

رباتهای خودران در محیطهای بدون GPS: انقلاب لیزر سهبعدی در ناوبری صنعتی
در دنیای امروز که صنایع بزرگ با فشار روزافزون برای افزایش بهرهوری، کاهش هزینهها و تضمین ایمنی عملیات مواجه هستند، رباتهای خودران بهعنوان یکی از کلیدیترین فناوریهای تحولآفرین شناخته میشوند. تصور کنید یک محوطهی عظیم صنعتی مانند کارخانه فولاد، پالایشگاه یا ترمینال بندری را که هر روز هزاران تُن مواد اولیه و محصول در آن جابهجا میشود؛ در چنین محیطی حضور ماشینآلات سنگین، مسیرهای نامنظم، موانع غیرقابلپیشبینی و حتی تداخلات مغناطیسی یا رادیویی باعث میشود استفاده از سیستمهای موقعیتیابی متداول مبتنی بر GPS نهتنها دشوار، بلکه در بسیاری از مواقع غیرممکن شود. قطع یا تضعیف سیگنالهای GPS میتواند باعث توقف کامل عملیات رباتهای خودران یا حتی بروز خطرات ایمنی شود. در این شرایط، صنعت به دنبال یک «چشم جایگزین» برای رباتهاست؛ ابزاری که بتواند مستقل از ماهوارهها، بهطور محلی و در لحظه موقعیت ربات را تعیین کند و مسیر ایمن و بهینهای برای حرکت پیشنهاد دهد.
اینجاست که فناوری اسکن لیزری سهبعدی (۳D LiDAR) وارد میدان میشود و نقش یک انقلاب تکنولوژیک را ایفا میکند. لیزر سهبعدی به رباتها این امکان را میدهد که نهتنها سطح زمین، بلکه تمام موانع و ساختارهای پیرامون را در قالب یک نقشهی دقیق و پرجزئیات بازسازی کنند. برخلاف سنسورهای سادهتر دوبعدی که تنها خطوط یا مقاطع محدود از محیط را در اختیار میگذارند، لیزر سهبعدی حجم کاملی از دادهها را فراهم میکند و با استفاده از الگوریتمهای پردازش ابری نقطهای (Point Cloud Processing) میتواند بهصورت لحظهای نقشهای پویا بسازد. این یعنی ربات میتواند در محیطهای شلوغ، نامنظم و بدون هیچ زیرساخت خارجی، همچون یک موجود زنده با «حس فضایی» حرکت کند. از دیدگاه صنعتی، این فناوری تحولی بنیادین ایجاد میکند، چراکه وابستگی به GPS و زیرساختهای پرهزینه و شکننده حذف میشود و استقلال عملیاتی ربات به حداکثر میرسد.
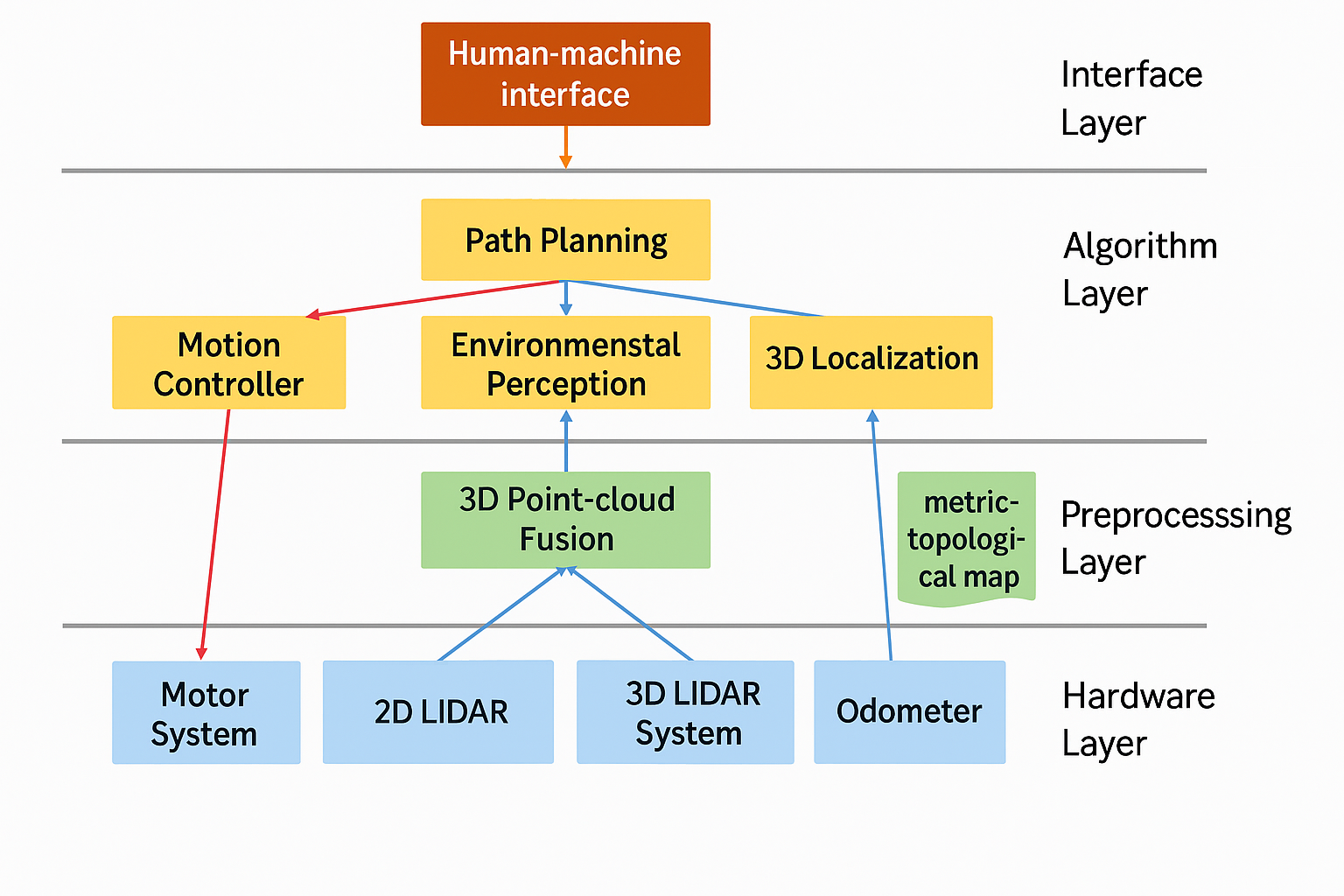
مقالهای که مبنای این گزارش است دقیقاً روی همین نقطه تمرکز دارد. نویسندگان با طراحی یک پلتفرم ربات دیفرانسیلی مجهز به انکودر چرخها، لیزر دوبعدی برای اجتناب از موانع نزدیک و یک اسکنر سهبعدی اختصاصی برای مکانیابی دقیق، یک چارچوب کامل برای حرکت و ناوبری ربات در محیطهای بیرونی بدون GPS ارائه کردهاند. آنها نشان دادهاند که ترکیب نقشهبرداری متریک–توپولوژیک با الگوریتمهای ثبت سهبعدی (۳D Registration) و طراحی یک کنترلکننده مبتنی بر تئوری لیاپانوف میتواند خطای مکانیابی را تا حدود ۱۰ سانتیمتر کاهش دهد و دقت زاویهای در حد ۶ درجه فراهم کند؛ دستاوردی که از نظر کاربردی در سطح استانداردهای صنعتی قابلقبول و حتی رقابتی است. اهمیت این دستاورد تنها در بعد فنی خلاصه نمیشود، بلکه از منظر صنعتی و اقتصادی نیز چشمگیر است: کارخانهها و بنگاههای لجستیکی دیگر مجبور نخواهند بود برای ناوبری رباتهایشان هزینههای سنگین ایجاد زیرساختهای GPS داخلی یا نشانهگذاریهای مصنوعی را بپردازند، بلکه میتوانند با تکیه بر فناوری لیزر سهبعدی، استقلال عملیاتی، انعطافپذیری و ایمنی بیشتری به دست آورند.
در واقع، میتوان گفت این مقاله با رویکردی آیندهنگرانه به یک پرسش کلیدی در صنعت پاسخ داده است: «چگونه میتوان رباتهای خودران را در محیطهای باز و پیچیدهای که GPS در آن غایب یا ضعیف است، بهطور دقیق و ایمن هدایت کرد؟» پاسخ، همانطور که نویسندگان نشان دادهاند، در بهرهگیری هوشمندانه از فناوری لیزر سهبعدی نهفته است؛ فناوریای که رباتها را از محدودیتهای سنتی رها کرده و یک انقلاب واقعی در حوزه ناوبری صنعتی رقم میزند.
چالشهای موجود در ناوبری رباتهای صنعتی بدون GPS
وابستگی بیشازحد به GPS و ضعف سیگنالها
یکی از بزرگترین چالشهای رباتهای خودران در محیطهای صنعتی باز، اتکا به سیستمهای موقعیتیابی ماهوارهای است. هرچند GPS در جادهها یا محیطهای شهری عملکرد قابلقبولی دارد، اما در محوطههای صنعتی با سازههای فلزی عظیم، دیوارهای بتنی یا جرثقیلهای مرتفع، کیفیت سیگنال بهشدت افت میکند. این ضعف باعث میشود ربات نتواند موقعیت خود را بهدرستی تعیین کند و در نتیجه ناوبری ایمن و پایدار مختل شود. در صنایعی چون فولاد یا پتروشیمی، چنین خطاهایی میتواند هزینههای سنگین و خطرات ایمنی جدی به دنبال داشته باشد.
انباشت خطا در روشهای جایگزین
وقتی GPS در دسترس نباشد، معمولاً از ادومتری یا حسگرهای اینرسی استفاده میشود. اما این روشها در معرض مشکل «Drift» یا انباشت خطا هستند. هرچه ربات بیشتر حرکت کند، خطاهای کوچک در اندازهگیری بهتدریج جمع میشوند و باعث میشوند تخمین موقعیت از واقعیت فاصله بگیرد. در محیطهای صنعتی با مسیرهای طولانی و تکراری، این پدیده منجر به کاهش اعتمادپذیری و نیاز به بازنشانیهای مکرر موقعیت میشود که هزینه و زمان عملیات را افزایش میدهد.
محدودیتهای سنسورهای دوبعدی
بسیاری از رباتها از لیزر دوبعدی برای اجتناب از موانع استفاده میکنند. این ابزارها تنها قادرند یک برش افقی از محیط را ثبت کنند و نمیتوانند موانع سهبعدی یا تغییرات ارتفاع را شناسایی کنند. نتیجه آن است که در محیطهای ناهموار یا نامنظم، رباتها دچار خطا یا توقف کامل میشوند. در صنایع پویا که دائماً شکل محیط تغییر میکند و ترکیبی از موانع ثابت و متحرک وجود دارد، این محدودیت بهوضوح ناکارآمد است.
ضعف در برنامهریزی مسیر در محیطهای پیچیده
حتی در صورت داشتن مکانیابی دقیق، نبود یک الگوریتم تصمیمگیری قوی برای انتخاب مسیر بهینه، مشکلساز است. بسیاری از الگوریتمهای سنتی تنها در محیطهای ساختارمند مثل انبارها عملکرد خوبی دارند. اما در فضاهای باز صنعتی که موانع پویا مثل کامیونها یا کارگران وجود دارند، ربات باید بتواند بهصورت بلادرنگ مسیرهای جایگزین تولید و بهترین را انتخاب کند. نبود این قابلیت، بهرهوری و ایمنی را بهشدت کاهش میدهد.
چالش یکپارچگی سختافزار و نرمافزار
ادغام اجزای سختافزاری مانند لیزر سهبعدی، حسگرهای متنوع و رایانههای صنعتی با نرمافزارهای سنگین پردازش داده، یک چالش جدی است. هماهنگی این لایهها باید در سطح بلادرنگ انجام شود تا دادههای اسکن سریعاً پردازش و به فرمان حرکتی تبدیل شوند. کوچکترین ناهماهنگی میتواند باعث تأخیر در تصمیمگیری، افت کارایی و حتی حوادث ناخواسته شود.
دیدگاه نوآورانه مقاله
نوآوری اصلی مقاله در این است که نویسندگان بهجای تکیه بر GPS یا روشهای کلاسیک مکانیابی، یک چارچوب یکپارچه مبتنی بر لیزر سهبعدی طراحی کردهاند که سه جزء کلیدی را همزمان پوشش میدهد: کنترل حرکت، مکانیابی دقیق و برنامهریزی مسیر. این نگاه سیستماتیک باعث میشود که ربات بتواند حتی در محیطهای بسیار پیچیده و فاقد GPS، موقعیت خود را با دقت بالا حفظ کند و بدون وابستگی به زیرساختهای خارجی حرکت کند.
استفاده از اسکنر سهبعدی بهعنوان «چشم اصلی ربات»
برخلاف بیشتر تحقیقات پیشین که از لیزر دوبعدی یا ترکیب سادهی ادومتری و دوربین استفاده میکردند، این مقاله لیزر سهبعدی را بهعنوان محور اصلی ناوبری معرفی کرده است. لیزر سهبعدی نهتنها موانع را در همه ابعاد تشخیص میدهد، بلکه امکان ساخت نقشهی پرجزئیات از محیط را فراهم میسازد. این نقشه به ربات قدرت میدهد تا همانند یک نقشهی ذهنی انسانی، موقعیت خود را با توجه به نشانههای محیطی اصلاح کند و از خطاهای تجمعی جلوگیری نماید.
ترکیب نقشه متریک–توپولوژیک با تطبیق سهبعدی (۳D Registration)
یکی از نوآوریهای مهم این مقاله، استفاده از نقشههای متریک–توپولوژیک در کنار الگوریتم ثبت سهبعدی (۳D Normal Distribution Transform) است. این ترکیب باعث میشود که ربات بتواند هم مسیرهای کلی و ایستگاههای کلیدی را بداند (دید توپولوژیک) و هم در هر نقطه، موقعیت دقیق خود را با تطبیق دادههای اسکن سهبعدی با نقشهی مرجع اصلاح کند (دید متریک). به این ترتیب، مشکل خطای انباشتهی ادومتری به حداقل میرسد و دقت مکانیابی حتی در مسیرهای طولانی حفظ میشود.
طراحی کنترلکننده مبتنی بر تئوری لیاپانوف
نوآوری دیگر در بخش کنترل حرکتی است. بهجای استفاده از کنترلکنندههای ساده تناسبی یا روشهای سنتی PID، مقاله از یک کنترلکننده مبتنی بر تئوری لیاپانوف استفاده کرده است. این طراحی تضمین میکند که خطای ربات در دنبالکردن مسیر مرجع بهطور ریاضی همواره همگرا به صفر شود و ربات بتواند در شرایط واقعی با دقت زیر چند سانتیمتر مسیرهای پیچیده را دنبال کند.
راهبرد هوشمند برای برنامهریزی مسیر
در حوزه اجتناب از موانع و انتخاب مسیر، مقاله یک روش اولویتبندی چندگانه ارائه کرده است. این روش به ربات اجازه میدهد که بسته به شرایط محیط، بین دو حالت مختلف تصمیمگیری کند: یا به سمت راست حرکت کند (در محیطهای ساختارمند مانند جادهها) یا مسیر پیشین را دنبال کند (در محیطهای غیرساختارمند). این انعطافپذیری باعث میشود که ربات در طیف وسیعی از محیطها، از کارخانهها تا فضاهای باز شهری، عملکرد پایداری داشته باشد.
ایجاد یک چارچوب کامل برای صنعت
در نهایت، نوآوری مقاله در نگاه جامع آن است. بهجای تمرکز بر یک بخش منفرد (مثل فقط مکانیابی یا فقط کنترل)، یک سیستم کامل معرفی شده است که همهی ماژولهای کلیدی را پوشش میدهد: از سختافزار و حسگرها تا الگوریتمهای نرمافزاری و تستهای واقعی. این جامعنگری، مقاله را از تحقیقات آزمایشگاهی صرف متمایز میکند و آن را به یک راهحل صنعتی قابلاجرا تبدیل میسازد.
روش پیشنهادی مقاله
نویسندگان مقاله برای حل مسئله ناوبری ربات در محیطهای بدون GPS، یک چارچوب کامل و گامبهگام ارائه کردهاند که شامل طراحی سختافزار، مدلسازی ریاضی، کنترل حرکت، مکانیابی سهبعدی و برنامهریزی مسیر است. این روش را میتوان در پنج گام اصلی توضیح داد:
طراحی و آمادهسازی پلتفرم سختافزاری
در اولین گام، یک پلتفرم ربات دیفرانسیلی توسعه داده شد که از دو چرخ محرک و چند چرخ آزاد پشتیبان تشکیل شده است. این ساختار به دلیل شعاع چرخش صفر، انعطافپذیری بالایی در حرکت دارد. ربات به حسگرهای کلیدی مجهز شده است: انکودر چرخها برای محاسبه حرکت نسبی، لیزر دوبعدی برای تشخیص موانع نزدیک، و یک اسکنر سهبعدی اختصاصی برای بازسازی محیط و مکانیابی دقیق. این ترکیب به ربات امکان میدهد دادههای خام متنوعی از محیط دریافت کند و پایهای برای لایههای بعدی نرمافزاری فراهم سازد.
مدلسازی سینماتیکی و طراحی کنترلکننده مبتنی بر لیاپانوف
پس از آمادهسازی پلتفرم، گام دوم بر طراحی مدل ریاضی حرکت ربات متمرکز است. معادلات سینماتیکی ربات دیفرانسیلی استخراج شده و سپس با استفاده از نظریه لیاپانوف، یک کنترلکننده پایدار طراحی میشود. این کنترلکننده به گونهای است که خطاهای ربات در دنبال کردن مسیر مرجع همواره به صفر همگرا شوند. نتیجه آن است که حتی در حضور خطاهای کوچک یا نویزهای حرکتی، ربات میتواند مسیرهای از پیش تعیینشده را با دقت زیر دو سانتیمتر دنبال کند. این دقت در سطح صنعتی، به معنای کاهش برخوردها و افزایش ایمنی عملیاتی است.
مکانیابی دقیق با استفاده از نقشه متریک–توپولوژیک و تطبیق سهبعدی
در گام سوم، مسئله کلیدی مکانیابی حل میشود. ابتدا یک نقشه متریک–توپولوژیک ساخته میشود که شامل گرهها (نقاط کلیدی مسیر) و یالها (ارتباط بین گرهها) است. هر گره نهتنها موقعیت مکانی بلکه ابرنقاط سهبعدی محیط اطراف را ذخیره میکند. سپس در طول حرکت، دادههای لیزر سهبعدی با این نقشه مرجع تطبیق داده میشود. برای این کار، الگوریتم ۳D Normal Distribution Transform به کار میرود که نسبت به الگوریتمهای کلاسیک مانند ICP، هم سریعتر است و هم مقاومتر در برابر نویز. این فرآیند باعث میشود خطاهای تجمعی ادومتری اصلاح شده و مکانیابی با دقت بالا انجام شود.
تحلیل محیط محلی و تشخیص موانع با ویژگیهای هندسی
گام چهارم شامل تحلیل دادههای محیط محلی برای شناسایی موانع و مسیرهای قابلعبور است. دادههای حجیم اسکن سهبعدی ابتدا به شبکههای دوبعدی روی زمین نگاشت میشوند تا سادهتر پردازش شوند. سپس با تحلیل ویژگیهای هندسی مانند لبه جادهها یا نقاط تغییر انحنا، ربات قادر است نواحی ایمن و موانع احتمالی را شناسایی کند. این رویکرد باعث میشود ربات نهتنها موانع آشکار (مثل خودروهای پارکشده) بلکه موانع پنهان یا ناهمواریهای کوچک را نیز تشخیص دهد.
برنامهریزی مسیر تطبیقی با اولویتبندی
در آخرین گام، مقاله یک راهبرد برنامهریزی مسیر مبتنی بر اولویت معرفی میکند. در این روش، چند مسیر جایگزین تولید میشوند و سپس بر اساس معیارهایی مانند ایمنی، نزدیکی به مسیر مرجع و دوری از موانع، رتبهبندی میشوند. الگوریتم دو حالت دارد: «حرکت به سمت راست» در محیطهای ساختارمند، و «دنبال کردن مسیر مرجع» در محیطهای غیرساختاریافته. این انعطافپذیری به ربات اجازه میدهد در شرایط مختلف، از جادههای سازمانیافته گرفته تا محوطههای شلوغ صنعتی، بهترین مسیر را انتخاب کند و با اطمینان حرکت کند.
پیادهسازی و ارزیابی عملکرد
محیط آزمایشگاهی و صحنه تست
برای اعتبارسنجی روش پیشنهادی، نویسندگان یک محیط صنعتی واقعی را شبیهسازی کردند. محل آزمایش یک محوطه کارخانهای با مسیر به شکل عدد ۸ به طول ۱.۲ کیلومتر انتخاب شد؛ محیطی که شامل جادهها، ساختمانها، خودروهای متحرک و حتی حضور محدود عابران پیاده بود. این فضا عمداً انتخاب شد تا پیچیدگیهای محیطی (ترکیب موانع ثابت و پویا) و همچنین ضعف سیگنال GPS بهطور کامل بازتاب پیدا کند. وجود چنین شرایطی اهمیت زیادی داشت، زیرا یکی از اهداف اصلی مقاله اثبات توانایی ربات در محیطهای واقعی و غیرکنترلشده بود، نه صرفاً در سناریوهای آزمایشگاهی ساده.
عملکرد کنترل حرکتی در محیطهای پرمانع
یکی از اولین گامهای ارزیابی، تست کنترلکننده طراحیشده بر اساس نظریه لیاپانوف بود. ربات در یک محیط مصنوعی پر از موانع مختلف (جعبهها و موانع ثابت) قرار گرفت تا تواناییاش در دنبالکردن مسیرهای منحنی و پیچیده بررسی شود. نتایج نشان داد که ربات قادر بود مسیرهای مختلف (حرکت مستقیم، چرخش درجا، مسیرهای منحنی) را با دقت بسیار بالا دنبال کند. خطای موقعیت در این تستها کمتر از ۲ سانتیمتر بود که در مقایسه با کنترلکنندههای سنتی، جهشی چشمگیر محسوب میشود. این دقت برای کاربردهای صنعتی مانند حملونقل مواد یا حرکت در راهروهای باریک، یک مزیت رقابتی جدی به شمار میآید.
ساخت نقشه و تصحیح موقعیت
در گام بعدی، نقشه متریک–توپولوژیک محیط ساخته شد. ابتدا نقشه خام تنها بر اساس ادومتری تولید شد که همانطور که انتظار میرفت دچار اعوجاج و خطای تجمعی بود. سپس دادههای اسکن سهبعدی وارد شد و با استفاده از الگوریتم ۳D-NDT، موقعیتها بهصورت دورهای اصلاح گردید. نتیجه این فرآیند، نقشهای دقیق و منظم بود که اختلاف چشمگیری با نسخه اولیه داشت. این آزمایش بهوضوح نشان داد که مکانیابی مبتنی بر لیزر سهبعدی میتواند ضعفهای ذاتی ادومتری را برطرف کند و اعتمادپذیری نقشهبرداری را به سطح صنعتی ارتقا دهد.
اجتناب از موانع و عبور از مسیرهای باریک
یکی از حساسترین بخشهای آزمایش، بررسی توانایی ربات در اجتناب از موانع ثابت و پویا بود. در این تست، ربات با شرایطی روبهرو شد که شامل خودروهای در حال حرکت و مناطق باریک با عرض کمتر از ۱.۸ متر بود. الگوریتم اولویتبندی معرفیشده باعث شد ربات بتواند در لحظه مسیر ایمن را انتخاب کند و بدون برخورد از موانع عبور کند. این نتیجه در مقایسه با روشهای کلاسیک اجتناب از مانع که معمولاً فقط در محیطهای ایستا کاربرد دارند، یک پیشرفت بزرگ محسوب میشود.
دقت مکانیابی و نتایج کمی
برای اندازهگیری کمی دقت مکانیابی، هشت نقطه تست روی مسیر مشخص شد. در آزمایش رفت و برگشت، خطای موقعیت میانگین برابر با ۱۰ سانتیمتر و خطای زاویه میانگین حدود ۶ درجه بود. جالب آنکه خطای حرکت برگشتی کمی بیشتر از حرکت رفت بود، زیرا نقشه مرجع در حالت رفت ایجاد شده بود و در نتیجه تطبیق دادهها در آن حالت دقت بیشتری داشت. با این حال، حتی در بدترین حالت، دقت به سطحی رسید که برای کاربردهای صنعتی مانند حمل بار خودکار یا ناوبری در محوطههای کارخانهای کاملاً کافی و قابلاعتماد است.
ارزیابی کلی عملکرد
بهطور کلی، آزمایشها نشان دادند که ربات توسعهیافته میتواند بدون اتکا به GPS، یک مسیر طولانی بیش از ۲.۴ کیلومتر را بهطور کامل و ایمن طی کند. کنترل حرکتی پایدار، تصحیح موقعیت دقیق با اسکنر سهبعدی و اجتناب هوشمند از موانع، همگی اثبات کردند که چارچوب پیشنهادی قابلیت عملیاتی شدن در محیطهای صنعتی واقعی را دارد. این سطح از کارایی نشاندهندهی یک گام بزرگ بهسمت استقلال عملیاتی رباتها در محیطهای پیچیده و پویاست.
کاربردهای صنعتی و سناریوهای واقعی
لجستیک هوشمند در کارخانهها و انبارها
یکی از مهمترین حوزههای کاربرد این فناوری، لجستیک داخلی کارخانهها و انبارهای بزرگ است. در چنین محیطهایی رباتهای خودران مسئول حمل مواد اولیه، قطعات نیمهساخته یا محصولات نهایی هستند. ضعف GPS در سالنهای سرپوشیده یا محوطههای نیمهباز باعث میشود سیستمهای سنتی کارایی نداشته باشند. اما استفاده از اسکنر سهبعدی به ربات امکان میدهد نقشهای دقیق از مسیرهای بین قفسهها و ایستگاهها بسازد، موانع انسانی و ماشینی را در لحظه شناسایی کند و با دقت بالا محمولهها را منتقل نماید. نتیجه این است که جریان مواد در کارخانه بدون وقفه و با حداقل خطا مدیریت میشود و بهرهوری بهطور قابلتوجهی افزایش مییابد.
رباتهای خودران در محوطههای صنعتی سنگین
صنایع سنگین مانند فولاد، سیمان، معدن یا پتروشیمی محیطهایی دارند که از نظر زیرساختی برای GPS بسیار نامناسب است. حضور سازههای فلزی عظیم، دستگاههای تولیدکننده نویز الکترومغناطیسی و شرایط محیطی خشن، رباتهای سنتی را با مشکل مواجه میکند. فناوری مبتنی بر لیزر سهبعدی راهحل مناسبی برای این چالش است، زیرا کاملاً مستقل از سیگنالهای خارجی عمل میکند و بر پایه دادههای واقعی محیط تصمیمگیری مینماید. این بدان معناست که رباتهای خودران میتوانند با ایمنی بالا وظایفی مانند انتقال مواد اولیه در معدن یا حمل محصولات در خطوط فولادسازی را انجام دهند، بدون اینکه نیاز به زیرساخت اضافی یا نشانهگذاریهای پرهزینه وجود داشته باشد.
بازرسی و ایمنی در محیطهای پرخطر
یکی دیگر از کاربردهای کلیدی، رباتهای بازرسی خودکار در محیطهای پرخطر است. در پالایشگاهها، نیروگاهها یا تأسیسات شیمیایی، ورود نیروی انسانی برای پایش تجهیزات با خطرات جدی همراه است. رباتهایی که به اسکنر سهبعدی مجهز باشند میتوانند بدون GPS وارد این محیطها شوند، نقشه سهبعدی دقیقی از مسیر و موانع تهیه کنند و بهصورت خودکار مسیرهای ایمن را طی کنند. علاوه بر کاهش خطر برای نیروی انسانی، این رویکرد امکان پایش مداوم و دقیق را فراهم میکند که در افزایش ایمنی و کاهش هزینههای نگهداری بسیار مؤثر است.
حملونقل خودکار در بنادر و پایانهها
بنادر و پایانههای کانتینری محیطهایی هستند که تراکم بالای تجهیزات فلزی و سازههای مرتفع باعث اختلال شدید GPS میشود. با این حال، نیاز به جابهجایی دقیق کانتینرها و محمولهها در چنین فضاهایی بسیار بالاست. رباتهای مجهز به لیزر سهبعدی میتوانند مسیرهای باریک بین کانتینرها را بدون نیاز به سیگنالهای ماهوارهای طی کنند، موانع را بهصورت سهبعدی شناسایی کرده و بارها را با دقت به مقصد برسانند. این تحول میتواند بهرهوری بنادر را افزایش داده و وابستگی به نیروی انسانی را کاهش دهد.
زیرساختهای شهری و عملیات عمرانی
در پروژههای عمرانی یا عملیات شهری، رباتهای خودران بهعنوان ابزارهای کمکی در حمل مصالح، اجرای بازرسی یا حتی نقشهبرداری مورد استفاده قرار میگیرند. در بسیاری از این فضاها، GPS به دلیل وجود تونلها، پلها یا ساختمانهای مرتفع قابلاعتماد نیست. فناوری لیزر سهبعدی با قابلیت بازسازی دقیق محیط و تشخیص لحظهای موانع، رباتها را قادر میسازد بدون اتکا به زیرساخت خارجی فعالیت کنند. این قابلیت بهویژه در شهرهای هوشمند آینده که نیاز به هماهنگی خودکار میان رباتها و تجهیزات شهری دارند، یک مزیت رقابتی کلیدی محسوب میشود.
جمعبندی استراتژیک و مزیتهای رقابتی
وقتی به تصویر کلی نگاه میکنیم، فناوری ناوبری رباتهای خودران با اتکا بر لیزر سهبعدی را میتوان یک مزیت استراتژیک برای صنایع آینده دانست. نخستین نکته در این جمعبندی، استقلال عملیاتی است. تا پیش از این، بسیاری از صنایع مجبور بودند به زیرساختهای خارجی مانند GPS یا نشانهگذاریهای پرهزینه وابسته باشند. اما در رویکرد معرفیشده در این مقاله، رباتها میتوانند تنها با دادههای حسگر داخلی، موقعیت دقیق خود را پیدا کنند و مسیر ایمن را انتخاب نمایند. این استقلال، هزینههای پیادهسازی را کاهش داده و وابستگی به فناوریهای بیرونی را از میان برمیدارد؛ موضوعی که در شرایط رقابتی جهانی اهمیت فراوانی دارد.
مزیت دوم، دقت و اعتمادپذیری بالا در شرایط واقعی است. نتایج مقاله نشان دادند که حتی در مسیرهای طولانی و محیطهای پرمانع، میانگین خطای مکانیابی تنها در حد ۱۰ سانتیمتر و خطای زاویهای حدود ۶ درجه باقی میماند. این اعداد نهتنها برای کاربردهای پژوهشی بلکه برای عملیات صنعتی نیز بسیار مطلوب هستند. چنین دقتی به معنای کاهش توقفهای ناخواسته، جلوگیری از برخورد با موانع و افزایش ایمنی پرسنل است. صنایع سنگین و لجستیک دقیقاً به همین سطح از اعتمادپذیری نیاز دارند تا بتوانند به سمت اتوماسیون کامل حرکت کنند.
مزیت سوم، انعطافپذیری و سازگاری در محیطهای متنوع است. الگوریتمهای تصمیمگیری مقاله قادرند بسته به شرایط، بین حالتهای مختلف (حرکت به راست یا دنبالکردن مسیر مرجع) تغییر وضعیت دهند. این انعطاف به ربات اجازه میدهد در طیف وسیعی از محیطها، از کارخانههای ساختارمند تا بنادر و معادن باز، عملکرد پایداری داشته باشد. در واقع، رباتها دیگر به یک سناریوی خاص محدود نمیشوند و میتوانند در چندین صنعت بهطور همزمان ارزشآفرینی کنند.
از منظر کلان، این فناوری یک مزیت رقابتی جهانی برای شرکتهایی محسوب میشود که بهدنبال حضور در عرصه Industry 4.0 هستند. بازار جهانی رباتهای خودران بهشدت در حال رشد است و سازمانهایی که زودتر به فناوریهای مستقل از GPS روی بیاورند، قادر خواهند بود محصولات و خدماتی رقابتیتر ارائه دهند. همچنین، این تحول میتواند به کاهش هزینههای نیروی انسانی، افزایش بهرهوری لجستیکی و ارتقای سطح ایمنی کمک کند؛ سه شاخصی که در رقابت بینالمللی نقش تعیینکننده دارند.
در نهایت باید گفت، مقاله نهتنها یک نوآوری فنی ارائه کرده، بلکه راهی روشن برای مدیران صنعتی ترسیم کرده است: اگر بخواهند در آیندهی نزدیک در بازار جهانی باقی بمانند و سهم بیشتری از صنعت چهارم را در اختیار بگیرند، باید به سمت فناوریهای خودران بدون GPS و مبتنی بر حسگرهای سهبعدی حرکت کنند. این انتخاب دیگر یک گزینه لوکس یا آزمایشگاهی نیست، بلکه یک ضرورت استراتژیک برای بقا و رقابت است.
نتیجهگیری و دعوت به اقدام
در جمعبندی نهایی، میتوان گفت که رباتهای خودران مبتنی بر لیزر سهبعدی نهتنها یک گام فنی، بلکه یک جهش راهبردی برای صنعت محسوب میشوند. مقاله نشان داد که با طراحی دقیق پلتفرم سختافزاری، استفاده از الگوریتمهای پیشرفته مکانیابی و برنامهریزی مسیر، و ادغام همه این اجزا در یک چارچوب منسجم، میتوان بر بزرگترین مانع ناوبری در محیطهای صنعتی یعنی نبود GPS غلبه کرد. دستیابی به دقت مکانیابی در حد ۱۰ سانتیمتر و توانایی عبور ایمن از محیطهای پرموانع، نشان میدهد که این فناوری آماده است تا از آزمایشگاهها وارد خطوط تولید و محوطههای واقعی شود.
از منظر صنعتی، پیام این مقاله روشن است: آیندهی لجستیک، بازرسی، نگهداری و عملیات در صنایع سنگین به سمت سیستمهای خودران میرود و تنها فناوریهایی موفق خواهند شد که استقلال عملیاتی و اعتمادپذیری بالا را تضمین کنند. لیزر سهبعدی در این میان نقش یک «انقلاب» را ایفا میکند، چراکه رباتها را از وابستگی به زیرساختهای شکننده و پرهزینه رها میسازد. این همان تغییری است که مدیران صنعتی باید در استراتژیهای خود لحاظ کنند.
دعوت به اقدام
مدیران، مهندسان و تصمیمگیران صنعتی امروز باید یک پرسش کلیدی از خود بپرسند: «آیا سازمان ما آماده است تا ناوبری بدون GPS را بهعنوان یک مزیت رقابتی در فرآیندهای خود پیادهسازی کند؟» پاسخ به این پرسش میتواند آیندهی موقعیت آنها را در بازار جهانی صنعت چهارم تعیین کند. سرمایهگذاری در تحقیق و توسعه رباتهای مجهز به لیزر سهبعدی، آزمایش این سیستمها در پروژههای پایلوت و حرکت بهسوی اتوماسیون کامل، گامهایی هستند که نباید به تأخیر بیفتند. آنچه امروز بهعنوان نوآوری مطرح میشود، فردا به یک استاندارد جهانی تبدیل خواهد شد.
رفرنس مقاله
Yang, Q., Qu, D., Xu, F., Zou, F., He, G., & Sun, M. (2018). Mobile robot motion control and autonomous navigation in GPS-denied outdoor environments using 3D laser scanning. Assembly Automation. Emerald Publishing Limited. DOI: 10.1108/AA-02-2018-029



{kind=link}
بدون نظر