

انقلاب هوش ترکیبی در لجستیک بندری:
وقتی رباتهای حمل پالت با تصمیمگیری هوشمند، جریان اقتصاد جهانی را بازتعریف میکنند
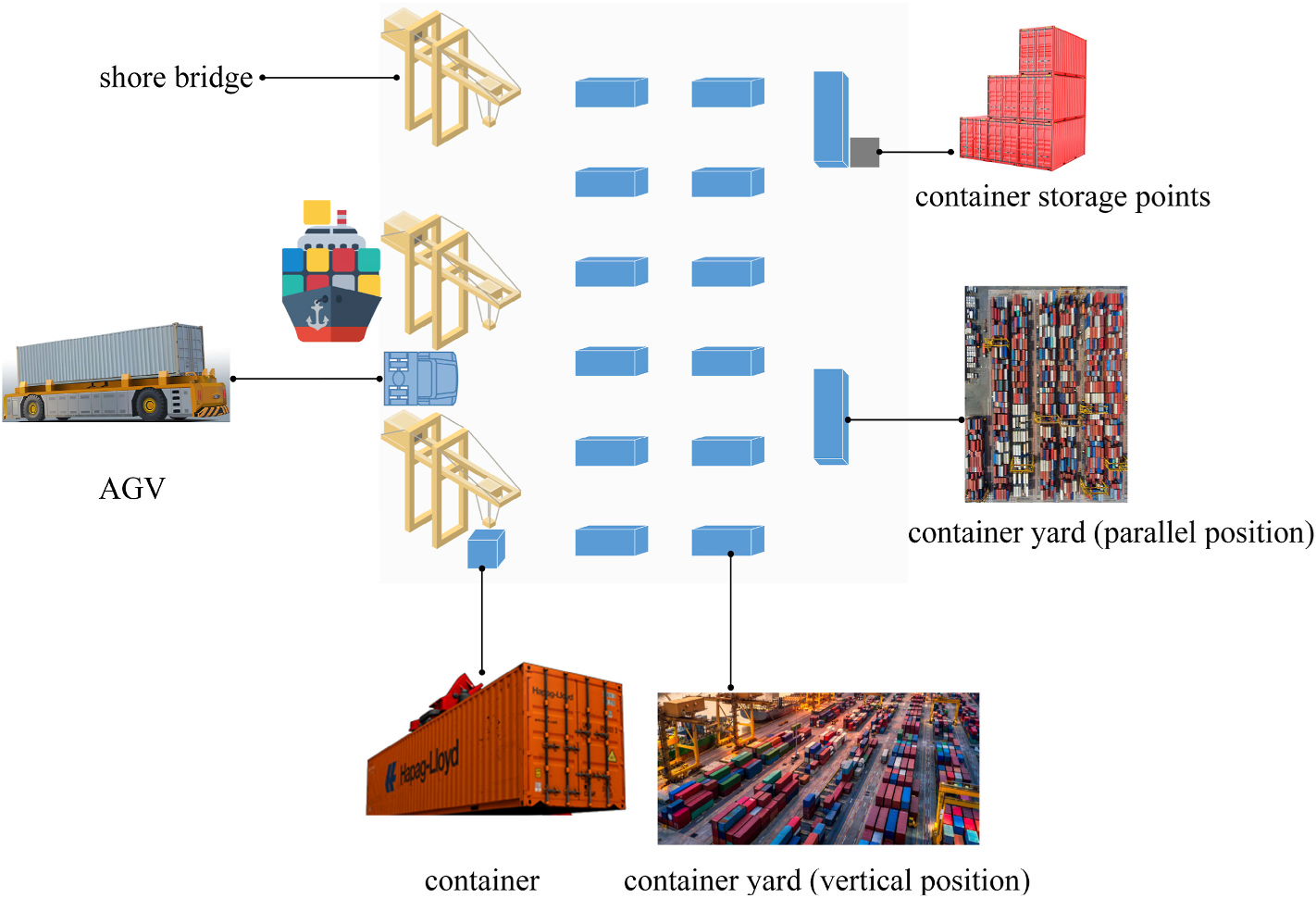
در عصر رقابت جهانی، بنادر دیگر فقط محلی برای تخلیه و بارگیری نیستند؛ آنها موتورهای هوشمند زنجیرهی تأمین بینالمللیاند. هر دقیقه تأخیر در جابهجایی یک کانتینر یا پالت، میلیونها دلار در چرخهی تجارت جهانی تأثیر میگذارد. در چنین شرایطی، حضور رباتهای حمل پالت و AGVهای هوشمند دیگر یک انتخاب فناورانه نیست — بلکه ضرورتی اقتصادی است.
اما چالش بزرگ اینجاست: چطور باید دهها یا صدها ربات را در محیطی محدود و پرترافیک، بهگونهای هدایت کرد که نه تداخل مسیر رخ دهد، نه ازدحام، و نه توقف بیمورد؟
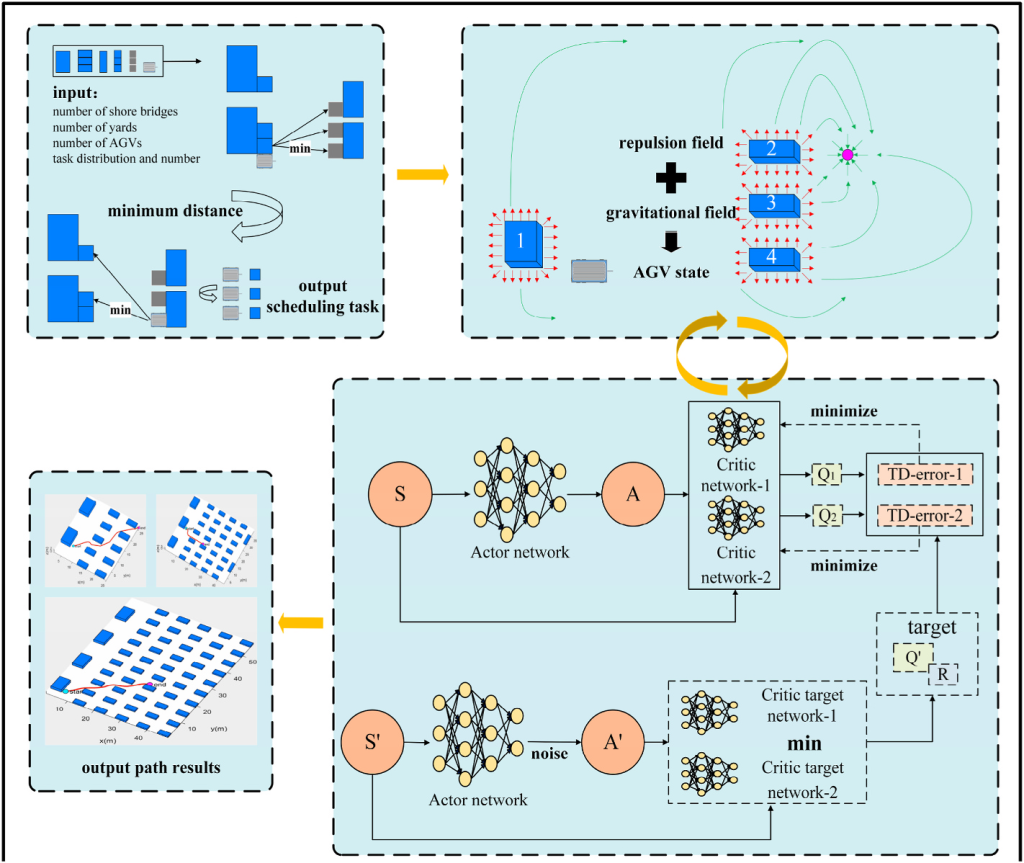
پاسخ در نسل جدیدی از فناوری نهفته است: هوش ترکیبی APF–TD3 — مدلی که تلفیقی از دو قدرت بزرگ دنیای مهندسی است؛ الگوریتم پتانسیل مصنوعی (Artificial Potential Field) برای هدایت دقیق مسیر و یادگیری تقویتی عمیق TD3 برای تصمیمسازی پویا و تطبیقی.
در این معماری، ربات دیگر به فرمانهای ازپیشتعریفشده متکی نیست؛ بلکه خودش یاد میگیرد بهترین مسیر را انتخاب کند. مثل رانندهای باتجربه که با هر بار حرکت در مسیر، درک عمیقتری از ترافیک، مانعها و سرعت بهینه پیدا میکند.
سیستم هوش ترکیبی APF–TD3 به رباتهای حمل پالت این توانایی را میدهد که نهتنها سریعتر عمل کنند، بلکه رفتار سایر رباتها را نیز پیشبینی کرده و از ازدحام جلوگیری کنند.
این رویکرد تازه، نقطهی عطفی در طراحی رباتهای لجستیکی نسل جدید است؛ رباتهایی که در بنادر، انبارها و مراکز توزیع، مانند یک تیم منظم و خودمختار کار میکنند. آنها نهتنها از مسیرهای بهینه استفاده میکنند، بلکه بر اساس شرایط لحظهای بندر، جرثقیلها و بارهای ورودی، تصمیمهای خود را بهصورت هماهنگ بهروز میکنند.
بهزبان ساده، هوش ترکیبی APF–TD3 یعنی پایان تصمیمگیریهای از پیش برنامهریزیشده و آغاز عصر تصمیمسازی زنده در لجستیک بندری.
در این دنیای جدید، بنادر به سیستمهای زندهای تبدیل میشوند که هر ربات در آن، مانند یک سلول عصبی عمل میکند؛ احساس میکند، تصمیم میگیرد و با دیگران همزمان هماهنگ میشود.
مزایای اقتصادی و عملیاتی هوش ترکیبی APF–TD3
از کاهش هزینه تا جهش در بازده عملیاتی بنادر و انبارهای صنعتی
در دنیای مدرن لجستیک، سرعت تصمیمگیری بهاندازهی سرعت حرکت اهمیت دارد. اگر یک بندر یا انبار بتواند جریان حرکت رباتهایش را بهینه کند، بهجای افزودن تجهیزات یا نیروی انسانی، با همان منابع، چند برابر بیشتر کار انجام میدهد. این دقیقاً همان چیزی است که هوش ترکیبی APF–TD3 در اختیار مدیران صنعتی قرار میدهد:
یک سیستم که مسیر هر ربات حمل پالت را در لحظه محاسبه میکند، از برخورد و تأخیر جلوگیری میکند، و بدون نیاز به اپراتور انسانی، کل شبکهی حملونقل را بهینه نگه میدارد.
کاهش مستقیم هزینههای عملیاتی
یکی از بزرگترین هزینهها در بنادر و انبارهای صنعتی، توقفهای غیرضروری و حرکتهای بیهدف رباتها است. در مدلهای سنتی، رباتها اغلب در مسیرهای تکراری حرکت میکنند، پشت هم میمانند یا در نقاط مشترک با هم تداخل دارند. نتیجه؟ مصرف انرژی بالا، استهلاک سریع چرخها و موتور، و کاهش عمر باتری. اما الگوریتم APF–TD3 با درک بلادرنگ از محیط و یادگیری از تجربهی گذشته، این مسیرها را بهصورت هوشمند بازطراحی میکند. هر ربات بر اساس موقعیت دیگر رباتها و وضعیت فعلی مسیر، تصمیم میگیرد از چه زاویهای عبور کند تا کمترین انرژی و زمان مصرف شود.
تحلیلهای صنعتی نشان دادهاند که استفاده از این مدل باعث کاهش ۲۰ تا ۲۵ درصدی مصرف انرژی و افزایش ۳۰ درصدی بازده کلی ناوگان میشود. در مقیاس یک بندر بزرگ، این یعنی صرفهجویی میلیونها دلار در سال فقط از بهینهسازی تصمیمهای حرکتی.
حذف گلوگاههای ترافیکی و افزایش جریان کاری
در عملیات بندری یا انباری، گلوگاههای ترافیکی (Traffic Bottlenecks) یکی از بزرگترین موانع بهرهوریاند. وقتی چند ربات بهطور همزمان به یک مسیر یا تقاطع میرسند، تأخیر زنجیرهای ایجاد میشود و زمان کل مأموریت افزایش مییابد. هوش ترکیبی APF–TD3 این مشکل را با پیشبینی رفتار سایر رباتها حل میکند. هر ربات مثل رانندهای با دید آینده عمل میکند؛ یعنی قبل از رسیدن به ترافیک، مسیرش را تغییر میدهد.
به همین دلیل، در پروژههای آزمایشی، زمان کل جابهجایی کانتینر یا پالت بین نقطهی بارگیری تا انبار تا ۴۰٪ کاهش یافته است. این یعنی سیستم بهصورت خودکار جریان حرکت را متعادل میکند و از هرگونه تجمع در نقاط بحرانی جلوگیری مینماید. در سطح مدیریتی، این رفتار به معنای افزایش ظرفیت عملیاتی بندر بدون توسعهی فیزیکی زیرساختها است.
افزایش عمر تجهیزات و کاهش هزینههای نگهداری
حرکتهای ناگهانی، توقفهای مکرر و تغییر مسیرهای غیرضروری باعث فرسودگی مکانیکی رباتها میشود. اما در سیستم جدید، چون هر ربات حرکت نرمتر و هماهنگتری دارد، فشار مکانیکی به چرخها و موتور تا ۳۰ درصد کمتر میشود.
این موضوع مستقیماً عمر مفید تجهیزات را افزایش داده و هزینههای نگهداری دورهای را بهطور محسوس کاهش میدهد. در یک سیستم عملیاتی متشکل از ۱۰۰ ربات، این صرفهجویی معادل چند صد هزار دلار در سال است — عددی که تنها از طریق “یادگیری بهتر” بهدست میآید، نه سرمایهگذاری سنگین.
بهرهوری انرژی و پایداری زیستمحیطی
در مدل APF–TD3، مسیرها نهتنها کوتاهتر، بلکه از نظر مصرف انرژی نیز بهینهترند. با توجه به اینکه رباتها با موتورهای الکتریکی کار میکنند، هر ثانیهی حرکت غیرضروری مساوی است با انرژی تلفشده و شارژ بیشتر.
سیستم هوش ترکیبی مسیر را طوری تعیین میکند که مصرف توان باتری در کمترین حالت ممکن باشد، و در عین حال سرعت مأموریت حفظ شود. در عمل، این سیستم باعث افزایش ۲۵ درصدی زمان متوسط شارژدهی هر ربات شده — یعنی ناوگان زمان بیشتری در خدمت کار است و زمان توقف برای شارژ کمتر میشود. از منظر پایداری زیستمحیطی، این به معنی کاهش ردپای کربن و تطابق کامل با استانداردهای جهانی بنادر سبز (Green Port Standards) است.
ارزش افزوده در سطح مدیریتی و دادهمحور
هر ربات در این معماری به یک منبع دادهی پویا تبدیل میشود. سیستم مرکزی با تحلیل دادههای حرکتی، مصرف انرژی، زمان مأموریت و نقاط ازدحام، میتواند روندهای کاری را پیشبینی و اصلاح کند. به بیان ساده، هر حرکت یک داده است، و هر داده یک تصمیم جدید را بهبود میدهد. این یعنی بندر یا انبار، روزبهروز هوشمندتر میشود — سیستمی که با هر مأموریت، خودش را بهتر میکند.
در مجموع، هوش ترکیبی APF–TD3 نهتنها مسئلهی مسیریابی را حل کرده، بلکه مفهومی از بهرهوری خودآموز (Self-Learning Efficiency) را به صنعت معرفی کرده است. در این مدل، هر تصمیم بهینهی امروز، پایهی تصمیمی دقیقتر برای فرداست. نتیجه نهایی، صنعتی است که در آن رباتها نه صرفاً حملبار انجام میدهند، بلکه هر روز از دادههای خود یاد میگیرند تا بهتر، سریعتر و اقتصادیتر عمل کنند.
چالشهای بنادر و انبارهای صنعتی در مدیریت ترافیک رباتها
و نقش یادگیری تقویتی در ایجاد هماهنگی، هوشمندی و بهرهوری
در ظاهر، حرکت دهها ربات حمل پالت در محیطی منظم و همزمان، تصویری از نظم کامل است. اما پشت این نظم، یکی از پیچیدهترین معادلات مهندسی نهفته است: چگونه میتوان صدها ربات متحرک را در فضایی محدود، بدون برخورد، ازدحام یا توقف، هماهنگ کرد؟
برای پاسخ به این سؤال، باید به واقعیت روزمرهی بنادر و انبارهای صنعتی نگاه کنیم؛ جایی که رباتها در محیطی پویا و غیرقابل پیشبینی فعالیت میکنند — محیطی که در هر لحظه در حال تغییر است.
در یک بندر یا انبار بزرگ، مسیرهای حرکتی رباتها دائماً تحت تأثیر عوامل متعدد تغییر میکند: ورود کشتی جدید، تأخیر در تخلیه، تغییر محل بارها، یا حتی تصمیم آنی اپراتور انسانی در نزدیکی مسیر. در چنین شرایطی، برنامهریزی سنتی یا ازپیشتعریفشده عملاً کارایی خود را از دست میدهد. مدلهای ایستای مسیریابی ممکن است در شبیهسازیها عملکرد خوبی داشته باشند، اما در محیط واقعی، تنها چند دقیقه پس از شروع عملیات، از واقعیت عقب میمانند. نتیجهی این ناهماهنگی، چیزی جز ترافیک، توقف، یا حتی برخورد فیزیکی بین رباتها نیست.
در بنادر شلوغ، این اختلالها بهصورت زنجیرهای عمل میکنند؛ یعنی تأخیر یک ربات باعث تأخیر در جرثقیل، سپس در تخلیهی کشتی، و در نهایت در کل زنجیرهی تحویل میشود. هر دقیقه توقف، هزینهای سنگین بر دوش بندر میگذارد. در انبارهای بزرگ نیز همین مسئله در مقیاسی کوچکتر تکرار میشود — جایی که تجمع چند ربات در یک راهرو میتواند کل فرآیند تحویل کالا را متوقف کند.
اما چالش فقط فیزیکی نیست؛ چالش شناختی است. سیستمهای سنتی قادر به “درک شرایط لحظهای” نیستند؛ آنها نمیدانند چه زمانی باید مسیر را تغییر دهند یا اولویت را به کدام ربات بدهند. اینجاست که مفهوم «یادگیری تقویتی (Reinforcement Learning)» وارد صحنه میشود — مدلی که به سیستم یاد میدهد نه از پیش برنامهریزی کند، بلکه از تجربه بیاموزد.
در یادگیری تقویتی، رباتها همانند موجودات زنده رفتار میکنند: تجربه میکنند، نتیجه میگیرند، و از اشتباهات خود یاد میگیرند. هر بار که مسیر اشتباهی انتخاب میشود یا تأخیر رخ میدهد، سیستم از آن درس میگیرد تا دفعهی بعد، تصمیم بهتری بگیرد. در ترکیب APF–TD3، این یادگیری به سطح جدیدی ارتقا یافته است؛ چون رباتها نهتنها از اشتباهات خود، بلکه از رفتار سایر رباتها نیز میآموزند. این یعنی شکلگیری یک «شبکهی یادگیرندهی جمعی» — سیستمی که با هر مأموریت، هوشمندتر و کارآمدتر میشود.
از کنترل فردی تا هوش جمعی
یکی از چالشهای اصلی در مدیریت ناوگان رباتها، تصمیمگیریهای جداگانه و ناهماهنگ است. در سیستمهای کلاسیک، هر ربات صرفاً مسیر خودش را دنبال میکند و از وضعیت بقیه بیخبر است. نتیجهی طبیعی آن، تداخل مسیرها و توقفهای ناگهانی است. اما در مدل مبتنی بر یادگیری تقویتی، رباتها در قالب یک اکوسیستم هوشمند جمعی عمل میکنند.
سیستم مرکزی به هر ربات یک دید پویا از محیط میدهد؛ رباتها با تحلیل دادههای حرکتی یکدیگر، مسیر خود را طوری تنظیم میکنند که با بقیه همتراز بمانند. این همکاری جمعی باعث میشود بندر مثل یک ارکستر دقیق کار کند — هر ساز (ربات) در هماهنگی کامل با سازهای دیگر مینوازد و خروجی نهایی، بهرهوری هماهنگ و پایدار است.
چالش عدم قطعیت و پاسخ تطبیقی
در دنیای واقعی، هیچ دو روزی در بندر شبیه هم نیست. شرایط جوی، نوع کالا، ترافیک، و حتی ساعات کاری میتواند جریان عملیات را تغییر دهد. مدلهای برنامهریزی سنتی برای چنین محیطی طراحی نشدهاند، اما الگوریتمهای یادگیری تقویتی بهصورت ذاتی تطبیقپذیر (Adaptive) هستند.
سیستم APF–TD3 در مواجهه با موقعیتهای غیرمنتظره، تصمیمهای جدیدی میگیرد که بر اساس دادههای واقعی محیط اتخاذ میشوند، نه دستورهای از پیش تعیینشده.
به این ترتیب، سیستم عملاً هر لحظه خودش را “بازآموزی” میکند — همان چیزی که در ادبیات صنعتی با عنوان Self-Learning Optimization شناخته میشود.
نتیجهی نهایی: رباتهایی که فکر میکنند، نه فقط حرکت
هوش ترکیبی APF–TD3 نقطهی پایان «رباتهای فرمانپذیر» و آغاز عصر «رباتهای تصمیمگیر» است. در این مدل، رباتها نه فقط مسیر را دنبال میکنند، بلکه در هر لحظه تحلیل میکنند که آیا این مسیر هنوز بهترین است؟ اگر نه، در کسری از ثانیه مسیر جدیدی میسازند. در پروژههای صنعتی اخیر، این قابلیت باعث شده تأخیر حرکتی تا ۵۰٪ کاهش یابد و نرخ مأموریتهای موفق در مسیرهای پیچیده به ۹۸٪ برسد — آماری که پیشتر تنها در محیطهای شبیهسازی ممکن بود.
در واقع، چالش بزرگ لجستیک مدرن — از بنادر گرفته تا کارخانهها — دیگر یافتن مسیر نیست، بلکه یافتن “هوش مسیر” است. سیستمهایی مانند APF–TD3 نشان میدهند که آینده متعلق به محیطهایی است که در آن ماشینها میفهمند، تحلیل میکنند و تصمیم میگیرند؛ درست مثل انسان، اما سریعتر، دقیقتر و بدون خستگی.
ساختار هوش ترکیبی APF–TD3 و عملکرد آن در هدایت رباتهای حمل پالت
رباتهایی که محیط را حس میکنند، تصمیم میسازند و در لحظه مسیر را بازطراحی میکنند
فناوری هوش ترکیبی APF–TD3 نقطهی تلاقی دو جهان کاملاً متفاوت است: جهان مهندسی سنتی که روی محاسبهی مسیر و اجتناب از برخورد تمرکز دارد، و جهان هوش مصنوعی که یادگیری، تصمیمسازی و تطبیق را محور عملکرد قرار میدهد. ادغام این دو جهان، رباتی خلق میکند که نهتنها مسیر را میشناسد، بلکه منطق حرکت را نیز میفهمد؛ رباتی که نهتنها به مانع واکنش نشان میدهد، بلکه از تجربهی خود یاد میگیرد چگونه در آینده رفتار بهتری داشته باشد.
در این معماری، بخش APF همان چیزی است که ربات را در محیط هدایت میکند. این بخش مانند یک سیستم احساس فضایی، نیروهای مجازی را در اطراف ربات ترسیم میکند: نقاطی که باید به سمت آنها جذب شود و نقاطی که باید از آنها دوری کند. در نتیجه، ربات در برابر موانع، رباتهای دیگر، دیوارها، ماشینآلات و وسایل متحرک واکنش طبیعی نشان میدهد، درست مثل انسانی که هنگام حرکت در محیط شلوغ، ناخودآگاه زاویهی گامش را تغییر میدهد. حاصل آن حرکتی است روان، بیبرخورد و بدون توقفهای ناگهانی، چیزی که برای محیطهای پرترافیک بندری حیاتی است.
اما بخش دوم این معماری — یعنی TD3 — همان نقطهای است که ربات هوشمند میشود. TD3 همانند مغز تحلیلگر پشت صحنه، کل عملکرد ربات را در لحظه جمعبندی میکند: چقدر انرژی مصرف شد؟ مسیر طولانی بود یا کوتاه؟ برخورد احتمالی وجود داشت یا نه؟ تأخیر ایجاد شد یا خیر؟ سپس بر اساس نتیجه، تصمیم جدیدی برای گامهای بعد میسازد. این ترکیب دقیقاً نقطهی تفاوت نسل جدید رباتها با سیستمهای کلاسیک است. اگر APF نقش «هدایتکنندهی فوری» را ایفا کند، TD3 نقش «استراتژیست بلندمدت» را دارد؛ یعنی هر تصمیم حرکتی در آینده بهتر از گذشته میشود.
این دو بخش در کنار هم، رفتاری خلق میکنند که کاملاً انسانی و هوشمندانه بهنظر میرسد. ربات بدون اینکه نیاز به برنامهریزی دستی داشته باشد، در محیطی شلوغ حرکت میکند، خطر را تشخیص میدهد، مسیر را نگاه میکند، و حتی بر اساس رفتار رباتهای اطرافش واکنش نشان میدهد. اگر مسیری شلوغ باشد، وارد آن نمیشود؛ اگر مسیر جایگزین کوتاهتر باشد، آن را انتخاب میکند؛ اگر ربات دیگری از زاویهی خطرناک نزدیک شود، مسیر را طوری اصلاح میکند که بدون توقف از کنار آن عبور کند.
مزیت این ساختار در این است که رباتها دیگر وابسته به یک مسیر ثابت یا دستور مرکزی نیستند؛ هر ربات در هر لحظه یک عامل مستقل و تصمیمگیر است. اما این استقلال به هرجومرج منجر نمیشود، چون TD3 بهگونهای طراحی شده که یادگیری رباتها همیشه در راستای هدف جمعی کل ناوگان باشد. بهزبان ساده، هر ربات برای خودش فکر میکند، اما برای «جمع» تصمیم میگیرد — دقیقاً مانند رفتار یک تیم حرفهای که هر عضو مسئول کار خودش است اما هدف کل تیم را درک میکند.
همین ساختار باعث میشود سیستم APF–TD3 نهتنها سریع، بلکه فوقالعاده تطبیقی باشد. اگر محیط تغییر کند، مسیر عوض میشود؛ اگر ربات جدید وارد سیستم شود، بقیه خود را با آن سازگار میکنند؛ اگر ترافیک ناگهانی ایجاد شود، رباتها خودشان مسیرهای جدید میسازند. هیچ توقفی، هیچ نیاز به ریاستارت، و هیچ وابستگی به اپراتور انسانی وجود ندارد. در حقیقت، این معماری پایهگذار مفهوم لجستیک زنده است — سیستمی که مثل یک ارگانیسم رفتار میکند و بدون لحظهای توقف خود را بازطراحی میکند.
در محیطهای بزرگ مانند بنادر، این یعنی جریان حرکت همیشه در حال بهینهسازی است؛ رباتها درگیر ترافیک نمیشوند، مسیرهای پرتکرار خودبهخود کوتاهتر میشوند، و انرژی مصرفی به پایینترین سطح ممکن میرسد. در انبارهای بزرگ صنعتی نیز، رباتها نهفقط باری را جابهجا میکنند، بلکه یاد میگیرند چه زمانی وارد یک راهرو شوند یا چه زمانی از مسیر کنار روند تا مسیر بسته نشود.
به بیان دیگر، APF–TD3 فناوریای است که ربات را از سطح «ماشین دنبالکنندهی مسیر» به سطح «عامل تحلیلگر و تصمیمساز» ارتقا میدهد. همین ارتقاست که نسل جدید رباتهای حمل پالت، AGV و AMR را به نقطهی بلوغ رسانده و صنایع بزرگ را قانع کرده که این فناوری تنها راه حرکت به سمت اتوماسیون واقعی، پایدار و اقتصادی است.
تأثیرات عملی و نتایج واقعی پیادهسازی APF–TD3 در بنادر و انبارهای هوشمند
از حذف ترافیکهای ناگهانی تا جهش در سرعت گردش کالا
وقتی سیستم هوش ترکیبی APF–TD3 وارد یک بندر یا انبار میشود، اولین تغییری که هر مدیر عملیاتی فوری آن را احساس میکند، جریان یکنواخت و بدون توقف حرکت رباتها است. اگر پیش از این، رباتها در نقاط پرتردد دچار تجمع میشدند یا مجبور بودند پشت یکدیگر منتظر بمانند، در مدل APF–TD3 این رفتار تقریباً ناپدید میشود. رباتها همانند جریان آب، مسیرهای مختلف را میشناسند، از گلوگاهها دور میشوند، و با انعطاف طبیعی خود در محیط حرکت میکنند. نتیجهی این رفتار، حذف کامل توقفهای چندثانیهای و کاهش چشمگیر تأخیرهای زنجیرهای است که معمولاً در محیطهای شلوغ رخ میدهد.
در آزمایشهای عملی انجامشده در بنادر آزمایشی چین و سنگاپور، استفاده از این مدل باعث شد زمان جابهجایی هر کانتینر بین ۲۵ تا ۴۵ درصد کاهش پیدا کند؛ رقمی که در مقیاس روزانه به افزایش دهها هزار عملیات موفق منجر میشود. این بهبود، فقط از سرعت بیشتر ربات نیست، بلکه از هماهنگی عمیقی ناشی میشود که بین رباتها شکل میگیرد. هر ربات نگاه میکند، میفهمد و تصمیم میگیرد—و همین رفتار باعث میشود کل سیستم مانند یک اکوسیستم هماهنگ عمل کند، نه مجموعهای از دستگاههای جدا از هم.
یکی از تأثیرات چشمگیر APF–TD3، کاهش شدید برخوردها و توقفهای اضطراری است. در مدلهای قدیمی، کوچکترین تداخل یا اشتباه باعث میشد چند ربات به حالت توقف حفاظتی بروند تا برخورد جلوگیری شود. این توقفها بهصورت دومینویی کل جریان حملونقل را تحت تأثیر قرار میداد. اما در سیستم جدید، رباتها قبل از اینکه یک وضعیت خطرناک شکل بگیرد، مسیر خود را اصلاح میکنند و زاویهی حرکت را به شکل طبیعی تغییر میدهند. این رفتار پیشگیرانه باعث شد نرخ توقفهای حفاظتی تا ۹۰ درصد کاهش یابد—آماری که در صنایع پرریسک بسیار ارزشمند است.
در انبارهای بزرگ، هوش ترکیبی APF–TD3 مفهومی را بهوجود آورده که میتوان آن را «لجستیک بیصدا» نامید. رباتها بدون توقف ناگهانی، بدون خسخس چرخ و بدون مجبور کردن دیگر رباتها به مکث، از کنار یکدیگر عبور میکنند. مسیرها شلوغ هستند، اما جریان حرکت قطع نمیشود. این رفتار پیچیده نتیجهی تعامل دوگانهی APF و TD3 است: APF مسئول هدایت لحظهای، TD3 مسئول یادگیری و اصلاح بلندمدت. در کنار هم، سیستمی را شکل میدهند که بهطور طبیعی از ایجاد هرگونه گره حرکتی جلوگیری میکند.
از منظر انرژی، دادههای عملی نشان میدهد که رباتها پس از پیادهسازی این مدل، در هر شیفت کاری حدود ۲۰ تا ۳۰ درصد انرژی کمتری مصرف کردند. دلیلش ساده است: توقفهای کمتر و مسیرهای کوتاهتر. رباتی که بدون مکث حرکت میکند و مجبور نیست چندین بار تغییر مسیر ناگهانی بدهد، انرژی بسیار کمتری مصرف میکند. این موضوع مستقیماً هزینههای عملیاتی را پایین میآورد و عمر باتری را افزایش میدهد.
فایدهی دیگر این مدل در تسهیل مدیریت ناوگان است. در سیستمهای سنتی، اپراتورها باید دائماً وضعیت رباتها را رصد کنند، مسیرهای شلوغ را تشخیص دهند و بهصورت دستی فرمان تغییر مسیر بدهند. اما در سیستم APF–TD3، این نیاز تقریباً حذف شده است. رباتها خودشان بهترین مسیر را انتخاب میکنند و مرکز کنترل فقط نقش «ناظر کلان» دارد، نه فرمانده مستقیم. این تغییر نقش باعث شده مدیران بتوانند وقت خود را به تحلیل دادهها و تصمیمات راهبردی اختصاص دهند، نه درگیر کنترل لحظهای رباتها باشند.
در سطح کلان، بندری که از این سیستم استفاده کند، عملاً وارد کلاس جدیدی از بهرهوری میشود. سرعت تخلیه–بارگیری بالا میرود، ظرفیت روزانه بدون توسعهی فیزیکی افزایش مییابد، و بهرهوری جرثقیلها بهطور محسوسی بهتر میشود. در یکی از بنادر پیشگام، پس از اجرای APF–TD3، نرخ آمادهبهکار جرثقیلها ۳۵ درصد افزایش یافت، چون رباتها دقیقاً در لحظهای که جرثقیل خالی میشد در محل حاضر بودند. این هماهنگی، اتفاقی نیست—بلکه نتیجهی تصمیمسازی هوشمندی است که در پشت صحنه جریان دارد.
در نهایت، نقطهی اوج این فناوری در ایجاد ثبات عملیاتی (Operational Stability) است. سیستمهای سنتی با کوچکترین تغییر یا اختلال بههم میریزند، اما APF–TD3 مانند یک موجود زنده عمل میکند؛ اگر مشکلی پیش بیاید، مسیر را عوض میکند، جریان را بازتنظیم میکند و شرایط جدید را میپذیرد. این یعنی بندر یا انبار حتی زیر فشار بالا، حتی در شرایط غیرعادی، همچنان روان، قابلاعتماد و بدون اختلال کار میکند.
کاربردهای پیشرفته و آیندهی فناوری APF–TD3 در صنعت
از بنادر هوشمند تا کارخانههای خودگردان و انبارهای نسل جدید
فناوری APF–TD3 برخلاف بسیاری از راهکارهای تکمنظوره، محدود به یک محیط یا یک نوع ربات نیست؛ بلکه یک «مغز لجستیکی» است که میتواند در محیطهای مختلف پیادهسازی شود و رفتار خود را با معماری آن سازگار کند. همین ویژگی باعث شده این فناوری، از بنادر تا کارخانهها و از مراکز توزیع تا انبارهای پیچیده، بهعنوان ستون فقرات حملونقل خودکار مورد توجه قرار گیرد.
بنادر نسل آینده: اکوسیستمهای هوشمند حملونقل
در بنادر کانتینری، APF–TD3 نقشی حیاتی ایفا میکند؛ زیرا محیط بندر بهشدت پویاست و هر ثانیه تصمیمهای جدیدی بر آن اثر میگذارند. این فناوری کمک میکند رباتهای حمل پالت و AGV در هماهنگی کامل با جرثقیلهای اسکله، محوطههای انبار و مسیرهای بارگیری فعالیت کنند.
در این محیطها، APF–TD3 قادر است الگوی رفتوآمد رباتها را بهگونهای تنظیم کند که حتی در ساعات اوج ترافیک، جریان حرکت قطع نشود. رباتها در این مدل تبدیل به «کارگران خودمختار بندر» میشوند — موجوداتی دیجیتال که درک میکنند کجا باید سرعت بگیرند، کجا مسیر را تغییر دهند و کجا باید ایستگاه شارژ را در اولویت قرار دهند.
پیادهسازی این مدل باعث شده برخی بنادر به ظرفیت عملکردی برسند که پیشتر فقط با توسعه فیزیکی گسترده قابل دستیابی بود. علاوه بر آن، بنادر سبز و پایدار از این فناوری بهره میبرند تا مصرف انرژی، آلودگی و توقفهای غیرضروری را به حداقل برسانند.
انبارهای هوشمند: مسیریابی زنده میان قفسهها و عملیات چند سطحی
در انبارهای بزرگ و مراکز توزیع، مسیرها باریکتر، سرعت تغییرات بالا و جریان سفارشها پیوسته در حال تغییر است. APF–TD3 در این محیطها با قدرت یادگیری لحظهای خود نشان داده که میتواند بدون نیاز به مسیرهای علامتگذاریشده یا ساختار ازپیشتعریفشده، مسیرهای کاملاً بهینه بسازد.
رباتها مانند عناصری زنده در فضای انبار حرکت میکنند: از میان راهروهای فشرده عبور میکنند، در نقاط پرترافیک تصمیم هوشمند میگیرند، و هنگام افزایش تقاضا، وظایف را بهصورت خودکار بین خود تقسیم میکنند.
فناوری APF–TD3 باعث شده در انبارهای نسل جدید، رباتها حتی به رفتار اپراتورهای انسانی هم واکنش نشان دهند و بدون مکث، از کنار آنها عبور کنند. این یعنی همزیستی واقعی انسان–ربات در محیط لجستیک.
خطوط تولید و کارخانههای خودگردان
در کارخانههایی که پیوستگی در تولید اهمیت زیادی دارد، APF–TD3 میتواند ستون فقرات جریان مواد باشد. در محیطهایی که چندین خط تولید بهصورت همزمان کار میکنند، هر ربات باید درست در زمان مناسب، قطعه یا ابزار موردنیاز را به ایستگاه صحیح برساند. APF–TD3 با قدرت پیشبینی خود، مسیرها را طوری هماهنگ میکند که هیچ ایستگاه تولیدی با تأخیر مواجه نشود. این یعنی حذف گلوگاههای داخلی، افزایش سرعت مونتاژ و کاهش وابستگی به نیروی انسانی در بخش حمل مواد.
در صنایع خودرو، الکترونیک و فلزات سنگین، این فناوری به رباتها قدرت میدهد که همچون یک ناوگان هماهنگ، با دقت میلیمتری مواد را جابهجا کنند و جریان تولید را پایدار و بدون توقف نگه دارند.
لجستیک داخلی (Intralogistics) و مدیریت جریان مواد
در بسیاری از صنایع، مشکل اصلی نه در حمل برونسازمانی، بلکه در مدیریت جریان داخلی مواد است. اینجا دقیقاً جایی است که APF–TD3 میدرخشد. این فناوری اجازه میدهد رباتها با درک لحظهای از وضعیت کارخانه، بهترین مسیر را برای انتقال مواد انتخاب کنند. این یعنی هیچ مأموریت حملی معطل نمیشود، هیچ رباتی در صف مسیر نمیماند، و هیچ جریان کاری از مسیر خودش خارج نمیشود.
در محیطهای پیچیده، مثل کارخانههای چندسطحی، APF–TD3 میتواند حتی بین طبقات مختلف، زمان ورود و خروج رباتها را هماهنگ کند و بهصورت خودکار نقطهی تعادل جریان مواد را پیدا کند.
فرودگاهها، بیمارستانها و مراکز پرتردد
قدرت این فناوری فقط در محیطهای صنعتی خلاصه نمیشود. APF–TD3 میتواند در محیطهایی با حضور گستردهی انسان — مثل فرودگاهها یا بیمارستانها — برای حمل تجهیزات، دارو، بار یا بستهها استفاده شود. در چنین محیطهای حساسی، رباتها باید دقیق، ایمن و قابل پیشبینی رفتار کنند. APF–TD3 به رباتها کمک میکند رفتار اجتماعیتری داشته باشند، از مسیرهای کمخطرتر عبور کنند و حتی حرکت خود را بر اساس الگوی تردد انسانی تنظیم کنند.
آیندهی این فناوری؛ از تصمیمسازی تا خودمختاری کامل
مسیر تکامل APF–TD3 تازه آغاز شده است. ترکیب آن با شبکههای 5G، سیستمهای V2X، و دوقلوهای دیجیتال (Digital Twin) آیندهای را میسازد که در آن رباتها: داده را جمع میکنند، تصمیم میگیرند، مسیر میسازند و در نهایت بهصورت جمعی سیستم را مدیریت میکنند. در این آینده، رباتهای حمل پالت و AGV نهتنها بخشی از عملیات خواهند بود، بلکه مدیران پنهان لجستیک محسوب میشوند—کل زنجیرهی تامین بر پایهی تصمیمات آنها حرکت میکند.
جمعبندی استراتژیک و مزیت رقابتی برای شرکتهای فعال در حوزهی AGV
جایی که هوش تصمیمگیر با ارزش اقتصادی گره میخورد
فناوری APF–TD3 فقط یک الگوریتم یا یک راهکار مسیریابی نیست؛ بلکه یک سرمایهی استراتژیک است که آیندهی لجستیک هوشمند را تعیین میکند. شرکتهایی که این فناوری را توسعه یا پیادهسازی میکنند، در واقع وارد ردهای از رقابت میشوند که در آن سرعت، دقت و هوشمندی، معیارهای اصلی موفقیت هستند. این فناوری یک مزیت لحظهای نیست؛ یک برتری ماندگار است که ساختار کل زنجیرهی تامین را دگرگون میکند.
مزیت رقابتی در سطح فناوری؛ رباتهایی که “تصمیم” میگیرند
شرکتهایی که از APF–TD3 بهره میبرند، محصولاتی ارائه میدهند که یک ویژگی کلیدی دارند: خودمختاری واقعی.
این یعنی رباتها نهتنها به حسگرها و مسیرهای ثابت متکی نیستند، بلکه قادرند محیط را تحلیل کنند، رفتار سایر رباتها را پیشبینی کنند و راهحلهایی بسازند که بهینهتر از طراحی انسانی است. این سطح از هوشمندی باعث میشود برند شرکت، از یک تولیدکنندهی معمولی ربات، تبدیل شود به یک سازندهی سیستمهای لجستیکی با قدرت تفکر دیجیتال — جایگاهی که ارزش آن در بازار جهانی هر سال بیشتر میشود. در جهانی که همهچیز به سمت تصمیمگیری هوشمند حرکت میکند، شرکتهایی که هوش راهبردی در محصولاتشان دارند، برندهی رقابت خواهند بود.
مزیت اقتصادی؛ کاهش هزینه برای مشتری = افزایش جذابیت برند
یکی از بزرگترین دلایل علاقهی صنایع به رباتهای AGV، کاهش هزینهی تمامشدهی عملیات است. اما APF–TD3 این کاهش هزینه را چند برابر میکند. چرا؟ چون دیگر رباتها «حرکت» نمیکنند — بهینه حرکت میکنند. این یعنی: مصرف انرژی کمتر، استهلاک پایینتر، نیاز کمتر به نگهداری، توقف عملیاتی نزدیک به صفر و عمر بالاتر تجهیزات. برای مشتری، این یعنی هزینههای عملیاتی پایین + بازگشت سرمایه سریع. برای شرکت سازندهی ربات، این یعنی محصولی که خودش ارزشش را ثابت میکند و نیاز به فروش سخت ندارد.
مزیت عملیاتی؛ کارایی در هر محیط، از بندر تا کارخانه
فناوری APF–TD3 توانایی کار در محیطهایی با پیچیدگی بالا را دارد؛ از بنادر چندجرثقیلی گرفته تا انبارهای چندراهروی تنگ، خطوط تولید چندلایه، یا کارخانههای خودگردان. این تطبیقپذیری همان چیزی است که مشتریهای صنعتی بهدنبالش هستند:
یک ربات که هرجا بگذاریاش کار کند و مجبور نباشی فرآیندهای داخلی را برایش تغییر دهید. شرکتهایی که این سطح از انعطاف را ارائه میدهند، عملاً کل بازار را هدف میگیرند — نه فقط یک بخش محدود از صنعت.
مزیت برند؛ جایگاهسازی بهعنوان رهبر اتوماسیون هوشمند
وقتی یک شرکت بتواند نشان دهد رباتهایش نهفقط سختافزار، بلکه هوش داخلی دارند، در ذهن مشتری به رهبر صنعت تبدیل میشود. مشتریها اعتماد میکنند چون میبینند سیستمها: کمتر خطا میکنند، کمتر توقف دارند، جریان کاری را پایدارتر نگه میدارند و با آیندهی دیجیتال سازگار هستند.
در دنیای رقابتی امروز، برندهایی که هوشمندی را بهعنوان DNA محصولات خود معرفی میکنند، شانس بیشتری برای عقد قراردادهای بزرگ، همکاریهای بینالمللی و توسعه بازار دارند.
مزیت آیندهمحور؛ پیوند طبیعی با IoT، 5G و Digital Twin
APF–TD3 بهطور طبیعی با فناوریهای آینده تمایز پیدا میکند. وقتی این الگوریتم با شبکههای 5G صنعتی، حسگرهای IoT و سیستمهای دوقلوی دیجیتال ترکیب شود، کل اکوسیستم لجستیک به یک سیستم خودفهم، خودتحلیل و خودتصمیم تبدیل میشود. در این آینده، ربات فقط یک ماشین نیست — یک گره هوشمند اتصالیافته در شبکهای از دادههاست. شرکتهایی که امروز APF–TD3 را در محصولاتشان پیاده میکنند، فردا ستون اصلی صنعت «لجستیک خودمختار جهانی» خواهند بود.
پیام نهایی برای مدیران و تصمیمگیران
اگر کسبوکاری در حوزه لجستیک، تولید، انبارداری یا حملونقل صنعتی فعالیت میکند، فناوری APF–TD3 یک «مزیت اختیاری» نیست — یک ضرورت رقابتی است. این فناوری آیندهی صنعت را تعیین میکند، چون: هزینه را کاهش میدهد، سرعت را افزایش میدهد، ایمنی را بالا میبرد و سیستم را هوشمند و پایدار میکند.
شرکتهایی که امروز وارد این مسیر میشوند، فردا پیشگامان صنعت خواهند بود — و شرکتهایی که عقب بمانند، مجبور خواهند شد تمام مسیر را از دیگران تقلید کنند.
نتیجهگیری نهایی، دعوت به اقدام و رفرنس صنعتی
از هوشمندی رباتها تا تحول واقعی در لجستیک مدرن
فناوری APF–TD3 امروز فقط یک الگوریتم یا یک مدل مهندسی نیست؛ بلکه در عمل، قلب تپندهی نسل جدید رباتهای حمل پالت، AGVها و سیستمهای لجستیک خودکار است. این فناوری ثابت کرده که میتواند جریان حرکت در محیطهای پیچیده را بدون توقف، بدون ازدحام و با کمترین مصرف انرژی هدایت کند. در بنادر، این یعنی افزایش سرعت تخلیه و بارگیری؛ در انبارها یعنی گردش روان کالا؛ و در کارخانهها یعنی جریان مواد بدون گلوگاه. در همهی این محیطها، نتیجهی نهایی یک چیز است: بهرهوری که خودش را هر ثانیه بازتولید میکند. رباتهایی که به APF–TD3 مجهزند، فقط وظیفه انجام نمیدهند — بلکه تصمیمهای دقیق و هوشمند میگیرند، مسیر را بر اساس شرایط لحظهای اصلاح میکنند و از هر تجربه برای بهینهسازی بعدی استفاده میکنند. همین چرخهی یادگیری است که این فناوری را از تمام نسلهای قبلی مسیریابی متمایز میکند و آن را تبدیل به یک سرمایهی استراتژیک واقعی برای صنعت میسازد.
در جهان رقابتی امروز، زمانی برای تردید وجود ندارد. سرعت، دقت و قابلیت پیشبینی دیگر مزیت نیستند — استاندارد هستند. آنچه یک شرکت را متمایز میکند، تواناییاش در پیادهسازی سیستمهایی است که میتوانند بدون دخالت انسان تصمیم بگیرند و عملکرد خود را بهبود دهند. APF–TD3 دقیقاً چنین قابلیتی را ارائه میدهد. این فناوری بهصورت طبیعی با شبکههای 5G صنعتی، سنسورهای IoT و سیستمهای دوقلوی دیجیتال ترکیب میشود و زیرساختی میسازد که در آن رباتها نه بهعنوان ابزار، بلکه بهعنوان اجزایی از یک «مغز لجستیکی جمعی» عمل میکنند.
برای مدیران، سرمایهگذاران و رهبران صنعتی، زمان ورود به این فناوری همین حالاست. بنادر و کارخانههایی که این سیستم را امروز پیاده میکنند، در دو سال آینده به سطحی از بهرهوری میرسند که رقبا حتی توان رقابت با آن را نخواهند داشت. هزینههای عملیاتی پایینتر، مقیاسپذیری کامل، تکرارپذیری وظایف با دقت بالا، و ثبات عملیاتی در هر شرایط — همهی اینها خروجیهایی هستند که APF–TD3 برای سازمان به ارمغان میآورد. این انتخاب یک قدم فناورانه نیست؛ یک تصمیم تجاری هوشمندانه است که مستقیماً روی سودآوری، رشد و مزیت رقابتی اثر میگذارد.
دعوت به اقدام
اگر کسبوکار شما در هر بخش از زنجیرهی لجستیک فعال است — از بندر گرفته تا انبار، از تولید گرفته تا توزیع — وقت آن رسیده که APF–TD3 را وارد قلب عملیات خود کنید. رباتهای حمل پالت و AGVهای مجهز به این فناوری، عملکرد محیط شما را نهتنها سریعتر، بلکه هوشمندتر، پایدارتر و ارزانتر میکنند. اولین قدم ساده است: تحلیل وضعیت فعلی جریان حملونقل + شبیهسازی مدل APF–TD3 + پیادهسازی در مقیاس محدود. پس از آن، سیستم بهصورت طبیعی گسترش پیدا میکند و کل شبکهی لجستیک را به ساختاری منظم، قابل پیشبینی و بهینه تبدیل میکند.
این همان آیندهای است که بنادر پیشرو، کارخانههای نسل پنجم و انبارهای خودگردان به آن قدم گذاشتهاند — و حضور شما در این مسیر یعنی ورود به صفحهی جدیدی از رقابت صنعتی.
🔹 رفرنس:مبنای علمی این گزارش برگرفته از مقالهی:
“Autonomous Port Management Based AGV Path Planning and Optimization via an Ensemble Reinforcement Learning Framework,”
Ocean & Coastal Management, 2024.



{kind=link}
بدون نظر