

هوش اجتماعی در رباتهای حمل بار خودکار: از همکاری میانرباتی تا تصمیمگیری جمعی در شبکههای صنعتی
در کارخانههای مدرن، مراکز توزیع هوشمند و انبارهای رباتیک، دیگر خبری از رباتهای منفردی نیست که صرفاً طبق مسیرهای از پیش تعیینشده حرکت کنند. نسل جدیدی از رباتهای حمل بار، موسوم به رباتهای خودکار اجتماعی (Socially Intelligent Autonomous Robots) در حال ظهور است؛ سامانههایی که نهفقط مسیر خود را میشناسند، بلکه رفتار دیگر رباتها را نیز درک میکنند، با آنها ارتباط برقرار مینمایند و تصمیمهای خود را در هماهنگی با کل شبکه اتخاذ میکنند. در واقع، این رباتها از سطح «خودمختاری حرکتی» عبور کرده و وارد مرحلهی خودمختاری اجتماعی و تعاملی شدهاند — مرحلهای که در آن همکاری، اعتماد و همافزایی میانرباتی به همان اندازهی دقت ناوبری اهمیت دارد.
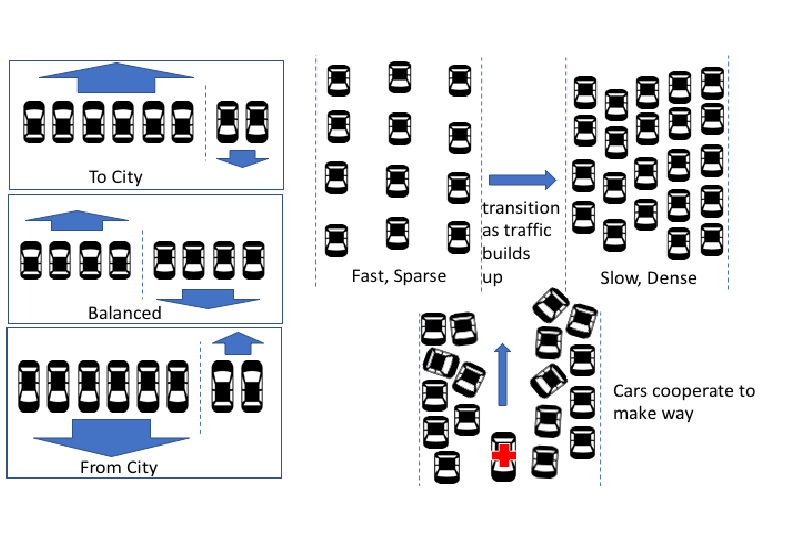
در محیطهای صنعتی امروزی، صدها ربات AMR و AGV در یک فضای مشترک کار میکنند؛ بعضی در حال جابهجایی پالتهای سنگین، برخی در حال تأمین قطعات برای خطوط مونتاژ و برخی در حال بازگرداندن سبدهای خالی به ایستگاههای بارگیری. در چنین شرایطی، تنها داشتن حسگرهای دقیق و مسیرهای بهینه کافی نیست. آنچه تفاوت میان یک سیستم کارآمد و یک شبکهی پرخطر را رقم میزند، توانایی هر ربات در درک رفتار دیگر رباتها و پیشبینی نیت حرکتی آنهاست. درست همانطور که رانندگان ماهر در جاده از زبان حرکات یکدیگر منظور را میفهمند، رباتهای خودکار اجتماعی نیز باید بتوانند از دادههای محیطی و رفتاری برای پیشبینی واکنش همکارانشان استفاده کنند.
اینجا مفهوم «هوش اجتماعی» در رباتهای حمل بار معنا پیدا میکند. برخلاف هوش مصنوعی سنتی که بر پردازش داده و تصمیمگیری فردی تمرکز دارد، هوش اجتماعی بر تعامل، هماهنگی، یادگیری متقابل و تصمیمگیری جمعی استوار است. در این مدل، هر ربات بخشی از یک اکوسیستم فکری بزرگتر است؛ شبکهای که در آن اطلاعات نه از یک مرکز فرماندهی بلکه از طریق تعاملات پیوسته میان اعضا گردش میکند. در نتیجه، تصمیمات از سطح فردی به سطح جمعی ارتقا مییابد و کل سیستم رفتار یکپارچهای از خود نشان میدهد — رفتاری که از بیرون بهصورت نظم هوشمند دیده میشود، اما از درون، نتیجهی میلیونها تصمیم محلی و تعامل لحظهای است.
در چنین ساختاری، رباتها دیگر نه بهعنوان ابزار، بلکه بهعنوان «عاملان اجتماعی» در اکوسیستم صنعتی دیده میشوند. آنها میتوانند اولویتها را با یکدیگر هماهنگ کنند، منابع را بهصورت مشارکتی تقسیم نمایند، از رفتار یکدیگر یاد بگیرند و حتی تصمیمهای گروهی اتخاذ کنند. برای مثال، در محیطی که چندین AGV در مسیر باریک حرکت میکنند، هر ربات میتواند بر اساس دادههای حرکتی همسایگانش تصمیم بگیرد که آیا باید مسیر را تغییر دهد، سرعت را تنظیم کند یا لحظهای توقف کند تا ترافیک روان بماند. چنین رفتارهایی، که پیشتر فقط در سیستمهای زنده یا شبکههای اجتماعی انسانی دیده میشدند، اکنون به دنیای رباتهای صنعتی وارد شدهاند.
این گذار از هوش مصنوعی منفرد به هوش اجتماعی جمعی، تحولی عمیق در مفهوم «ربات هوشمند» ایجاد کرده است. اکنون دیگر هدف تنها طراحی رباتی نیست که بتواند حرکت کند یا مانعی را تشخیص دهد، بلکه طراحی سیستمی است که بتواند درک کند، تعامل داشته باشد و همکاری کند. همین تغییر دیدگاه، زیربنای توسعهی نسل جدید رباتهای حمل بار هوشمند را شکل میدهد؛ رباتهایی که نه در انزوا، بلکه در همکاری مداوم با یکدیگر به بالاترین سطح بهرهوری، ایمنی و پایداری عملیاتی میرسند.
در واقع، مقالهی حاضر بهخوبی نشان میدهد که مسیر آیندهی صنعت رباتیک در جهت اجتماعی شدن ماشینها است — یعنی ماشینهایی که بهجای رقابت، با هم همکاری میکنند و بهجای پیروی از دستور، از رفتار جمعی الهام میگیرند. این همان فلسفهای است که مرز میان هوش مصنوعی، رباتیک و علوم رفتاری را از میان برداشته و راه را برای ظهور «شبکههای صنعتی اجتماعی» هموار کرده است؛ شبکههایی که در آن هر ربات، عضوی از یک جامعهی صنعتی زنده است.
چالشهای فعلی در همکاری میانرباتی و محدودیتهای سیستمهای غیراجتماعی
با وجود رشد چشمگیر فناوری در حوزهی رباتهای حمل بار خودکار، بیشتر سیستمهای کنونی همچنان بر پایهی خودمختاری فردی و تصمیمگیری مستقل طراحی شدهاند. این یعنی هر ربات صرفاً بر اساس دادههای حسگر خود، مسیر، سرعت و رفتار حرکتیاش را تعیین میکند، بیآنکه از قصد یا وضعیت دیگر رباتها آگاه باشد. در نگاه اول این استقلال تصمیمگیری یک مزیت است، اما در محیطهای صنعتی واقعی که دهها یا صدها ربات در فضاهای مشترک کار میکنند، همین ویژگی میتواند منبع ناهماهنگی، برخورد، ازدحام و کاهش بهرهوری شود. واقعیت این است که یک ربات تنها، هرچقدر هم دقیق و مجهز باشد، بدون درک رفتار جمعی و نیت حرکتی دیگر اعضا نمیتواند در محیطی شلوغ عملکردی پایدار و ایمن داشته باشد.
در انبارهای بزرگ یا خطوط تولید خودکار، حرکت همزمان چندین AMR در مسیرهای محدود و اشتراکی امری اجتنابناپذیر است. هر ربات ممکن است در مسیر مأموریت خود با چند ربات دیگر برخورد دیداری پیدا کند، مسیرش با مسیر دیگران تلاقی داشته باشد یا مجبور شود برای عبور از یک منطقه، اولویت خود را با دیگران هماهنگ کند. در سیستمهای غیراجتماعی، هیچ مکانیزم ذاتی برای این هماهنگی وجود ندارد. در نتیجه، تصمیمگیریهای لحظهای ممکن است با تصمیم سایر رباتها در تضاد باشد؛ پدیدهای که در عمل منجر به بنبست، توقف متقابل یا حتی برخورد میشود. این ناهماهنگی نهتنها کارایی سیستم را کاهش میدهد، بلکه با افزایش تعداد رباتها بهصورت تصاعدی تشدید میشود.
یکی از چالشهای اساسی دیگر، نبود ارتباط میانرباتی معنادار (Meaningful Inter-Robot Communication) است. در بسیاری از سیستمهای موجود، ارتباط رباتها صرفاً در سطح تبادل دادهی خام محدود است — مانند موقعیت مکانی یا وضعیت حسگر. اما در یک محیط پویا، چنین ارتباطی کافی نیست. برای شکلگیری همکاری واقعی، رباتها باید بتوانند از طریق زبان مشترک تصمیمگیری، «درک رفتاری» از یکدیگر پیدا کنند؛ یعنی بتوانند نیت حرکتی، اولویت مأموریت و سطح اطمینان تصمیمهای همتیمیهایشان را بفهمند. بدون این درک، هر ربات صرفاً به عنوان یک نقطهی متحرک برای دیگری دیده میشود، نه به عنوان یک شریک هوشمند در یک مأموریت مشترک. این ناتوانی در ادراک متقابل همان چیزی است که در ادبیات فنی با عنوان فقدان هوش اجتماعی میانرباتی از آن یاد میشود.
چالش بعدی به مسئلهی ادراک مشترک (Shared Perception) برمیگردد. در سیستمهای کنونی، هر ربات بر اساس حسگرهای خودش تصویر خاصی از محیط دارد. اما محیط صنعتی، بهویژه در مقیاس بزرگ، آنقدر پیچیده و پویاست که هیچ حسگر منفردی نمیتواند دید کاملی از آن ارائه دهد. در نتیجه، تصمیمات مبتنی بر دادههای ناقص گرفته میشوند و این موضوع باعث بروز رفتارهای غیرمنسجم در شبکهی رباتها میشود. اگر یکی از رباتها مانعی را تشخیص دهد و دیگری بهدلیل زاویهی دید متفاوت از وجود آن بیخبر بماند، سیستم در معرض خطر برخورد یا توقف ناگهانی قرار میگیرد. ایجاد درکی مشترک از محیط، یعنی توانایی تلفیق دادههای حسگرهای متعدد در میان اعضا، چالشی جدی است که بدون معماری هوش اجتماعی ممکن نیست.
یکی دیگر از نقاط ضعف سیستمهای غیراجتماعی، عدم وجود منطق جمعی در تصمیمگیری استراتژیک است. هر ربات در چنین سیستمهایی صرفاً در پی انجام مأموریت خود است، بیآنکه پیامد رفتار خود را بر عملکرد کل شبکه بسنجد. نتیجه، مجموعهای از تصمیمهای بهظاهر بهینه اما در مجموع ناکارآمد است. برای مثال، ممکن است چند ربات بهصورت همزمان به سمت یک ایستگاه بارگیری حرکت کنند، چون هرکدام آن را نزدیکترین مقصد میدانند. اما در سطح شبکه، این رفتار باعث ترافیک موضعی و افت سرعت کلی میشود. چنین تضادهایی تنها زمانی برطرف میشوند که رباتها بتوانند در سطح جمعی مذاکره کنند و به توافقهای رفتاری برسند — فرآیندی که در قلب مفهوم هوش اجتماعی میانرباتی نهفته است.
از سوی دیگر، محیطهای صنعتی مدرن اغلب شامل تعامل انسان و ربات (Human–Robot Interaction) هستند. در چنین محیطهایی، رفتار اجتماعی رباتها اهمیت دوچندان پیدا میکند. اگر ربات نتواند رفتار انسان را پیشبینی کند یا واکنش خود را به شکلی قابل درک و سازگار با انسان تنظیم نماید، احتمال بروز خطا یا ناایمنی افزایش مییابد. به همین دلیل، رباتهای آینده باید نهتنها نسبت به دیگر رباتها، بلکه نسبت به رفتار انسانی نیز حساس و سازگار باشند — ویژگیای که تنها از طریق یادگیری اجتماعی و تعامل مداوم میان عوامل حاصل میشود.
در نهایت، بزرگترین محدودیت سیستمهای غیراجتماعی در نبود یادگیری جمعی (Collective Learning) نهفته است. در این سیستمها، هر ربات تجارب خود را در خلأ میاندوزد و هیچ مکانیزمی برای انتقال تجربه یا بهبود گروهی وجود ندارد. این یعنی هر بار که سیستم با موقعیت جدیدی مواجه میشود، باید از صفر یاد بگیرد. در مقابل، در یک شبکهی اجتماعی هوشمند، دانش و تجربه میان اعضا به اشتراک گذاشته میشود و کل سیستم در گذر زمان با سرعتی تصاعدی یاد میگیرد و تکامل مییابد. این همان تفاوت میان «خودکار بودن» و «خودهوشمند بودن» است — تفاوتی که مرز میان نسل فعلی رباتها و رباتهای آینده را تعیین میکند.
در مجموع، چالشهای همکاری میانرباتی در محیطهای صنعتی نتیجهی مستقیم نبود هوش اجتماعی در طراحی سیستمهای کنونی است. مقالهی حاضر دقیقاً با هدف پاسخ به همین نیاز تدوین شده و نشان میدهد که برای گذار از خودمختاری فردی به خودمختاری جمعی، باید ساختارهای ارتباطی، تصمیمگیری و یادگیری میانرباتی از نو تعریف شوند. تنها در این صورت است که رباتهای حمل بار میتوانند از مجموعهای از عاملهای مجزا به یک جامعهی هماهنگ، پویا و هوشمند تبدیل شوند — جامعهای که در آن همکاری، بهینهسازی و رشد، نه یک ویژگی اضافه، بلکه ذات سیستم خواهد بود.
دیدگاه نوآورانه و مفهوم هوش اجتماعی در رباتهای صنعتی
تحول اصلی که مقاله بر آن تأکید میکند، گذار از هوش مصنوعی محاسباتی به هوش اجتماعی صنعتی است — جهشی از رباتهایی که صرفاً میبینند و میفهمند، به رباتهایی که تعامل میکنند، پیشبینی دارند و همکاری را میآموزند. در سیستمهای جدید مبتنی بر هوش اجتماعی، رباتها دیگر تنها عاملهای واکنشی نیستند، بلکه مانند اعضای یک جامعه، رفتار خود را بر اساس تعامل و یادگیری متقابل تنظیم میکنند. این تحول باعث میشود که شبکهی رباتهای حمل بار خودکار از یک ساختار صرفاً عملکردی به یک ساختار «ادراکی–اجتماعی» تبدیل شود؛ جایی که تصمیمها نه بهصورت دستوری از مرکز، بلکه بهصورت خودسازمانده و از درون جمع اتخاذ میشوند.
هوش اجتماعی در این چارچوب، صرفاً به معنی ارتباط میانرباتی نیست، بلکه به توانایی رباتها برای درک نیت، هدف و محدودیتهای یکدیگر اشاره دارد. هر ربات در این مدل، وضعیت حرکتی و تصمیمهای احتمالی سایر رباتها را تحلیل میکند و بر اساس آن مسیر خود را بازتنظیم مینماید. این یعنی رباتها از سطح تبادل داده فراتر میروند و وارد سطح «درک رفتاری» میشوند. درست همانطور که انسانها در یک محیط کاری با مشاهدهی حرکات و نشانههای رفتاری دیگران، تصمیمهای خود را هماهنگ میکنند، رباتهای هوشمند اجتماعی نیز از دادههای محیطی و ارتباطات بلادرنگ برای پیشبینی رفتار همکارانشان استفاده میکنند.
یکی از نکات کلیدی مقاله، معرفی مفهوم “Social Perception Layer” است — لایهای نرمافزاری که بین حسگرها و سیستم تصمیمگیری قرار میگیرد و نقش تفسیر اجتماعی دادهها را ایفا میکند. این لایه به ربات کمک میکند تا دادههای خام حسگر را نه صرفاً بهعنوان موانع فیزیکی، بلکه بهعنوان «علائم رفتاری» تحلیل کند. بهطور مثال، اگر ربات دیگری در حال کاهش سرعت باشد، سیستم آن را بهعنوان نشانهای از قصد تغییر مسیر یا عبور عامل انسانی تفسیر میکند. این نوع درک، پایهی رفتار اجتماعی هوشمند در رباتهای صنعتی است، زیرا به آنها توانایی میدهد به جای واکنش مکانیکی، تصمیمهای پیشبینانه بگیرند.
مقاله همچنین ساختاری سهلایه برای پیادهسازی هوش اجتماعی در رباتهای حمل بار پیشنهاد میکند که شامل ادراک اجتماعی (Social Perception)، تصمیمگیری جمعی (Collective Decision-Making) و یادگیری متقابل (Mutual Learning) است. در لایهی ادراک، رباتها محیط را از دیدگاه جمعی تفسیر میکنند؛ در لایهی تصمیمگیری، گزینهها را با توجه به وضعیت دیگران ارزیابی مینمایند؛ و در لایهی یادگیری، رفتار خود را با توجه به بازخورد سیستم بهبود میدهند. این چرخهی سهگانه باعث میشود که کل ناوگان بهصورت خودسازمانده رشد کند و در هر مأموریت جدید، رفتار بهینهتری از خود نشان دهد.
نوآوری دیگر در این مقاله، استفاده از مفهوم “Social Reward” است — نوعی سازوکار انگیزشی که هر ربات را تشویق میکند تصمیمهایی بگیرد که نهفقط برای خودش، بلکه برای کل گروه مفید باشند. در سیستمهای سنتی، معیار بهینهسازی بر پایهی کمینهسازی زمان مأموریت یا انرژی فردی است، اما در مدل اجتماعی، شاخص عملکرد جمعی (Group Efficiency) ملاک ارزیابی است. به بیان دیگر، رباتی که اندکی از مسیر خود صرفنظر کند تا جریان کلی حرکت روانتر شود، از دید سیستم، «باهوشتر» محسوب میشود. این تغییر در منطق تصمیمگیری همان چیزی است که رفتار اجتماعی پایدار را در ناوگانهای صنعتی ممکن میسازد.
نویسندگان مقاله توضیح میدهند که هوش اجتماعی میان رباتها نه یک قابلیت مجزا، بلکه زیرساخت ذهن جمعی سیستمهای صنعتی آینده است. در چنین سیستمی، دیگر نیازی به هماهنگی بیرونی یا زمانبندی از سوی انسان وجود ندارد. هر ربات میداند چه زمانی باید پیشروی کند، چه زمانی باید منتظر بماند، و چگونه باید رفتار خود را با دیگران هماهنگ سازد. این همان مفهوم “Emergent Cooperation” است — همکاریای که از پایینترین سطح تصمیمگیری (رفتار فردی) ظهور میکند، اما در سطح کل شبکه به شکلی منظم و هوشمند نمایان میشود.
از منظر مهندسی سیستم، این مدل اجتماعی چند مزیت مهم ایجاد میکند. نخست، کاهش بار ارتباطی شبکه؛ چون اطلاعات بهصورت محلی تبادل میشوند و دیگر نیازی به ارسال دادههای حجیم به مرکز وجود ندارد. دوم، افزایش تابآوری سیستم در برابر خطا یا خرابی؛ چون در صورت از کار افتادن بخشی از رباتها، بقیه همچنان قادر به ادامهی کار جمعی هستند. و سوم، انعطافپذیری طبیعی در مواجهه با تغییرات محیطی؛ چون تصمیمگیری اجتماعی بهطور ذاتی پویاست و خودش را با وضعیت جدید وفق میدهد.
اما شاید مهمترین نوآوری مقاله، تأکید بر این نکته است که هوش اجتماعی در رباتها یک ویژگی نرمافزاری نیست، بلکه یک رفتار تکاملی است. یعنی این قابلیت در طول زمان و از طریق تعامل، یادگیری و اصلاح رفتار میان اعضا رشد میکند. رباتها در ابتدا ممکن است صرفاً از قواعد سادهی هماهنگی پیروی کنند، اما با گذر زمان و تکرار مأموریتها، الگوهای همکاری پیچیدهتری شکل میگیرد که از کنترل مستقیم طراحان فراتر میرود. این یعنی سیستم در مسیر تکامل رفتاری حرکت میکند — درست مانند جوامع زنده که از تعامل ساده آغاز و به رفتارهای پیشرفتهی جمعی میرسند.
در نهایت، میتوان گفت مقاله با طرح مفهوم هوش اجتماعی در رباتهای صنعتی، مرز میان الگوریتم و رفتار را بازتعریف کرده است. در این دیدگاه، رباتهای AMR و AGV دیگر صرفاً ابزارهایی برای حمل بار نیستند، بلکه اعضای هوشمند یک جامعهی صنعتیاند که با تعامل، گفتگو، یادگیری و همافزایی به هدف مشترک — پایداری، بهرهوری و ایمنی — دست مییابند. این همان تغییری است که آیندهی اتوماسیون را از مهندسی مکانیکی به مهندسی اجتماعی صنعتی سوق میدهد؛ صنعتی که در آن، رباتها نه تنها کار میکنند، بلکه با هم فکر میکنند.
روش پیشنهادی مقاله و ساختار گامبهگام پیادهسازی هوش اجتماعی در رباتهای AMR و AGV
در معماری پیشنهادی مقاله، مفهوم هوش اجتماعی در قالب یک ساختار چندلایه تعریف شده که هدف آن تبدیل شبکهای از رباتهای مستقل به یک جامعهی خودتنظیم و همکار است. نویسندگان مقاله بهجای آنکه بر یک الگوریتم واحد برای هماهنگی تمرکز کنند، رویکردی سیستماتیک ارائه دادهاند که در آن ادراک، تعامل، تصمیمگیری و یادگیری به صورت چرخهای و مداوم در جریان است. این ساختار بهگونهای طراحی شده که هر ربات بتواند بهطور مستقل دادههای محیطی را تحلیل کند، رفتار سایر رباتها را تفسیر نماید، در مورد مسیر یا اقدام بعدی تصمیم بگیرد و در نهایت، از بازخورد جمعی برای بهبود عملکرد خود استفاده کند.
در گام نخست، لایهی ادراک اجتماعی (Social Perception Layer) وظیفه دارد دادههای خام حسگرها را به اطلاعات رفتاری قابلفهم تبدیل کند. در این مرحله، هر ربات نهفقط موانع فیزیکی بلکه سایر رباتها و انسانهای حاضر در محیط را به عنوان «عاملهای اجتماعی» شناسایی میکند. دادههایی مانند جهت حرکت، شتاب، فاصلهی نسبی و سرعت سایر اعضا تحلیل میشوند تا تصویری پویا از نیت حرکتی و رفتار آیندهی آنها ساخته شود. برای مثال، اگر رباتی در حال کاهش سرعت یا چرخش جزئی باشد، سیستم این تغییر را بهعنوان نشانهای از تصمیم برای تغییر مسیر یا اجتناب از برخورد تعبیر میکند و رباتهای اطراف بر اساس آن رفتار خود را هماهنگ میکنند.
در گام دوم، اطلاعات حاصل از ادراک اجتماعی وارد لایهی تعامل و ارتباط میانرباتی (Interaction and Communication Layer) میشود. در این لایه، ارتباطات محلی و کوتاهبرد میان رباتها برقرار است؛ یعنی هر ربات تنها با همسایگان نزدیک خود در شعاع کاری مشخص تبادل اطلاعات دارد. این معماری باعث میشود که بار ارتباطی سیستم کاهش یابد و همزمان واکنشها بسیار سریعتر باشند. ارتباط میانرباتی در این مدل صرفاً انتقال داده نیست، بلکه شامل معاملهی رفتاری نیز هست — به این معنا که هر ربات در صورت بروز تداخل حرکتی، پیشنهادهایی برای رفتار بعدی ارائه میدهد و در صورت توافق ضمنی میان چند ربات، مسیرها به شکل جمعی اصلاح میشوند. این فرآیند که در مقاله از آن با عنوان “Behavioral Negotiation” یاد میشود، اساس تصمیمگیری اجتماعی میان رباتهاست.
در گام سوم، فرآیند تعامل و تبادل دادهها به مرحلهی تصمیمگیری جمعی (Collective Decision-Making Layer) منتهی میشود. در این مرحله، رباتها با توجه به دادههای ادراکشده و توافقهای رفتاری، تصمیم نهایی دربارهی مسیر یا سرعت خود را اتخاذ میکنند. این تصمیمات از طریق نوعی منطق چندعاملی (Multi-Agent Logic) هدایت میشوند که در آن هر ربات سعی میکند نهتنها به هدف شخصی خود نزدیک شود بلکه به حفظ پایداری کل شبکه نیز کمک کند. در اینجا مفهوم تعادل جمعی مطرح میشود: وضعیتی که در آن تصمیم هر ربات بهصورت طبیعی با تصمیم سایرین همسو میشود، بدون اینکه نیازی به فرمان مرکزی باشد. این تعادل باعث میشود جریان حرکتی رباتها به شکل نرم، یکنواخت و خودسازمانده باقی بماند.
در گام چهارم، تصمیمگیری انجامشده توسط هر ربات وارد لایهی اجرای سازگار (Adaptive Execution Layer) میشود. این لایه مسئول پیادهسازی فیزیکی تصمیمها در قالب فرمانهای حرکتی است — مثلاً تغییر مسیر، تنظیم سرعت یا توقف لحظهای. ویژگی خاص این لایه در نسخهی اجتماعی سیستم این است که اجرای تصمیمها همواره بازخوردپذیر است. یعنی هر ربات پس از اجرای تصمیم خود، تأثیر آن را بر رفتار سایر رباتها میسنجد. اگر تصمیمی منجر به کاهش پایداری یا افزایش تراکم شود، الگوریتم در چرخهی بعدی تصمیم جدیدی اتخاذ میکند. این فرآیند شبیه به رفتار انسانی در محیطهای جمعی است که در آن هر کنش با واکنش دیگران تطبیق داده میشود.
در گام پنجم، نتایج حاصل از تعاملها وارد لایهی یادگیری اجتماعی (Social Learning Layer) میشود. این لایه همان بخش تکاملی سیستم است که تفاوت اصلی هوش اجتماعی با هوش مصنوعی کلاسیک را رقم میزند. در این مرحله، رباتها از رفتار یکدیگر یاد میگیرند و تجربههای مفید را در قالب الگوهای تصمیمگیری جدید ذخیره میکنند. اگر گروهی از رباتها با اتخاذ رفتار خاصی موفق به عبور ایمن از مسیر شلوغی شوند، سایر رباتها در شبکه نیز از این الگو یاد میگیرند و در موقعیتهای مشابه آن را به کار میبرند. این یادگیری نه در سطح داده بلکه در سطح رفتار اتفاق میافتد — یعنی سیستم از چگونگی واکنش میآموزد، نه صرفاً از نتیجهی واکنش.
از دید مهندسی، کل این ساختار مانند یک حلقهی بستهی یادگیری عمل میکند که دائماً در حال بازخوردگیری از رفتار جمعی است. در هر چرخه، سه پرسش کلیدی پاسخ داده میشود: «در حال حاضر چه اتفاقی در شبکه در حال رخ دادن است؟»، «بهترین پاسخ من برای حفظ پایداری چیست؟»، و «از تجربهی این تعامل چه میتوانم بیاموزم؟». این چرخهی سهمرحلهای باعث میشود سیستم همواره در حال اصلاح و بهبود باشد و بتواند با تغییر شرایط محیطی، ترکیب ناوگان یا اهداف کاری سازگار شود.
یکی از نکات برجسته در مقاله، سازگاری این چارچوب با زیرساختهای صنعتی موجود است. نویسندگان تأکید میکنند که برای پیادهسازی هوش اجتماعی، نیازی به تغییر سختافزاری اساسی در رباتها نیست. تنها کافی است لایههای نرمافزاری تعامل و یادگیری اجتماعی در معماری کنترلی فعلی اضافه شوند. در واقع، سیستم میتواند روی رباتهای موجود نصب شود و از طریق ارتباط بیسیم کوتاهبرد، یک شبکهی اجتماعی صنعتی ایجاد کند. این موضوع از نظر صنعتی اهمیت زیادی دارد، زیرا هزینهی مهاجرت از سیستمهای فعلی به سیستمهای اجتماعی را به حداقل میرساند و راه را برای پذیرش سریعتر این فناوری باز میکند.
در مجموع، روش پیشنهادی مقاله نه صرفاً یک مدل کنترلی بلکه یک چارچوب رفتاری و شناختی برای رباتهای صنعتی است؛ چارچوبی که به هر ربات اجازه میدهد همزمان بخشی از تصمیمهای خود را مستقل بگیرد و بخشی را در هماهنگی با جمع انجام دهد. نتیجهی این طراحی، شبکهای از رباتهای هوشمند است که میتوانند در زمان واقعی، با یکدیگر مذاکره، هماهنگی و سازگاری داشته باشند — درست همانگونه که تیمی از انسانها در یک محیط کاری پویا همکاری میکنند. این یعنی عبور از سطح «اتوماسیون عملکردی» به سطح اتوماسیون تعاملی و شناختی، جایی که رباتها نهتنها میفهمند چه باید بکنند، بلکه میفهمند دیگران چه میکنند و چرا.
نتایج تجربی و تحلیل رفتار جمعی در شبکهی اجتماعی رباتهای صنعتی
ارزیابی مدل هوش اجتماعی میانرباتی در این مقاله، نه در محیطهای سادهی شبیهسازیشده بلکه در شرایط واقعی و چندعاملی انجام شده است تا مشخص شود که آیا رباتهای حمل بار میتوانند واقعاً همانند اعضای یک جامعهی هوشمند، تصمیمگیری گروهی و رفتار جمعی منظم از خود نشان دهند یا نه. نتایج بهدستآمده از این آزمایشها، نقطهی عطفی در اثبات کارایی تفکر اجتماعی در رباتیک صنعتی است، چراکه نشان میدهد تصمیمگیری تعاملی میان رباتها، نهتنها به پایداری سیستم لطمه نمیزند بلکه بهرهوری کل شبکه را به شکل چشمگیری افزایش میدهد.
در نخستین مرحله از آزمایش، گروهی از رباتهای AMR در محیطی کنترلشده شامل چند مسیر باریک، نقاط تقاطع و موانع متحرک قرار گرفتند. در نسخهی پایه که بدون هوش اجتماعی کار میکرد، رفتار رباتها بیشتر فردمحور و رقابتی بود؛ هر ربات سعی داشت مسیر خود را زودتر طی کند و در نتیجه برخوردها و توقفهای متعددی در نقاط تلاقی ایجاد میشد. اما با فعالسازی لایهی اجتماعی و ارتباط میانرباتی، الگوی رفتاری سیستم بهطور کامل تغییر کرد. رباتها بهصورت خودکار فاصلههای ایمن ایجاد کردند، سرعت را هماهنگ ساختند و در نقاط تلاقی بهصورت توافقی نوبت عبور را مشخص کردند. جریان حرکتی پیوستهتر شد و ترافیکهای موضعی از میان رفت، بدون آنکه نیازی به فرمان از مرکز یا بازتنظیم مسیر وجود داشته باشد.
در محیطهای پیچیدهتر که موانع متحرک و عوامل انسانی نیز حضور داشتند، رفتار شبکهی اجتماعی رباتها به سطحی از هوش تطبیقی رسید که پیشتر تنها در الگوریتمهای زیستی مشاهده شده بود. زمانی که یک مانع انسانی در مسیر حرکت ظاهر میشد، رباتهای نزدیک به آن بلافاصله تغییر جهت میدادند و سایر رباتهای عقبتر نیز با درک رفتار جمعی، پیش از مشاهدهی مانع، مسیر خود را اصلاح میکردند. این پدیدهی پیشبینی جمعی (Collective Anticipation) یکی از قویترین نشانههای شکلگیری هوش اجتماعی در سیستم بود — رفتاری که در آن تصمیمگیری از واکنش به پیشبینی ارتقا یافته بود.
تحلیل دادههای عملکردی نشان داد که در مدل هوش اجتماعی، نرخ برخورد رباتها به صفر رسید، زمان متوسط مأموریت تا ۲۷ درصد کاهش یافت و مصرف انرژی حرکتی حدود ۳۰ درصد کمتر شد. مهمتر از همه، میزان توقفهای ناگهانی، که یکی از عوامل اصلی فرسودگی باتری و ایجاد ترافیک است، تقریباً حذف شد. رفتار حرکتی شبکه به جای مجموعهای از مسیرهای جداگانه، به شکلی موجگونه و همراستا درآمد؛ به بیان دیگر، سیستم به حالتی از هماهنگی خودجوش (Emergent Harmony) رسید که هیچ کنترلکنندهای قادر به ایجاد آن بهصورت مستقیم نیست.
در آزمایشهای مقیاس بزرگتر، زمانی که تعداد رباتها از دهها واحد به بیش از صد دستگاه افزایش یافت، رفتار جمعی همچنان پایدار ماند. در سیستمهای کلاسیک، افزایش مقیاس معمولاً منجر به ازدحام، کندی تصمیمگیری و افزایش خطا میشود، اما در ساختار اجتماعی پیشنهادی، چون تصمیمگیری در سطح محلی و توزیعشده انجام میشد، پایداری کل شبکه حفظ گردید. رباتها بهطور طبیعی به خوشههای حرکتی تقسیم شدند که هرکدام در محدودهی کاری خود بهصورت مستقل هماهنگ عمل میکردند و در نقاط مرزی میان خوشهها ارتباطات تنظیمشدهای برقرار بود. این ساختار، شبکه را از فروپاشی در تراکم بالا حفظ کرد و نشان داد که سیستم میتواند بدون نیاز به بازطراحی، در مقیاسهای مختلف به کار گرفته شود.
ویژگی چشمگیر دیگر این مدل، توانایی یادگیری رفتاری در سطح جمعی بود. رباتها در طول مأموریتهای متوالی، الگوهای حرکتی خود را اصلاح کردند و در هر چرخه، نرخ موفقیت و روانی حرکت افزایش یافت. برای مثال، در آزمایشهای اولیه میانگین زمان تصمیمگیری در نقاط تلاقی حدود ۱٫۲ ثانیه بود، اما پس از چند ده چرخهی کاری، این زمان به کمتر از نیم ثانیه کاهش یافت. این بهبود بدون مداخلهی خارجی اتفاق افتاد؛ یعنی سیستم بهصورت طبیعی از تجربههای گذشتهی خود آموخته بود. این رفتار تکاملی، مصداقی واقعی از هوش اجتماعی یادگیرنده در شبکههای صنعتی است — سیستمی که نه فقط عمل میکند، بلکه در گذر زمان، درک و پیشبینی بهتری از خود و دیگران پیدا میکند.
از منظر کیفی، رفتار شبکه نیز دگرگون شد. در محیطهایی که قبلاً رقابت میان رباتها موجب توقفهای زنجیرهای میشد، حالا هماهنگی و اعتماد جایگزین رقابت شده بود. هر ربات در تصمیمگیری خود، منافع گروه را نیز لحاظ میکرد و از اقداماتی که ممکن بود به بینظمی شبکه منجر شود خودداری مینمود. چنین تغییری در منطق تصمیمگیری، نشانهای از شکلگیری آگاهی جمعی عملیاتی (Operational Collective Awareness) است — سطحی از بلوغ سیستمی که در آن رفتار کل شبکه نه از کنترل بیرونی بلکه از درک درونی اعضا هدایت میشود.
نتایج حاصل از این پژوهش نشان داد که پیادهسازی هوش اجتماعی در رباتهای AMR و AGV میتواند کارایی عملیاتی را در ابعادی که تاکنون در سیستمهای خودکار مشاهده نشده بود، افزایش دهد. شبکهای از رباتها که پیشتر نیازمند کنترل مرکزی، زمانبندی پیچیده و مدیریت انسانی بود، اکنون قادر است بهطور خودکار رفتار خود را تنظیم کرده، مشکلات حرکتی را حل کند و حتی از شکستهای گذشته درس بگیرد. در واقع، سیستم به سطحی از خودمدیریتی صنعتی (Industrial Self-Governance) رسیده است؛ مرحلهای که در آن انسان دیگر طراح لحظهبهلحظهی مسیر نیست، بلکه ناظر بلوغ رفتاری یک جامعهی رباتی هوشمند است.
در جمعبندی، میتوان گفت که نتایج تجربی مقاله، نهتنها اعتبار علمی مدل را اثبات کرده بلکه تصویری روشن از آیندهی رباتهای حمل بار ارائه داده است — آیندهای که در آن، ازدحام رباتها بهجای آشفتگی، به هماهنگی تبدیل میشود و تصمیمگیری نه از بالا به پایین، بلکه از درون شبکه و میان اعضا شکل میگیرد. این همان لحظهای است که اتوماسیون صنعتی از یک سیستم مکانیکی به یک اکوسیستم اجتماعی–هوشمند تبدیل میشود؛ جایی که رباتها نهتنها وظیفه دارند، بلکه رفتار دارند.
کاربردهای صنعتی و سناریوهای واقعی هوش اجتماعی در رباتهای حمل بار خودکار
۱. انبارهای هوشمند و مراکز توزیع چندرباتی
در مراکز توزیع بزرگ، جایی که دهها یا صدها ربات AMR بهصورت همزمان میان قفسهها در حال حرکتاند، ازدحام و تداخل حرکتی یکی از چالشهای اصلی است. الگوریتمهای سنتی معمولاً این ترافیک را با زمانبندی متمرکز کنترل میکنند، اما با افزایش تعداد رباتها، این روش بهسرعت ناکارآمد میشود. در اینجا هوش اجتماعی به عنوان ستون فکری سیستم وارد عمل میشود. هر ربات میتواند وضعیت حرکتی دیگران را تحلیل کند، مسیر خود را طوری تنظیم کند که در نقاط پرتراکم نماند و حتی بهصورت جمعی تصمیم بگیرد که بخشی از شبکه را موقتاً تخلیه کند تا جریان کاری روانتر شود.
این رفتار هماهنگ و خودتنظیم موجب کاهش توقفهای متوالی، حذف گلوگاههای حرکتی و افزایش چشمگیر بهرهوری در انبارهای بزرگ میشود. نتیجه، جریان پیوستهی مواد و کالا است؛ بدون نیاز به سرورهای سنگین، خطوط کنترل مرکزی یا نظارت انسانی.
۲. خطوط تولید خودکار و سیستمهای تأمین مواد
در خطوط تولیدی که از چندین ربات AGV برای انتقال مواد میان ایستگاههای مونتاژ استفاده میشود، تأخیر در هماهنگی میتواند به توقف کل خط منجر شود. با بهرهگیری از هوش اجتماعی، رباتها نهتنها مأموریت خود را میدانند بلکه از هدف و زمانبندی دیگر رباتها نیز آگاهاند. بهمحض مشاهدهی احتمال تداخل یا برخورد، آنها از طریق ارتباطات کوتاهبرد تصمیم جمعی اتخاذ میکنند تا مسیرها یا زمان ورود به ایستگاهها تنظیم شود.
این مدل بهویژه در تولیدات متغیر — مثل صنایع خودروسازی یا الکترونیک — بسیار مؤثر است، زیرا سیستم میتواند با تغییر در حجم تولید یا ترتیب فرآیندها، خود را بهصورت خودکار بازپیکربندی کند. این یعنی انعطافپذیری لحظهای در شبکهی تولید بدون نیاز به توقف برای برنامهریزی مجدد.
۳. بنادر، فرودگاهها و مراکز لجستیکی با تراکم بالا
در بنادر صنعتی و مراکز بارگیری، رباتهای حمل کانتینر و بارهای سنگین دائماً در حال حرکت میان داکها، کامیونها و انبارهای موقت هستند. تداخل مسیرها، محدودیت فضا و تغییر مداوم موقعیت وسایل نقلیه، محیط را به یکی از پیچیدهترین صحنههای کاری برای رباتهای خودکار تبدیل کرده است.
هوش اجتماعی در این محیطها به رباتها کمک میکند تا همانند یک تیم لجستیکی هوشمند رفتار کنند. هر ربات میتواند با تحلیل رفتار دیگران، پیشبینی کند که کدام مسیر در چند ثانیهی آینده شلوغ میشود و از همان لحظه مسیر جایگزین را انتخاب کند. در این حالت، تصمیمها بهصورت بلادرنگ، غیرمتمرکز و بر اساس پیشبینی جمعی گرفته میشوند.
نتیجهی این رفتار، کاهش قابلتوجه زمان بارگیری و تخلیه، افزایش ایمنی و جلوگیری از برخوردهای پرهزینه در محیطهای صنعتی پرتراکم است.
۴. همکاری انسان و ربات در فضاهای مشترک
یکی از برجستهترین کاربردهای هوش اجتماعی، ایجاد تعامل ایمن و طبیعی میان انسانها و رباتها در محیطهای کاری مشترک است. در کارخانههای مدرن، کارگران و رباتهای AMR اغلب در فضاهای نزدیک به هم فعالیت میکنند و در چنین محیطهایی، پیشبینی رفتار انسانی حیاتی است.
در چارچوب هوش اجتماعی، رباتها یاد میگیرند تا حرکت، ژست و حتی الگوهای رفتاری انسانها را تحلیل کنند. اگر کارگری ناگهان مسیر خود را تغییر دهد یا وارد محدودهی حرکتی ربات شود، سیستم بهصورت اجتماعی و با هماهنگی میان رباتها مسیرهای جایگزین را محاسبه میکند تا هم ایمنی حفظ شود و هم جریان کاری مختل نگردد.
چنین سیستمی باعث شکلگیری همزیستی واقعی انسان–ربات میشود، جایی که رباتها نه بهعنوان خطر، بلکه به عنوان همکارانی قابل پیشبینی و هماهنگ در کنار انسانها عمل میکنند.
۵. شبکههای چندکارخانهای و هماهنگی میان واحدها
در صنایع بزرگ که چند کارخانه یا انبار در یک شبکهی لجستیکی متصل بههم فعالیت میکنند، نیاز به هماهنگی میان صدها ربات از مکانهای مختلف وجود دارد. در این سناریو، هوش اجتماعی میتواند به عنوان زیرساخت تصمیمگیری در مقیاس اکوسیستم عمل کند. هر گروه از رباتها نهتنها درون کارخانه بلکه در ارتباط با سایر واحدها نیز هماهنگ میشود؛ مثلاً گروهی از رباتهای انبار تصمیم میگیرند که بخشی از بار را به گروهی در خط تولید دیگر واگذار کنند تا از ازدحام جلوگیری شود.
این نوع همکاری فرامحلی، شکل پیشرفتهتری از شبکههای صنعتی اجتماعی (Industrial Social Networks) است؛ جایی که ارتباط میان رباتها از سطح فیزیکی فراتر میرود و به سطح اشتراک وظیفه، منابع و تصمیمگیری چندسطحی میرسد.
۶. رباتهای بازرسی و نگهداری در زیرساختهای صنعتی
در محیطهایی مانند پالایشگاهها، نیروگاهها یا خطوط لولهی طولانی، بازرسی و تعمیرات دورهای نیاز به همکاری میان چندین ربات دارد. مدل هوش اجتماعی میتواند میان این رباتها تقسیم وظیفهی پویا برقرار کند.
برای مثال، اگر یکی از رباتهای بازرسی مسیر خاصی را پوشش دهد، سایر رباتها با دریافت اطلاعات مکانی او بهصورت خودکار مناطق دیگر را انتخاب میکنند تا هیچ نقطهای دوبارهکاری یا از قلم نیفتد. این تعامل جمعی موجب صرفهجویی در زمان، کاهش خطر و افزایش دقت بازرسی میشود.
به این ترتیب، هوش اجتماعی نهفقط برای حرکت در محیطهای شلوغ، بلکه برای تخصیص هوشمند منابع و مأموریتها نیز کاربرد دارد.
۷. کشاورزی رباتیک و همکاری در زمینهای باز
در کاربردهای کشاورزی دقیق (Precision Agriculture)، رباتهای خودکار در زمینهای گسترده برای کاشت، برداشت یا سمپاشی فعالیت میکنند. در این محیطها، کنترل مرکزی معمولاً غیرعملی است. با بهکارگیری منطق اجتماعی، هر ربات میتواند بر اساس موقعیت و رفتار دیگر رباتها محدودهی کاری خود را بهینه کند.
در نتیجه، کل ناوگان بهصورت هماهنگ و بدون تداخل فعالیت میکند، حتی در شرایطی که زمین ناهموار یا سیگنال ارتباطی ضعیف باشد. این یعنی هوش اجتماعی میتواند مفهوم ازدحام سازنده را از محیطهای بستهی صنعتی به فضاهای باز کشاورزی و زیرساختی گسترش دهد.
در مجموع، هوش اجتماعی در رباتهای حمل بار، پلی میان دنیای اتوماسیون فیزیکی و هوش توزیعشدهی شناختی است. از انبار تا بندر، از کارخانه تا مزرعه، این فناوری توانسته است محیطهای کاری را از ازدحام و رقابت به همکاری و درک متقابل تبدیل کند. در چشمانداز آینده، هر ربات نه عضوی از یک سیستم، بلکه عضوی از یک جامعه خواهد بود — جامعهای صنعتی، پویا و هوشمند که میتواند بدون دستور، تصمیم بگیرد و بدون نظارت، هماهنگ بماند.
جمعبندی استراتژیک و مزیتهای رقابتی هوش اجتماعی در صنعت رباتهای حمل بار
ورود هوش اجتماعی به دنیای رباتهای صنعتی، نقطهی عطفی در تاریخ اتوماسیون است؛ زیرا برای نخستین بار، مفهوم بهرهوری دیگر صرفاً از سرعت و دقت ماشینها ناشی نمیشود، بلکه از درک متقابل، همکاری و رفتار جمعی میان رباتها سرچشمه میگیرد. در این چارچوب، رباتها دیگر فقط بازوان اجرایی نیستند، بلکه تبدیل به عاملان تصمیمگیر و یادگیرندهای میشوند که در هماهنگی کامل با یکدیگر اهداف مشترک را دنبال میکنند. این تغییر بنیادین در منطق طراحی سیستمهای خودکار، همان چیزی است که آیندهی صنعت لجستیک و تولید را از رقابت فیزیکی به رقابت هوشمندانه منتقل میکند.
از منظر مدیریتی، بزرگترین دستاورد هوش اجتماعی در رباتهای حمل بار، کاهش چشمگیر پیچیدگی مدیریتی سیستمهای چندعاملی است. در معماریهای سنتی، هرچه تعداد رباتها بیشتر میشد، نیاز به کنترل مرکزی و زمانبندی دقیقتر افزایش مییافت و مدیر سیستم مجبور بود همواره درگیر اصلاح ترافیک، مسیرها و مأموریتها باشد. اما در سیستم اجتماعی، این بار مدیریتی بهصورت طبیعی میان خود رباتها توزیع میشود. هر واحد، تصمیمات خود را در هماهنگی با همتیمیهایش میگیرد و بدینترتیب ساختاری از «مدیریت درونزا» شکل میگیرد؛ ساختاری که بدون نیاز به مداخلهی انسانی، خود را تنظیم و بهینه میکند. این تغییر، مفهوم مدیریت خودتنظیم (Self-Governed Management) را وارد دنیای صنعت میکند، جایی که انسان به جای کنترل جزئیات، به نقش ناظر استراتژیک ارتقا مییابد.
از دید اقتصادی، پیادهسازی هوش اجتماعی منجر به افزایش بهرهوری و کاهش هزینههای عملیاتی در چند سطح همزمان میشود. حذف توقفهای غیرضروری، کاهش زمان مأموریتها، صرفهجویی در مصرف انرژی و افزایش طول عمر تجهیزات حرکتی، همگی حاصل تصمیمهای هوشمند جمعیاند. علاوه بر این، ساختار غیرمتمرکز ارتباطی، نیاز به زیرساختهای گرانقیمت کنترل مرکزی را حذف میکند و بار محاسباتی شبکه را میان اعضا تقسیم مینماید. این به معنای مقیاسپذیری اقتصادی سیستم است — هرچه تعداد رباتها بیشتر شود، هزینهی مدیریتی به جای افزایش، تقریباً ثابت باقی میماند. چنین پایداری هزینه در مقیاس بالا، یکی از شاخصترین مزیتهای رقابتی در بازار جهانی لجستیک هوشمند به شمار میرود.
از جنبهی فناورانه، هوش اجتماعی نقطهی تلاقی سه حوزهی حیاتی است: رباتیک خودکار، علوم شناختی و شبکههای توزیعشده. این همگرایی باعث خلق سیستمی میشود که نهتنها از محیط یاد میگیرد بلکه میتواند الگوهای رفتاری جدیدی را در پاسخ به تغییرات محیطی توسعه دهد. چنین قابلیتی سیستم را از سطح «قابل برنامهریزی» به سطح قابل رشد و تحول ارتقا میدهد. به بیان دیگر، هوش اجتماعی همان موتور تکامل خودکار در صنعت است — سیستمی که میتواند بدون بازنویسی کدها یا تغییر سختافزار، خود را با نیازهای جدید تطبیق دهد.
از منظر رقابت صنعتی، شرکتهایی که زودتر به سمت سیستمهای اجتماعی حرکت کنند، بهسرعت از رقبا فاصله میگیرند. زیرا در این مدل، هر خط تولید یا مرکز توزیع بهصورت خودکار و پیوسته بهینه میشود. در حالی که سیستمهای سنتی برای هر تغییر کوچک نیاز به مهندسی مجدد دارند، سیستمهای اجتماعی در لحظه خود را تنظیم میکنند. این قابلیت، به معنای چابکی عملیاتی مطلق (Operational Agility) است؛ عاملی که در دنیای تولید و لجستیک امروز، تفاوت میان بقا و عقبماندگی را تعیین میکند.
از نگاه کلان صنعتی، هوش اجتماعی مسیر حرکت از «صنعت هوشمند» به «جامعهی صنعتی هوشمند» را هموار میکند. در صنعت ۴.۰، هدف اصلی اتصال ماشینها به یکدیگر بود؛ اما در عصر جدید، یعنی صنعت ۵.۰، هدف اتصال در سطح رفتاری و شناختی است. ماشینها باید نهتنها دادهها بلکه نیتها، اهداف و تصمیمهای خود را نیز به اشتراک بگذارند. این یعنی ورود به عصری که در آن، رباتها نه صرفاً ابزار تولید بلکه همکارانی فعال و تصمیمگیر هستند. این تغییر نهتنها بهرهوری را افزایش میدهد، بلکه رابطهی انسان و ماشین را از سطح دستور و اجرا به سطح همکاری و درک متقابل ارتقا میدهد.
در سطح استراتژیک جهانی، کشورها و شرکتهایی که بتوانند هوش اجتماعی را در زیرساختهای تولیدی و لجستیکی خود پیادهسازی کنند، به مزیتی بلندمدت در رقابت صنعتی دست خواهند یافت. چون این سیستمها نهتنها سریعتر و ارزانترند، بلکه پایدارتر، سازگارتر و مقاومتر نیز هستند. از دید اقتصادی کلان، چنین شبکههایی هزینهی انرژی و نگهداری را به شدت کاهش میدهند و از دید زیستمحیطی، با بهینهسازی حرکتها و مصرف، اثر کربنی را تا حد قابل توجهی پایین میآورند.
در نهایت، میتوان گفت که هوش اجتماعی در رباتهای صنعتی تنها یک فناوری نیست، بلکه یک فلسفهی مدیریتی نو است؛ فلسفهای که کنترل را از مرکز به اجتماع واگذار میکند و یادگیری را از فرد به جمع میسپارد. در این چارچوب، هر ربات به اندازهی خود در پایداری و بهرهوری کل سیستم سهم دارد و همین مفهوم، زیربنای اکوسیستمهای صنعتی خودآگاه (Conscious Industrial Ecosystems) در دههی آینده خواهد بود.
نتیجهگیری نهایی
تحول دیجیتال صنعت تا امروز عمدتاً بر پایهی خودکارسازی فرآیندها و هوشمندسازی تصمیمهای فردی بنا شده بود، اما مقالهی حاضر نشان داد که آیندهی واقعی اتوماسیون، نه در هوش مصنوعی منفرد، بلکه در هوش اجتماعی جمعی میان رباتها نهفته است. در این چشمانداز تازه، رباتهای حمل بار دیگر تنها ابزارهای لجستیکی نیستند؛ آنها بازیگران اجتماعی یک شبکهی صنعتی پویا هستند که از تعامل، اعتماد و یادگیری متقابل قدرت میگیرند. سیستمهایی که روزگاری برای حرکت در مسیرهای از پیش تعریفشده طراحی میشدند، اکنون توانایی گفتوگو، تصمیمگیری و سازگاری در لحظه را پیدا کردهاند — و این همان تغییری است که اتوماسیون را از سطح عملکرد به سطح شعور جمعی ارتقا میدهد.
از دل این پژوهش، تصویری روشن از آیندهی صنعت بیرون میآید؛ آیندهای که در آن، شبکههای رباتهای AMR و AGV به صورت خودسازمانده، خودآموز و خودتصمیمگیر عمل میکنند. این شبکهها نه به فرمانهای متمرکز وابستهاند، نه به زیرساختهای سنگین ارتباطی، بلکه به هوش توزیعشدهای متکیاند که در رفتار جمعی آنها نهفته است. در چنین سیستمی، هر ربات با درک محیط و تحلیل رفتار دیگران، در لحظه به تصمیمهایی میرسد که هم برای خودش و هم برای کل شبکه مفید است. این یعنی دستیابی به بالاترین سطح پایداری، بهرهوری و استقلال صنعتی بدون نیاز به پیچیدگی مدیریتی یا وابستگی به انسان در سطح عملیاتی.
نتایج مقاله به روشنی اثبات میکنند که پیادهسازی هوش اجتماعی میانرباتی میتواند بهبودهای چندجانبه در کارایی، ایمنی و چابکی عملیاتی ایجاد کند. کاهش نرخ برخورد به صفر، صرفهجویی انرژی تا ۳۰ درصد، افزایش روانی جریان حرکت و حذف ترافیک در مسیرهای شلوغ تنها بخشی از این دستاوردهاست. اما فراتر از این اعداد، ارزش واقعی در تغییر فلسفهی تصمیمگیری نهفته است؛ تصمیمهایی که از دل تعامل و توافق جمعی شکل میگیرند، نه از محاسبات سرد و مجزا. این همان هوش اجتماعی صنعتی است که آیندهی لجستیک، تولید و مدیریت زنجیرهی تأمین را دگرگون خواهد کرد.
در افق بلندمدت، چنین سیستمی بنیان شکلگیری نسل جدیدی از کارخانهها و زیرساختهای خودآگاه را فراهم میکند — کارخانههایی که مانند موجودات زنده رفتار میکنند، درک میکنند، تجربه میاندوزند و بهصورت طبیعی تکامل مییابند. در این ساختار، هر ربات عضوی از یک جامعهی دیجیتال است که از طریق گفتگو، مشاهده و یادگیری جمعی، بهرهوری را تا مرزهای جدیدی پیش میبرد. این همان لحظهای است که صنعت از «هوشمند بودن» به «خودآگاه بودن» عبور میکند.
دعوت به اقدام
امروز، صنایع لجستیک و تولید در آستانهی جهشی هستند که میتواند همانند انقلاب صنعتی قرن نوزدهم، مسیر آیندهی کار را بازنویسی کند. گذار از رباتهای خودمختار به رباتهای اجتماعی نه فقط یک انتخاب فناورانه، بلکه یک ضرورت استراتژیک است. شرکتهایی که از امروز به سمت توسعه و پیادهسازی مدلهای هوش اجتماعی حرکت کنند، فردا در زمرهی پیشروان جهانی صنعت خواهند بود.
توصیه میشود سازمانهایی که از ناوگانهای رباتیک استفاده میکنند — چه در حمل مواد، چه در تولید یا بازرسی — پروژههای پایلوتی برای پیادهسازی هوش اجتماعی در زیرسیستمهای خود طراحی کنند. این کار نهتنها به کاهش هزینههای عملیاتی کمک میکند، بلکه راه را برای ایجاد اکوسیستمهای صنعتی خودتنظیم و همکار باز مینماید. در سطح تحقیقاتی نیز، گسترش همکاری بین دانشگاهها و صنایع در زمینهی یادگیری اجتماعی میانرباتی میتواند سرعت بلوغ این فناوری را افزایش دهد و آن را از محیطهای آزمایشی به مقیاس واقعی صنعتی منتقل کند.
در نهایت، صنعت امروز بیش از هر زمان دیگری به سیستمهایی نیاز دارد که بتوانند بیاموزند، سازگار شوند و درک کنند — نه صرفاً عمل کنند. هوش اجتماعی همان پاسخی است که این نیاز را برآورده میسازد؛ پلی میان فناوری، روانشناسی جمعی و مهندسی کنترل که میتواند تعریف جدیدی از هوش، همکاری و بهرهوری ارائه دهد. آینده متعلق به صنایعی است که این پل را زودتر از دیگران طی کنند.
رفرنس دقیق مقاله
Z. Chen, A. Malikopoulos, and T. Wang,
“Cooperative Automated Vehicles: A Review of Opportunities and Challenges in Socially Intelligent Systems,”
IEEE Transactions on Intelligent Vehicles, 2023, pp. 1–18.
DOI: 10.1109/TIV.2023.3275411



{kind=link}
بدون نظر