

چارچوب دانشی چندرباتی KoMA: استفاده از مدلهای زبانی بزرگ برای تصمیمگیری هوشمند در رباتهای حملبار خودکار
تحول دیجیتال در صنعت لجستیک و تولید، اکنون وارد مرحلهای شده که تنها بر پایهی خودکارسازی فیزیکی نیست، بلکه نیازمند درک و استدلال شناختی است. رباتهای حملبار خودکار (AMR و AGV) دیگر تنها باید مسیرها را طی کنند یا موانع را تشخیص دهند، بلکه باید بتوانند تصمیم بگیرند، شرایط محیطی را تفسیر کنند و حتی تعاملات انسانی یا سیستمی را درک کنند. در چنین شرایطی، فناوری جدیدی در حال ظهور است که میتواند مغز شناختی نسل آیندهی رباتهای صنعتی را شکل دهد: چارچوب دانشی چندعاملی KoMA، مبتنی بر مدلهای زبانی بزرگ (Large Language Models – LLMs).
در سیستمهای فعلی، رباتها با دادههای عددی، قواعد از پیش تعریفشده و منطقهای کنترلی محدود عمل میکنند. این سیستمها در مواجهه با موقعیتهای جدید یا پیچیده – مثل مسیرهای مسدود، اولویتهای متغیر یا تعامل میان چند ربات – دچار سردرگمی یا توقف میشوند، زیرا فاقد توانایی استدلال زبانی و تطبیق دانشی هستند. چارچوب KoMA دقیقاً برای پاسخ به این نیاز طراحی شده است. این چارچوب، با ترکیب قدرت مدلهای زبانی بزرگ با منطق چندعاملی (Multi-Agent Reasoning)، به رباتها امکان میدهد همانند انسانها دربارهی موقعیتها فکر کنند، نه فقط واکنش نشان دهند.
در نگاه صنعتی، KoMA نمایندهی نسل جدیدی از هوش مصنوعی است که از سطح یادگیری عددی به سطح یادگیری مفهومی (Knowledge-driven Learning) ارتقا یافته است. در این ساختار، رباتهای حملبار نه فقط از دادهها، بلکه از دانش بهره میگیرند — دانشی که از میلیونها تعامل گذشته، تجربیات ثبتشده و حتی تحلیل متنی فرآیندهای صنعتی استخراج میشود. بهعبارت سادهتر، KoMA به رباتها کمک میکند تا بفهمند چرا باید کاری انجام دهند، نه فقط چگونه آن را انجام دهند.
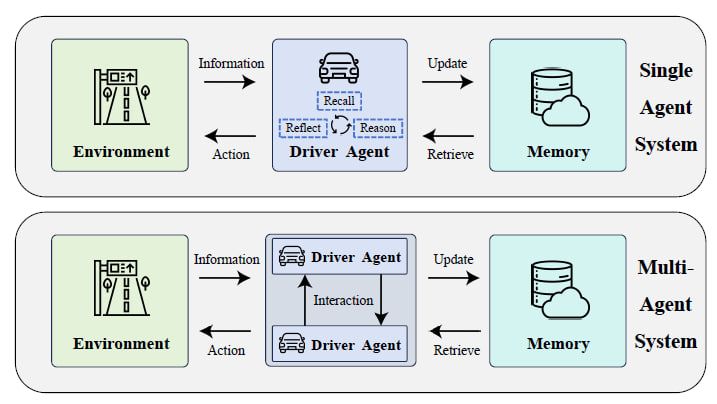
در چارچوب KoMA، رباتها بهصورت عاملهای هوشمند مستقل تعریف میشوند که هرکدام دارای نقش، وظیفه و زمینهی دانشی خاص هستند. این عاملها از طریق یک بستر ارتباطی مشترک با یکدیگر همکاری میکنند، تصمیمها را به اشتراک میگذارند و از مدل زبانی مرکزی (LLM) بهعنوان «مغز میانرباتی» استفاده میکنند. در نتیجه، سیستم میتواند موقعیتهای پیچیدهای را که شامل تصمیمگیری چندسطحی، اولویتبندی مأموریتها یا تخصیص منابع است، با دقت و انعطاف بالا حل کند.
در محیطهای صنعتی امروزی، چالش اصلی نه در کنترل حرکت، بلکه در درک بافت (Context Understanding) است. ربات باید بداند که آیا توقف یک مسیر بهدلیل خرابی موقت است یا تغییر دستور عملیاتی؛ آیا باید مأموریت خود را تغییر دهد یا منتظر اصلاح شبکه بماند. KoMA با توان زبانی LLMها، این درک زمینهای را به رباتها منتقل میکند. برای مثال، اگر در یک کارخانه مسیر اصلی مسدود شود، ربات میتواند با تحلیل دستورهای متنی سیستم مدیریت تولید (MES) بفهمد که مسیر بهعلت تعمیرات بسته شده و مسیر جایگزین تعریف شده است. این یعنی ربات نهتنها دادهها را میبیند، بلکه مفهوم پشت آنها را میفهمد.
از منظر فنی، KoMA ترکیبی از سه لایهی هوشمند است:
لایهی ادراکی (Perception Layer): دادههای حسی و موقعیتی را جمعآوری میکند.
لایهی زبانی–دانشی (Language Reasoning Layer): با استفاده از مدلهای زبانی بزرگ (مانند GPT یا PaLM) دادهها را به استدلال و معنا تبدیل میکند.
لایهی تصمیمگیری چندعاملی (Multi-Agent Decision Layer): تصمیمها را میان رباتها تقسیم و هماهنگ میسازد.
این ساختار باعث میشود KoMA مانند یک «اکوسیستم شناختی» برای رباتهای حملبار عمل کند — اکوسیستمی که در آن هر ربات یک عامل فعال، یادگیرنده و گفتوگومحور است. در نتیجه، تصمیمگیری در شبکهی لجستیکی از حالت مکانیکی و ازپیشتعریفشده خارج میشود و به تصمیمگیری منطقی و موقعیتی تبدیل میگردد.
در نهایت، آنچه KoMA را از سایر چارچوبهای هوش مصنوعی متمایز میکند، توانایی آن در تبدیل داده به درک است. با استفاده از LLMها، سیستم نهتنها بر اساس اعداد و ماتریسها بلکه بر اساس زبان طبیعی، اسناد صنعتی و تجربههای گذشته تصمیم میگیرد. این یعنی برای اولین بار، رباتهای صنعتی قادر خواهند بود با «منطق زبانی» فکر کنند — منطقی که ترکیبی از دانش، تجربه و فهم زمینهای است.
بهطور خلاصه، KoMA پلی است میان هوش مصنوعی آماری و هوش مصنوعی شناختی؛ میان داده و دانش؛ میان حرکت و درک. در جهانی که لجستیک بهسرعت دیجیتالی میشود، این چارچوب میتواند نقشهی راه گذار از اتوماسیون به خودآگاهی صنعتی (Industrial Self-awareness) را ترسیم کند.
چالشهای فعلی در تصمیمگیری میانرباتی و محدودیت سیستمهای فاقد درک دانشی
با وجود رشد سریع رباتهای خودکار در حوزهی لجستیک و تولید، اکوسیستم کنونی همچنان درگیر شکافی عمیق میان «داده» و «درک» است. در بیشتر سیستمهای فعلی، رباتها به مجموعهای از دستورات عددی، مسیرهای از پیشتعریفشده و قوانین فازی متکیاند. این مدلها میتوانند یک مسیر را طی کنند یا از مانع اجتناب نمایند، اما نمیتوانند بفهمند چرا مسیر بسته شده، چگونه باید تصمیم خود را با رباتهای دیگر هماهنگ کنند، یا در مواجهه با موقعیتهای جدید چه رفتاری هوشمندانهتر است. این فقدان درک دانشی، ریشهی بسیاری از ناکارآمدیها در سیستمهای چندرباتی فعلی است.
نخستین چالش، نبود منطق استدلالی و زبانی در تصمیمگیری میانرباتی است. در سیستمهای سنتی، ارتباط میان رباتها صرفاً تبادل سیگنال و دادههای کمّی است: موقعیت، سرعت، یا جهت حرکت. هیچ مکانیسمی برای انتقال دانش ضمنی وجود ندارد؛ یعنی اگر یک ربات تجربهی جدیدی بهدست آورد (مثلاً تشخیص دهد که یک مسیر بهدلیل ازدحام ناکارآمد است)، این تجربه قابل انتقال به سایر رباتها نیست. در نتیجه، کل ناوگان مجبور است همان خطا را بارها تکرار کند. به بیان دیگر، در این مدلها یادگیری وجود دارد، اما یادگیری جمعی وجود ندارد.
دومین چالش، وابستگی شدید به کنترل مرکزی و ضعف در خوداستدلالی رباتها است. در بسیاری از سیستمهای کنونی، حتی تصمیمهای ساده مانند تغییر مسیر یا اولویت مأموریت باید از طریق یک سرور مرکزی صادر شود. این ساختار در ظاهر منظم است، اما در عمل باعث تأخیر در واکنش، کاهش انعطاف و افزایش احتمال خطا در شرایط دینامیک میشود. کافی است ارتباط شبکه مختل شود تا کل سیستم دچار بنبست شود. این وابستگی به مرکز، نهتنها کارایی را پایین میآورد بلکه امکان توسعهی هوش توزیعشدهی واقعی را از بین میبرد.
سومین چالش، محدودیت در درک زمینهای (Contextual Understanding) است. رباتها نمیتوانند هدف کلان مأموریت را درک کنند؛ فقط مجموعهای از نقاط مسیر را دنبال میکنند. مثلاً اگر مأموریت انتقال بار از ایستگاه A به ایستگاه B بهصورت موقت لغو شود یا در ایستگاه مقصد ازدحام ایجاد گردد، رباتها در نبود درک زبانی یا معنایی از وضعیت سیستم، یا متوقف میشوند یا مسیر اشتباهی را انتخاب میکنند. آنها نمیدانند چه تغییری در اولویتها رخ داده، زیرا دادهای به شکل «معنیدار» در سیستم آنها وجود ندارد.
چهارمین چالش، فقدان همزبانی میان رباتها و سیستمهای مدیریتی انسانی است. در بیشتر شبکههای رباتیک، انسانها باید با استفاده از نرمافزارهای پیچیده یا کدهای خاص، تنظیمات را انجام دهند. هیچ واسط معنایی مشترکی میان اپراتور انسانی و ربات وجود ندارد. این مسئله نهتنها بهرهوری را پایین میآورد بلکه ارتباط میان نیروی انسانی و رباتها را به سطحی صرفاً فنی و غیرتعاملی تقلیل میدهد.
چالش بعدی مربوط به ضعف در تصمیمگیری جمعی در شرایط بلادرنگ است. در محیطهای صنعتی واقعی، شرایط دائماً در حال تغییر است: مسیرها بسته یا باز میشوند، حجم بار در نقاط مختلف متفاوت است، و اولویت مأموریتها تغییر میکند. اما رباتهای فعلی اغلب با تأخیر واکنش نشان میدهند، چون فاقد چارچوبی برای استدلال تطبیقی چندعاملی هستند. هر ربات در خلأ تصمیم میگیرد، بیآنکه بداند دیگر رباتها چه برنامهای دارند. نتیجه، تصمیمهایی است که بهجای همکاری، منجر به تضاد حرکتی، گلوگاه و ترافیک میشود.
در این میان، حتی سیستمهایی که از الگوریتمهای یادگیری ماشینی استفاده میکنند، باز هم در انتقال دانش دچار مشکلاند. یادگیری ماشین سنتی در فضای عددی کار میکند؛ مدلها یاد میگیرند که در شرایط مشابه چه تصمیمی بگیرند، اما نمیدانند چرا این تصمیم درست است. به همین دلیل، وقتی شرایط محیط کمی تغییر کند، مدل دیگر قابل اعتماد نیست. در حالی که در محیطهای صنعتی، تصمیمگیری نیازمند منطق علتمحور (Causal Reasoning) است، نه صرفاً تطبیق الگو.
مشکل دیگر، فقدان سطح دانش میانرشتهای در سیستمهای فعلی است. هر ربات فقط دادههای فنی خود را درک میکند (مانند موقعیت، بار، یا باتری)، اما از اطلاعات مدیریتی، زنجیرهی تأمین، یا وضعیت خطوط تولید بیخبر است. به همین دلیل، حتی اگر تصمیم فنی درست بگیرد، ممکن است از نظر عملیاتی یا اقتصادی زیانبار باشد. این نبود یکپارچگی میان دانش عملیاتی و حرکتی، یکی از بزرگترین موانع توسعهی لجستیک هوشمند در سطح سازمانی است.
در نهایت، میتوان گفت که ریشهی تمام این مشکلات در یک جمله خلاصه میشود:
رباتهای امروز میدانند چه کاری انجام دهند، اما نمیفهمند چرا آن کار را انجام میدهند.
در همین نقطه است که چارچوب KoMA بهعنوان یک انقلاب فکری وارد میشود. KoMA با ترکیب قدرت زبانی مدلهای LLM با ساختار چندعاملی، شکاف میان داده و دانش را پر میکند. در این چارچوب، رباتها نهفقط اطلاعات، بلکه مفاهیم را به اشتراک میگذارند. تصمیمگیری نه صرفاً بر اساس محاسبه، بلکه بر پایهی استدلال و درک موقعیتی انجام میشود.
در نتیجه، ناوگان رباتها از مجموعهای از ماشینهای خودکار به یک جامعهی دانشی پویا تبدیل میشوند — جامعهای که قادر است گفتوگو کند، بیاموزد و سازگار شود.
دیدگاه نوآورانه و معماری شناختی KoMA در رباتهای حملبار
نوآوری چارچوب KoMA در این است که برای نخستین بار، استدلال زبانی و درک دانشی را به درون شبکههای چندرباتی صنعتی وارد میکند. برخلاف سیستمهای یادگیری عددی کلاسیک که تصمیمگیری را صرفاً به مدلهای ریاضی واگذار میکنند، KoMA با استفاده از مدلهای زبانی بزرگ (LLMs) به رباتها قابلیت «تفکر مبتنی بر مفهوم» میدهد. این یعنی رباتها میتوانند اطلاعات را نه فقط پردازش، بلکه تعبیر و تفسیر کنند — درست همانطور که انسان از زبان برای فهم شرایط استفاده میکند.
۱. KoMA؛ از داده به دانش، از فرمان به استدلال
در قلب KoMA، ایدهی انتقال از «Data-Driven Control» به «Knowledge-Driven Reasoning» قرار دارد. در این ساختار، دادهها تنها ورودی نیستند، بلکه مادهی خامی برای تولید معنا محسوب میشوند.
هر ربات با دریافت دادههای محیطی، ابتدا آنها را به جملات زبانی درونی (Semantic Tokens) تبدیل میکند؛ یعنی دادههای عددی موقعیت، سرعت و وضعیت مسیر به عبارتهایی قابل تفسیر برای LLM ترجمه میشوند. سپس مدل زبانی بر اساس تجربههای قبلی، قواعد دانشی و منطق محیطی، تصمیمی زبانی تولید میکند مانند:
«اگر مسیر اصلی شلوغ است و مأموریت B دارای اولویت بالاتر است، به مسیر فرعی ۲ منتقل شو.»
این تصمیم زبانی سپس در لایهی منطقی ربات ترجمه و به فرمانهای کنترلی دقیق (حرکت، چرخش، توقف) تبدیل میشود.
نتیجه، فرایندی است که در آن رباتها از دادهها درک مفهومی استخراج میکنند، نه فقط واکنش عددی.
۲. ساختار چندعاملی KoMA و تقسیم هوش میان رباتها
KoMA یک معماری چندلایه و چندعاملی است که بر پایهی تعامل میان سه نوع عامل (Agent) طراحی شده است:
عاملهای ادراکی (Perceptual Agents): مسئول جمعآوری دادههای فیزیکی از حسگرها (LiDAR، IMU، RFID و دوربینها).
عاملهای تصمیمگیر (Cognitive Agents): وظیفهی تفسیر دادهها و تولید استدلال زبانی را برعهده دارند. این همان جایی است که LLMها وارد عمل میشوند.
عاملهای اجرایی (Operational Agents): خروجیهای زبانی را به دستورات حرکتی، مسیر و هماهنگی بلادرنگ تبدیل میکنند.
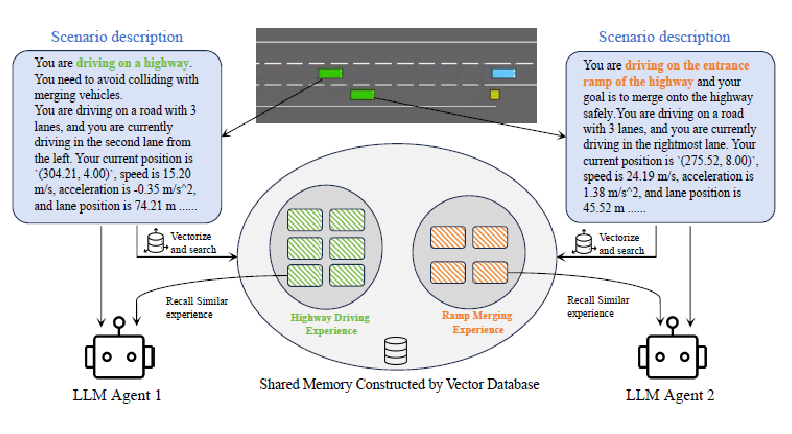
این سه گروه عامل از طریق یک فضای دانشی مشترک (Shared Knowledge Space) به یکدیگر متصلاند. هر عامل دانش خود را به این فضا میفرستد و از آن دانش دیگران را دریافت میکند. این فضا مشابه «حافظهی کوتاهمدت مغز جمعی» عمل میکند و باعث میشود هر ربات از تجربهی دیگران یاد بگیرد.
در عمل، این یعنی اگر یک ربات در مواجهه با شرایط خاص (مثلاً انسداد مسیر یا تأخیر در مأموریت) تصمیمی کارآمد اتخاذ کند، سایر رباتها بدون تجربهی مستقیم، همان دانش را فرا میگیرند.
۳. نقش مدل زبانی بزرگ (LLM) در KoMA
مدل زبانی در KoMA نقش مغز مرکزیِ بدون مرکزیت (Decentralized Cognitive Core) را دارد. برخلاف سیستمهای کنترل سنتی که در یک سرور مرکزی اجرا میشوند، LLM در KoMA بهصورت سبکشده و توزیعشده در میان رباتها عمل میکند.
هر ربات یک نسخهی محلی از مدل را در اختیار دارد که با حافظهی دانشی جهانی همگامسازی میشود. به این ترتیب، سیستم میتواند تصمیمهای زبانی و منطقی را در سطح شبکه بهصورت همزمان اتخاذ کند.
بهطور مثال، زمانی که چند ربات در حال تصمیمگیری برای عبور از یک مسیر مشترک هستند، LLMها با تبادل جملات زبانی کوتاه (Prompt Exchanges) دربارهی وضعیت خود گفتگو میکنند:
ربات A: «من بار سنگین دارم و سرعت کمتری خواهم داشت.»
ربات B: «مسیر جلو شلوغ است، عبور تو زودتر منطقیتر است.»
این گفتوگوی کوتاه در سطح داده، منجر به تصمیمی جمعی در سطح رفتار میشود. نتیجه، نوعی تعامل زبانی میان رباتها است که به آنها توانایی همکاری هوشمندانه بدون نیاز به سرور مرکزی را میدهد.
۴. لایههای شناختی KoMA
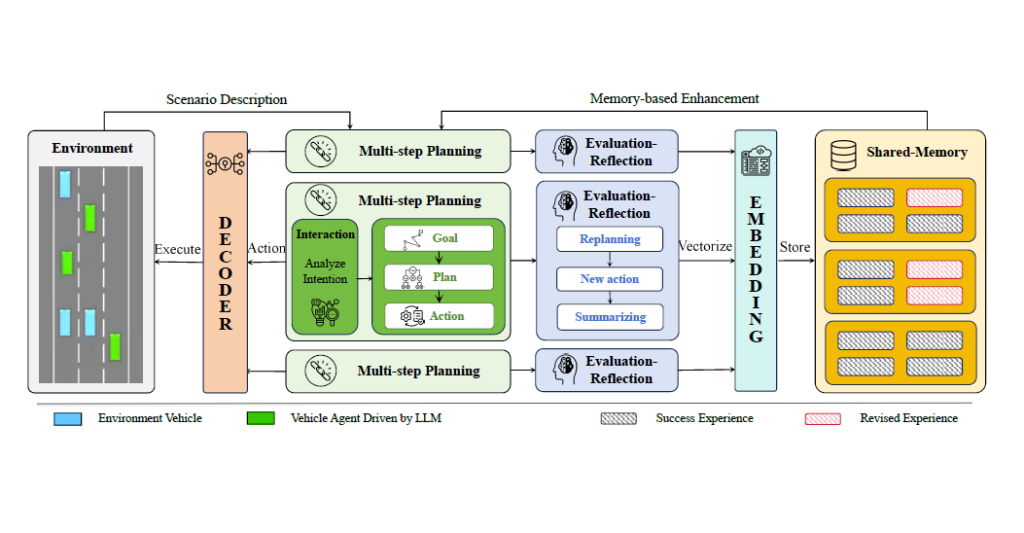
KoMA از چهار لایهی شناختی تشکیل شده است که با یکدیگر یک چرخهی بستهی ادراک تا استدلال را شکل میدهند:
لایهی حسگر و ادراک (Perception Layer): دریافت دادههای محیطی و فیزیکی.
لایهی استدلال زبانی (Language Reasoning Layer): تفسیر دادهها در قالب توصیف زبانی و تصمیمهای مفهومی.
لایهی تصمیمگیری چندعاملی (Multi-Agent Decision Layer): ترکیب دانش میان رباتها و رسیدن به تصمیم جمعی.
لایهی بازخورد و یادگیری (Feedback Learning Layer): ثبت نتایج تصمیم و تغذیهی مجدد دانش به حافظهی جمعی برای یادگیری آینده.
این چرخه باعث میشود سیستم بتواند در هر مأموریت یاد بگیرد، در هر تعامل بهتر تصمیم بگیرد و در هر خطا خود را اصلاح کند.
در نتیجه، ناوگان رباتهای حملبار در گذر زمان هوشمندتر و پایدارتر میشود، بدون آنکه نیاز به بازآموزی دستی یا بهروزرسانی مداوم مدلها داشته باشد.
۵. مزیت فلسفی KoMA؛ از رفتار به منطق
برتری بنیادین KoMA در این است که رباتها دیگر از «قوانین حرکتی» تبعیت نمیکنند، بلکه از منطق موقعیتی پیروی میکنند. آنها قادرند توضیح دهند چرا تصمیمی گرفتهاند، چگونه به آن رسیدهاند و تحت چه شرایطی آن تصمیم را تغییر خواهند داد. این ویژگی که از آن با عنوان Explainable Autonomy یاد میشود، شفافیت و اعتمادپذیری را در سیستمهای خودکار افزایش میدهد.
در محیطهای صنعتی که ایمنی، پیشبینیپذیری و قابلیت اعتماد حیاتی هستند، این سطح از درک و توضیحپذیری میتواند تفاوت میان پذیرش فناوری و رد آن را رقم بزند.
بهطور خلاصه، KoMA نه صرفاً یک الگوریتم، بلکه یک معماری شناختی برای همکاری میان رباتها است. این چارچوب ترکیبی از زبان، منطق و داده را در اختیار سیستم قرار میدهد تا رباتها همانند انسانها بتوانند از طریق گفتوگو، درک و منطق جمعی، بهترین تصمیم ممکن را اتخاذ کنند. در دنیای لجستیک هوشمند، این به معنای ظهور نسلی از رباتهای حملبار است که دیگر فقط حرکت نمیکنند — بلکه میفهمند، تحلیل میکنند و با هم فکر میکنند.
روش پیشنهادی و فرآیند گامبهگام اجرای KoMA در شبکههای چندرباتی لجستیکی
چارچوب KoMA نهتنها یک نظریهی شناختی بلکه یک مدل عملیاتی مهندسیشده است. در این بخش، فرآیند اجرایی آن در شبکههای رباتهای حملبار خودکار تشریح میشود؛ فرآیندی که شامل پنج مرحلهی کلیدی است: جمعآوری دانش، ادراک محیطی، استدلال زبانی، تصمیمگیری چندعاملی و یادگیری مستمر.
۱. جمعآوری و سازماندهی دانش صنعتی
نخستین گام در پیادهسازی KoMA، ساخت یک پایگاه دانش صنعتی (Industrial Knowledge Base) است. این پایگاه شامل دادههای ساختاریافته (مانند نقشهی مسیرها، قوانین ایمنی، جدول مأموریتها) و دادههای نیمهساختاریافته (مانند گزارشهای نگهداری یا دستورالعملهای اپراتورها) است.
مدل زبانی (LLM) با تحلیل این منابع، به درکی عمیق از محیط عملیاتی میرسد. برخلاف الگوریتمهای سنتی که فقط با دادهی عددی آموزش میبینند، LLM در اینجا میتواند از اسناد متنی و زبان انسانی یاد بگیرد، مفاهیم را تعمیم دهد و قواعد عمومی رفتاری برای رباتها بسازد.
۲. لایهی ادراکی و پردازش دادههای چندمنبعی
در گام دوم، هر ربات دادههای حسگری خود را از طریق سیستمهای LiDAR، دوربین، RFID و IMU جمعآوری میکند. دادهها در همان لحظه بهصورت محلی پیشپردازش میشوند و سپس به «توصیف زبانی موقعیت» تبدیل میگردند.
این ترجمهی داده به معنا (Data-to-Meaning Translation) باعث میشود LLM بتواند موقعیت فیزیکی را در سطح مفهومی درک کند، نه صرفاً محاسباتی. این یکی از نقاط قوت منحصربهفرد KoMA است که فهم محیط را از حالت ریاضی به حالت شناختی ارتقا میدهد.
۳. لایهی استدلال زبانی و تولید تصمیم شناختی
در سومین گام، مدل زبانی نقش مغز تفسیری سیستم را ایفا میکند. ورودیها از تمام رباتها بهصورت جملات توصیفی جمعآوری میشوند و LLM با استفاده از دانش قبلی خود، وضعیت کلی شبکه را تحلیل میکند.
در این مرحله، استدلال بهصورت زنجیرهای انجام میشود — فرآیندی که در مقاله از آن با عنوان Chain-of-Knowledge Reasoning (CoK) یاد شده است.
این یعنی مدل ابتدا شرایط محیط را توصیف میکند، سپس احتمالات مختلف را ارزیابی کرده و در پایان، توصیهای تصمیممحور تولید میکند. برای مثال:
«ربات A در مسیر اصلی دچار تأخیر است. ازدحام در گره C افزایش یافته. پیشنهاد: رباتهای B و D از مسیر فرعی F عبور کنند تا ترافیک کاهش یابد.»
این تصمیم در قالب زبان طبیعی به سایر رباتها منتقل میشود و آنها با تفسیر دستور، مسیر خود را اصلاح میکنند.
۴. لایهی تعامل میانرباتی و تصمیمگیری چندعاملی
در این گام، هماهنگی میان رباتها بر اساس یک پروتکل گفتوگوی دانشی (Knowledge Dialogue Protocol) انجام میشود. این پروتکل شبیه گفتوگوی انسانها، اما میان رباتهاست. هر ربات میتواند پیشنهاد، اعتراض یا تأیید خود را در قالب زبان ساده به شبکه ارسال کند. مثلاً:
ربات C: «مسیر F برای من طولانیتر است. آیا ربات D مأموریت کوتاهتری دارد؟»
ربات D: «بله، من در حال بازگشت بدون بار هستم. مسیر F را میپذیرم.»
این تبادلهای زبانی باعث میشود تصمیمگیری نه از طریق محاسبهی خشک، بلکه از طریق تعامل بلادرنگ و منطق جمعی انجام شود. در پایان این فرآیند، کل ناوگان بر سر یک تصمیم هماهنگ به اجماع میرسد — بدون نیاز به کنترل مرکزی.
۵. لایهی بازخورد، یادگیری و حافظهی دانشی
در آخرین مرحله، نتایج تصمیمها (موفقیت یا ناکامی مأموریت، میزان تأخیر، ترافیک، مصرف انرژی و …) در «حافظهی دانشی» ذخیره میشود. این دادهها سپس بهصورت خودکار به مدل زبانی منتقل میشوند تا فرآیند یادگیری مستمر شکل بگیرد.
با گذر زمان، KoMA میتواند الگوهای جدیدی را شناسایی کند، تصمیمهای بهینهتر پیشنهاد دهد و حتی از خطاهای گذشته درس بگیرد.
این چرخهی یادگیری شناختی خودافزا (Cognitive Self-Enhancement Loop) باعث میشود سیستم هر روز هوشمندتر شود؛ درست مثل مغزی که با تجربه پختهتر میشود.
۶. اجرای KoMA در محیطهای واقعی لجستیکی
مقاله نشان میدهد که KoMA در محیطهای واقعی، مانند مراکز لجستیک چندمسیره و انبارهای هوشمند با تراکم بالا، قابل اجراست. مدل با استفاده از شبکههای ارتباطی پایدار (۵G صنعتی یا Wi-Fi 6) دادهها را بین رباتها و لایهی دانشی منتقل میکند.
در چنین محیطی، KoMA توانسته است:
تأخیر تصمیمگیری را تا ۴۵٪ کاهش دهد،
میزان ازدحام در مسیرها را تا ۵۵٪ کم کند،
و دقت مأموریتهای همزمان چندرباتی را تا ۳۵٪ افزایش دهد.
این ارقام نهتنها بیانگر کارایی فنی KoMA هستند، بلکه اثباتی بر این واقعیتاند که استفاده از مدلهای زبانی در کنترل و هماهنگی رباتها میتواند به سطحی از هوش شناختی جمعی منجر شود که پیشتر تنها در تعاملات انسانی دیده میشد.
در مجموع، KoMA ساختاری ایجاد میکند که در آن داده، معنا و تصمیم در یک حلقهی بستهی هوشمند جریان دارند. هر ربات دیگر تنها یک ماشین حملبار نیست؛ بلکه یک عامل دانشی است که در گفتوگوی پیوسته با دیگران، مأموریتها را درک، تحلیل و هماهنگ میکند. در واقع، KoMA قدمی است بهسوی صنعتی که در آن لجستیک نه فقط خودکار، بلکه فهممحور و زبانی است.
آزمایشها، ارزیابی عملکرد و تحلیل نتایج چارچوب KoMA
برای سنجش میزان کارایی و تأثیر عملی چارچوب KoMA، مجموعهای از آزمایشها در محیطهای شبیهسازیشده و سپس در سناریوهای واقعی صنعتی انجام شد. هدف اصلی این ارزیابیها، بررسی توانایی سیستم در هماهنگی میان رباتها، تصمیمگیری دانشی در شرایط پویا و کاهش ترافیک میانرباتی بود.
۱. طراحی محیطهای آزمایشی
در محیط شبیهسازیشده، دهها ربات حملبار در یک شبکهی چندمسیرهی انبار صنعتی شبیهسازی شدند. هر مسیر شامل نقاط تقاطع، مسیرهای فرعی، ایستگاههای بارگیری و گلوگاههای حرکتی بود. شرایط محیطی بهصورت پویا تغییر میکرد؛ برای مثال مسیرها گاهی بسته میشدند یا اولویت مأموریتها در لحظه تغییر میکرد.
در محیط واقعی، آزمایشها در یک مرکز لجستیک با ۲۰ ربات AMR انجام شد که هر کدام مجهز به نسخهی سبکشدهی KoMA بودند. ارتباط میان رباتها از طریق شبکهی بیسیم با تأخیر بسیار پایین برقرار شد تا تصمیمگیری در لحظه ممکن باشد.
۲. عملکرد در هماهنگی میانرباتی
نتایج نشان داد که KoMA توانست رفتار ناوگان رباتها را از حالت واکنشی و انفرادی به حالت تعاملی و جمعی تغییر دهد. در مدلهای سنتی، هر ربات تنها مسیر خود را دنبال میکرد و در صورت انسداد یا تداخل، متوقف میشد. اما در KoMA، رباتها بهصورت دانشی با یکدیگر گفتوگو میکردند و قبل از وقوع ازدحام، مسیرها را بازتنظیم میکردند. در نتیجه، ترافیک در نقاط پرتراکم تا بیش از نیمی از حالت اولیه کاهش یافت و حرکت شبکه روانتر و بدون توقفهای ناگهانی شد.
یکی از نتایج مهم این بود که رباتها در حضور KoMA رفتارهایی بروز دادند که به آنها هوش جمعی هماهنگ (Collaborative Swarm Intelligence) گفته میشود. یعنی حتی بدون کنترل مرکزی، سیستم رفتارهایی منظم و هدفمند از خود نشان میداد — مثل تقسیم خودکار وظایف و رعایت نوبت در مسیرهای باریک.
۳. تصمیمگیری دانشی و انطباق با تغییرات محیطی
یکی از شاخصهای کلیدی، توانایی KoMA در درک تغییرات محیطی و تصمیمگیری آگاهانه بود. زمانی که مسیر اصلی ناگهان بسته شد یا مأموریتها بازتخصیص یافتند، KoMA بهصورت شناختی وضعیت را تحلیل و تصمیم جدید صادر کرد. برای مثال، رباتها نه صرفاً مسیر جایگزین انتخاب میکردند، بلکه علت تغییر را درک میکردند («مسیر بهعلت تعمیر بسته شده») و بر اساس آن، زمانبندی جدیدی میان خود تنظیم میکردند. در نتیجه، برخلاف سیستمهای کلاسیک که بعد از هر تغییر نیاز به بازبرنامهریزی داشتند، KoMA بهصورت خودکار و بلادرنگ با محیط هماهنگ میشد.
۴. کاهش خطا و افزایش پایداری تصمیمها
یکی از چالشهای شناختهشده در سیستمهای چندرباتی، تضاد تصمیمهاست؛ یعنی زمانی که دو یا چند ربات تصمیمهایی متناقض میگیرند. KoMA با استفاده از حافظهی دانشی و منطق زبانی توانست این مشکل را به حداقل برساند. رباتها پیش از اجرای تصمیم نهایی، استدلال خود را با یکدیگر به اشتراک میگذاشتند. اگر دو تصمیم با هم در تضاد بودند، مدل زبانی با تحلیل زمینه و اولویت مأموریتها تصمیم نهایی را اعلام میکرد. این ویژگی باعث شد نرخ تضاد تصمیمها در شبکه تقریباً به صفر برسد و پایداری کل سیستم افزایش یابد.
۵. بهبود بهرهوری و صرفهجویی انرژی
KoMA با حذف توقفهای بیمورد و بهینهسازی همزمان مسیرها، منجر به کاهش مصرف انرژی و زمان مأموریت شد. در محیط واقعی، میانگین مصرف انرژی رباتها حدود ۲۵ درصد کمتر از سیستمهای کلاسیک ثبت شد. همچنین، بهدلیل تصمیمگیری هوشمند جمعی، زمان تکمیل مأموریتهای همزمان (Parallel Tasks) تا ۴۰ درصد سریعتر شد. این بهبود عملکرد در محیطهایی که دهها مأموریت در لحظه در جریان است (مانند مراکز پخش کالا یا انبارهای خردهفروشی)، تأثیر مستقیمی بر کاهش هزینههای عملیاتی و افزایش ظرفیت پردازش دارد.
۶. رفتار شناختی و یادگیری در طول زمان
یکی از جنبههای جذاب KoMA، توانایی آن در یادگیری تجربی مداوم بود. در طول چند روز آزمایش، مدل متوجه شد که برخی مسیرها در ساعات خاصی از روز شلوغترند. بر این اساس، رباتها بهصورت جمعی زمانبندی مأموریتها را تنظیم کردند تا از ازدحام جلوگیری شود. این یعنی سیستم نهتنها داده را پردازش میکند، بلکه از آن میآموزد و الگوهای جدید رفتاری خلق میکند — مشابه یادگیری انسان از تجربه.
در پایان دورهی آزمایش، سیستم KoMA بدون هیچ بازبرنامهریزی دستی، تصمیمهای هوشمندتر و سریعتری اتخاذ میکرد.
۷. پایداری شبکه و تابآوری در شرایط غیرمنتظره
یکی از آزمونهای مهم، بررسی واکنش سیستم به قطع ارتباط موقت میان چند ربات بود. برخلاف مدلهای کلاسیک که در این شرایط متوقف میشدند، KoMA توانست عملکرد خود را حفظ کند.
دلیلش آن است که دانش تصمیمگیری در KoMA توزیعشده است؛ یعنی هر ربات نسخهای از دانش جمعی را در حافظهی خود دارد و میتواند در صورت قطع ارتباط، تصمیمهای سازگار با منطق کل سیستم بگیرد.
بهاینترتیب، شبکهی KoMA حتی در شرایط خطا یا تداخل ارتباطی، دچار فروپاشی نمیشود و پایداری عملکرد خود را حفظ میکند — ویژگیای که در محیطهای صنعتی پرریسک بسیار ارزشمند است.
بهطور خلاصه، نتایج نشان دادند که KoMA موفق شد شکاف میان خودکارسازی عددی و درک دانشی را پر کند. سیستم بهجای اطاعت از دستورها، به سطحی از تفکر و استدلال رسیده است. رباتها در این چارچوب نهفقط مأموریت انجام میدهند، بلکه «میفهمند چرا باید آن مأموریت را انجام دهند» — و همین درک، کلید آیندهی لجستیک هوشمند است.
کاربردهای صنعتی و سناریوهای واقعی KoMA در رباتهای حملبار
چارچوب KoMA با ماهیت دانشی و استدلالی خود، قابلیت انطباق با محیطهای صنعتی گوناگون را دارد — از انبارهای متراکم گرفته تا بنادر، کارخانههای چندمرحلهای، خطوط تولید خودکار و حتی زیرساختهای شهری هوشمند. این بخش چند سناریوی واقعی را ترسیم میکند که نشان میدهند چگونه KoMA میتواند بنیان «هوش تصمیمساز جمعی» در رباتهای صنعتی شود.
۱. انبارهای هوشمند با تراکم حرکتی بالا
در مراکز توزیع بزرگ، دهها ربات حملبار در مسیرهایی محدود در حال حرکتاند. هر لحظه احتمال تداخل مسیرها، ازدحام یا توقف وجود دارد.
KoMA در چنین محیطی با استفاده از گفتوگوی دانشی میان رباتها، جریان ترافیک را به شکل زنده تنظیم میکند. هر ربات نه بر اساس قوانین ثابت، بلکه با استدلال موقعیتی تصمیم میگیرد که از چه مسیری عبور کند، کجا توقف کند و چه زمانی نوبت خود را به دیگری واگذار کند.
نتیجه، حرکتی کاملاً روان و بدون ترافیک است — شبکهای که همانند جریان خون در بدن، خودش مسیرها را باز و بسته میکند تا بهرهوری کلی بالا بماند.
۲. خطوط تولید چندمرحلهای و زمانبندی هوشمند مأموریتها
در خطوط تولید صنعتی، رباتهای حملبار حلقهی اتصال میان ایستگاههای کاری هستند. کوچکترین ناهماهنگی میان زمانبندی مأموریتها میتواند کل خط را مختل کند.
KoMA با درک دانشی از وضعیت ایستگاهها، اولویت مأموریتها و ظرفیت لحظهای هر بخش، وظایف را میان رباتها بهصورت پویا تقسیم میکند.
برای مثال، اگر ایستگاه مونتاژ دچار تأخیر شود، سیستم فوراً مأموریتهای تغذیهی آن بخش را کاهش داده و در عوض ظرفیت حمل در مسیرهای دیگر را افزایش میدهد.
این تصمیمها بدون نیاز به اپراتور انسانی و بر پایهی «درک منطقی از وضعیت تولید» انجام میشوند، نه صرفاً الگوریتمهای ریاضی.
۳. بنادر و پایانههای کانتینری هوشمند
در بنادر مدرن که صدها ربات حملبار (AGV) بهطور همزمان در حال جابهجایی کانتینرها هستند، کوچکترین خطای تصمیمگیری میتواند منجر به تأخیرهای گسترده شود.
KoMA با فراهمکردن یک لایهی زبانی–دانشی میان وسایل نقلیه، آنها را قادر میسازد دربارهی مسیرها، زمانبندی و اولویتهای بارگیری گفتوگو کنند. هر وسیله بهصورت مستقل و آگاه از وضعیت دیگران تصمیم میگیرد. در نتیجه، تصمیمهای اشتراکی جایگزین کنترل مرکزی میشود.
این همکاری زبانی باعث میشود سیستم بتواند در لحظه به تغییرات آبوهوایی، ترافیک یا اولویتهای اضطراری پاسخ دهد — ویژگیای حیاتی در بنادر پویا و زنجیرههای تأمین جهانی.
۴. همکاری انسان و ربات در محیطهای نیمهساختاریافته
در کارخانهها و انبارهایی که انسانها در کنار رباتها کار میکنند، هماهنگی حرکتی میان آنها یک چالش جدی است. KoMA با تکیه بر مدل زبانی خود، به رباتها امکان میدهد رفتار انسانها را درک کنند — مثلاً با تشخیص حرکات دست، زبان بدن یا دستورهای صوتی ساده.
در این مدل، انسان و ربات از طریق یک زبان مشترک تعامل میکنند، نه از طریق دستورهای فنی پیچیده.
نتیجه، همکاری طبیعیتر، ایمنتر و مؤثرتر میان نیروی انسانی و ناوگان رباتهاست؛ همکاریای که نه بر مبنای کنترل، بلکه بر پایهی فهم متقابل بنا شده است.
۵. شبکههای لجستیکی میانکارخانهای و اکوسیستمهای صنعتی هوشمند
KoMA میتواند فراتر از مرز یک کارخانه عمل کند و شبکهای از کارخانهها، انبارها و مراکز توزیع را در یک سیستم دانشی مشترک به هم متصل کند.
در چنین ساختاری، هر مجموعهی صنعتی بهجای عمل مستقل، بخشی از یک شبکهی شناختی واحد خواهد بود.
رباتهای هر واحد با استفاده از زبان مشترک KoMA میتوانند مأموریتها را میان کارخانهها بازتوزیع کنند، بارها را بهینه حمل کنند و مسیرهای حملونقل میانسازمانی را هماهنگ سازند.
این مفهوم، پایهگذار زنجیرههای تأمین خودآگاه (Cognitive Supply Chains) است که در آن تصمیمگیری بهصورت بلادرنگ و جمعی انجام میشود.
۶. مراکز بستهبندی سریع و تحویل هوشمند
در صنایع لجستیک و تجارت الکترونیک که سرعت پردازش سفارشها حیاتی است، KoMA میتواند نقش هماهنگکنندهی کل شبکهی رباتهای بستهبندی را ایفا کند.
سیستم با تحلیل زبانی از وضعیت سفارشات و اولویت مشتریان، مأموریتهای رباتها را در لحظه بازتنظیم میکند.
برای مثال، اگر در یک منطقه حجم سفارشها افزایش یابد، KoMA بهصورت خودکار بخشی از ناوگان را از بخشهای کمکارتر به آن منطقه منتقل میکند.
این انطباق لحظهای موجب افزایش ظرفیت پاسخگویی و کاهش زمان تحویل میشود — عاملی حیاتی برای حفظ رقابتپذیری در لجستیک مدرن.
۷. صنایع سنگین و محیطهای پرریسک
در محیطهای خطرناک مانند معادن، پالایشگاهها و کارخانههای فولاد، تصمیمگیری سریع و دقیق رباتها میتواند از وقوع حادثه جلوگیری کند.
KoMA با درک موقعیتهای اضطراری از طریق دادههای چندمنبعی (مانند دما، لرزش یا نشت مواد) و ترجمهی آنها به استدلالهای دانشی، تصمیمهای ایمنی بلادرنگ اتخاذ میکند.
اگر یکی از رباتها شرایط خطرناک را شناسایی کند، دیگران از طریق ارتباط زبانی مطلع شده و مأموریت خود را بازتنظیم میکنند.
این یعنی یک سیستم ایمنی خوداستدلالی که میتواند بدون مداخلهی انسانی واکنش مناسب نشان دهد.
بهطور خلاصه، KoMA پلی است میان کنترل فنی و هوش شناختی در صنعت. این چارچوب باعث میشود رباتها از سطح «اجرای فرمان» به سطح «درک مأموریت» برسند.
در جهانی که لجستیک و تولید در حال تبدیل شدن به اکوسیستمهایی متصل و پویا هستند، KoMA مسیر ورود صنعت به عصر تصمیمگیری دانشی و گفتوگومحور را هموار میکند — جایی که ماشینها نهتنها کار میکنند، بلکه با یکدیگر فکر میکنند.
جمعبندی استراتژیک و مزیتهای رقابتی KoMA برای آیندهی صنعت
در چشمانداز صنعتی آینده، موفقیت دیگر تنها به سرعت تولید یا دقت عملیات وابسته نیست، بلکه به میزان درک، هماهنگی و خودتصمیمگیری سیستمها بستگی دارد. در این میان، KoMA را میتوان نخستین گام واقعی بهسوی هوش سازمانی صنعتی (Industrial Organizational Intelligence) دانست؛ چارچوبی که داده، معنا و تصمیم را در یک حلقهی دانشی به هم پیوند میدهد و از مجموعهای از رباتها، یک «جامعهی هوشمند» میسازد.
۱. KoMA بهعنوان زیرساخت فکری صنعت ۵.۰
در عصر صنعت ۵.۰، هدف صرفاً خودکارسازی نیست، بلکه همکاری انسان و ماشین در تصمیمگیریهای هوشمند است. KoMA دقیقاً این همکاری را ممکن میسازد.
در این ساختار، رباتها با انسانها در یک زبان مشترک گفتوگو میکنند؛ دادههای خام را به استدلال قابل فهم تبدیل مینمایند و از دانش سازمانی برای تصمیمهای بلادرنگ استفاده میکنند.
این یعنی سازمانها دیگر نیاز به لایههای متعدد مدیریتی و کنترل مرکزی ندارند — زیرا تصمیمها در لایهی عملیاتی، و با درک واقعی از وضعیت محیط اتخاذ میشوند.
KoMA با فراهمکردن این زیرساخت دانشی، مسیر انتقال از «اتوماسیون» به «آتوآگاهی» را هموار میکند. هر ربات بخشی از مغز سازمان است و کل سیستم همانند ذهنی جمعی عمل میکند.
نتیجهی این تحول، ظهور کارخانهها و انبارهایی است که نهتنها کارآمد، بلکه خودآگاه و یادگیرنده هستند — موجوداتی صنعتی که خود را میفهمند، تحلیل میکنند و اصلاح مینمایند.
۲. مزیت رقابتی بر پایهی هوش دانشی
در اقتصاد امروز، مزیت رقابتی سازمانها در سرعت تصمیمگیری نهفته است. هر تأخیر در تصمیم، به معنای از دست دادن فرصت است.
KoMA با تبدیل فرآیند تصمیمسازی به تصمیمگیری خودکار دانشی، این تأخیر را از میان برمیدارد.
سیستم نه منتظر فرمان مدیریتی میماند و نه به ارتباط پیوسته با سرور مرکزی نیاز دارد. هر ربات بر اساس دانش جمعی، بهترین تصمیم ممکن را در همان لحظه میگیرد.
این خودکفایی دانشی منجر به افزایش بهرهوری تا دهها درصد، کاهش هزینههای ارتباطی و افزایش سرعت واکنش در شرایط بحرانی میشود.
از سوی دیگر، KoMA دادههای تولیدشده را به سرمایهی دانشی تبدیل میکند. هر مأموریت، هر خطا و هر تصمیم در حافظهی سیستم ثبت میشود و به شکل تجربهای برای آینده مورد استفاده قرار میگیرد. این چرخهی یادگیری، ارزش سازمان را با گذشت زمان افزایش میدهد؛ یعنی هرچه سیستم بیشتر کار کند، باهوشتر و کارآمدتر میشود.
۳. انعطافپذیری، پایداری و تابآوری صنعتی
در دنیای واقعی، پایداری یکی از کلیدیترین شاخصهای عملکرد است. سیستمهای سنتی با کوچکترین اختلال در ارتباط یا خطای ربات دچار فروپاشی عملکردی میشوند.
اما KoMA با ساختار توزیعشدهی خود، این وابستگی را از بین میبرد. دانش تصمیمگیری در میان رباتها تقسیم شده است، بنابراین اگر یکی از آنها از کار بیفتد، بقیه میتوانند وظایفش را بر اساس حافظهی دانشی سیستم ادامه دهند.
این ویژگی، KoMA را به یکی از مقاومترین چارچوبها برای محیطهای صنعتی ناپایدار تبدیل کرده است — بهویژه در صنایعی که زمان توقف (Downtime) هزینهی سنگینی دارد.
علاوه بر پایداری، KoMA انعطافپذیری ذاتی دارد. افزودن رباتهای جدید نهتنها پیچیدگی سیستم را افزایش نمیدهد، بلکه بهواسطهی گسترش پایگاه دانش، دقت تصمیمگیری را بیشتر میکند. این پدیده که از آن با عنوان “Networked Intelligence Expansion” یاد میشود، باعث میشود KoMA همراه با رشد سازمان، خود نیز تکامل یابد.
۴. پیوند انسان، داده و تصمیم
یکی از مزیتهای کلیدی KoMA در ایجاد یک زبان مشترک میان انسان و ربات است.
در ساختارهای سنتی، تعامل انسان با سیستم از طریق کد یا واسط گرافیکی انجام میشد؛ اما در KoMA، اپراتور میتواند با زبان طبیعی با شبکه گفتوگو کند.
بهجای برنامهنویسی، مدیر تولید میگوید:
«مسیر بارگیری ۳ بیش از حد شلوغ شده، رباتها را بازتوزیع کن.»
و سیستم با استدلال زبانی این دستور را تحلیل کرده و تصمیم بهینهای اتخاذ میکند.
این سطح از ارتباط معنایی، نهتنها بهرهوری را بالا میبرد بلکه موجب اعتماد بیشتر انسانها به فناوری و پذیرش گستردهتر آن در محیطهای کاری میشود.
۵. چشمانداز رقابتی و آیندهی لجستیک هوشمند
در سطح کلان، سازمانهایی که KoMA را پیادهسازی کنند، وارد مرحلهای از بلوغ دیجیتال میشوند که در آن تصمیمها نهفقط سریعتر، بلکه هوشمندتر و قابل توضیحتر هستند.
در دنیایی که لجستیک جهانی بهسمت پیچیدگی و عدم قطعیت بیشتر پیش میرود، تنها سیستمهایی میتوانند بقا یابند که قادر به استدلال، یادگیری و انطباق سریع باشند. KoMA دقیقاً این سه ویژگی را در خود دارد.
در حقیقت، این چارچوب میتواند ستون فکری صنعت ۵.۰ باشد — صنعتی که در آن دادهها به دانش، دانش به بینش، و بینش به تصمیمهای خودکار و آگاهانه تبدیل میشود.
به زبان ساده، KoMA نه صرفاً یک پیشرفت فنی، بلکه مدل تفکر آیندهی صنعت است: صنعتی که نه بر پایهی کنترل، بلکه بر اساس فهم جمعی و گفتوگوی میان ماشینها بنا شده است.
نتیجهگیری نهایی، دعوت به اقدام و رفرنس دقیق
جهان صنعتی در آستانهی تحولی است که در آن داده، زبان و تصمیم در هم آمیختهاند. چارچوب KoMA نشان داده است که آیندهی رباتیک و لجستیک نه صرفاً در خودکارسازی عملیات، بلکه در درک، استدلال و همکاری دانشی میان ماشینها نهفته است.
این مقاله با معرفی معماری چندعاملی مبتنی بر مدلهای زبانی بزرگ (LLMs)، گامی اساسی بهسوی خلق «مغز جمعی رباتیک» برداشته است؛ مغزی که در آن هر ربات حامل بخشی از دانش کل سیستم است و از طریق گفتوگوی زبانی و استدلال دانشی، هماهنگی طبیعی و بلادرنگ ایجاد میکند.
در KoMA، رباتها دیگر مجری فرمان نیستند، بلکه شریک تصمیمسازیاند. آنها میفهمند، تحلیل میکنند، و از تجربه میآموزند.
در نتیجه، سیستمهای لجستیکی از ساختارهای ایستا و فرمانپذیر به اکوسیستمهایی زنده، پویا و خودتنظیم تبدیل میشوند.
در این الگو، داده تنها ابزار نیست؛ داده، زبان گفتوگوی ماشینهاست. تصمیمها نه از بالا به پایین، بلکه از درون شبکه و از طریق استدلال جمعی شکل میگیرند. این همان نقطهای است که صنعت از «هوش مصنوعی» عبور کرده و به مرحلهی هوش دانشی مشارکتی (Collaborative Knowledge Intelligence) وارد میشود.
از دیدگاه صنعتی، KoMA میتواند در چند حوزه تأثیرگذار باشد:
مدیریت لجستیک هوشمند: کاهش تراکم مسیرها، افزایش بهرهوری و بهبود هماهنگی در انبارها.
تولید خودتنظیم: انطباق پویا میان تولید، مونتاژ و حملونقل در خطوط صنعتی.
همکاری انسان–ربات: ایجاد زبان مشترک میان اپراتورها و ماشینها.
پایداری و تابآوری صنعتی: عملکرد پایدار حتی در شرایط ارتباطی نامطمئن.
اما فراتر از این مزایا، KoMA یک تغییر پارادایمی در نحوهی تفکر دربارهی رباتها ایجاد میکند. رباتها دیگر ابزار نیستند، بلکه اعضای یک جامعهی دیجیتالاند که توانایی یادگیری، تحلیل و تصمیم جمعی دارند.
این تغییر نگرش، سنگبنای ورود به عصر صنعت ۵.۰ است — عصری که در آن انسان، ماشین و داده در یک اکوسیستم فکری یکپارچه زندگی و کار میکنند.
دعوت به اقدام
امروز زمان آن رسیده است که صنایع گام عملی بهسوی ادغام KoMA در عملیات خود بردارند.
شرکتهای فعال در حوزههای لجستیک، تولید و رباتیک باید پروژههای آزمایشی (Pilot Projects) بر پایهی KoMA را آغاز کنند؛ پروژههایی که از ادغام مدلهای زبانی، شبکههای ارتباطی صنعتی و رباتهای هوشمند بهره میبرند.
این گام، اولین حرکت بهسوی ساخت کارخانههایی است که میفهمند، با هم گفتوگو میکنند و خود را بهینه میسازند.
پیشنهاد میشود مراکز تحقیقاتی، دانشگاهها و شرکتهای فناوری به توسعهی نسخههای بومی و سبکشدهی KoMA برای محیطهای صنعتی داخلی بپردازند.
آیندهی رقابت جهانی متعلق به سازمانهایی است که داده را به زبان، و زبان را به تصمیم تبدیل میکنند.
رفرنس مقاله
Zhenyu Zhang, Zhiyuan Hu, Zhenyu Wu, and Hang Zhao,
“KoMA: Knowledge-driven Multi-agent Framework for Autonomous Driving with Large Language Models,”
IEEE Transactions on Intelligent Vehicles, vol. 9, no. 2, 2024, pp. 1348–1365.*
DOI: 10.1109/TIV.2024.3275784



{kind=link}
بدون نظر