

راهکارهای مقاومسازی رباتهای خودران در برابر خطاهای سنسوری با VINS-Mono
در دههی اخیر، رباتهای خودران و سامانههای هوشمند ناوبری به یکی از ارکان اصلی صنایع پیشرفته و زیرساختهای آینده تبدیل شدهاند. حضور این فناوریها تنها به حوزهی آکادمیک محدود نمانده، بلکه صنایع بزرگ در بخشهای مختلف مانند لجستیک، خودروسازی، حملونقل هوشمند، معادن، نفت و گاز، و حتی صنایع ساختمانی بهطور گسترده به سمت بهرهبرداری از آنها حرکت کردهاند. این تحول ناشی از یک نیاز بنیادین است: دقت، ایمنی و پایداری در ناوبری و تخمین حالت رباتها. هر ربات یا وسیلهی خودران، صرفنظر از نوع مأموریت، نیازمند آن است که در هر لحظه موقعیت و وضعیت حرکتی خود را با بیشترین دقت بداند. این موضوع نهتنها برای افزایش کارایی، بلکه برای تضمین ایمنی انسانها و زیرساختهای اطراف حیاتی است.
با وجود این اهمیت، دستیابی به تخمین حالت دقیق در دنیای واقعی با چالشهای جدی مواجه است. بسیاری از راهکارهای مرسوم، مانند استفاده صرف از GPS یا دوربینهای چندگانه، در محیطهای عملیاتی واقعی ناکافی یا پرهزینه هستند. در فضاهای سرپوشیده نظیر کارخانهها، انبارها و معادن، سیگنالهای GPS یا وجود ندارند یا با خطای شدید همراهاند. همچنین، استفاده از سختافزارهای گرانقیمت و پیچیده نهتنها هزینههای تولید و نگهداری را افزایش میدهد، بلکه مقیاسپذیری فناوری را نیز محدود میکند. بنابراین، یک پرسش کلیدی در صنعت مطرح میشود: چگونه میتوان با حداقل سختافزار و حداکثر بهرهوری، یک سیستم مقاوم و پایدار برای ناوبری رباتهای خودران ایجاد کرد؟
در همین نقطه، مفهوم سیستمهای بینایی-اینرسی (Visual-Inertial Systems) اهمیت خود را نشان میدهد. ترکیب دادههای بصری از یک دوربین تکچشمی با دادههای اینرسی از یک IMU ساده، راهکاری هوشمندانه برای رسیدن به تخمین حالت دقیق و مقاوم است. دوربین اطلاعات محیطی با جزئیات بالا را فراهم میکند، در حالی که IMU سرعت و شتاب را در مقیاس زمانی بالا ثبت میکند. ادغام این دو منبع داده میتواند ضعفهای هر یک را پوشش داده و یک راهکار کمهزینه، سبک و کممصرف ارائه دهد. با این حال، این رویکرد در عمل با محدودیتهایی همچون رانش تدریجی (drift)، مشکلات در مرحلهی اولیهسازی (Initialization)، و چالشهای نقشهبرداری طولانیمدت مواجه بوده است. همین نقاط ضعف باعث شده بسیاری از صنایع نسبت به بهکارگیری عملی این فناوری تردید داشته باشند.
مقالهی VINS-Mono دقیقاً در پاسخ به این چالشها توسعه یافته است. این الگوریتم با طراحی یک چارچوب مقاوم، دقیق و همهجانبه، نشان داده است که میتوان تنها با استفاده از یک دوربین تکچشمی و یک IMU ارزانقیمت، سیستمی ساخت که نهتنها محدودیتهای فنی گذشته را برطرف کند، بلکه قابلیتهای جدیدی همچون بازیابی موقعیت (Relocalization)، اصلاح خطای تجمعی (Loop Closure) و ادغام و بازاستفاده از نقشهها را نیز در اختیار صنعت قرار دهد. نکتهی برجستهی این فناوری آن است که هم در محیطهای کوچک و کنترلشده (مانند پرواز یک پهپاد در فضای محدود) و هم در مقیاسهای بسیار بزرگ (مانند ناوبری چند کیلومتری در محیطهای باز) عملکردی قابل اعتماد ارائه میدهد.
در نتیجه، این الگوریتم نه تنها یک دستاورد دانشگاهی محسوب میشود، بلکه بهعنوان یک راهکار صنعتی آماده برای استفاده در رباتهای خودران قابل توجه است. اهمیت چنین فناوریهایی در جایی بیشتر نمایان میشود که صنایع به دنبال کاهش هزینهها، افزایش بهرهوری، و تضمین ایمنی در عملیاتهای بدون خطا هستند. بنابراین، VINS-Mono را باید فراتر از یک الگوریتم صرف دانست؛ این سیستم در حقیقت یک ماژول مقاومسازی سنسوری برای آیندهی رباتهای خودران است که میتواند آنها را از محدودیتهای سختافزاری و خطاهای غیرقابل اجتناب سنسورها رها سازد.
اگر به تاریخچهی سامانههای ناوبری نگاه کنیم، میبینیم که وابستگی به سنسورهای تکمنبعی همواره یک نقطهضعف جدی محسوب شده است. در گذشته، بسیاری از رباتها و خودروهای هوشمند صرفاً بر پایهی GPS یا سیستمهای بینایی صرف (Vision-only) توسعه مییافتند. اما این رویکردها در شرایط واقعی شکست میخوردند. برای مثال، در یک کارخانهی سرپوشیده یا تونل شهری، سیگنال GPS بهشدت ضعیف یا غیرقابل دسترس است. از سوی دیگر، دوربین تکچشمی هرچند تصویری با جزئیات بالا از محیط فراهم میکند، اما بهتنهایی نمیتواند مقیاس واقعی فاصلهها را محاسبه کند و بهراحتی تحت تأثیر عواملی چون تغییر نور، بافت ضعیف محیط یا تارشدگی ناشی از حرکت قرار میگیرد. این ضعفها باعث شدند که صنعت به سمت ادغام دادههای چندسنسوری حرکت کند.
اولین تلاشها برای ترکیب دادهها، بیشتر بر پایهی روشهای loose coupling یا اتصال سست بنا شده بود؛ در این روش، دادههای دوربین و IMU بهطور جداگانه پردازش میشدند و سپس خروجی آنها با هم ترکیب میشد. اگرچه این روش ساده بود، اما در برابر خطاهای انباشته مقاومتی نداشت و دقت مورد نیاز صنایع حساس مانند خودروسازی یا هوافضا را فراهم نمیکرد. به همین دلیل، محققان به سمت روشهای tightly coupled رفتند که در آن دادههای خام سنسورها مستقیماً در یک چارچوب بهینهسازی مشترک ادغام میشوند. این تحول یک جهش جدی در افزایش دقت و پایداری ناوبری محسوب میشود و اساس کار VINS-Mono نیز بر همین اصل است.
از منظر صنعتی، اهمیت این تحول دوچندان است. صنایع امروز دیگر به دنبال الگوریتمهای آزمایشگاهی نیستند، بلکه نیازمند سیستمهایی هستند که در شرایط واقعی، پایدار و مقیاسپذیر باشند. رباتهای خودران در انبارهای عظیم، خودروهای بدون راننده در خیابانهای شلوغ و پهپادهای بازرسی در خطوط انتقال انرژی همگی به راهکارهایی نیاز دارند که نهتنها خطاهای لحظهای را تصحیح کنند، بلکه در طولانیمدت از انباشت خطا جلوگیری کنند. اینجاست که VINS-Mono با ترکیب روشهای نوآورانهی خود مانند پیشیکپارچهسازی IMU (IMU Preintegration)، بهینهسازی اسلایدینگویندو و اصلاح حلقهای (Loop Closure) توانسته است یک راهکار کاملاً صنعتی ارائه دهد.
افزون بر این، یکی از نقاط قوت کلیدی VINS-Mono امکان ذخیرهسازی و بازاستفاده از نقشهها است. در بسیاری از کاربردهای صنعتی، رباتها بارها و بارها به محیطهای مشابه بازمیگردند؛ برای مثال، رباتهای حمل بار در یک انبار یا خودروهای خودران در یک مسیر مشخص. توانایی ذخیرهی نقشهی ساختهشده و استفادهی مجدد از آن، نهتنها زمان پردازش را کاهش میدهد، بلکه دقت ناوبری را در طول زمان افزایش داده و هزینههای عملیاتی را به شدت پایین میآورد. این ویژگی برای مقیاسپذیری فناوری در محیطهای صنعتی یک نقطهی عطف محسوب میشود.
در نهایت، باید تأکید کرد که توسعهی VINS-Mono تنها یک دستاورد دانشگاهی نیست، بلکه گامی استراتژیک به سمت صنعتیسازی رباتیک مقاوم است. این الگوریتم با موفقیت در آزمایشهای واقعی مانند پرواز پهپادها، ناوبری در محوطههای وسیع دانشگاهی، و حتی پیادهسازی بر روی گوشیهای هوشمند نشان داده است که میتواند در هر سطحی از سختافزار، از پلتفرمهای کوچک موبایلی تا رباتهای صنعتی پیشرفته، کارآمد و پایدار باشد. همین انعطافپذیری، VINS-Mono را به یک گزینهی جذاب برای صنایع تبدیل میکند که به دنبال راهکارهای کمهزینه اما مقاوم در برابر خطاهای سنسوری هستند.
چالشهای موجود در این مسیر
یکی از نخستین موانع بنیادین در توسعه و بهکارگیری رباتهای خودران، محدودیتهای ذاتی سنسورهایی است که برای تخمین حالت مورد استفاده قرار میگیرند. در سیستمهای مبتنی بر دوربین تکچشمی، بزرگترین چالش از همان لحظه آغاز کار یا مقداردهی اولیه (Initialization) شروع میشود. از آنجایی که دوربین تکچشمی توانایی اندازهگیری مستقیم مقیاس متریک را ندارد، بازسازی صحنه تنها به شکل نسبی انجام میشود و سیستم قادر به تخمین دقیق سرعت و شتاب واقعی نخواهد بود مگر آنکه با یک منبع دیگر همتراز شود. بسیاری از الگوریتمهای اولیه برای عبور از این گلوگاه نیازمند حرکات ابتدایی خاص یا شرایط ایستا بودند، در حالیکه در سناریوهای صنعتی واقعی چنین پیششرطهایی عملاً غیرممکن است. برای مثال، یک پهپاد که باید بلافاصله پس از روشنشدن پرواز کند یا یک ربات انبار که باید سریعاً وارد عملیات شود، نمیتواند منتظر مقداردهی اولیه طولانی یا کنترلشده بماند. این مسئله باعث شده است که Initialization مقاوم بهعنوان یک چالش جدی در سیستمهای ناوبری بصری–اینرسی شناخته شود.
چالش بعدی به مسئله رانش تجمعی (Drift) در طول مسیرهای حرکتی بازمیگردد. حتی زمانی که دادههای اینرسی به سیستم افزوده میشود و دقت کوتاهمدت افزایش مییابد، خطاهای کوچک در اندازهگیریها و بایاسهای ذاتی سنسور بهمرور زمان جمع شده و سبب انحراف چشمگیر در موقعیت و جهتگیری نهایی میشوند. این پدیده بهویژه در مسیرهای طولانی به وضوح خود را نشان میدهد؛ جایی که ربات بدون مکانیزم اصلاحکننده، بهتدریج از مسیر واقعی منحرف شده و در نهایت کل مأموریت را با شکست مواجه میسازد. در صنعت، این مسئله بهطور مستقیم بر ایمنی و بهرهوری تأثیر میگذارد؛ چرا که رباتی که دچار رانش شود میتواند با موانع برخورد کند، از محدودهی تعریفشده خارج شود یا عملیات زمانبر و پرهزینهای را مختل کند.
مسئلهی مهم دیگر به کیفیت دادههای خام سنسورها مربوط است. دادههای IMU، اگرچه پرسرعت و غنی هستند، اما همواره با نویز و رانش بایاس همراهاند. این خطاها در فرآیند انتگرالگیری دوگانه به سرعت رشد کرده و موجب بروز خطاهای قابلتوجه در موقعیت تخمینی میشوند. برای مقابله با این مشکل، نیاز به مکانیزمهای پیشپردازش و مدلسازی دقیق مانند پیشیکپارچهسازی IMU (IMU Preintegration) وجود دارد؛ اما حتی این راهکارها نیز تنها در صورتی کارآمد خواهند بود که بهصورت آنلاین بتوانند بایاسها را بازبینی و اصلاح کنند. در کنار این مسئله، همزمانی (Time Synchronization) میان دادههای دوربین و IMU و همچنین کالیبراسیون دقیق پارامترهای درونی و بیرونی سنسورها (Calibration) از اهمیت حیاتی برخوردار است. کوچکترین خطا در همزمانی یا کالیبراسیون میتواند الگوریتم را به سمت تخمینهای غلط هدایت کند. در عمل، بسیاری از پروژههای صنعتی به دلیل همین کاستیها در همگامسازی دادهها با چالشهای جدی مواجه شدهاند.
از جنبهی هندسی نیز، پایداری سیستم در شرایط خاص حرکتی بهشدت به چالش کشیده میشود. برای مثال، در صحنههایی با نور ضعیف، بافت یکنواخت یا در حضور تارشدگی حرکتی، ردیابی ویژگیها (Feature Tracking) با شکست مواجه میشود و سیستم قادر به استخراج اطلاعات کافی برای تخمین موقعیت نخواهد بود. همچنین، در حرکات چرخشی خالص یا مسیرهایی با پارالاکس بسیار کم، ساختار سهبعدی محیط بهدرستی بازسازی نمیشود و تخمین حالت دچار افت شدید دقت خواهد شد. این شرایط در بسیاری از محیطهای واقعی اجتنابناپذیر است، و بنابراین باید بهعنوان بخشی از چالشهای ذاتی در طراحی سیستمهای ناوبری مقاوم در نظر گرفته شوند.
در سطح مهندسی نیز محدودیتهای محاسباتی و اجرایی اهمیت ویژهای دارند. بسیاری از پلتفرمهای رباتیک یا پهپادهای صنعتی از سختافزارهای سبک و کممصرف استفاده میکنند که توان پردازشی محدودی دارند. از سوی دیگر، نیاز به خروجی بلادرنگ با نرخ بالا (گاهی تا صد هرتز برای سیستمهای کنترلی) فشار مضاعفی بر الگوریتمها وارد میکند. اگر سیستم نتواند پاسخ در زمان واقعی ارائه دهد، کل حلقهی کنترلی با شکست مواجه میشود. علاوه بر این، در محیطهای صنعتی پیچیده، نیاز به ذخیرهسازی و بازاستفاده از نقشهها یا حتی ادغام چند نقشهی مستقل وجود دارد. نبود چنین قابلیتی منجر به افزایش هزینهها و کاهش بهرهوری در عملیاتهای تکراری خواهد شد.
در مجموع، چالشهای موجود در مسیر توسعهی سیستمهای ناوبری بصری–اینرسی تکچشمی را میتوان در سه دستهی اصلی خلاصه کرد: نخست، چالشهای هندسی و مشاهدهپذیری که به ضعف ذاتی دوربین تکچشمی و شرایط محیطی بازمیگردد؛ دوم، چالشهای سنسوری و مدلسازی که از محدودیتهای IMU و مسائل کالیبراسیون ناشی میشود؛ و سوم، چالشهای مهندسی و اجرایی که به محدودیت توان پردازشی و نیاز به عملکرد پایدار در شرایط واقعی مربوط است. هر راهکار صنعتی موفق باید بهطور همزمان در هر سه جبهه پیشرفت داشته باشد تا بتواند اعتماد صنایع را برای پیادهسازی در مقیاس وسیع جلب کند.
دیدگاه نوآورانه مقاله
مقالهی VINS-Mono با یک نگاه بنیادین و متفاوت به مسئلهی ناوبری رباتهای خودران وارد میشود و تلاش میکند محدودیتهای تاریخی سیستمهای بصری–اینرسی را برطرف کند. نوآوری این مقاله صرفاً در معرفی یک الگوریتم جدید خلاصه نمیشود، بلکه در طراحی یک چارچوب جامع، مقاوم و مقیاسپذیر است که میتواند بهطور مستقیم در سناریوهای صنعتی به کار گرفته شود. هدف اصلی آن، ایجاد یک تخمین حالت پایدار و دقیق تنها با استفاده از کمترین سختافزار ممکن – یعنی یک دوربین تکچشمی و یک IMU ارزانقیمت – است؛ چیزی که در نگاه اول ساده به نظر میرسد، اما در عمل نیازمند مجموعهای از نوآوریهای عمیق در سطح الگوریتم و معماری سیستم است.
یکی از برجستهترین نوآوریهای VINS-Mono در فرآیند Initialization مقاوم آن نهفته است. برخلاف بسیاری از روشهای قبلی که به یک حرکت کنترلشده، ایستایی اولیه یا دادههای خارجی برای شروع نیاز داشتند، این الگوریتم میتواند حتی از یک حالت اولیهی نامشخص آغاز به کار کند. مقاله با تلفیق تکنیکهای «بازسازی ساختار سهبعدی از حرکت» (Structure from Motion) با دادههای اینرسی، یک مکانیزم انعطافپذیر ارائه میدهد که قادر است مقیاس متریک، بایاس ژیروسکوپ و وضعیت کلی سیستم را همزمان تخمین بزند. این نوآوری بهطور مستقیم مانع از فروپاشی سیستم در شرایط واقعی میشود، جایی که امکان فراهمکردن شرایط ایدهآل برای مقداردهی اولیه وجود ندارد.
نوآوری دوم در بهینهسازی tightly-coupled یا همبستهی دادههای دوربین و IMU است. در بسیاری از روشهای مرسوم، ابتدا دادههای هر سنسور بهصورت جداگانه پردازش شده و سپس در سطحی بالاتر ادغام میشوند. این رویکرد هرچند سادهتر است، اما بهطور اجتنابناپذیر خطاها را بزرگتر کرده و دقت کلی را کاهش میدهد. در مقابل، VINS-Mono دادههای خام دو سنسور را بهطور مستقیم و همزمان وارد یک چارچوب بهینهسازی غیرخطی میکند. این کار باعث میشود که اطلاعات مکمل هر سنسور از همان ابتدا در فرآیند تخمین لحاظ شود و الگوریتم بتواند در برابر نویزها و خطاهای سنسوری مقاومتر عمل کند. بهعلاوه، با استفاده از بهینهسازی لغزان (Sliding Window Optimization)، سیستم میتواند بهصورت بلادرنگ کار کرده و همزمان دقت بالای تخمین را حفظ کند.
نوآوری سوم مقاله، توجه ویژه به مسئلهی Loop Closure و Relocalization است. همانطور که پیشتر اشاره شد، رانش تجمعی یکی از بزرگترین مشکلات سیستمهای بصری–اینرسی است. VINS-Mono با ادغام یک ماژول تشخیص حلقه مبتنی بر بانک کلمات بصری (Bag-of-Words) و توصیفگرهای BRIEF، قادر است محیطهای بازدیدشده را دوباره شناسایی کرده و موقعیت ربات را با نقشهی پیشین همتراز کند. این مکانیزم نهتنها خطاهای رانشی را اصلاح میکند، بلکه امکان بازبینی و بازیابی موقعیت (Relocalization) را نیز فراهم میسازد. در نتیجه، اگر ربات در اثر نویز یا از دست دادن ردیابی دچار خطا شود، سیستم قادر است دوباره به نقشهی موجود متصل شود و عملیات را بدون فروپاشی ادامه دهد.
چهارمین نوآوری کلیدی، بهینهسازی گرافی در سطح سراسری (Global Pose Graph Optimization) است. برخلاف بسیاری از الگوریتمها که صرفاً به قیدهای محلی تکیه میکنند، VINS-Mono یک گراف چهار درجه آزادی شامل موقعیتهای x، y، z و زاویهی yaw میسازد که هم قیدهای ترتیبی (odometry) و هم قیدهای حلقهای (loop closure) را ترکیب میکند. این ساختار گرافی باعث میشود خطاهای تجمعی در مقیاسهای بزرگ بهطور مؤثر حذف شوند و نقشهی نهایی انسجام بیشتری داشته باشد. برای صنایع، این ویژگی به معنای توانایی استفاده از سیستم در مأموریتهای طولانی و پیچیده بدون نگرانی از رانشهای غیرقابل کنترل است.
در نهایت، نوآوری VINS-Mono تنها به سطح الگوریتم محدود نمیشود، بلکه در بُعد کاربردی و اجرایی نیز برجسته است. این سیستم بهگونهای طراحی شده که قابلیت پیادهسازی روی دستگاههای سبک مانند تلفنهای هوشمند را دارد و در عین حال، عملکرد خود را در محیطهای صنعتی بزرگ نیز حفظ میکند. چنین انعطافپذیریای بسیار ارزشمند است؛ چرا که صنایع مختلف میتوانند بسته به نیاز خود، همان الگوریتم را در پلتفرمهای متفاوت از پهپادهای سبکوزن تا خودروهای خودران پرقدرت اجرا کنند.
به این ترتیب، دیدگاه نوآورانهی مقاله در چهار محور اصلی خلاصه میشود: Initialization مقاوم، بهینهسازی tightly-coupled، مکانیزمهای Loop Closure و Relocalization، و بهینهسازی گرافی سراسری. این ترکیب منحصربهفرد نهتنها به لحاظ علمی یک پیشرفت چشمگیر محسوب میشود، بلکه در سطح صنعتی نیز یک چارچوب آماده برای پیادهسازی واقعی و مقیاسپذیر ارائه میدهد.
روش پیشنهادی مقاله (گامبهگام)
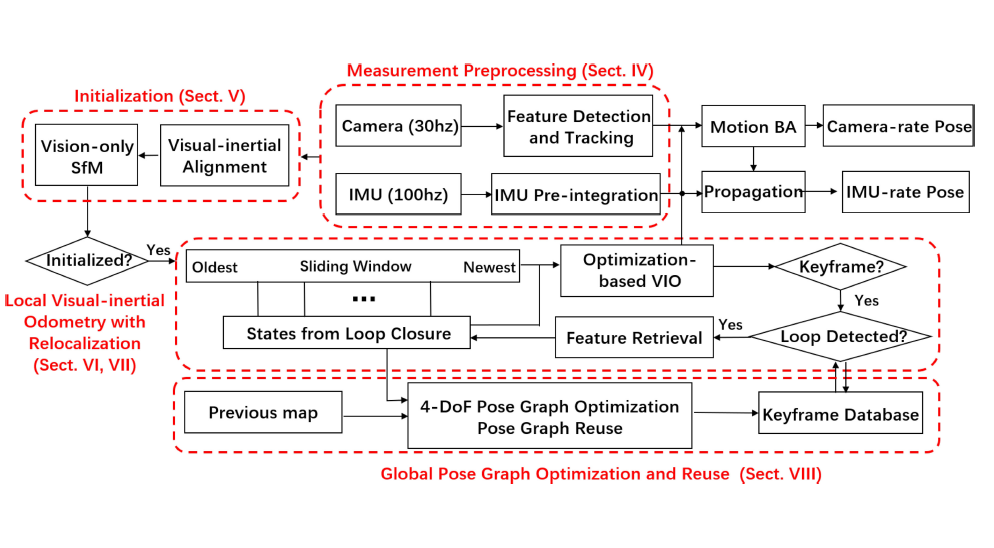
روش پیشنهادی VINS-Mono را میتوان بهعنوان یک زنجیرهی پردازشی دقیق و چندلایه در نظر گرفت که هر مرحلهی آن بهطور خاص برای حل یکی از چالشهای بنیادین سیستمهای بصری–اینرسی طراحی شده است. این زنجیره از لحظهی ورود دادههای خام سنسورها آغاز میشود و تا تولید یک نقشهی دقیق و بهینهشده در مقیاس جهانی ادامه پیدا میکند. مزیت اصلی این چارچوب در آن است که تمامی مراحل نه بهصورت منفصل، بلکه بهطور همبسته طراحی شدهاند؛ بهطوری که خروجی هر بخش بهصورت مستقیم به پایداری و دقت بخش بعدی کمک میکند. در ادامه، هر یک از پنج گام اصلی این روش با جزئیات بیشتر توضیح داده میشود.
گام اول: پیشپردازش دادههای سنسورها
اولین قدم در معماری VINS-Mono بهنوعی زیربنای کل سیستم محسوب میشود، زیرا کیفیت پردازش اولیه دادهها تعیینکنندهی میزان موفقیت مراحل بعدی است. در بخش تصویری، الگوریتم بهجای استفاده از روشهای سنگین و پرهزینه مانند استخراج همهی ویژگیها در هر فریم، از یک رویکرد هوشمندانه بهره میبرد که مبتنی بر ردیابی ویژگیها در طول زمان است. به کمک الگوریتم KLT، نقاط شاخص تصویر شناسایی و سپس در فریمهای بعدی دنبال میشوند. این کار باعث میشود الگوریتم تنها زمانی ویژگیهای جدید را اضافه کند که تعداد نقاط قابل ردیابی کاهش یابد و در نتیجه هم محاسبات کاهش پیدا کند و هم پایداری ردیابی افزایش یابد. در بخش اینرسی نیز دادههای IMU که معمولاً با نرخ بسیار بالا ثبت میشوند، بهوسیلهی روش «پیشیکپارچهسازی» فشردهسازی میگردند. این روش، تمامی تغییرات سرعت و زاویه بین دو فریم دوربین را به شکل یک بستهی ریاضی خلاصه میکند، بهگونهای که نهتنها هزینهی محاسباتی کاهش مییابد، بلکه امکان اصلاح خطاهای بایاس در مراحل بعدی نیز فراهم میشود. اهمیت این گام در آن است که بهینهسازی غیرخطی در مراحل بعدی بدون چنین پیشپردازشی عملاً غیرممکن خواهد بود، زیرا حجم دادهها و پیچیدگی محاسبات از توان سیستمهای تعبیهشده فراتر میرفت.
گام دوم: Initialization ترکیبی و خودکار
در بسیاری از الگوریتمهای قبلی، مقداردهی اولیه بهعنوان یک مانع جدی شناخته میشد که بدون شرایط خاص قابل اجرا نبود. برای مثال، سیستم باید در حالت ایستا یا با حرکات کنترلشده شروع به کار میکرد تا بتواند مقیاس متریک را تخمین بزند. VINS-Mono این محدودیت را برطرف کرده و فرآیند Initialization را بهگونهای طراحی کرده است که حتی از یک حالت نامعلوم نیز امکان آغاز به کار داشته باشد. در این مرحله ابتدا از دادههای بینایی برای بازسازی ساختار سهبعدی نسبی محیط استفاده میشود، فرآیندی که با نام Structure from Motion شناخته میشود. این بازسازی اگرچه فاقد مقیاس واقعی است، اما یک چارچوب نسبی دقیق فراهم میکند. سپس دادههای IMU بهعنوان مرجع وارد عمل شده و مقیاس متریک و جهتگیری واقعی را به این چارچوب اضافه میکنند. علاوه بر این، بایاس ژیروسکوپ نیز در همین مرحله تخمین زده و اصلاح میشود، بهگونهای که خطاهای اولیه در سریعترین زمان ممکن خنثی شوند. مزیت این فرآیند در آن است که ربات میتواند بدون هیچ تأخیری عملیات خود را آغاز کند، ویژگیای که برای کاربردهای صنعتی با نیاز به راهاندازی سریع یک الزام حیاتی محسوب میشود.
گام سوم: بهینهسازی غیرخطی در پنجرهی لغزان (Sliding Window Optimization)
هنگامی که مقداردهی اولیه انجام شد، نوبت به مرحلهای میرسد که قلب تپندهی الگوریتم محسوب میشود. در این بخش، تخمین حالت بهصورت همزمان برای موقعیت، سرعت، جهتگیری و پارامترهای بایاس سنسور انجام میشود. نکتهی کلیدی در طراحی این بخش استفاده از یک پنجرهی لغزان است. این بدان معناست که بهجای نگهداری و پردازش تمام دادههای گذشته، تنها یک بازهی زمانی محدود از مشاهدات اخیر وارد فرآیند بهینهسازی میشود و با ورود دادههای جدید، دادههای قدیمیتر از پنجره خارج میشوند. این طراحی هوشمندانه دو مزیت اساسی دارد: نخست آنکه حجم محاسبات همواره ثابت باقی میماند و سیستم میتواند در شرایط بلادرنگ کار کند؛ دوم آنکه تمرکز بر دادههای اخیر باعث میشود خطاهای لحظهای بهسرعت اصلاح شوند. از سوی دیگر، در این بهینهسازی غیرخطی، دادههای دوربین و IMU بهطور tightly-coupled با هم ترکیب میشوند، به این معنا که هر دو منبع داده مستقیماً در تابع هزینه مشترک وارد میشوند. این امر سبب میشود که اطلاعات مکمل هر سنسور از همان ابتدا در تخمین لحاظ شود و در نتیجه مقاومت سیستم در برابر خطاهای سنسوری بهطور چشمگیری افزایش یابد.
گام چهارم: مکانیزم Relocalization و بازبینی مسیر
یکی از بخشهای حیاتی و تعیینکننده در VINS-Mono ماژول Relocalization است که وظیفهی بازبینی و اصلاح موقعیت را بر عهده دارد. در این مرحله، الگوریتم بهطور مداوم محیط فعلی را با پایگاه دادهای از تصاویر قبلی مقایسه میکند. اگر محیطی مشابه با محیطهای بازدیدشده در گذشته تشخیص داده شود، سیستم میتواند خود را با نقشهی موجود همتراز کند و خطاهای رانشی را اصلاح نماید. این فرآیند مبتنی بر تکنیک Loop Closure است که با استفاده از روش Bag-of-Words و توصیفگرهای BRIEF پیادهسازی شده است. اهمیت این مکانیزم زمانی آشکار میشود که ربات در اثر خطا یا از دست دادن ردیابی مسیر واقعی خود را گم کرده باشد؛ در چنین شرایطی، Relocalization نقش یک «سیستم بازیابی» را ایفا میکند و اجازه نمیدهد کل عملیات مختل شود. برای کاربردهای صنعتی، این قابلیت یک مزیت استراتژیک محسوب میشود، زیرا در محیطهای بزرگ و پیچیده مانند معادن یا کارخانهها امکان بروز خطا اجتنابناپذیر است و بدون مکانیزمی برای بازبینی، سیستم بهسرعت از کار خواهد افتاد.
گام پنجم: بهینهسازی گرافی سراسری (Global Pose Graph Optimization)
آخرین گام در روش پیشنهادی VINS-Mono به اصلاح نهایی نقشه و مسیر اختصاص دارد. در این مرحله، تمامی تخمینهای محلی که در مراحل قبلی به دست آمدهاند در یک گراف چهار درجه آزادی ادغام میشوند. این گراف شامل مختصات مکانی x، y، z و زاویهی yaw است، در حالی که رول و پیچ بهدلیل تثبیت توسط گرانش بدون تغییر باقی میمانند. گراف مذکور هم قیدهای ترتیبی ناشی از ادیومتری و هم قیدهای حلقهای ناشی از Relocalization را ترکیب میکند و سپس با یک بهینهسازی سراسری، خطاهای تجمعی در کل مسیر اصلاح میشوند. خروجی این مرحله یک نقشهی منسجم و دقیق است که میتواند در مقیاسهای بزرگ نیز مورد اعتماد باشد. این ویژگی برای صنایع بسیار مهم است، چرا که عملیاتهای طولانیمدت مانند ناوبری چند کیلومتری یا مأموریتهای روزانه در محیطهای بزرگ تنها زمانی قابل اتکا خواهند بود که خطاهای رانشی بهطور کامل حذف شوند. در نتیجه، این مرحله تضمین میکند که سیستم نهتنها در لحظه، بلکه در بلندمدت نیز پایدار و دقیق باقی بماند.
در مجموع، روش پیشنهادی VINS-Mono را میتوان یک زنجیرهی پنجمرحلهای دانست که از پیشپردازش هوشمندانه آغاز شده، با مقداردهی اولیه مقاوم ادامه پیدا میکند، از طریق بهینهسازی غیرخطی در پنجرهی لغزان پایداری لحظهای را تضمین میکند، با مکانیزم Relocalization توانایی بازیابی موقعیت را به سیستم میافزاید و در نهایت با بهینهسازی گرافی سراسری خطاهای بلندمدت را از بین میبرد. این طراحی یکپارچه و چندلایه همان چیزی است که VINS-Mono را از سایر الگوریتمهای مشابه متمایز میسازد و آن را به یک راهکار صنعتی واقعی برای مقاومسازی رباتهای خودران تبدیل میکند.
پیادهسازی و ارزیابی عملکرد
یکی از نقاط تمایز VINS-Mono نسبت به بسیاری از الگوریتمهای دیگر در این است که نویسندگان آن نهتنها به طراحی تئوریک بسنده نکردهاند، بلکه پیادهسازی عملی و آزمایشهای متنوعی را در شرایط گوناگون انجام دادهاند تا پایداری، دقت و کارایی این سیستم را بهطور جامع ارزیابی کنند. این رویکرد باعث میشود مقاله از یک دستاورد صرفاً دانشگاهی فراتر رفته و به یک راهکار قابلاتکا برای صنعت تبدیل شود. در این بخش، ارزیابیهای انجامشده از منظر آزمایشگاهی، میدانی، محاسباتی و کاربردی بررسی میشود تا تصویر کاملی از تواناییهای این الگوریتم ارائه گردد.
نخستین مجموعهی آزمایشها بر روی دیتاست مرجع EuRoC MAV انجام شد. این دیتاست شامل پرواز یک پهپاد کوچک در محیطهای داخلی با شرایطی پیچیده مانند تغییرات شدید نور، مسیرهای باریک، حضور موانع متعدد و حرکات پرشتاب است. EuRoC از جمله معیارهای استاندارد جهانی است که بهطور گسترده برای مقایسهی الگوریتمهای ناوبری بصری–اینرسی به کار میرود. VINS-Mono در این آزمایشها عملکردی درخشان از خود نشان داد. خطای میانگین مطلق مسیر (Absolute Trajectory Error) در بیشتر سناریوها بهطور قابل ملاحظهای کمتر از رقبا بود. در مواردی که الگوریتمهای مرسوم مانند OKVIS یا ROVIO دچار رانش و انحراف شدید میشدند، VINS-Mono توانست با حفظ انسجام در مسیر، خطاهای بلندمدت را حذف کند. این نتایج نشان میدهد که سیستم نهتنها در شرایط ساده، بلکه در محیطهای پرچالش داخلی نیز دقت بالایی دارد.
پس از موفقیت در محیطهای کنترلشده، تیم پژوهشی الگوریتم را در شرایط واقعی و مقیاسهای بسیار بزرگ آزمایش کرد. یکی از برجستهترین این آزمایشها در دانشگاه HKUST انجام شد؛ مسیری به طول ۵٫۶ کیلومتر بدون استفاده از GPS توسط الگوریتم پیموده شد. اهمیت این آزمایش در آن است که رانش تجمعی در چنین مسیرهای طولانی بهطور معمول غیرقابل اجتناب است و بسیاری از سیستمهای موجود در میانهی مسیر بهطور کامل از کار میافتند. با این حال، VINS-Mono توانست نقشهی مسیر را بازسازی کرده و آن را با نقشهی مرجع Google Earth تقریباً بهطور کامل منطبق سازد. رانش نهایی به حدی ناچیز بود که از دید صنعتی میتوان آن را صفر در نظر گرفت. این نتیجه نشان میدهد الگوریتم قابلیت کار در مأموریتهای عملیاتی طولانی و واقعی را دارد؛ قابلیتی که برای ناوبری خودروهای خودران در مسیرهای شهری یا حرکت رباتهای صنعتی در انبارهای بزرگ حیاتی است.
علاوه بر دقت، مقاله بر روی کارایی محاسباتی و قابلیت اجرای بلادرنگ تمرکز ویژهای داشته است. بسیاری از الگوریتمهای مشابه برای دستیابی به دقت بالا نیازمند سختافزارهای قدرتمند و پرمصرف هستند که استفاده از آنها در صنایع هزینهبر و غیرعملی است. VINS-Mono با طراحی سبک و بهینهی خود این محدودیت را پشت سر گذاشته است. الگوریتم بهگونهای توسعه داده شده که بتواند حتی روی پلتفرمهای تعبیهشده با منابع محدود اجرا شود. برای نمایش این موضوع، پیادهسازی بر روی دستگاههای iOS انجام گرفت. در این آزمایش، الگوریتم روی یک تلفن همراه اجرا شد و توانست تخمین حالت پایدار و بلادرنگ ارائه دهد. چنین قابلیتی نشاندهندهی انعطافپذیری بینظیر سیستم است؛ از یک سو میتواند روی گوشیهای هوشمند برای کاربردهای واقعیت افزوده اجرا شود، و از سوی دیگر در رباتها و خودروهای خودران صنعتی برای مأموریتهای پیچیده به کار گرفته شود.
یکی دیگر از جنبههای مهم ارزیابی، پایداری سیستم در پروازهای خودکار پهپادها بود. در این آزمایشها، VINS-Mono توانست مسیرهای از پیش تعیینشده را با دقت بالا طی کند و خطای نهایی کمتر از ۰٫۳ درصد گزارش شد. چنین سطحی از دقت برای کاربردهایی مانند بازرسی زیرساختها یا مأموریتهای حساس صنعتی فوقالعاده ارزشمند است. توانایی پرواز در مسیرهای پیچیده بدون انحراف محسوس، نشاندهندهی آن است که الگوریتم نهتنها در سطح تحقیقاتی، بلکه در مأموریتهای عملیاتی نیز کاملاً قابل اتکاست.
افزون بر این، قابلیت ذخیرهسازی و بارگذاری مجدد نقشهها نیز در آزمایشها مورد توجه قرار گرفت. در بسیاری از محیطهای صنعتی، رباتها بارها و بارها به مکانهای مشابه بازمیگردند. بهجای بازسازی کامل نقشه در هر بار، VINS-Mono امکان استفادهی مجدد از نقشههای گذشته را فراهم میکند. این ویژگی نهتنها باعث صرفهجویی در زمان و انرژی میشود، بلکه دقت ناوبری را نیز در طولانیمدت افزایش میدهد، چرا که سیستم با یک پایگاه دادهی غنیتر وارد عملیات میشود. این قابلیت برای صنایع لجستیک، انبارداری و تولید به معنای کاهش هزینههای عملیاتی و افزایش بهرهوری است.
در جمعبندی میتوان گفت که ارزیابیهای مقاله در چهار محور کلیدی پیام روشنی دارد: دقت بالا در دیتاستهای مرجع، پایداری در مسیرهای بزرگمقیاس، قابلیت اجرا در بلادرنگ روی سختافزارهای سبک و توانایی ذخیره و بازبینی نقشهها. این ترکیب منحصربهفرد سبب میشود VINS-Mono یک الگوریتم آزمایشگاهی صرف نباشد، بلکه بهعنوان یک ماژول صنعتی آمادهی بهرهبرداری شناخته شود. چنین دستاوردی میتواند پایهای برای تحول در رباتهای خودران، خودروهای هوشمند و پهپادهای صنعتی باشد و مسیر صنعت را به سمت سیستمهای مقاومتر و کمهزینهتر هموار سازد.
کاربرد صنعتی در سناریوهای واقعی
الگوریتم VINS-Mono از همان ابتدا بهعنوان یک راهکار کاربردی و قابلاجرا در محیطهای صنعتی توسعه داده شده است. برخلاف بسیاری از دستاوردهای تحقیقاتی که محدود به آزمایشگاه یا شرایط کنترلشده باقی میمانند، این سیستم توانسته است به سرعت در سناریوهای واقعی و عملیاتی جایگاه پیدا کند. مهمترین ویژگی این الگوریتم، قابلیت پیادهسازی آن تنها با استفاده از سختافزارهای ساده و ارزان مانند یک دوربین تکچشمی و یک IMU کوچک است، در حالی که بسیاری از سیستمهای مشابه نیازمند تجهیزات سنگین و پرهزینه نظیر لیدار یا دوربینهای چندگانه هستند. این موضوع باعث میشود VINS-Mono نهتنها برای شرکتهای بزرگ و پروژههای عظیم، بلکه برای استارتاپها و صنایع کوچک و متوسط نیز جذاب و مقرونبهصرفه باشد. از سوی دیگر، ماهیت مقاوم این الگوریتم در برابر خطاهای سنسوری و توانایی اصلاح رانش تجمعی موجب شده است که بتواند در محیطهای پرچالش صنعتی با اطمینان کامل مورد استفاده قرار گیرد. در ادامه، به تفصیل چهار سناریوی شاخص صنعتی بررسی میشود.
سناریوی اول: رباتهای انبار هوشمند و لجستیک
در سالهای اخیر، انبارهای بزرگ و مراکز توزیع کالا به سرعت به سمت اتوماسیون کامل حرکت کردهاند. در این محیطها، صدها ربات خودران بهطور همزمان مشغول جابهجایی کالا، چیدمان قفسهها و آمادهسازی سفارشها هستند. از آنجا که چنین فضاهایی معمولاً سرپوشیدهاند و پوشش GPS بسیار ضعیف یا کاملاً غیرفعال است، اتکا به سیستمهای سنتی ناوبری امکانپذیر نیست. از سوی دیگر، استفاده از سختافزارهای گرانقیمت مانند لیدار در مقیاس انبوه هزینههای سرمایهگذاری و نگهداری را بهطور چشمگیری افزایش میدهد. در این میان، VINS-Mono با استفاده از یک دوربین ساده و یک IMU کوچک، قادر است نقشهای دقیق از محیط ایجاد کرده و موقعیت رباتها را بهطور مداوم با دقت بالا تخمین بزند. مکانیزم اصلاح رانش این سیستم باعث میشود که حتی در مسیرهای طولانی و پرپیچوخم نیز انحرافی رخ ندهد. نتیجهی این قابلیت آن است که عملیات لجستیک با سرعت و دقت بیشتری انجام میشود، احتمال برخورد یا خطا به حداقل میرسد و بهرهوری کلی زنجیرهی تأمین افزایش پیدا میکند. در یک نگاه کلان، استفاده از چنین فناوریای میتواند نقش تعیینکنندهای در رقابتپذیری شرکتهای فعال در حوزهی تجارت الکترونیک و توزیع کالا داشته باشد.
سناریوی دوم: رباتهای معدنی و عملیات زیرزمینی
معدنکاری و عملیات زیرزمینی از جمله دشوارترین محیطها برای پیادهسازی رباتهای خودران محسوب میشوند. وجود گردوغبار، تغییرات ناگهانی شرایط نوری، مسیرهای باریک و نامنظم و نبود کامل سیگنالهای ارتباطی، محیطی بسیار چالشبرانگیز برای ناوبری ایجاد میکند. روشهای سنتی مانند GPS در چنین مکانهایی عملاً بلااستفادهاند و استفاده از لیدار یا تجهیزات مشابه نیز به دلیل شرایط سخت محیطی و هزینهی بالا همواره با مشکل روبهرو است. VINS-Mono در این محیطها ارزش واقعی خود را نشان میدهد. این سیستم با ترکیب دادههای دوربین و IMU میتواند حتی در تونلهای تاریک و پر از گردوغبار مسیر ربات را با دقت بالا بازسازی کند. مکانیزم Relocalization این الگوریتم یک مزیت کلیدی به شمار میرود، چرا که در عملیات معدنی احتمال از دست دادن ردیابی بسیار بالاست؛ اما VINS-Mono قادر است پس از وقوع چنین خطایی، موقعیت خود را با نقشهی قبلی بازیابی کرده و عملیات را بدون توقف ادامه دهد. برای صنایع معدنی، این قابلیت به معنای افزایش ایمنی، کاهش نیاز به نیروی انسانی در شرایط خطرناک، و کاهش هزینههای عملیاتی است. از دید کلان، چنین فناوریای میتواند مسیر اتوماسیون کامل در معادن را هموار سازد.
سناریوی سوم: خودروهای خودران و حملونقل هوشمند
یکی از مهمترین حوزههای صنعتی که به فناوریهای ناوبری مقاوم نیاز دارد، صنعت حملونقل هوشمند و خودروهای خودران است. در محیطهای شهری، سیگنالهای GPS اغلب دچار اختلال میشوند؛ ساختمانهای بلند، تونلها و پلها شرایطی ایجاد میکنند که موقعیتیابی مبتنی بر GPS یا غیرقابل اعتماد است یا خطای چندمتری دارد. برای یک خودرو خودران، چنین خطاهایی میتواند به حوادث جدی و حتی تهدید جان مسافران منجر شود. در این شرایط، VINS-Mono بهعنوان یک جایگزین یا مکمل ایدهآل GPS مطرح میشود. این الگوریتم قادر است با ترکیب دادههای بینایی و اینرسی، موقعیت و جهتگیری خودرو را با دقت بالا در زمان واقعی تخمین بزند و از انحراف مسیر جلوگیری کند. مکانیزم اصلاح رانش و بهینهسازی گرافی سراسری آن موجب میشود که خودرو حتی در مسیرهای طولانی بدون اتکا به GPS نیز بتواند عملکردی ایمن و پایدار داشته باشد. این ویژگی برای صنعت حملونقل هوشمند یک مزیت رقابتی بزرگ محسوب میشود و میتواند اعتماد عمومی را به استفاده از خودروهای خودران افزایش دهد. از منظر اقتصادی نیز، کاهش وابستگی به تجهیزات سنگین و زیرساختهای خارجی موجب کاهش هزینهها و تسهیل توسعهی انبوه خودروهای هوشمند خواهد شد.
سناریوی چهارم: پهپادهای صنعتی برای بازرسی و پایش زیرساختها
پهپادها در سالهای اخیر به یکی از ابزارهای اصلی صنایع مختلف برای پایش و بازرسی زیرساختها تبدیل شدهاند. خطوط انتقال نیرو، دکلهای مخابراتی، سدها، سکوهای نفتی و خطوط لوله تنها بخشی از زیرساختهایی هستند که نیازمند پایش مداوم و دقیق هستند. این مأموریتها معمولاً در فواصل طولانی و محیطهای پرخطر انجام میشوند و دقت ناوبری در آنها از اهمیت حیاتی برخوردار است. کوچکترین خطا یا رانش در مسیر میتواند باعث برخورد پهپاد با تجهیزات حساس یا حتی سقوط آن شود. VINS-Mono با قابلیت اصلاح خطاهای تجمعی و تولید نقشههای منسجم، امکان پروازهای طولانی و ایمن را فراهم میکند. علاوه بر این، قابلیت ذخیره و بازاستفاده از نقشهها به پهپاد اجازه میدهد در مأموریتهای دورهای از نقشهی موجود استفاده کند و تنها تغییرات جدید را ثبت نماید. این قابلیت موجب صرفهجویی چشمگیر در زمان و انرژی میشود و هزینههای عملیاتی را کاهش میدهد. از دید کلان، این فناوری میتواند نقش کلیدی در نگهداری پیشگیرانه (Predictive Maintenance) ایفا کند و عمر مفید زیرساختها را افزایش دهد.
در مجموع، کاربردهای صنعتی VINS-Mono نشان میدهند که این الگوریتم نه یک فناوری آزمایشگاهی محدود، بلکه یک راهکار عملی و چندوجهی است که میتواند نیازهای صنایع متنوعی را برآورده کند. ویژگی مشترک تمامی سناریوها، نیاز به دقت بالا، پایداری در بلندمدت و مقرونبهصرفه بودن است، و VINS-Mono دقیقاً در همین سه محور برتری خود را ثابت کرده است. این سیستم میتواند بهعنوان یک ماژول استاندارد در آیندهی رباتیک و اتوماسیون شناخته شود و مسیر حرکت به سمت صنعت ۴.۰ و تحول دیجیتال را تسریع نماید.
جمعبندی نهایی
الگوریتم VINS-Mono را باید نه یک پروژهی تحقیقاتی، بلکه یک فناوری تحولآفرین برای آیندهی رباتیک و سیستمهای خودران دانست. این سیستم با ترکیب سادهترین سنسورها و طراحی هوشمندانه، نشان داد که برای دستیابی به دقت بالا، پایداری بلندمدت و قابلیت اجرایی در شرایط واقعی، لزوماً به سختافزارهای پیچیده و میلیون دلاری نیازی نیست. VINS-Mono در حقیقت نقطهی تلاقی بین پژوهشهای علمی و نیازهای واقعی صنعت است؛ جایی که علم صرفاً در مقالات باقی نمیماند، بلکه به شکل یک ابزار آمادهی بهرهبرداری وارد زنجیرهی ارزش صنایع میشود.
این الگوریتم سه مانع اساسی را از سر راه صنعت برداشته است: نخست، وابستگی خطرناک به GPS که در بسیاری از محیطهای واقعی مانند شهرهای پرجمعیت، تونلها و معادن بهطور کامل بیاثر میشود. دوم، مشکل رانش تجمعی که در مسیرهای طولانی باعث میشود سیستمهای ناوبری پس از مدتی عملاً غیرقابل اعتماد شوند. و سوم، هزینههای سنگین تجهیزات حجیم مانند لیدار که توسعهی گستردهی رباتیک و خودروهای خودران را برای بسیاری از سازمانها غیرممکن میسازد. VINS-Mono پاسخی مستقیم و کاربردی به هر سه چالش است؛ یک سیستم سبک، مقاوم، دقیق و در عین حال مقرونبهصرفه که میتواند بهراحتی در سناریوهای صنعتی واقعی پیادهسازی شود.
برای مدیران لجستیک، VINS-Mono راهکاری است برای افزایش سرعت پردازش سفارشها، کاهش خطاهای عملیاتی و بهبود بازدهی کلی زنجیرهی تأمین. برای شرکتهای معدنی، این فناوری یک سپر ایمنی است که امکان اعزام رباتها به محیطهای خطرناک زیرزمینی را فراهم میآورد بدون آنکه نیازی به حضور نیروی انسانی در شرایط پرریسک باشد. برای خودروسازان و توسعهدهندگان خودروهای خودران، این الگوریتم یک بخش کلیدی از پازل ایمنی شهری است که میتواند اعتماد مسافران و تنظیمگران بازار را جلب کند. و برای صنایع انرژی و زیرساخت، VINS-Mono ابزاری حیاتی برای پایش و نگهداری هوشمند زیرساختهاست که موجب کاهش هزینههای نگهداری و افزایش طول عمر تجهیزات خواهد شد.
اکنون پرسش اصلی این است: شما کجای این مسیر ایستادهاید؟
آیا شرکت شما همچنان به دنبال روشهای سنتی و پرهزینهی ناوبری است که در شرایط واقعی بارها ناکام ماندهاند؟ یا آمادهاید که گامی استراتژیک بردارید و با پذیرش VINS-Mono به صف پیشروان صنعت ۴.۰ بپیوندید؟ تصمیمی که امروز گرفته میشود میتواند آیندهی چند دههی بعد را رقم بزند. بازار جهانی بهسرعت در حال حرکت به سمت دیجیتالیسازی و اتوماسیون کامل است و تنها سازمانهایی که زودتر این فناوریها را به ساختار خود وارد کنند، میتوانند مزیت رقابتی پایدار بسازند.
دعوت ما روشن و بیپرده است: اکنون زمان اقدام است.
مدیران پروژه، رهبران صنعتی و تصمیمگیران ارشد باید با جسارت مسیر آینده را انتخاب کنند. VINS-Mono آماده است تا بهعنوان یک ماژول استاندارد در پروژههای شما ادغام شود. چه در قالب توسعهی خودروهای هوشمند، چه در رباتهای انبار، چه در پهپادهای صنعتی و چه در رباتهای معدنی، این فناوری قابلیت آن را دارد که قلب سیستمهای ناوبری شما شود و پایهای مطمئن برای تحول دیجیتال فراهم کند.
اگر شما نیز میخواهید بخشی از آیندهی صنعت هوشمند باشید، امروز بهترین زمان برای آغاز است. فردا ممکن است دیر باشد و فرصتها توسط رقبا تصاحب شوند. با VINS-Mono میتوانید سازمان خود را یک گام جلوتر از رقبا نگه دارید، عملیات خود را پایدارتر کنید و مسیر ورود به عصر جدید اتوماسیون و رباتیک را هموار سازید.



{kind=link}
بدون نظر