

از Drift تا دقت: مکانیابی هوشمند رباتها با Sliding Window Optimization
در محیطهای صنعتی مدرن، رباتهای متحرک نقشی حیاتی در خودکارسازی فرآیندها ایفا میکنند؛ از جابهجایی مواد در کارخانههای تولیدی گرفته تا مدیریت لجستیک در انبارهای هوشمند. اما یکی از بزرگترین موانع در مسیر گسترش این فناوری، مسئلهی مکانیابی دقیق است. ربات برای حرکت ایمن و کارآمد باید بداند در هر لحظه دقیقاً کجا قرار دارد. کوچکترین خطا در تخمین موقعیت میتواند منجر به برخورد با موانع، انحراف از مسیر یا حتی توقف کامل عملیات شود؛ مشکلاتی که در صنایع سنگین یا خطوط تولید پرسرعت هزینههای سنگینی بهدنبال دارد.
سالهاست که فناوری Visual-Inertial Odometry (VIO) که ترکیب دوربین و واحد اندازهگیری اینرسی (IMU) است، بهعنوان راهحلی محبوب برای مکانیابی رباتها بهکار میرود. VIO میتواند اطلاعات موقعیت و جهتگیری را در شش درجه آزادی (۶DOF) تخمین بزند و در مقایسه با سیستمهای گرانقیمت لیزری یا GPS، گزینهای کمهزینهتر و انعطافپذیرتر است. با این حال، این فناوری یک نقطهضعف جدی دارد: در محیطهایی با بافت ضعیف، نور کم یا صحنههای پویا دچار خطای انباشته (Drift) میشود. Drift یعنی ربات بهمرور زمان بیشتر و بیشتر از موقعیت واقعی خود فاصله میگیرد، تا جایی که دیگر دادههایش غیرقابلاعتماد میشوند.
اینجا جایی است که نوآوری مقاله حاضر اهمیت پیدا میکند. نویسندگان با بهرهگیری از مارکرهای دیداری (مانند ArUco و AprilTag) و ترکیب آنها با دادههای دوربین و IMU، الگوریتمی طراحی کردهاند که نهتنها خطای Drift را مهار میکند بلکه دقت مکانیابی را به سطحی میرساند که برای کاربردهای صنعتی سنگین مناسب باشد. آنها این کار را با استفاده از یک روش پیشرفته بهینهسازی به نام Sliding Window Optimization انجام دادهاند؛ روشی که امکان میدهد دادههای چند قاب تصویری، دادههای اینرسی و مشاهدات مارکرها همزمان در یک چارچوب ریاضی بهینه شوند.
به بیان ساده، مقاله به این پرسش پاسخ میدهد: «چگونه میتوان رباتی را در محیطی با نور ضعیف، سطوح بدون بافت یا بازتابهای شدید بهگونهای هدایت کرد که همچنان موقعیت خود را با دقت حفظ کند؟» پاسخ، همانطور که در این پژوهش نشان داده شده، در فیوژن هوشمند چند حسگر و طراحی الگوریتمهای بهینهسازی مقیاسپذیر نهفته است. این مقدمه نشان میدهد که مسئله مکانیابی رباتها دیگر صرفاً یک چالش آکادمیک نیست، بلکه یک موضوع استراتژیک برای بقا و رقابتپذیری صنایع در دوران Industry 4.0 به شمار میرود.
چالشهای موجود در مکانیابی رباتهای صنعتی
خطای تجمعی (Drift) در سیستمهای VIO
یکی از جدیترین مشکلات سیستمهای Visual-Inertial Odometry، خطای تجمعی یا Drift است. وقتی ربات در یک مسیر طولانی حرکت میکند، حتی خطاهای کوچک ناشی از دوربین یا IMU بهمرور جمع میشوند و باعث میشوند موقعیت تخمینی بهطور قابلتوجهی از موقعیت واقعی فاصله بگیرد. این مسئله در محیطهای صنعتی که دقت در حد سانتیمتر اهمیت دارد، میتواند منجر به توقف عملیات یا حتی بروز حوادث ایمنی شود.
عملکرد ضعیف در محیطهای بافتکم یا نور نامناسب
سیستمهای مبتنی بر ویژگیهای تصویری برای استخراج نقاط شاخص نیازمند محیطهایی با بافت غنی هستند. اما بسیاری از فضاهای صنعتی، مانند کفهای بتنی صیقلی، دیوارهای فلزی یا محیطهای کمنور، فاقد چنین ویژگیهاییاند. در این شرایط، الگوریتمهای VIO قادر به یافتن و ردیابی نقاط کافی نیستند و مکانیابی بهشدت افت میکند.
ابهام در تخمین وضعیت با مارکرهای دیداری
هرچند مارکرهای دیداری (مانند ArUco و AprilTag) میتوانند بهعنوان مرجع کمککننده استفاده شوند، اما استفاده از دادهی تکفریم آنها اغلب با ابهام در تخمین وضعیت (Pose Ambiguity) همراه است. به بیان دیگر، یک مارکر میتواند چندین وضعیت هندسی مختلف را توضیح دهد که همگی از دید الگوریتم ممکن بهنظر برسند. این موضوع اگر رفع نشود، باعث خطاهای ناگهانی در مکانیابی میشود.
محدودیت روشهای کوپلینگ سست (Loosely Coupled)
بیشتر سیستمهای موجود، دادههای دوربین، IMU و مارکرها را بهصورت سست و جداگانه ادغام میکنند. در این حالت، دادهها تنها در سطح خروجی با هم ترکیب میشوند، نه در عمق فرایند محاسبات. این باعث میشود ظرفیت اطلاعاتی حسگرها بهطور کامل استفاده نشود و همچنان خطا و Drift باقی بماند. برای رسیدن به دقت بالا و پایداری در محیطهای واقعی، نیاز به یک روش تنگکوپل (Tightly Coupled) است که دادهها را در یک چارچوب واحد بهینه کند.
چالش مقیاسپذیری و پیچیدگی محاسباتی
هرچه تعداد حسگرها و دادههای مورد استفاده بیشتر شود، بار محاسباتی الگوریتمها نیز افزایش مییابد. در کاربردهای صنعتی، ربات باید در زمان واقعی (Real-Time) مکانیابی کند. روشهای کلاسیک بهینهسازی اغلب در این سطح دچار کندی میشوند. بنابراین، طراحی الگوریتمی که بتواند حجم عظیم دادهها را مدیریت کند و همچنان سرعت و پایداری مورد نیاز صنعت را حفظ کند، یک چالش اساسی است.
دیدگاه نوآورانه مقاله
کوپلینگ تنگ بین دادههای تصویری، IMU و مارکرها
نوآوری اصلی مقاله در این است که نویسندگان بهجای ترکیب سست دادهها، یک چارچوب تنگکوپل (Tightly Coupled) طراحی کردهاند که اطلاعات دوربین، IMU و مارکرهای دیداری را همزمان در یک فرآیند بهینهسازی واحد ترکیب میکند. این موضوع باعث میشود هر منبع داده خطاهای دیگری را اصلاح کند و نتیجهی نهایی بسیار پایدارتر و دقیقتر باشد.
استفاده از Sliding Window Optimization بهعنوان موتور اصلی
در حالی که بسیاری از الگوریتمهای کلاسیک SLAM تنها بر اساس هموارسازی محلی یا فیلترهای ترتیبی عمل میکنند، مقاله از یک بهینهسازی لغزشی (Sliding Window Optimization) بهره برده است. این روش بهجای نگهداشتن همه دادهها، تنها یک پنجره زمانی از مشاهدات اخیر را نگه میدارد و روی آنها بهینهسازی غیرخطی انجام میدهد. نتیجه این است که هم سرعت محاسباتی حفظ میشود و هم دقت موقعیت در طول زمان تضمین میگردد.
مهار ابهام در تخمین وضعیت با چندمارکری
یکی از مشکلات کلاسیک استفاده از مارکرها، ابهام در تخمین وضعیت از روی یک تصویر منفرد است. مقاله این چالش را با معرفی قیدهای بازپراکنش چندفریم و چندمارکر (Multi-Frame, Multi-Tag Reprojection Constraints) حل کرده است. به بیان ساده، وقتی ربات از چند زاویه و در چند لحظه مختلف یک مارکر را ببیند، خطاهای احتمالی کاهش یافته و ابهام وضعیت از بین میرود. این روش دقت و پایداری مکانیابی را بهطور چشمگیری افزایش میدهد.
استراتژیهای پایداری در بهینهسازی
نویسندگان برای جلوگیری از مشکلات رایج Sliding Window مانند غیرقابلمشاهده بودن برخی حالتها (Non-Observability)، خطای اولیه زیاد یا نویز ناشی از تشخیص مارکر، مجموعهای از استراتژیهای بهبود طراحی کردهاند. این شامل سه بخش است:
استراتژی تثبیت Sliding Window برای جلوگیری از واگرایی
انتخاب هوشمند مقدار اولیه برای جلوگیری از گیرکردن در کمینههای محلی
معیار قضاوت برای سنجش اعتبار دادههای مارکر و حذف اندازهگیریهای مشکوک
نگاه کاربردی به محیطهای صنعتی واقعی
نوآوری دیگر مقاله این است که صرفاً روی شرایط آزمایشگاهی ساده تمرکز نکرده، بلکه محیطهای ضعیفبافت، کمنور و بازتابی را بهعنوان سناریوهای اصلی انتخاب کرده است. این همان محیطهایی است که در کارخانهها و انبارهای بزرگ بهوفور دیده میشود. این انتخاب نشان میدهد مقاله بهجای یک نوآوری صرفاً دانشگاهی، یک راهحل واقعی برای صنعت ارائه داده است.
روش پیشنهادی مقاله (گامبهگام)
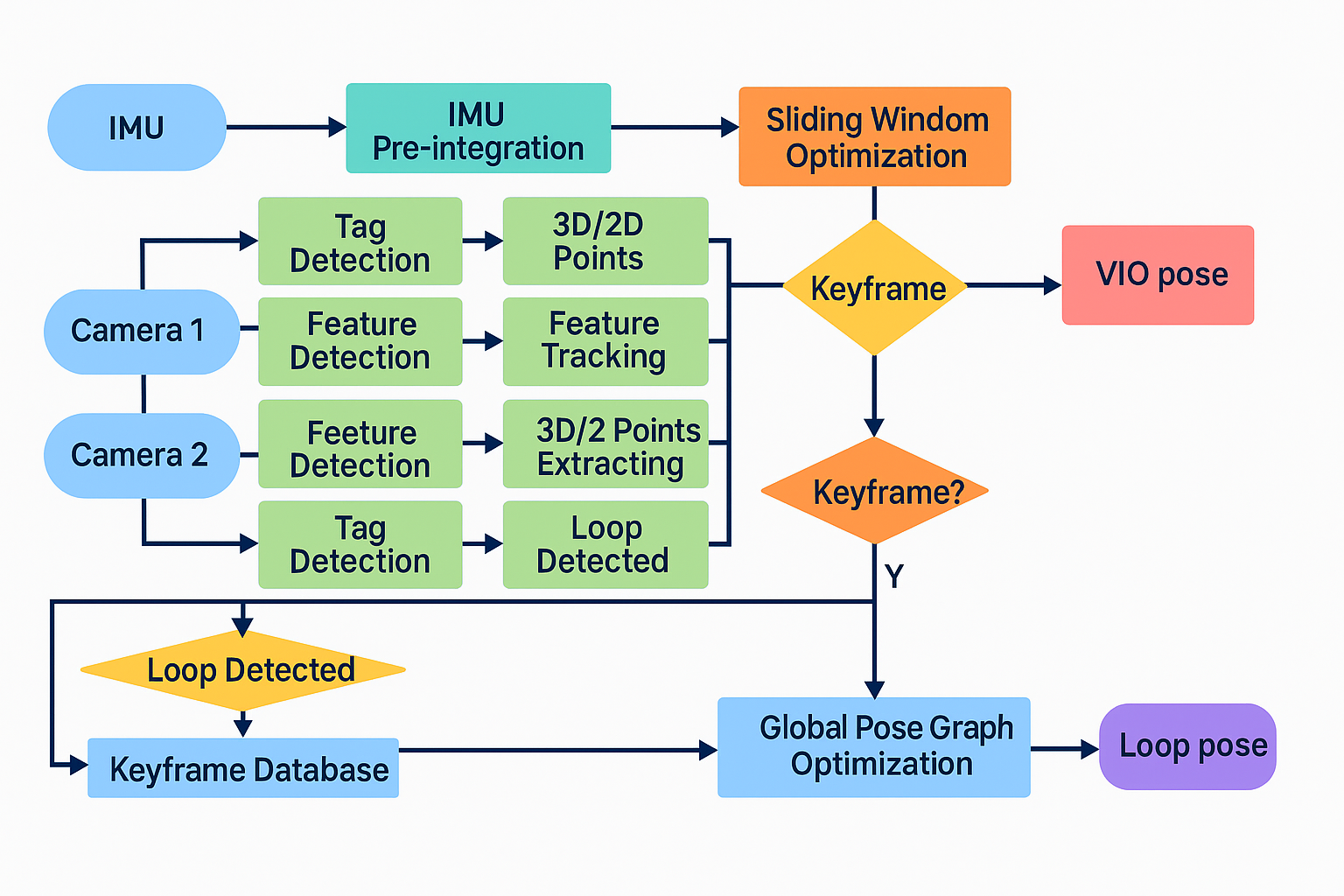
روش پیشنهادی این مقاله یک چارچوب کامل و یکپارچه برای مکانیابی رباتهای متحرک در شرایط سخت است که بر پایهی ترکیب هوشمند دادههای تصویری، اینرسی و مارکرهای دیداری بنا شده است. در نخستین گام، سیستم دادههای دریافتی از همه حسگرها شامل دوربینهای استریو، واحد IMU و انکودر چرخها را دریافت کرده و آنها را از نظر زمانی همگامسازی میکند. اهمیت این مرحله در آن است که حتی کوچکترین ناهماهنگی زمانی میتواند منجر به خطای شدید در تخمین وضعیت شود، بنابراین همگامسازی دقیق بستر اصلی برای همه مراحل بعدی محسوب میشود. پس از این، تصاویر دریافتی بهوسیله الگوریتمهای تشخیص مارکر پردازش میشوند تا نشانههای دیداری مانند ArUco یا AprilTag شناسایی شوند. استخراج گوشههای بیرونی و در صورت امکان گوشههای داخلی مارکرها اطلاعات هندسی ارزشمندی ایجاد میکند. به موازات این کار، ویژگیهای تصویری عمومی نیز از تصاویر استخراج و ردیابی میشوند تا علاوه بر دادههای مارکر، مجموعهای غنی از نقاط کلیدی در اختیار سیستم قرار گیرد.
در گام بعد، دادههای حرکتی از IMU و انکودر چرخها تحت فرآیندی موسوم به پیشیکپارچهسازی قرار میگیرند. این فرآیند تغییرات موقعیت، سرعت و زاویه بین دو فریم متوالی تصویر را محاسبه کرده و بهصورت قیود کمکی در بهینهسازی استفاده میشود. به بیان ساده، پیشیکپارچهسازی پلی است میان اندازهگیریهای لحظهای حسگرها و چارچوب ریاضی بهینهسازی، بهگونهای که دادههای حرکتی به شکل پایدار و یکپارچه وارد مدل شوند. پس از این آمادهسازی، نوبت به قلب اصلی الگوریتم یعنی بهینهسازی لغزشی (Sliding Window Optimization) میرسد. در این بخش، تمام دادههای موجود – از قیدهای بازپراکنش مارکرها گرفته تا قیود IMU، انکودر و ویژگیهای تصویری – بهصورت همزمان در قالب یک مسئله کمترین مربعات غیرخطی ادغام میشوند. ویژگی کلیدی این رویکرد آن است که سیستم تنها یک پنجره محدود از فریمهای اخیر را در نظر میگیرد و بهینهسازی را روی آنها انجام میدهد، بنابراین محاسبات قابل کنترل باقی میمانند و الگوریتم در زمان واقعی نیز قابلیت اجرا دارد.
با توجه به محدودیت منابع محاسباتی، سیستم ناچار است در هر لحظه تصمیم بگیرد کدام فریمها بهعنوان کلیدفریم حفظ شوند و کدامیک حذف شوند. مقاله برای این منظور یک استراتژی هوشمند معرفی کرده است که علاوه بر ویژگیهای تصویری، وضعیت مشاهده مارکرها را نیز در انتخاب دخالت میدهد. این تصمیمگیری دقیق موجب میشود که دادههای حیاتی حفظ شده و در عین حال حجم محاسباتی سیستم کنترل شود. البته حتی با وجود چنین مکانیسمی، خطاهای کوچک میتوانند در طول مسیر انباشته شوند. برای حل این مشکل، نویسندگان از ماژول تشخیص حلقه و بهینهسازی گراف موقعیت بهره بردهاند. به محض اینکه ربات به یک مکان قبلی بازگردد، شباهت تصاویر فعلی با تصاویر ذخیرهشده بررسی شده و در صورت تشخیص حلقه، قیدهای جدیدی به گراف موقعیت اضافه میشوند. اجرای بهینهسازی روی این گراف باعث میشود خطاهای تجمعی در مقیاس بزرگ اصلاح گردند و مسیر کلی ربات بدون Drift باقی بماند.
یکی دیگر از نکات برجسته روش پیشنهادی، طراحی مجموعهای از استراتژیهای پایداری است که مانع از ناپایداریهای رایج Sliding Window میشوند. بهطور مشخص، زمانی که دادههای مارکر قابل دسترس نباشند، سیستم بخشی از وضعیتها را ثابت نگه میدارد تا از واگرایی جلوگیری شود. همچنین در مراحل آغازین، مقادیر اولیه حالتها بهطور هوشمندانه با استفاده از هندسه دیداری و همترازسازی با دادههای IMU انتخاب میشوند تا الگوریتم از ابتدا در نقطهای مناسب شروع شود و در کمینههای محلی گرفتار نشود. علاوه بر این، هر داده مارکر قبل از ورود به فرآیند بهینهسازی از نظر اعتبار بررسی میشود تا دادههای نویزی یا اشتباه سیستم را دچار بیثباتی نکنند.
به این ترتیب، روش پیشنهادی مقاله یک چرخه کامل و منسجم را ارائه میدهد که از جمعآوری دادهها آغاز میشود، از طریق پردازش و پیشیکپارچهسازی و سپس بهینهسازی لغزشی ادامه مییابد، و در نهایت با مکانیزمهای کلیدفریم، Marginalization و تشخیص حلقه تکمیل میشود. نتیجهی این زنجیره، سیستمی است که قادر است در محیطهای سخت صنعتی، دقت و پایداری مکانیابی را تضمین کند و ربات را از Drift و خطاهای رایج در روشهای سنتی برهاند.
پیادهسازی و ارزیابی عملکرد
برای بررسی عملیاتی بودن چارچوب پیشنهادی، نویسندگان آن را روی یک ربات متحرک واقعی در محیطهای صنعتی آزمایش کردهاند. محیطهای انتخابشده عمداً از نوع ضعیفبافت و دارای بازتابهای شدید بودهاند؛ شرایطی که بهطور معمول باعث میشود الگوریتمهای کلاسیک VIO کارایی خود را از دست بدهند. برای ثبت دادهها، یک دوربین استریو MYNTEYE D1000 با زاویه دید گسترده و نرخ ۲۰ هرتز به همراه یک واحد IMU پرسرعت BMI088 با فرکانس ۲۰۰ هرتز روی ربات نصب شد. همچنین دادهها بر روی یک رایانه صنعتی Intel NUC با پردازنده i7 پردازش شدند تا عملکرد الگوریتم در شرایط نزدیک به کاربردهای واقعی سنجیده شود. این انتخاب نشان میدهد که پژوهش تنها در محیطهای شبیهسازی یا پردازشهای آفلاین انجام نشده، بلکه در بستری نزدیک به واقعیت صنعتی آزمایش شده است.
در آزمایشها، ربات مسیرهای از پیش تعیینشده را بارها تکرار کرد تا پایداری و دقت الگوریتم ارزیابی شود. مقایسهی اصلی میان سیستم پیشنهادی و الگوریتم شناختهشدهی VINS-Fusion انجام گرفت که یکی از قویترین چارچوبهای VIO در جامعه علمی محسوب میشود. نتایج نشان داد که VINS-Fusion در محیطهای کمبافت بهسرعت دچار Drift میشود، بهویژه در راستای محور عمودی (z-axis) که باید مقدار ثابتی حفظ میکرد. در مقابل، الگوریتم پیشنهادی توانست مقدار z را در یک محدوده پایدار نگه دارد و Drift تجمعی را مهار کند. این موضوع نشان میدهد که اضافه شدن قیدهای چندمارکری در کنار بهینهسازی لغزشی تأثیری مستقیم بر کاهش خطا دارد و باعث میشود سیستم حتی در طولانیترین آزمایشها از مسیر واقعی منحرف نشود.
نتایج کمی نیز این برتری را تأیید کردند. در مجموعه دادههای کوتاهمدت (حدود ۳۲۰ ثانیه)، الگوریتم VINS-Fusion دچار خطاهای تجمعی آشکار در موقعیت و زاویه شد، در حالیکه روش پیشنهادی مسیر تکرارشدهی ربات را تقریباً بدون Drift بازسازی کرد. در آزمایشهای طولانیمدتتر (حدود ۲۲۰۰ ثانیه)، اختلاف میان دو روش حتی برجستهتر شد: سیستم کلاسیک VIO خطاهای بزرگی در طول مسیر انباشته کرده بود، در حالی که روش ترکیبی مقاله توانست خطای انباشته را کنترل کرده و موقعیت ربات را با دقت بالا حفظ کند. این نتایج با استفاده از نمودارهای خطا در مختصات X، Y و Z به تصویر کشیده شده و نشان میدهد که الگوریتم جدید هم در مقیاس زمانی کوتاه و هم در مسیرهای طولانیمدت برتری قابلتوجهی دارد.
نکته مهم دیگر، قابلیت الگوریتم در مواجهه با شرایط واقعی صنعتی بود. تصاویر ثبتشده از محیط نشان میداد که سطح کفها براق و بدون بافت بوده و نور محیطی نیز یکنواخت و ضعیف است. در چنین شرایطی، ردیابی ویژگیهای تصویری بهسختی انجام میشود و در بسیاری از موارد تعداد نقاط قابلاعتماد برای ردیابی بهطور چشمگیری کاهش مییافت. با این حال، اضافه شدن دادههای مارکر و قیدهای بازپراکنش چندفریمی موجب شد سیستم بتواند همچنان موقعیت ربات را با دقت بالا محاسبه کند. به بیان دیگر، جایی که الگوریتمهای کلاسیک به بنبست میرسیدند، روش پیشنهادی مسیر را ادامه میداد. این همان چیزی است که صنعت به آن نیاز دارد: پایداری و اعتمادپذیری حتی در شرایط غیرایدهآل.
از دید صنعتی، این نتایج یک پیام روشن دارند. سیستم پیشنهادی نهتنها از نظر دقت علمی برتر است، بلکه از نظر عملیاتی نیز توانسته نشان دهد که میتواند روی سختافزار واقعی، در زمان واقعی و در محیطهای صنعتی پیچیده اجرا شود. به همین دلیل، میتوان آن را یک گام مهم به سمت بهکارگیری عملی رباتهای خودران در انبارها، کارخانهها و محیطهای پرچالش دانست.
کاربردهای صنعتی و سناریوهای واقعی
یکی از مهمترین حوزههای کاربرد این فناوری، انبارداری و لجستیک هوشمند است. در انبارهای بزرگ و مراکز توزیع، رباتهای خودران باید در راهروهای باریک حرکت کرده، محمولهها را جابهجا کنند و با انسانها و تجهیزات دیگر تعامل داشته باشند. چنین محیطهایی اغلب پر از سطوح صاف و بدون بافتاند که الگوریتمهای کلاسیک VIO در آنها بهسرعت دچار خطا میشوند. اما با استفاده از روش پیشنهادی مقاله، ربات میتواند حتی در چنین فضاهایی موقعیت خود را با دقت حفظ کند و جریان مواد را بدون وقفه مدیریت نماید. این موضوع به کاهش خطاهای عملیاتی و افزایش بهرهوری زنجیره تأمین منجر میشود.
در صنایع سنگین مانند کارخانههای فولاد، معادن و پتروشیمی، شرایط محیطی بهگونهای است که GPS عملاً غیرقابلاعتماد است. وجود سازههای فلزی عظیم، ماشینآلات فعال و شرایط نوری سخت باعث میشود که بسیاری از سیستمهای مکانیابی شکست بخورند. در اینجا فناوری فیوژن تصویری–اینرسی–مارکری میتواند به رباتها امکان دهد با پایداری بالا در چنین محیطهای خشن حرکت کنند. توانایی عبور از شرایط بازتابی و بافتکم به معنای افزایش ایمنی و کاهش وابستگی به نیروی انسانی در محیطهای پرخطر است.
سناریوی دیگر مربوط به بازرسی و نگهداری خودکار در تأسیسات پیچیده است. رباتهای بازرسی باید مسیرهای طولانی را طی کنند و بهطور مداوم وضعیت تجهیزات را پایش کنند. خطای تجمعی در مکانیابی میتواند باعث شود که دادههای جمعآوریشده غیرقابلاستفاده شوند یا نقاط بازرسی بهاشتباه پوشش داده نشوند. با بهکارگیری این الگوریتم، ربات قادر خواهد بود در طول بازههای زمانی طولانی، موقعیت خود را بدون Drift حفظ کرده و دادههای بازرسی دقیق و قابلاعتماد ارائه دهد. این موضوع به صنایع کمک میکند تا هزینههای نگهداری کاهش یافته و ایمنی پرسنل افزایش یابد.
همچنین بنادر و پایانههای کانتینری یکی از محیطهای ایدهآل برای بهرهبرداری از این فناوری هستند. تراکم بالای کانتینرها، سازههای فلزی و جرثقیلهای مرتفع معمولاً باعث اختلال در GPS میشوند و سیستمهای کلاسیک مکانیابی را ناکارآمد میکنند. رباتهای مجهز به این فناوری میتوانند در مسیرهای باریک بین کانتینرها حرکت کرده، محمولهها را جابهجا کنند و عملیات بندری را با دقت و سرعت بیشتری انجام دهند. این به معنای کاهش زمان تخلیه و بارگیری و افزایش کارایی لجستیک دریایی است.
در نهایت، این فناوری میتواند در شهرهای هوشمند و پروژههای عمرانی نیز کاربرد داشته باشد. رباتهای خدماتی یا پیمانکاران خودکار در محیطهای پیچیده شهری، مانند تونلها، پلها یا ساختمانهای بلند، معمولاً با مشکل قطع GPS روبهرو هستند. به کمک این رویکرد، چنین رباتهایی میتوانند بدون نیاز به زیرساختهای اضافی، مسیر خود را دقیق دنبال کنند و خدمات متنوعی از حملونقل خودکار گرفته تا پایش ایمنی زیرساختها ارائه دهند.
به این ترتیب، فناوری معرفیشده در مقاله نهتنها یک دستاورد پژوهشی، بلکه یک ابزار عملی برای طیفی گسترده از صنایع است. از انبارهای کوچک تا کارخانههای سنگین و بنادر بزرگ، همه میتوانند از مزیت مکانیابی پایدار و دقیق بدون وابستگی به GPS بهرهمند شوند.
جمعبندی استراتژیک و مزیتهای رقابتی
بررسی دستاوردهای این مقاله نشان میدهد که فناوری فیوژن تصویری–اینرسی–مارکری بر پایهی بهینهسازی لغزشی، نهتنها یک پیشرفت فنی بلکه یک مزیت استراتژیک برای صنایع آینده است. نخستین مزیت در پایداری عملیاتی نهفته است. رباتهایی که از این فناوری استفاده میکنند دیگر وابسته به شرایط ایدهآل نوری یا سیگنال GPS نیستند. این استقلال به سازمانها اجازه میدهد که بدون نیاز به زیرساختهای اضافی یا هزینههای سنگین نشانهگذاری محیط، عملیات خودکار را در هر شرایطی پیش ببرند. چنین سطحی از خودکفایی بهویژه در صنایع سنگین که توقف تولید هزینههای هنگفتی دارد، یک عامل رقابتی تعیینکننده خواهد بود.
مزیت دوم، دقت و قابلیت اعتماد در محیطهای دشوار است. همانطور که آزمایشها نشان داد، این الگوریتم توانسته است Drift تجمعی را مهار کند و حتی در مسیرهای طولانی، خطای موقعیت را در سطح قابلقبولی نگه دارد. این یعنی دادههای جمعآوریشده توسط رباتها – چه برای حملونقل باشد چه برای بازرسی – همواره معتبر و قابل اتکا هستند. برای صنایع، چنین قابلیتی به معنای کاهش خطاهای عملیاتی، افزایش بهرهوری و ارتقای سطح ایمنی است؛ مزایایی که مستقیماً در سودآوری و اعتبار سازمان منعکس میشوند.
مزیت سوم در انعطافپذیری و سازگاری گسترده این رویکرد است. برخلاف بسیاری از فناوریهای ناوبری که تنها در محیطهای ساختارمند مانند انبارها یا خطوط تولید قابل استفادهاند، این چارچوب در طیف وسیعی از سناریوها – از کارخانههای فولاد و معادن گرفته تا بنادر و شهرهای هوشمند – کارایی دارد. این قابلیت چندمنظوره به شرکتها امکان میدهد یک راهحل واحد را در بخشهای مختلف خود به کار بگیرند و هزینه توسعه و نگهداری چند سیستم موازی را حذف کنند.
از دیدگاه کلان، این فناوری میتواند یک مزیت رقابتی جهانی برای سازمانهایی باشد که بهدنبال پیادهسازی Industry 4.0 هستند. بازار رباتهای خودران و سیستمهای SLAM بهسرعت در حال رشد است و شرکتهایی که زودتر به فناوریهای دقیق و پایدار بدون GPS روی بیاورند، قادر خواهند بود خدمات و محصولات خود را با سطحی از اعتمادپذیری عرضه کنند که رقبا بهراحتی به آن دسترسی ندارند. در نتیجه، این انتخاب نه یک لوکس فناورانه، بلکه یک ضرورت استراتژیک برای بقا و پیشرفت در بازار جهانی محسوب میشود.
در نهایت، میتوان گفت مقاله با معرفی این چارچوب نهتنها به یک پرسش علمی پاسخ داده، بلکه یک مسیر روشن برای مدیران صنعتی ترسیم کرده است: اگر هدف شما اتوماسیون پایدار، ایمن و مقیاسپذیر است، باید به سمت راهکارهای فیوژن چندسنسوری مبتنی بر بهینهسازی لغزشی حرکت کنید. این همان تغییری است که امروز مزیت رقابتی و فردا استاندارد جهانی خواهد بود.
نتیجهگیری، دعوت به اقدام و رفرنس
آنچه در این مقاله ارائه شد نشان میدهد که آیندهی مکانیابی رباتهای خودران در محیطهای صنعتی به سمت فیوژن چندسنسوری هوشمند حرکت میکند. ترکیب دادههای دوربین، IMU و مارکرهای دیداری در قالب یک چارچوب بهینهسازی لغزشی توانسته است یکی از اساسیترین مشکلات سیستمهای کلاسیک یعنی Drift تجمعی را مهار کند. نتایج تجربی نشان دادند که این الگوریتم حتی در شرایطی که محیط فاقد بافت، دارای بازتاب یا کمنور است، قادر است موقعیت ربات را با دقت بالا حفظ کند. این دستاورد به معنای آن است که سازمانها دیگر محدود به محیطهای ایدهآل یا زیرساختهای پرهزینه نیستند، بلکه میتوانند اتوماسیون واقعی را در محیطهای متنوع و چالشبرانگیز پیادهسازی کنند.
پیام این پژوهش برای صنعت روشن است: اگر هدف شما افزایش بهرهوری، کاهش هزینههای عملیاتی و تضمین ایمنی در مقیاس بزرگ است، باید به سمت سیستمهای مکانیابی پیشرفته و مستقل از GPS حرکت کنید. سازمانهایی که زودتر به این فناوریها مجهز شوند، نهتنها از رقبا جلو خواهند زد، بلکه زیرساختی پایدار برای ورود به عصر Industry 4.0 ایجاد میکنند.
دعوت به اقدام (Call to Action)
مدیران و تصمیمگیران صنعتی امروز باید این پرسش را جدی بگیرند: «آیا رباتهای ما آمادهاند که بدون وابستگی به GPS و در شرایط سخت محیطی، با دقت و اعتمادپذیری کامل کار کنند؟» پاسخ به این پرسش، آینده جایگاه شما در رقابت جهانی را تعیین خواهد کرد. گامهای عملی شامل آزمایش این فناوری در پروژههای پایلوت، سرمایهگذاری در سیستمهای فیوژن چندسنسوری و بهکارگیری رباتهای مجهز به الگوریتمهای Sliding Window Optimization است. آنچه امروز یک نوآوری پژوهشی محسوب میشود، فردا به یک استاندارد صنعتی بدل خواهد شد.
رفرنس مقاله
Zhang, M., Han, S., Liu, X., Wang, S., Han, L., & Zhao, J. (2021). Visual-Marker-Inertial Fusion Localization System Using Sliding Window Optimization. 2021 33rd Chinese Control and Decision Conference (CCDC). IEEE. DOI: 10.1109/CCDC52312.2021.9602344



{kind=link}
بدون نظر