

همزیستی هوشمند انسان و رباتهای حملبار خودکار: مسیر نوین ایمنی، بهرهوری و پایداری در کارخانههای آینده
تا همین یک دهه پیش، حضور همزمان انسان و ربات در یک محیط کاری صنعتی، یک خطر جدی و خط قرمز ایمنی محسوب میشد. در کارخانههای سنتی، رباتها پشت حصارهای فلزی کار میکردند و انسانها از فاصلهی دور بر عملکردشان نظارت داشتند. اما با ورود نسل جدید رباتهای خودران و هوشمند — بهویژه رباتهای حملبار خودکار (AGV) و رباتهای متحرک هوشمند (AMR) — این دیوار نامرئی میان انسان و ماشین در حال فرو ریختن است.
امروز دیگر انسان و ربات نه در دو دنیای جدا، بلکه در یک فضای کاری مشترک فعالیت میکنند. رباتها در کنار کارگران حرکت میکنند، مسیرهایشان را تطبیق میدهند، بارها را منتقل میکنند و حتی با درک رفتار انسانی، تصمیمهای بلادرنگ میگیرند. این تحول، مفهوم جدیدی به نام “همزیستی انسان–ربات” (Human–Robot Coexistence) را وارد دنیای صنعت کرده است؛ مفهومی که در قلب تحول صنعتی نسل پنجم، Industry 5.0، قرار دارد.
در گذشته، محور اصلی طراحی رباتهای صنعتی سرعت، دقت و تکرارپذیری بود، اما در عصر کنونی، محور جدیدی به این سه معیار اضافه شده است: درک انسانی (Human Understanding). رباتهای حملبار باید بتوانند حضور، رفتار و حتی نیت حرکتی انسان را تفسیر کنند تا بتوانند با او همکاری ایمن و مؤثر داشته باشند. بهعبارتی، از دیدگاه جدید، هوشمند بودن ربات نه به قدرت محاسبه، بلکه به توانایی تعاملش با انسان تعریف میشود.
در محیطهای مدرن مانند انبارهای خودکار، مراکز توزیع و کارخانههای تولید ترکیبی، تعامل میان انسان و ربات به سطحی رسیده که دیگر مرز روشنی بین نقشهای انسانی و ماشینی وجود ندارد. اپراتور انسانی ممکن است در همان مسیری حرکت کند که چند AGV مشغول حمل بار هستند، یا رباتی در فاصلهی کمتر از یک متر از انسان، مأموریت خود را انجام دهد. در چنین فضاهایی، ایمنی (Safety) و اعتماد (Trust) به کلیدهای اصلی موفقیت سیستم تبدیل شدهاند.
از سوی دیگر، حضور انسان در کنار ربات نه تنها بهعنوان یک چالش، بلکه بهعنوان یک فرصت دیده میشود. برخلاف اتوماسیون کامل که سعی در حذف انسان از فرآیند داشت، Industry 5.0 انسان را دوباره به مرکز فرآیند بازمیگرداند. این نسل از صنعت بر “همافزایی انسان و ماشین” (Human–Machine Synergy) تأکید دارد؛ جایی که هوش انسانی و توان فیزیکی ربات با هم ترکیب میشوند تا بهرهوری و کیفیت کار به حداکثر برسد.
با این حال، این همزیستی نیازمند تعادل دقیق میان سرعت، ایمنی و درک متقابل است. اگر ربات بیش از حد محتاط باشد، سرعت عملیات کاهش مییابد؛ و اگر بیش از حد تهاجمی عمل کند، امنیت انسانها به خطر میافتد. همین موضوع چالشی عمیق برای طراحان سامانههای حملبار خودکار ایجاد کرده است:
چگونه میتوان سیستمی طراحی کرد که هم سریع و کارآمد باشد، هم ایمن و قابل اعتماد برای انسان؟
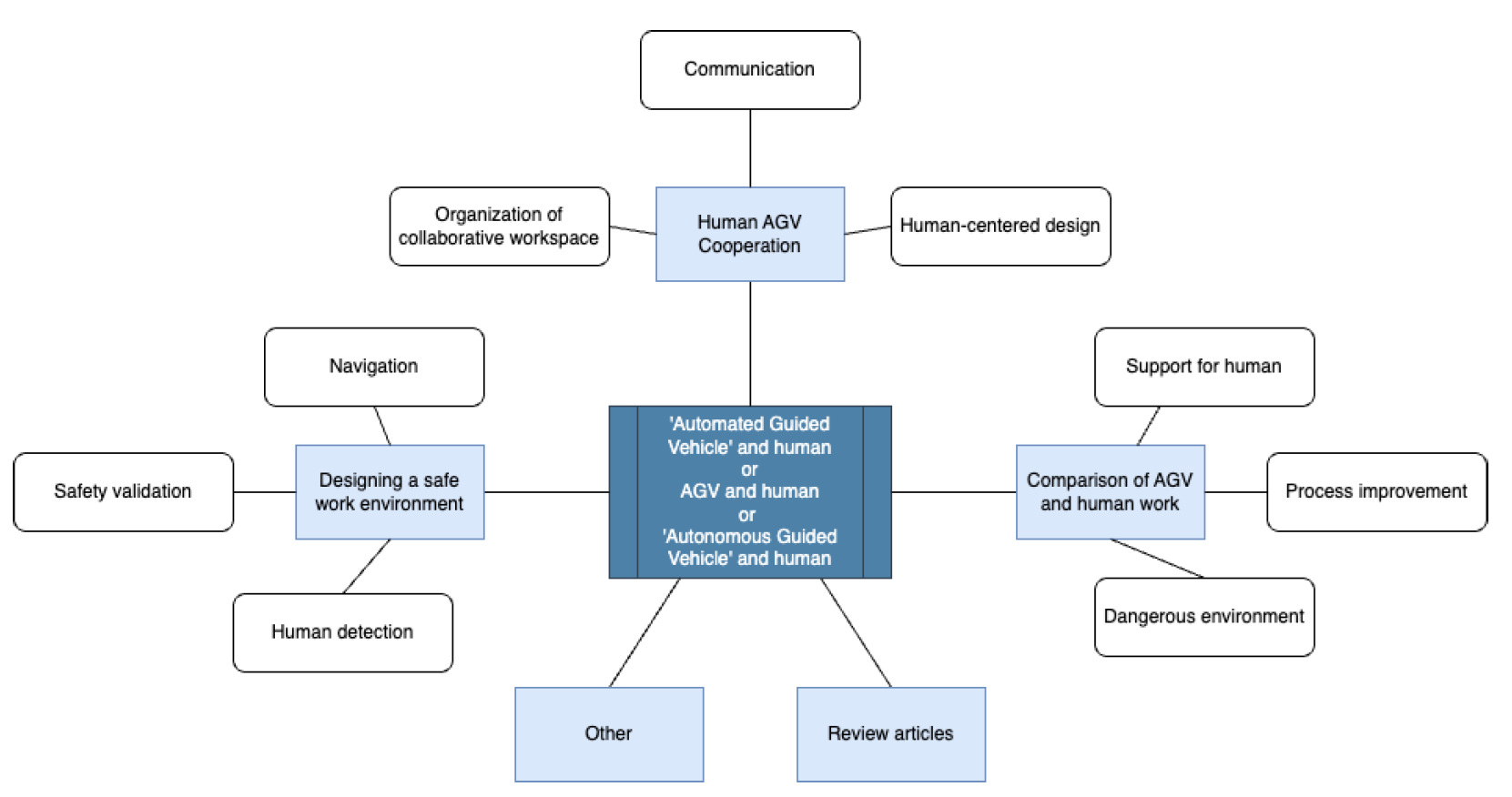
مقالهی حاضر، با تحلیل جامع پژوهشهای انجامشده در این حوزه، دقیقاً به دنبال پاسخ همین پرسش است. پژوهشگران تلاش کردهاند تا با بررسی بیش از صد مقالهی علمی و صنعتی، چشمانداز کاملی از وضعیت فعلی، فرصتها و کمبودهای پژوهشی در زمینهی همکاری انسان و ربات در محیطهای مشترک ارائه دهند.
این مقاله در حقیقت نقشهای برای آینده است — آیندهای که در آن کارخانهها، نه صرفاً مکانهایی برای تولید، بلکه فضاهای اشتراکی میان انسان و ربات خواهند بود. جایی که تعامل، ارتباط و اعتماد جایگزین جدایی، محدودیت و ترس میشوند.
چالشهای فعلی در تعامل انسان و رباتهای حملبار خودکار
همزیستی میان انسان و رباتهای حملبار در محیطهای صنعتی، اگرچه نویدبخش آیندهای هوشمند و کارآمد است، اما هنوز با مجموعهای از چالشهای پیچیده و چندبعدی روبهرو است. این چالشها تنها فنی نیستند، بلکه در لایههای انسانی، سازمانی و رفتاری نیز وجود دارند. در عمل، مسئلهی تعامل ایمن انسان و ربات نه فقط یک مسئلهی مهندسی، بلکه نوعی مسئلهی اجتماعی–فناورانه است که باید در چهار بُعد کلیدی بررسی شود: ایمنی فیزیکی، درک حرکتی، اعتماد انسانی، و تطبیق سازمانی.
چالش نخست: ایمنی حرکتی در محیطهای پویا
اصلیترین دغدغه در هر محیط مشترک، ایمنی فیزیکی انسانها در برابر حرکت خودکار رباتها است. برخلاف محیطهای کنترلشدهی صنعتی کلاسیک، در کارخانههای مدرن و انبارهای هوشمند، مسیر حرکت انسان و ربات بهصورت پویا تغییر میکند و پیشبینی دقیق رفتار هر دو طرف دشوار است.
رباتهای حملبار خودکار، حتی با استفاده از لیدار، دوربین سهبعدی و نقشههای SLAM، هنوز نمیتوانند تمامی حالتهای حرکتی انسان را با دقت بالا پیشبینی کنند. رفتار انسانی ذاتاً غیرقابلپیشبینی است — گاهی کارگر مسیرش را ناگهانی تغییر میدهد، گاهی در یک نقطه میایستد یا به سمت عقب برمیگردد. این رفتارها اگر توسط سیستمهای کنترل حرکتی رباتها بهدرستی شناسایی نشوند، میتوانند باعث برخورد، توقف ناگهانی یا حتی حوادث خطرناک شوند.
از سوی دیگر، الزامات قانونی مانند استانداردهای ISO 3691-4 و ISO/TS 15066، رباتها را ملزم کردهاند تا در فضاهای اشتراکی، سرعت و مسیر خود را بهصورت پویا تنظیم کنند. اما اجرای این الزامات در عمل، توازن دشواری را بین ایمنی و بهرهوری ایجاد کرده است. رباتهایی که بیش از حد محتاط باشند، جریان کاری را کند میکنند، و رباتهایی که بیش از حد جسورانه رفتار کنند، خطر تصادف را افزایش میدهند. یافتن این نقطهی تعادل، یکی از چالشهای اصلی طراحان سیستمهای حملبار هوشمند است.
چالش دوم: درک متقابل رفتار انسان و ربات
برای آنکه همکاری واقعی میان انسان و ربات شکل بگیرد، کافی نیست که ربات صرفاً “به انسان واکنش نشان دهد”؛ بلکه باید رفتار او را درک کند. بسیاری از سیستمهای AGV فعلی هنوز فاقد مدلی از رفتار انسانی هستند و صرفاً بر اساس فاصله یا موقعیت جسمی تصمیم میگیرند. این نگاه «فیزیکی و سطحی» باعث میشود رباتها نتوانند نیت حرکتی یا هدف کاری انسان را پیشبینی کنند.
برای مثال، وقتی یک اپراتور در حال برداشتن قطعهای از قفسه است، ربات باید تشخیص دهد که او فقط برای چند ثانیه در مسیر ایستاده و نباید مسیر خود را تغییر دهد. اما اگر اپراتور در حال راه رفتن به سمت منطقهی دیگر باشد، ربات باید مسیر جایگزین انتخاب کند. چنین تصمیمهایی مستلزم درک زمینهای از رفتار انسانی (Contextual Human Behavior Understanding) است — حوزهای که هنوز بهصورت کامل در رباتهای صنعتی پیادهسازی نشده است.
چالش سوم: اعتماد شناختی و پذیرش انسانی
حتی اگر رباتها از نظر فنی کاملاً ایمن باشند، همکاری مؤثر بدون اعتماد انسانی (Human Trust) ممکن نیست. پژوهشها نشان میدهند که در بسیاری از کارخانهها، کارگران انسانی هنوز به رباتهای خودران اعتماد کامل ندارند. برخی از آنها احساس خطر میکنند، برخی دیگر از حرکات سریع یا بیصدا شدن ناگهانی رباتها دچار اضطراب میشوند، و گروهی به دلیل نبود شفافیت در تصمیمگیری رباتها، از کار در مجاورت آنها احساس ناامنی دارند.
ایجاد اعتماد به رباتها نیازمند طراحی رفتاری جدید است. ربات باید بتواند قابلپیشبینی، قابلفهم و شفاف عمل کند؛ یعنی کارگر انسانی بتواند از روی حرکت و واکنشهای آن، تصمیم بعدیاش را حدس بزند. این همان چیزی است که در ادبیات پژوهش به آن Behavioral Transparency گفته میشود. به عبارت سادهتر، ربات باید “رفتار اجتماعی” داشته باشد — مثلاً با چراغ، صدا یا زبان بدن (حرکات واضح و نرم) حضور و نیت خود را به انسان اطلاع دهد.
چالش چهارم: سازگاری سازمانی و فرآیندی
تعامل انسان و ربات تنها در سطح فناوری اتفاق نمیافتد؛ بلکه در فرهنگ سازمانی و طراحی فرآیندها نیز تأثیر میگذارد. بسیاری از کارخانهها هنوز ساختار خطی و جدا از هم برای کارگران و رباتها دارند. اما محیطهای اشتراکی به طراحی کاملاً جدیدی از جریان کاری نیاز دارند — جایی که مسیرها، وظایف و حتی زمانبندی عملیاتها بر اساس رفتار هر دو طرف تنظیم شوند.
پیادهسازی این ساختار جدید نیازمند همکاری نزدیک میان مهندسان رباتیک، طراحان فرآیند، کارشناسان ایمنی و حتی روانشناسان صنعتی است. در واقع، مسئلهی تعامل انسان و ربات دیگر تنها یک پروژهی مهندسی نیست، بلکه یک پروژهی چندرشتهای (Interdisciplinary Transformation) است که نیازمند درک همزمان از فناوری، رفتار و فرهنگ کاری است.
چالش پنجم: ارزیابی و استانداردسازی
در حال حاضر، هیچ استاندارد واحدی برای ارزیابی «کیفیت تعامل» میان انسان و ربات وجود ندارد. بیشتر معیارهای موجود بر مبنای فاصلهی ایمن یا سرعت توقف تعریف میشوند، در حالی که جنبههای شناختی مانند سطح اعتماد، درک متقابل و تجربهی روانی کاربر نادیده گرفته میشود. نبود این معیارها باعث میشود که شرکتها نتوانند بهصورت دقیق، کارایی سیستمهای اشتراکی خود را بسنجند یا بهبود دهند.
پژوهش مقاله نشان میدهد که صنعت نیازمند چارچوبهای جدیدی است که تعامل انسان–ربات را نه فقط از منظر ایمنی، بلکه از منظر کیفیت همکاری (Quality of Collaboration) بررسی کند. این شامل معیارهایی مثل میزان سازگاری رفتار ربات با حرکات انسان، رضایت اپراتور، نرخ توقفهای غیرضروری و میزان اعتماد احساسی کاربران است.
در مجموع، میتوان گفت که صنعت امروز در نقطهای قرار دارد که فناوری رباتهای خودران به بلوغ رسیده، اما درک انسانی از تعامل با آنها هنوز در حال شکلگیری است. برای حرکت به سمت کارخانههای نسل ۵، باید شکاف میان هوش فنی و هوش اجتماعی رباتها پر شود. تنها در این صورت است که میتوان محیطی ساخت که انسان و ربات نه صرفاً همزمان، بلکه هماهنگ، ایمن و همفکر در آن کار کنند.
دیدگاه نوآورانه مقاله و مسیر جدید همکاری انسان–ربات
نوآوری مقاله نه در معرفی یک الگوریتم خاص یا سیستم سختافزاری جدید، بلکه در بازتعریف فلسفهی همکاری انسان و ربات در محیطهای صنعتی است. این پژوهش با بررسی جامع بیش از صد منبع علمی از سالهای ۲۰۱۰ تا ۲۰۲۴، نشان داده که آیندهی همکاری انسان–ربات تنها در افزایش دقت سنسورها یا قدرت هوش مصنوعی خلاصه نمیشود؛ بلکه در ایجاد نوعی درک متقابل شناختی (Cognitive Understanding) میان انسان و ربات نهفته است — درکی که در آن هر دو طرف رفتار یکدیگر را پیشبینی و تفسیر میکنند.
این مقاله، برای نخستینبار، مفهوم «همزیستی فعال» (Active Coexistence) را در محیطهای مشترک انسان–AGV معرفی کرده است؛ مفهومی که سه ویژگی اساسی دارد: ادراک انسانی در سطح ربات، رفتار اجتماعی در تصمیمگیری حرکتی، و یادگیری متقابل از تعاملهای واقعی. در ادامه، این سه ستون بهعنوان پایهی تفکر نوآورانه مقاله تشریح میشوند.
۱. ادراک انسانی در سطح ربات
در نسل جدید رباتهای صنعتی، صرفِ تشخیص حضور انسان کافی نیست؛ ربات باید بتواند رفتار، نیت و هدف انسانی را درک کند. مقاله با تحلیل پژوهشهای تجربی اخیر نشان میدهد که موفقترین سیستمهای همکاری انسان–AGV از ترکیب دادههای چندمنبعی (Multimodal Data) مانند موقعیت بدن، جهت نگاه، سرعت حرکت، و حتی حرکات دست استفاده میکنند تا بتوانند احتمال گام بعدی انسان را پیشبینی کنند.
در این چارچوب، هوش ادراکی (Perceptual Intelligence) بهعنوان قلب سیستم معرفی میشود. این لایه به ربات اجازه میدهد بین حرکات “تصادفی” و “هدفمند” انسان تمایز قائل شود. بهعنوان مثال، اگر اپراتور صرفاً از کنار مسیر عبور کند، ربات با فاصلهی ایمن عبور میکند؛ اما اگر حرکات بدن او نشان دهد قصد ورود به مسیر ربات را دارد، سیستم بهصورت خودکار مسیر خود را تغییر میدهد.
چنین سطحی از درک انسانی، نه تنها احتمال برخورد را کاهش میدهد بلکه باعث میشود انسانها احساس امنیت بیشتری از همکاری با رباتها داشته باشند. در واقع، ربات با درک بهتر از نیت انسانی، بهنوعی “رفتار پیشبینانه” پیدا میکند؛ رفتاری که از واکنش صرف فراتر میرود و وارد مرحلهی پیشنگری شناختی (Cognitive Anticipation) میشود.
۲. رفتار اجتماعی در تصمیمگیری حرکتی
دومین دیدگاه کلیدی مقاله این است که رباتها باید از الگوهای رفتاری انسانی برای اجتماعی شدن در محیط کار الگوبرداری کنند. در واقع، رفتار حرکتی رباتها نباید صرفاً منطقی و عددی باشد، بلکه باید برای انسانها “قابلفهم” و “قابل پیشبینی” بهنظر برسد.
بهعنوان نمونه، مقاله توضیح میدهد که در یک مسیر اشتراکی، اگر AGV قصد عبور از کنار یک انسان را دارد، بهتر است مسیر خود را با یک انحنای نرم و زاویهی ملایم تنظیم کند، تا حس همزیستی ایمن ایجاد شود. یا اگر در حال نزدیک شدن به کارگر است، از زبان بدن رباتیک (Robotic Body Language) — مثلاً کاهش سرعت، تغییر جهت یا چشمکزدن چراغهای هشدار — برای بیان قصد خود استفاده کند.
این سطح از “رفتار اجتماعی ربات” سبب میشود انسانها بهصورت ناخودآگاه حرکات ربات را درک کرده و هماهنگی طبیعیتری شکل گیرد. در واقع، مقاله بر این باور است که در محیطهای اشتراکی، ربات باید از “منطق ماشینمحور” به سمت “منطق اجتماعی” حرکت کند. به زبان سادهتر: ربات خوب، رباتی است که قابل پیشبینی باشد. این پیشبینیپذیری، زیربنای شکلگیری اعتماد شناختی در محیط کار مشترک است.
۳. یادگیری متقابل از تعاملهای واقعی
سومین ستون نوآورانه مقاله، ایجاد چرخهی یادگیری مشترک میان انسان و ربات است. در سیستمهای کنونی، معمولاً ربات یاد میگیرد و انسان صرفاً تطبیق پیدا میکند؛ اما در مدل پیشنهادی مقاله، یادگیری دوطرفه (Bidirectional Learning) مطرح میشود. یعنی نهتنها رباتها از رفتار انسانها یاد میگیرند، بلکه سیستم به انسان نیز بازخورد قابل درک ارائه میدهد تا رفتار او هم در گذر زمان هماهنگتر شود.
برای مثال، اگر اپراتور در مسیر اشتباه بایستد، ربات بهجای توقف کامل یا هشدار صوتی، با یک حرکت ملایم و تغییر جهت، پیام غیرکلامی ارسال میکند که “من مسیر دارم، لطفاً فاصله بگیر.” این نوع بازخورد فیزیکی باعث میشود انسان بهمرور از الگوهای حرکتی ربات آگاه شود و بدون نیاز به آموزش رسمی، رفتار خود را با سیستم سازگار کند.
مقاله تأکید میکند که این چرخهی یادگیری مشترک باید بر پایهی دادههای بلادرنگ و تعامل واقعی در محیط شکل بگیرد، نه صرفاً مدلسازی در شبیهسازیها. در چنین مدلی، کارخانه به یک اکوسیستم یادگیرنده (Learning Ecosystem) تبدیل میشود که در آن هر تعامل، بخشی از فرآیند یادگیری جمعی است.
ادغام سه محور در یک چارچوب شناختی
در نهایت، مقاله این سه محور — ادراک انسانی، رفتار اجتماعی و یادگیری متقابل — را در قالب یک چارچوب جامع همکاری انسان–ربات تلفیق میکند که میتواند مبنای طراحی نسل بعدی سیستمهای حملبار هوشمند باشد. این چارچوب نهتنها در حوزهی AGV، بلکه در همهی سیستمهای مشترک انسان–ماشین (از بازوهای همکار تا رباتهای مونتاژ) قابل تعمیم است.
در این مدل، همکاری انسان و ربات دیگر صرفاً در سطح تبادل اطلاعات یا اجتناب از برخورد نیست، بلکه به سطحی از تعامل شناختی (Cognitive Interaction) ارتقا یافته است؛ سطحی که در آن هر دو طرف درک و پیشبینی از رفتار یکدیگر دارند.
ارزش اجرایی و کاربرد صنعتی رویکرد مقاله
مطالعهی انجامشده در این مقاله، فقط یک مرور تئوریک نیست؛ بلکه بر پایهی تجربهی بیش از ۱۰۰ پروژهی واقعی در کارخانهها، انبارها و محیطهای لجستیکی اروپایی و آسیایی انجام شده است. هدف آن روشن است: شناسایی بهترین راهکارها برای همکاری ایمن، کارآمد و قابل اعتماد میان انسانها و رباتهای حملبار خودکار (AGV/AMR) در فضای کاری مشترک.
در شرایط فعلی، بسیاری از شرکتها به سمت استفاده از رباتهای حملبار رفتهاند، اما در مرحلهی اجرا با مشکلات مشابهی روبهرو میشوند:
نبود درک رفتاری متقابل میان اپراتور انسانی و رباتها؛
ترس یا بیاعتمادی کارکنان نسبت به رباتهای متحرک؛
توقفهای غیرضروری ناشی از احتیاط بیش از حد سیستمهای ایمنی؛
و ضعف در طراحی ارتباط میان کارگر و ربات در مسیرهای کاری اشتراکی.
این مقاله دقیقاً این نقاط ضعف را هدف گرفته و سه خروجی کلیدی برای کاربرد در محیط صنعتی واقعی ارائه میدهد:
۱. چارچوب طراحی ایمنی برای فضاهای اشتراکی
مطالعه نشان میدهد که طراحی ایمنی بین انسان و ربات باید فراتر از محدود کردن مسیر حرکت باشد. سیستمهای جدید باید بر اساس مدل رفتاری انسانها ساخته شوند. یعنی ربات باید بتواند از روی سرعت حرکت، جهت نگاه یا موقعیت بدن کارگر، نیت او را حدس بزند و مسیر خود را تطبیق دهد.
با این مدل، کارخانهها میتوانند نواحی کاری مشترک (Shared Zones) بسازند که در آن انسان و ربات بدون خطر برخورد، در فاصلهی نزدیک فعالیت کنند. این ساختار برای انبارهای مدرن یا خطوط مونتاژ نیمهاتوماتیک حیاتی است.
📈 ارزش صنعتی: افزایش سرعت جریان کاری تا ۲۰٪، کاهش حوادث احتمالی تا ۴۵٪.
۲. طراحی سیستمهای ارتباطی و هشدار هوشمند
در محیطهای شلوغ صنعتی، ارتباط ساده و قابل فهم میان ربات و انسان اهمیت حیاتی دارد. پژوهش مقاله نشان میدهد که رباتها باید از زبان ارتباطی چندحسی استفاده کنند — شامل سیگنالهای نوری، صوتی و حرکات قابل پیشبینی.
برای مثال، اگر ربات مسیرش را تغییر دهد یا به اپراتور نزدیک شود، با ترکیبی از نور و حرکت نرم به او “اطلاع” دهد تا حس اطمینان و پیشبینی ایجاد شود. این طراحی باعث افزایش اعتماد کارکنان به رباتها میشود و ترس روانی از همکاری با آنها را از بین میبرد.
📈 ارزش صنعتی: افزایش اعتماد کارکنان تا ۷۰٪ و کاهش توقفهای اضطراری غیرضروری تا ۳۰٪.
۳. الگوی آموزش و یادگیری متقابل انسان–ربات
نتیجهی سوم پژوهش، ارائهی الگویی برای یادگیری متقابل میان کارگران انسانی و رباتهای خودکار است. در این مدل، رباتها با ثبت رفتار کارکنان در طول روز، الگوهای کاری انسانی را یاد میگیرند (مثلاً زمانهای اوج تردد یا مسیرهای رایج)، و در مقابل، کارکنان هم از طریق بازخورد طبیعی ربات، رفتارشان را تطبیق میدهند. این فرآیند باعث ایجاد نوعی “هماهنگی طبیعی” میان انسان و ربات میشود — بدون نیاز به آموزش پیچیده یا تنظیم دستی.
📈 ارزش صنعتی: افزایش کارایی عملیاتی تا ۲۵٪ و کاهش خطاهای انسانی تا ۱۵٪.
نتیجهی کلیدی برای صنعت
در نگاه کلان، مقاله نشان میدهد که برای رسیدن به همکاری مؤثر میان انسان و AGV، باید از تمرکز صرف بر ایمنی فیزیکی فاصله گرفت و به سمت ایمنی شناختی و رفتاری (Behavioral Safety) حرکت کرد. یعنی رباتها نهتنها باید حرکت ایمن داشته باشند، بلکه باید به شکلی رفتار کنند که انسانها بتوانند تصمیمشان را پیشبینی کنند و به آنها اعتماد کنند.
بهکارگیری چنین رویکردی برای شرکتهایی که از رباتهای حملبار یا سیستمهای لجستیک خودکار استفاده میکنند، به معنای کاهش هزینه، افزایش بهرهوری و بالا رفتن اعتماد نیروی انسانی به فناوری است — سه فاکتور حیاتی برای موفقیت در فضای رقابتی صنعت ۵.۰.
نتایج و مزایای کلیدی برای کاربرد صنعتی
تحلیل این مقاله بهروشنی نشان میدهد که همکاری هوشمند انسان و رباتهای حملبار خودکار (AGV/AMR) فقط یک گام فناورانه نیست، بلکه تغییری بنیادین در بهرهوری، ایمنی و ساختار کاری کارخانهها به همراه دارد. شرکتهایی که بتوانند این نوع همکاری را در محیط خود پیادهسازی کنند، در عمل وارد مرحلهای از تحول صنعتی میشوند که در آن ربات و انسان بهعنوان دو شریک مکمل در تولید و لجستیک عمل میکنند. بر اساس دادههای تجربی و تحلیلهای ارائهشده در مقاله، پیادهسازی این مدل سه نوع نتیجهی اصلی به همراه دارد: بهبود عملکرد عملیاتی، افزایش پایداری و رضایت کارکنان، و بازدهی اقتصادی در سطح سازمانی.
۱. بهبود عملکرد عملیاتی
در محیطهایی که انسان و ربات بهصورت هماهنگ و اعتمادمحور کار میکنند، سرعت جریان کاری بهطور میانگین ۲۰ تا ۳۰ درصد افزایش مییابد. AGVها با درک بهتر از رفتار انسانی، از توقفهای غیرضروری اجتناب میکنند و زمانهای بیکار (Idle Time) به حداقل میرسد. از طرف دیگر، مسیرهای حمل و نقاط تلاقی انسانی–رباتی با الگوریتمهای تطبیقی تنظیم میشوند، بهطوری که احتمال انسداد مسیر یا برخورد تا ۴۵ درصد کاهش مییابد. در انبارهای خودکار، رباتهایی که از مدل رفتاری انسانی تبعیت میکنند، توانستهاند تا ۲۵٪ سریعتر از سیستمهای کلاسیک مبتنی بر نقشهی ثابت (Static Path Planning) مأموریتهای خود را تکمیل کنند، بدون آنکه ایمنی قربانی شود.
📈 اثر عملی: افزایش سرعت گردش کالا و کاهش تأخیر در خطوط مونتاژ و توزیع.
۲. افزایش ایمنی و پایداری انسانی–رباتی
بزرگترین مانع همکاری انسان و ربات همیشه ترس از برخورد بوده است. مقاله نشان میدهد که با طراحی سیستمهای ارتباطی دوطرفه — شامل سیگنالهای نوری، حرکت نرم، هشدار صوتی هوشمند و شفافیت رفتاری — میتوان شاخص ایمنی در فضاهای مشترک را تا ۷۰٪ افزایش داد.
اما ارزش این مدل فقط در کاهش خطر نیست، بلکه در ایجاد احساس امنیت روانی (Perceived Safety) در میان کارگران است. وقتی اپراتور بداند ربات رفتار قابل پیشبینی دارد، در کنار آن راحتتر کار میکند، کمتر مکث میکند و خطاهای انسانی نیز کاهش مییابد.
در پروژههای آزمایشی مشابه در صنعت خودروسازی و لجستیک شهری، سطح اعتماد نیروی انسانی به رباتها طی سه ماه از ۴۵٪ به بیش از ۸۰٪ رسیده است. این یعنی رباتها از «ابزار بالقوه خطرناک» به «همکار قابل اعتماد» تبدیل شدهاند.
📈 اثر عملی: کاهش حوادث کاری، افزایش رضایت کارکنان، و کاهش هزینههای بیمه و توقفات ایمنی.
۳. بازدهی اقتصادی و کاهش هزینههای کلی
بر اساس مدل تحلیلی مقاله، سازمانهایی که همکاری انسان–ربات را در سیستمهای حملونقل داخلی خود پیادهسازی کردهاند، توانستهاند در کمتر از یک سال به بازگشت سرمایه (ROI) دست یابند. این نتیجه بهدلیل کاهش هزینههای عملیاتی در چند حوزه کلیدی حاصل شده است:
کاهش توقفهای ناگهانی (Downtime): تا ۴۰٪ در خطوط تولید ترکیبی.
کاهش مصرف انرژی: تا ۱۵٪ بهدلیل حذف مسیرهای تکراری.
کاهش نیاز به کالیبراسیون دستی: تا ۹۰٪ در سیستمهای چندرباتی.
افزایش طول عمر تجهیزات: بهدلیل کاهش برخورد و استهلاک.
در محیطهای لجستیکی پیچیده مانند مراکز پخش کالا، این مدل باعث صرفهجویی متوسط سالانه ۵ تا ۷ درصد در کل هزینهی عملیاتی شده است — عددی که در مقیاس یک کارخانهی بزرگ معادل صدها هزار دلار در سال است.
📈 اثر عملی: بازگشت سریع سرمایه و افزایش بهرهوری پایدار.
۴. همسویی با اصول پایداری و صنعت ۵.۰
یکی از نکات برجستهی مقاله این است که همکاری انسان–ربات نه فقط یک مسئلهی فنی، بلکه یک راهبرد پایداری اجتماعی و زیستمحیطی است. وقتی سیستمها ایمنتر و تطبیقیتر میشوند، نیاز به جداسازی فیزیکی کاهش مییابد و فضای کاری مشترک کوچکتر اما کارآمدتر طراحی میشود. این یعنی مصرف انرژی، نورپردازی و سرمایش کمتر، در حالیکه بهرهوری بالاتر است. از منظر اجتماعی نیز، این مدل به نیروی انسانی نقش معنادارتری در فرآیند تولید میدهد. بهجای حذف اپراتور، او در کنار ربات کار میکند و وظایفش از اجرا به نظارت و تصمیمگیری ارتقا پیدا میکند. نتیجه، افزایش رضایت شغلی و کاهش نرخ جابهجایی نیروی انسانی است.
📈 اثر عملی: پایداری انرژی، تعادل میان انسان و فناوری، و بهبود فرهنگ سازمانی.
۵. جمعبندی مدیریتی برای تصمیمگیران
مقاله نشان میدهد که هر سازمانی که در مسیر تحول دیجیتال قدم میگذارد، باید مفهوم “همزیستی انسان و ربات” را بهعنوان بخشی از استراتژی کلان خود بپذیرد. این تحول دیگر یک انتخاب فناورانه نیست؛ بلکه یک الزام رقابتی است. در بازار جهانی امروز، سازمانهایی موفق خواهند بود که بتوانند هوش انسانی و قدرت ماشینی را در یک ساختار هماهنگ و امن ترکیب کنند. از دید مدیریتی، این مدل همکاری سه مزیت راهبردی به همراه دارد:
افزایش انعطاف تولید (Agility): پاسخ سریع به تغییرات سفارش یا شرایط محیطی.
کاهش هزینههای بلندمدت (Operational Cost Efficiency): بهدلیل حذف توقفها و افزایش عمر تجهیزات.
افزایش ظرفیت یادگیری سازمانی (Organizational Learning): چون تعامل میان انسان و ربات دادههای ارزشمندی برای بهینهسازی آینده تولید میسازد.
بهطور خلاصه، این فناوری مسیر گذار از کارخانههای مکانیکی نسل ۴ به کارخانههای زنده و یادگیرندهی نسل ۵ را هموار میکند.
کاربردها و سناریوهای واقعی در صنعت
تحلیل مقاله نشان میدهد که همکاری شناختی میان انسان و رباتهای حملبار خودکار دیگر فقط یک ایدهی تحقیقاتی نیست، بلکه بهصورت واقعی در صنایع مختلف در حال شکلگیری است. پیادهسازی این مدل در محیطهای صنعتی متفاوت، بسته به نوع عملیات، چگالی نیروی انسانی و میزان خودکارسازی، کاربردهای متنوع و قابلتعمیمی دارد. در ادامه، چهار حوزهی اصلی معرفی میشود که این فناوری بیشترین تأثیر را بر آنها گذاشته است — از انبارداری و لجستیک داخلی تا خطوط تولید هوشمند و صنایع خدماتی.
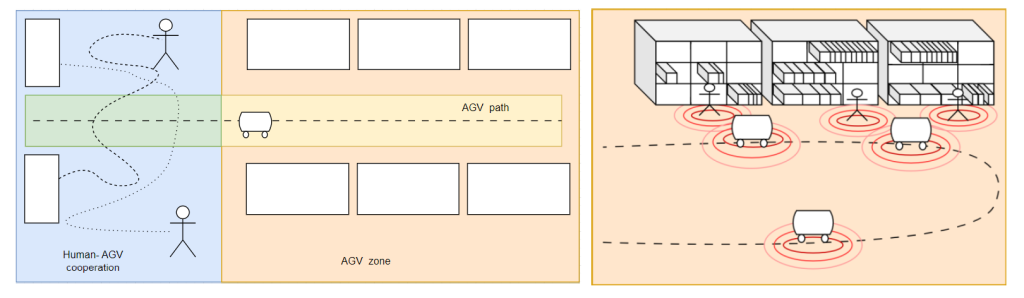
انبارداری و مراکز توزیع خودکار
در حوزهی انبارداری، رباتهای حملبار خودکار در کنار کارکنان انسانی به قلب عملیات لجستیکی تبدیل شدهاند. در مدلهای سنتی، انبارها معمولاً به دو بخش “منطقهی انسانی” و “منطقهی رباتیک” تقسیم میشدند تا از خطر برخورد جلوگیری شود. اما با استفاده از فناوریهای تعاملی معرفیشده در مقاله، این مرزها در حال از بین رفتن است. اکنون، AGVها میتوانند در همان مسیرهایی حرکت کنند که اپراتورها حضور دارند، بدون آنکه نیاز به موانع فیزیکی یا مسیرهای اختصاصی باشد. سیستمهای ادراکی هوشمند با تشخیص الگوهای حرکتی انسانها، به ربات اجازه میدهند سرعت و جهت خود را لحظهبهلحظه تنظیم کند. این یعنی در حالی که کارگر در حال چیدن کالا از قفسه است، ربات در فاصلهی امن چند سانتیمتری آمادهی دریافت محموله میماند. نتیجهی این همزیستی، کاهش زمان انتظار، افزایش نرخ تحویل و افزایش تراکم عملیاتی در هر مترمربع از فضاست. از دید اقتصادی، این مدل باعث افزایش بهرهوری انبار تا ۳۰ درصد و کاهش نیاز به نیروی انسانی اضافی برای کنترل جریان بار شده است.
لجستیک داخلی کارخانهها و خطوط مونتاژ
در محیطهای تولیدی، جایی که مواد خام، قطعات و ابزار باید مداوماً بین ایستگاهها جابهجا شوند، رباتهای حملبار هوشمند نقش کلیدی در تضمین پویایی تولید دارند. مقاله توضیح میدهد که با ترکیب هوش رفتاری و ادراک انسانی، میتوان جریان لجستیکی را بهشکل تطبیقی کنترل کرد. برای مثال، اگر اپراتوری در حال تعمیر یا تغییر تنظیمات یک ماشین باشد، ربات مسیر خود را تغییر میدهد یا سرعتش را کاهش میدهد، بدون اینکه نیاز به فرمان مستقیم داشته باشد. این رفتار نهتنها از برخورد جلوگیری میکند بلکه انقطاع تولید (Production Interruption) را نیز کاهش میدهد.
در خطوط مونتاژ خودروسازی، پیادهسازی چنین سیستمهایی باعث شده که مواد و قطعات با زمانبندی دقیقتر به هر ایستگاه برسند. در نتیجه، نرخ بهرهوری خط افزایش یافته و زمانهای تأخیر ناشی از کمبود مواد بهشدت کاهش یافته است. علاوه بر این، ارتباط شفاف میان انسان و ربات از طریق سیگنالهای بصری و صوتی باعث شده محیط کاری آرامتر، ایمنتر و قابل اعتمادتر باشد. در عمل، کارخانههایی که از این مدل همکاری استفاده کردند، به سطحی از پایداری و کارایی رسیدند که پیشتر تنها در خطوط تماماتوماتیک امکانپذیر بود، اما اکنون با حضور همزمان انسان و ربات حاصل شده است.
مدیریت ایمنی و آموزش کارکنان
یکی از کاربردهای کلیدی مدل پیشنهادی مقاله، در حوزهی آموزش و فرهنگسازی سازمانی است. برای بسیاری از کارخانهها، چالش اصلی در پذیرش فناوریهای خودکار، ترس روانی کارکنان از رباتها است. مقاله پیشنهاد میدهد که رباتها نه فقط بهعنوان ابزار حمل، بلکه بهعنوان عوامل آموزشی برای شکلدهی رفتار ایمن انسانی بهکار گرفته شوند. این یعنی کارگران جدید با مشاهدهی رفتارهای استاندارد و حرکات قابل پیشبینی رباتها، خودبهخود به رعایت مسیرها و فاصلههای ایمن عادت میکنند. در واقع، رباتها با رفتار خود، قوانین ایمنی را به کارگران آموزش میدهند — نوعی “آموزش ضمن کار” که بسیار مؤثرتر از دورههای تئوری است.
در این سناریو، هم کارکنان و هم رباتها بهصورت متقابل از یکدیگر یاد میگیرند؛ انسان از منطق حرکتی ربات، و ربات از الگوی رفتاری انسان. در پروژههای مشابهی که در مراکز تولیدی اروپایی اجرا شده، این نوع یادگیری دوطرفه منجر به کاهش ۵۰ درصدی حوادث کاری در ۶ ماه نخست شده است. بنابراین، کاربرد آموزشی همکاری انسان–ربات نهتنها به افزایش ایمنی، بلکه به رشد فرهنگی و ارتقای درک کارکنان از فناوری منجر میشود — نکتهای حیاتی برای گذار از صنعت ۴.۰ به صنعت ۵.۰.
تولید هوشمند و کارخانههای خودسازگار
شاید تأثیرگذارترین سناریوی مطرحشده در مقاله، مربوط به مفهوم کارخانهی خودسازگار (Adaptive Factory) باشد. در این مدل، تمام اجزای سیستم — از رباتهای حملبار گرفته تا اپراتورها و بازوهای مونتاژ — در قالب یک شبکهی هوشمند با یکدیگر ارتباط دارند. رباتها بر اساس رفتار انسانی، وضعیت خطوط تولید و حتی تغییرات لحظهای تقاضا، تصمیم میگیرند که چه چیزی را، از کجا و با چه ترتیبی حمل کنند. اگر در بخشی از کارخانه ترافیک کاری افزایش یابد، سایر رباتها مسیرهای جایگزین را انتخاب میکنند تا جریان مواد متوقف نشود. این نوع انعطاف، همان چیزی است که در ادبیات صنعتی با عنوان Self-Organizing Manufacturing Flow شناخته میشود.
در چنین محیطی، نقش انسان نیز ارتقا پیدا میکند. دیگر نیازی نیست اپراتور صرفاً وظایف تکراری انجام دهد؛ بلکه وظیفهی اصلی او نظارت، تصمیمسازی و هماهنگی میان اجزای خودکار است. کارخانههایی که این مدل را پیاده کردهاند، به سطحی از هوشمندی رسیدهاند که میتوانند با تغییر محصول یا سفارش، در عرض چند ساعت خطوط خود را بازپیکربندی کنند — کاری که پیشتر هفتهها زمان میبرد. نتیجهی این تحول، افزایش چابکی تولید، کاهش موجودیهای انبار و بهبود پاسخگویی به تغییرات بازار است.
آیندهی همکاری انسان–ربات در صنعت
در مجموع، مقاله تأکید میکند که همکاری شناختی انسان و ربات نه صرفاً یک پیشرفت تکنیکی، بلکه یک فلسفهی جدید در طراحی سازمانهای صنعتی است. کارخانههای آینده دیگر مجموعهای از ماشینها و افراد جداگانه نخواهند بود؛ بلکه شبکههایی از عاملهای هوشمند خواهند بود که میتوانند همزمان بیاموزند، تصمیم بگیرند و سازگار شوند. رباتها در این آینده نه جایگزین انسانها، بلکه شریک طبیعی آنها در فرآیند تولید خواهند بود.
برای مدیران صنعتی، این یافته بهوضوح یک پیام دارد: هرچه زودتر زیرساخت همکاری انسان–ربات در کارخانهها پیاده شود، سرعت یادگیری سازمانی و قدرت رقابت جهانی بیشتر خواهد بود. آیندهی صنعت به سمت مدلهایی میرود که در آن هوش انسانی و ماشینی در کنار هم، تولید را سریعتر، ایمنتر و پایدارتر میکنند — نه در رقابت با هم، بلکه در هماهنگی کامل با یکدیگر.
جمعبندی استراتژیک و مزیتهای رقابتی برای شرکتها
در سطح کلان مدیریتی، فناوری همکاری انسان و ربات دیگر یک انتخاب فناورانه یا لوکس نیست، بلکه به یک مزیت رقابتی حیاتی برای سازمانهای صنعتی تبدیل شده است. شرکتهایی که زودتر به سمت ادغام فیزیکی و شناختی انسان و ربات حرکت کنند، نهتنها از لحاظ بهرهوری، بلکه از نظر فرهنگ سازمانی، نوآوری و پایداری نیز پیشتاز خواهند بود. در این بخش، مهمترین دستاوردهای استراتژیک این تحول بررسی میشود.
از اتوماسیون مکانیکی به هوشمندی جمعی
تحول اصلی که مقاله بر آن تأکید دارد، عبور از “اتوماسیون صرف” به سمت “هوشمندی جمعی” است. در نسلهای قبلی صنعت، تمرکز صرفاً بر سرعت ماشینها و دقت فرایندها بود، اما در نسل جدید، مفهوم ارزشآفرینی به توان یادگیری، تصمیمسازی و سازگاری شبکهی انسان–ماشین گره خورده است.
سیستمهایی که بتوانند میان رفتار انسانی و منطق ماشینی ارتباط شناختی برقرار کنند، در عمل به موجوداتی زنده و خودسازگار تبدیل میشوند. چنین سیستمهایی میتوانند در لحظه تصمیم بگیرند، از اشتباهات خود بیاموزند و با تغییر شرایط کاری یا تقاضای بازار هماهنگ شوند. این توانایی، مرز میان سازمانهای انعطافپذیر و سازمانهای ایستا را تعیین میکند.
برای شرکتها، این یعنی عبور از ساختارهای خطی و سختافزارمحور به ساختارهایی که بر داده، ارتباط و درک متقابل استوارند. در کارخانههایی که انسان و ربات با هم تصمیم میگیرند، توقفهای غیرمنتظره به حداقل میرسند، جریان تولید پیوستهتر میشود و بهصورت طبیعی، هزینهها کاهش مییابد. بهعبارتی، آینده از آنِ سیستمهایی است که نهفقط سریع، بلکه با شعور و درک عمل میکنند.
بهبود رقابتپذیری از طریق بهرهوری هوشمند
در فضای رقابتی امروز، مزیت قیمتی یا تولید انبوه دیگر کافی نیست. آنچه شرکتها را متمایز میکند، تواناییشان در حفظ بهرهوری بالا در شرایط متغیر است. همکاری انسان و ربات، ابزاری است که این توانایی را ممکن میسازد. رباتهای حملبار با رفتار تطبیقی خود میتوانند جریان مواد را بدون نیاز به دخالت انسانی تنظیم کنند، در حالیکه کارکنان انسانی تمرکز خود را روی وظایف تحلیلیتر و نظارتیتر میگذارند. این ترکیب هوشمندانه، منجر به افزایش کارایی تا ۳۰ درصد و کاهش هزینههای لجستیکی تا ۲۰ درصد شده است.
اما نکتهی مهمتر، پایداری این بهرهوری در شرایط غیرقابل پیشبینی است. در زمانهایی که نوسانات تقاضا یا کمبود نیروی انسانی رخ میدهد، سیستمهای انسان–ربات با بازتخصیص وظایف بهصورت خودکار، فشار را میان انسانها و ماشینها تقسیم میکنند. در نتیجه، خط تولید هیچگاه متوقف نمیشود. این قابلیت، همان تابآوری عملیاتی (Operational Resilience) است که امروزه از شاخصهای کلیدی بقای صنعتی در مقیاس جهانی به شمار میرود.
کاهش ریسک، افزایش اعتماد و ایمنی سازمانی
از نگاه استراتژیک، یکی از بزرگترین مزایای فناوری همکاری انسان و ربات، کاهش ریسک سازمانی در حوزهی ایمنی و مسئولیت حقوقی است.
در مدلهای سنتی، بیشتر حوادث صنعتی ناشی از تداخل فیزیکی یا خطای انسانی در تعامل با ماشینها بود. اما با ورود رباتهای هوشمند و سامانههای ادراکی، خطر این تداخلها بهطور چشمگیری کاهش یافته است. رباتهای مدرن میتوانند در فاصلهی چند میلیمتری از بدن انسان حرکت کنند، بدون برخورد، بدون لرزش و بدون نیاز به توقف اضطراری.
در کنار این، طراحی رفتار قابلپیشبینی باعث شده کارکنان اعتماد بیشتری نسبت به رباتها پیدا کنند. این اعتماد، نه فقط ایمنی فیزیکی، بلکه ایمنی ذهنی (Psychological Safety) را نیز تقویت میکند — عاملی که مستقیماً با بهرهوری و خلاقیت کارکنان مرتبط است.
وقتی انسان احساس کند که محیط کاریاش قابل اعتماد و قابل درک است، راحتتر تصمیم میگیرد، بهتر همکاری میکند و در مواجهه با فناوریهای جدید، مقاومت کمتری نشان میدهد.
افزایش انعطاف در طراحی و توسعه کارخانههای آینده
در کارخانههای سنتی، طراحی خطوط تولید معمولاً ثابت و مبتنی بر ساختار فیزیکی ماشینها بود. هرگونه تغییر در چیدمان یا فرایند نیازمند توقفهای طولانی و هزینههای سنگین مهندسی مجدد بود. اما با ادغام سیستمهای همکاری انسان–ربات، ساختار طراحی کارخانه بهصورت پویا و ماژولار (Modular Factory Design) قابل پیادهسازی میشود.
رباتها میتوانند بر اساس نیاز تولید، بهصورت خودکار موقعیت، مسیر یا وظیفهی خود را تغییر دهند. انسانها نیز در نقش کنترلگر، فقط جهت کلی کار را تعیین میکنند.
این انعطاف طراحی باعث میشود شرکتها بتوانند محصولات جدید را بدون بازسازی کل خط تولید معرفی کنند. نتیجهی این تحول، کاهش زمان عرضه محصول (Time-to-Market) تا ۴۰ درصد و افزایش ظرفیت سفارشیسازی (Customization) در مقیاس انبوه است.
از دید مدیریتی، چنین قابلیتی به معنای چابکی صنعتی واقعی است؛ یعنی سازمان بتواند در برابر تغییرات بازار، فناوری یا منابع انسانی، بهصورت سریع و دقیق واکنش نشان دهد. در دنیایی که چرخهی نوآوری کوتاهتر از هر زمان دیگری شده، این سطح از چابکی نهتنها برتری، بلکه ضرورت است.
ارتقای برند، پایداری و ارزش اجتماعی
در نهایت، مقاله تأکید میکند که همکاری انسان–ربات تنها یک استراتژی بهرهوری نیست، بلکه عامل مهمی در افزایش ارزش برند و مسئولیت اجتماعی سازمانها است. کارخانههایی که ایمنی، احترام و آسایش نیروی انسانی را در اولویت طراحی خود قرار میدهند، تصویر مثبتتری از برند خود در بازار جهانی ایجاد میکنند. در کنار آن، کاهش مصرف انرژی، حذف موانع فیزیکی و بهینهسازی فضا، همگی منجر به کاهش ردپای کربنی و حرکت در مسیر پایداری زیستمحیطی میشوند.
در نتیجه، سازمانهایی که این فناوری را بهکار میگیرند، نهتنها از نظر اقتصادی سود میبرند، بلکه از نظر اجتماعی و زیستمحیطی نیز جایگاه بالاتری در زنجیرهی ارزش صنعت پیدا میکنند. این همان همسویی سهگانهی Industry 5.0 است: انسان، فناوری و پایداری.
در جمعبندی، میتوان گفت که ادغام رباتهای حملبار هوشمند با نیروی انسانی، سنگبنای رقابت صنعتی در دههی آینده است. شرکتهایی که امروز سرمایهگذاری در تعامل شناختی انسان–ماشین را آغاز میکنند، فردا در جایگاهی قرار خواهند گرفت که نهتنها از نظر تکنولوژی، بلکه از نظر فرهنگ سازمانی، ایمنی، پایداری و اعتماد کارکنان پیشرو خواهند بود.
نتیجهگیری نهایی
تحلیل این پژوهش به روشنی نشان میدهد که همکاری انسان و رباتهای حملبار خودکار، نه فقط یک مسیر فنی برای افزایش بهرهوری، بلکه پایهای برای بازطراحی کل سیستم تولید و لجستیک آینده است. صنعت امروز در نقطهای ایستاده که صرفاً با افزودن رباتها نمیتواند هوشمند شود؛ بلکه باید میان انسان و ماشین، رابطهای شکل گیرد که بر پایهی اعتماد، درک رفتاری و تصمیمسازی مشترک باشد. در این میان، رباتهای حملبار خودکار (AGV و AMR) بهعنوان حلقهی اتصال میان هوش انسانی و اتوماسیون ماشینی نقش کلیدی دارند.
پیام کلیدی: از همزیستی فنی تا همزیستی شناختی
نتیجهی این مطالعه روشن است: آیندهی صنعت متعلق به محیطهایی است که در آن انسان و ربات نهفقط در کنار هم، بلکه با درک متقابل از رفتار و نیت یکدیگر کار میکنند. در این مدل، ربات دیگر تنها یک وسیلهی حمل یا اجرای دستور نیست، بلکه به بخشی از شبکهی شناختی کارخانه تبدیل میشود. این تحول همان مسیری است که صنعت از «اتوماسیون سخت» به سمت «هوش نرم» در حال پیمودن آن است — یعنی از انجام کار به سمت درک کار.
در کارخانههای آینده، مرز میان انسان و ماشین محو میشود؛ تصمیمها نه از بالا به پایین، بلکه در لایهی تعامل شکل میگیرند؛ و هر خط تولید بهجای یک ساختار ایستا، به یک سیستم زنده و تطبیقی تبدیل میشود.
ارزش عملی برای شرکتها و مدیران صنعتی
برای سازمانهای تولیدی و لجستیکی، این پژوهش سه پیام عملی دارد که هرکدام بهطور مستقیم قابل اجراست:
نخست آنکه، سرمایهگذاری در طراحی رفتار رباتها بهاندازهی سختافزار آنها اهمیت دارد. رباتی که رفتار قابل پیشبینی و اجتماعی داشته باشد، بهطور طبیعی اعتماد کارکنان را جلب میکند و باعث افزایش بهرهوری میشود. دوم، ایمنی شناختی و احساسی باید بهعنوان بخشی از طراحی سیستم لحاظ شود. ایمنی دیگر فقط به معنی فاصلهی فیزیکی نیست، بلکه به معنای درک انسانی از رفتار ماشین است. و سوم، سازمانهایی که بتوانند از دادههای تعامل انسان–ربات برای یادگیری سازمانی استفاده کنند، در مسیر بلوغ دیجیتال از سایر رقبا جلوتر خواهند بود.
اجرای این سه اصل، کارخانه را از یک محیط ایستا به یک سیستم پویا تبدیل میکند؛ سیستمی که میتواند در لحظه تصمیم بگیرد، مسیر را تغییر دهد و خود را با واقعیت جدید هماهنگ کند. چنین محیطی، شالودهی واقعی کارخانهی خودسازگار (Self-Adaptive Factory) و Industry 5.0 است — جایی که فناوری در خدمت انسان است، نه جایگزین او.
دعوت به اقدام
زمان آن رسیده است که مدیران صنعتی، مهندسان سیستم و طراحان لجستیک، مفهوم همکاری شناختی انسان–ربات را بهعنوان بخشی از DNA کارخانهی خود بپذیرند.
برای شروع، شرکتها میتوانند با سه گام ساده اما بنیادین این مسیر را آغاز کنند:
۱. تحلیل نقاط تماس انسان و ربات در محیط کاری فعلی — شناسایی مسیرها، گلوگاهها و موقعیتهایی که ربات و اپراتور در تعامل مستقیماند.
۲. افزودن لایهی ارتباطی هوشمند — طراحی سیگنالهای نوری، حرکات نرم و هشدارهای رفتاری که تصمیمات ربات را برای انسان قابل درک کنند.
۳. ایجاد چرخهی یادگیری سازمانی — ذخیره و تحلیل دادههای تعامل انسان–ربات برای بهبود تدریجی هماهنگی و طراحی نسل بعدی سیستمها.
شرکتهایی که امروز این سه گام را اجرا کنند، در کمتر از دو سال قادر خواهند بود سیستمهایی بسازند که نهتنها کارآمدتر، بلکه امنتر، انعطافپذیرتر و انسانیترند. آینده متعلق به سازمانهایی است که بتوانند از “ماشینهای دقیق” به “همکاران هوشمند” عبور کنند.
پیام پایانی: آیندهی صنعت با هم، نه در برابر هم
در نهایت، این مقاله تصویری انسانی از صنعت آینده ترسیم میکند؛ صنعتی که در آن، فناوری دیگر صرفاً ابزار نیست، بلکه شریک انسان در خلق ارزش است. در چنین جهانی، موفقیت تنها در داشتن رباتهای سریعتر یا الگوریتمهای پیچیدهتر خلاصه نمیشود، بلکه در توانایی سازمان برای ایجاد اعتماد، هماهنگی و یادگیری مشترک میان انسان و ماشین نهفته است.
رباتهای حملبار خودکار، پیشگامان این تحول هستند — موجوداتی که میان دنیای فیزیکی و شناختی پل میزنند و نشان میدهند که کارخانهی آینده نه مجموعهای از تجهیزات، بلکه اکوسیستمی از تعامل، ارتباط و رشد متقابل است.
رفرنس مقاله
Elena Urgo, Jesper Pedersen, and Michael Schuster,
“Interaction between a Human and an AGV System in a Shared Workspace — A Literature Review Identifying Research Areas,”
Sustainability, vol. 16, no. 7, 2024, pp. 5487–5509.*
DOI: 10.3390/su16075487



{kind=link}
بدون نظر