدگی زیرساختی در مقایسه با راهحلهای سنتی
در سیستمهایی که مبتنی بر RFID، LiDAR، IMU یا کدهای QR هستند، نصب تجهیزات روی AGV، نگهداری از سطح زمین و نیاز به کالیبراسیونهای مداوم، هزینهها و خرابیهای زیادی را به سیستم تحمیل میکند. اما در این روش، تنها با نصب چند دوربین بالاسری و برچسبهایی سبک و ارزان، بخش زیادی از پیچیدگیها حذف شده و قابلیت اطمینان کلی سیستم افزایش یافته است.
۳. افزایش مقیاسپذیری برای ناوگانهای بزرگتر
با توجه به اینکه سیستم رهگیری تنها متکی به تشخیص AprilTag و پردازش تصویر است، در صورت افزایش تعداد AGVها، نیازی به بازطراحی زیرساخت یا افزودن حسگر به هر ربات وجود ندارد. شناسههای نوری بهسادگی قابل اضافه شدن هستند و سیستم قادر است تا دهها AGV را بهصورت همزمان و بدون تداخل شناسایی و دنبال کند. این ویژگی برای صنایع در حال رشد، یک مزیت راهبردی بهشمار میآید.
۴. سازگاری با محیطهای متغیر و شرایط نوری صنعتی
در آزمایشها مشخص شد که حتی در حضور نورهای غیر یکنواخت، سایههای متحرک، بازتاب سطوح فلزی یا تغییرات نور طبیعی، سیستم قادر به حفظ دقت و پایداری است. این پایداری نوری باعث میشود که سامانه در محیطهای واقعی و پرتغییر صنعتی قابل استفاده باقی بماند، بدون آنکه نیاز به محیطسازی خاص یا نورپردازی مصنوعی داشته باشد.
۵. کاربردپذیری در صنایع مختلف
روش پیشنهادی را میتوان بهراحتی در صنایعی مانند: لجستیک و انبارداری خودکار، مراکز پردازش سفارشات آنلاین، صنایع تولیدی با ناوگان رباتیک داخلی و صنایع غذایی و دارویی (به دلیل سادگی سختافزار و عدم نیاز به تماس فیزیکی)
بهکار برد. بهویژه در محیطهایی که زیرساخت فیزیکی کف زمین قابل تغییر نیست یا AGVها متحرک و متنوعاند، این روش میتواند راهحلی منعطف و اقتصادی باشد.
۶. کاهش هزینه، افزایش عمر سیستم و قابلیت نگهداری آسان
حذف نیاز به سنسورهای گران، کاهش سایش در تجهیزات زمینی، نبود کابلکشیهای پیچیده و کاهش نیاز به کالیبراسیون مکرر، همه از عواملی هستند که باعث میشوند هزینه نگهداری این سیستم بسیار پایینتر از روشهای سنتی باشد. همچنین چون عمده منطق رهگیری در نرمافزار اجرا میشود، بهروزرسانی و بهینهسازی آن در آینده بسیار ساده و کمهزینه خواهد بود.
در مجموع، روش رهگیری معرفیشده در این مقاله، یک راهحل ساده اما بسیار مؤثر برای یکی از حیاتیترین نیازهای انبارهای هوشمند مدرن محسوب میشود: رهگیری دقیق، پایدار و قابلاعتماد چند AGV، با زیرساخت سبک و مقیاسپذیر. این مزیتها، آن را به گزینهای بسیار جذاب برای استقرار در مقیاس صنعتی تبدیل کرده است.
جمعبندی نهایی (رهگیری هوشمند، ساده و آیندهنگر برای AGVها)
در چشمانداز آینده انبارهای هوشمند، رباتهای خودران نقشی حیاتی در تسریع جریان کالا، کاهش هزینههای عملیاتی و ارتقای بهرهوری کلی زنجیره تأمین ایفا خواهند کرد. اما برای آنکه این سیستمها بهدرستی کار کنند، وجود یک سامانه رهگیری دقیق، پایدار و هماهنگکننده میان AGVها الزامی است. مقالهی حاضر، با ارائهی یک راهکار خلاقانه، سبکوزن و صنعتی برای رهگیری چند AGV بر پایه بینایی کلی و برچسبهای AprilTag، گامی مؤثر در این مسیر برداشته است.
در این روش، بدون نیاز به نصب حسگرهای پیچیده روی رباتها یا تجهیز محیط به زیرساختهای فیزیکی سنگین، تنها با چند دوربین و الگوریتمهای بینایی ماشین، میتوان مکان، زاویه حرکت و هویت هر AGV را در لحظه تشخیص داد. این رهگیری با دقت بالا، پایداری در شرایط نوری صنعتی، و قابلیت تفکیک رباتها حتی در سناریوهای پرتراکم، انجام میشود.
مزایای این روش از نظر صنعتی کاملاً ملموس است:
سادگی در پیادهسازی و نگهداری،
قابلیت مقیاسپذیری سریع با افزایش تعداد AGVها،
کاهش هزینههای عملیاتی و نگهداری در مقایسه با روشهای سنتی،
و امکان استفاده در صنایع مختلف بدون نیاز به بازطراحی زیرساخت.
فراتر از دستاوردهای فنی، این مقاله نشان میدهد که هوشمندسازی عملیات انبار، الزاماً با افزایش پیچیدگی و هزینه همراه نیست؛ بلکه با طراحی هوشمند، انتخاب فناوریهای سبک و تکیه بر نرمافزار بهجای سختافزار، میتوان سامانههایی ساخت که هم قابل اعتمادند و هم آیندهنگر.
این مسیر، تنها نقطه آغاز تحول در رهگیری چند AGV است؛ مسیرهایی که در آن، ترکیب بینایی ماشین، شناسایی نوری و الگوریتمهای کنترلی هوشمند، آینده اتوماسیون را بازتعریف خواهند کرد.
راهکار رهگیری هوشمند AGV را با ما تجربه کنید
اگر بهدنبال ارتقای سیستم انبارداری خود با رباتهای خودران هستید، یا در حال طراحی زیرساخت لجستیک هوشمند برای آیندهاید، تیم ما در پارازانژ آماده است تا تجربهای واقعی از اتوماسیون پایدار، دقیق و مقیاسپذیر را به شما ارائه دهد. ما با تمرکز بر طراحی و پیادهسازی سامانههای رهگیری بلادرنگ AGV، به شما کمک میکنیم تا بهرهوری سیستم را افزایش دهید و هزینههای نگهداری را کاهش دهید. از طراحی پایلوت تا پیادهسازی در مقیاس صنعتی، در کنار شما هستیم.
📞 همین حالا با ما تماس بگیرید و برای مشاوره تخصصی وقت بگیرید.
اطلاعات مرجع مقاله
Title: Multi-AGV Tracking System Based on Global Vision and AprilTag in Smart Warehouse
Authors: Zeyu Chen, Xuebin Zhang, Yunfeng Zhang
Published in: 2023 IEEE 11th International Conference on Computer Science and Network Technology (ICCSNT)
DOI: https://doi.org/10.1109/TASE.2015.2446614
Publisher: IEEE
Year: 2023



{kind=link}
بدون نظر