

چارچوب تصمیمگیری مشارکتی عمومی برای رباتهای حملبار خودکار در شبکههای لجستیکی چندمسیره
در عصر جدید اتوماسیون، کارخانهها، انبارهای هوشمند و مراکز توزیع دیگر تنها به مجموعهای از ماشینهای منفرد متکی نیستند، بلکه به اکوسیستمهایی از رباتهای حملبار خودکار تبدیل شدهاند که با دقت و هماهنگی بالا وظیفهی جابهجایی مواد، قطعات و محصولات را بر عهده دارند. این رباتها که با نامهای AMR (Autonomous Mobile Robot) و AGV (Automated Guided Vehicle) شناخته میشوند، ستون فقرات لجستیک در صنعت ۴.۰ هستند. اما با افزایش تراکم مسیرها، تنوع مأموریتها و نیاز به حرکت همزمان در مسیرهای مشترک، مسئلهی تصمیمگیری میان این رباتها به یکی از پیچیدهترین چالشهای لجستیک مدرن تبدیل شده است. دیگر تنها برنامهریزی مسیر کافی نیست؛ بلکه لازم است رباتها بتوانند در لحظه و بهصورت جمعی تصمیم بگیرند، اولویتها را تنظیم کنند، مسیرهای موازی را انتخاب کنند و بدون توقف یا برخورد، جریان حرکتی کل شبکه را حفظ نمایند.
در محیطهای واقعی، مسیرهای حرکتی رباتهای حملبار اغلب دارای چند شاخهی متقاطع، نقاط همپوشان، نواحی بارگیری مشترک و حتی گلوگاههای حرکتی هستند. در چنین شبکههایی، تصمیمگیری تنها بر اساس مسیر کوتاهتر یا انرژی کمتر، کارآمد نیست. هر تصمیم باید با درنظرگرفتن رفتار سایر رباتها، حجم ترافیک لحظهای، محدودیتهای فیزیکی مسیر و اولویت مأموریت انجام شود. این یعنی تصمیمگیری باید مشارکتی و سازگار با شرایط جمعی باشد. در عمل، چنین نیازی معادل با طراحی یک «چارچوب تصمیمگیری هماهنگ و عمومی» است که بتواند با هر توپولوژی از مسیرها، هر تعداد ربات و هر سناریوی حرکتی سازگار شود — و همین دقیقاً محور اصلی مقالهی حاضر است.
چارچوب پیشنهادی با الهام از سیستمهای حملونقل خودکار و نظریهی تصمیمگیری تعاملی، مفهومی تازه را وارد دنیای رباتهای صنعتی میکند: تصمیمگیری مشارکتی عمومی (Universal Cooperative Decision-Making). این چارچوب، رباتها را نه بهعنوان عناصر جداگانه بلکه به عنوان گرههای یک شبکهی تعاملی در نظر میگیرد که از طریق تبادل داده و تحلیل بلادرنگ، به تصمیمهای جمعی میرسند. هر ربات علاوه بر وضعیت خود، وضعیت همسایگان، ازدحام مسیر و محدودیتهای زمانی را نیز در نظر میگیرد. سپس کل سیستم با حل یک مدل بهینهسازی مشترک، تصمیمهایی تولید میکند که در آن تضادها حداقل و بهرهوری کل حداکثر میشود.
تفاوت بنیادین این مدل با سیستمهای سنتی در آن است که بهجای طراحی الگوریتمهای مجزا برای هر محیط، از یک چارچوب واحد و عمومی استفاده میشود که میتواند خود را با هر نقشه، مسیر یا توپولوژی سازگار کند. در زبان فنی، این معماری بر پایهی نمایش گرافی شبکهی حرکتی بنا شده است؛ جایی که مسیرها، تقاطعها و نقاط بارگیری بهصورت گرهها و یالها مدل میشوند و روابط بین رباتها در قالب محدودیتهای ریاضی و تصمیمگیری گروهی فرموله میگردد. چنین نمایش گرافی به سیستم اجازه میدهد تا نهتنها در مسیرهای ساده بلکه در شبکههای چندسطحی، مسیرهای حلقوی و حتی ساختارهای بازگشتی نیز تصمیمگیری جمعی را مدیریت کند.
در نگاه صنعتی، این مدل دقیقاً همان چیزی است که سیستمهای لجستیکی آینده به آن نیاز دارند: سیستمی که بتواند در محیطهای پیچیده با دهها ربات فعال، بدون نظارت انسانی و در عین حال با نظم و ایمنی بالا کار کند. با رشد بیسابقهی حجم جابهجایی مواد در صنایع دارویی، خودروسازی، پتروشیمی و خردهفروشی هوشمند، تصمیمگیری بلادرنگ میان رباتها نه یک قابلیت اضافی، بلکه یک الزام حیاتی برای حفظ پایداری شبکهی لجستیکی است.
در واقع، مقالهی حاضر با ارائهی این چارچوب تصمیمگیری مشارکتی عمومی، گامی فراتر از بهینهسازی مسیر یا کنترل ترافیک برداشته است. این چارچوب، نوعی ذهن جمعی برای رباتها ایجاد میکند؛ ذهنی که میتواند بیندیشد، اولویتبندی کند، سازگار شود و تصمیمهای محلی را در راستای هدف کل سیستم هماهنگ سازد. به بیان دیگر، اگر تا دیروز هر ربات تنها بازیگر نقش خود بود، امروز در پرتو این رویکرد جدید، همهی رباتها اعضای یک تیم هوشمند و هماهنگاند که مأموریتشان نه حرکت فردی، بلکه بهرهوری جمعی در سطح شبکه است.
چالشهای فعلی در تصمیمگیری میانرباتی و محدودیت سیستمهای کنترل متمرکز
اگرچه رباتهای حملبار خودکار در سالهای اخیر پیشرفت چشمگیری در دقت، سرعت و ناوبری داشتهاند، اما هنوز در یک نقطهی بحرانی گرفتارند: فقدان تصمیمگیری جمعی و تطبیقپذیر. بیشتر ناوگانهای AMR و AGV فعلی بر پایهی مدلهای کنترل متمرکز کار میکنند، یعنی یک سرور یا مرکز فرماندهی مسیر و زمانبندی حرکت همهی رباتها را تعیین میکند. این مدل در محیطهای ساده و با تراکم پایین، عملکرد قابلقبولی دارد، اما در شبکههای چندمسیره و پویا، جایی که مسیرها تلاقی دارند و مأموریتها همزمان اجرا میشوند، بهسرعت دچار ناپایداری، ازدحام و توقفهای زنجیرهای میشود.
در چنین محیطهایی، تصمیمگیری متمرکز از دو جهت محدودیت ذاتی دارد: زمان و مقیاس. هرچه تعداد رباتها افزایش یابد، حجم دادههایی که باید در مرکز پردازش شود بهصورت نمایی رشد میکند. هر تغییر کوچک در موقعیت یک ربات، بر تصمیم کل شبکه تأثیر میگذارد، و این تأخیر محاسباتی باعث میشود تصمیمها دیر صادر شوند و در عمل بیاثر شوند. از سوی دیگر، در شبکههای واقعی ارتباط بیوقفه میان رباتها و مرکز همواره ممکن نیست؛ تداخل سیگنال، محدودیت پهنای باند و تأخیر ارتباطی باعث میشود بخشی از اطلاعات بهموقع نرسد. در نتیجه، مرکز فرماندهی بر اساس دادههای ناقص تصمیم میگیرد، و این امر منجر به تصمیمهای غیرواقعی یا ناهماهنگ در میدان عمل میشود.
علاوه بر این، سیستمهای متمرکز معمولاً فاقد توانایی تطبیق سریع با تغییرات محیطی هستند. در انبارهای پویا یا خطوط تولید زنده، مسیرها ممکن است بهطور موقت توسط تجهیزات یا اپراتورها مسدود شوند. در چنین شرایطی، اگر کنترل مرکزی نتواند در زمان کوتاه مسیرهای جایگزین را بازتخصیص دهد، کل شبکه دچار اختلال میشود. تجربهی صنعتی نشان داده است که در شبکههایی با بیش از ۵۰ ربات، حتی تأخیر چندثانیهای در صدور تصمیم جدید میتواند به بنبست حرکتی گسترده منجر شود. این پدیده در ادبیات مهندسی لجستیک با عنوان Traffic Freezing شناخته میشود؛ زمانی که ازدحام تصمیمگیری باعث توقف فیزیکی کل سیستم میشود.
از سوی دیگر، رویکردهای غیرمتمرکز کلاسیک نیز پاسخ کامل به این چالش نیستند. در این مدلها، هر ربات بهطور مستقل تصمیم میگیرد، اما چون از رفتار سایر رباتها بیخبر است، تصمیمهای محلی ممکن است با تصمیمهای دیگران تضاد پیدا کند. در عمل، این تضادها به شکل رقابت برای مسیر، عبور همزمان از تقاطعها و توقفهای ناگهانی بروز میکنند. بهویژه در محیطهای چندمسیره که مسیرهای عبور و بازگشت در نزدیکی هم قرار دارند، فقدان هماهنگی میان تصمیمهای مستقل باعث شکلگیری ترافیکهای تصادفی و کاهش شدید کارایی میشود. این مسئله در ناوگانهای بزرگتر بهصورت زنجیرهای گسترش مییابد و در نهایت سیستم را از وضعیت پایدار خارج میکند.
یکی دیگر از محدودیتهای بنیادی سیستمهای موجود، عدم تعمیمپذیری به توپولوژیهای مختلف مسیر است. بسیاری از الگوریتمهای کنترل فعلی برای محیطهای خاص طراحی شدهاند: مثلاً یک الگوریتم برای مسیرهای دایرهای، دیگری برای مسیرهای شبکهای یا خطی. این یعنی هر بار که چیدمان فیزیکی محیط تغییر کند — مانند اضافه شدن خطوط بارگیری جدید یا تغییر موقعیت ایستگاهها — باید الگوریتم از ابتدا تنظیم یا بازآموزی شود. این فرایند زمانبر، پرهزینه و در محیطهای پویا کاملاً غیراقتصادی است. در نتیجه، صنعت به چارچوبی نیاز دارد که بتواند بهصورت عمومی و بدون وابستگی به شکل مسیرها عمل کند؛ چارچوبی که صرفنظر از نقشه یا ساختار محیط، منطق تصمیمگیری مشارکتی را حفظ کند.
علاوه بر چالشهای فنی، یک بُعد انسانی نیز در این مسئله وجود دارد. در بسیاری از کارخانهها و انبارها، رباتها در کنار اپراتورهای انسانی کار میکنند. نبود سیستم تصمیمگیری مشارکتی باعث میشود رباتها گاهی در مسیر انسانها قرار گیرند یا برای اجتناب از برخورد، ناگهان متوقف شوند. این رفتارهای غیرقابل پیشبینی نهتنها بهرهوری را کاهش میدهد بلکه اعتماد اپراتورهای انسانی به رباتها را هم از بین میبرد. در مقابل، در سیستمهای مشارکتی که تصمیمها بهصورت جمعی گرفته میشوند، رفتار رباتها روانتر و پیشبینیپذیرتر است و همکاری انسان–ماشین بهصورت طبیعیتر شکل میگیرد.
در نهایت، مشکل اصلی سیستمهای فعلی این است که آنها یا خیلی متمرکز و کند هستند، یا خیلی پراکنده و ناهماهنگ. صنعت به راهحلی نیاز دارد که بتواند میان این دو رویکرد تعادل ایجاد کند: چارچوبی که هم مزایای هماهنگی جمعی را حفظ کند و هم چابکی تصمیمگیری محلی را از بین نبرد. مقالهی حاضر دقیقاً با همین هدف شکل گرفته است — طراحی یک چارچوب تصمیمگیری مشارکتی عمومی که بتواند رباتهای حملبار را در هر توپولوژی مسیر و در هر تراکم حرکتی، بهصورت هوشمند، هماهنگ و بدون وابستگی به کنترل مرکزی هدایت کند.
دیدگاه نوآورانه و منطق طراحی چارچوب تصمیمگیری مشارکتی عمومی
در قلب این پژوهش، مفهومی نهفته است که میتواند آیندهی لجستیک خودکار را متحول کند: یگانگی تصمیمگیری میان رباتها در محیطهای پیچیده و چندمسیره. نوآوری کلیدی مقاله در این است که تصمیمگیری در میان دهها ربات حملبار را از سطح الگوریتمهای پراکنده و وابسته به نقشه، به سطحی از منطق عمومی، ریاضیمحور و ساختاریافته ارتقا میدهد. این چارچوب طوری طراحی شده که بدون نیاز به بازتعریف الگوریتم، بتواند در هر شبکهای — از انبارهای ساده با مسیرهای مستقیم تا کارخانههای چندسطحی با نقاط تلاقی پیچیده — همان کارایی و هماهنگی را حفظ کند.
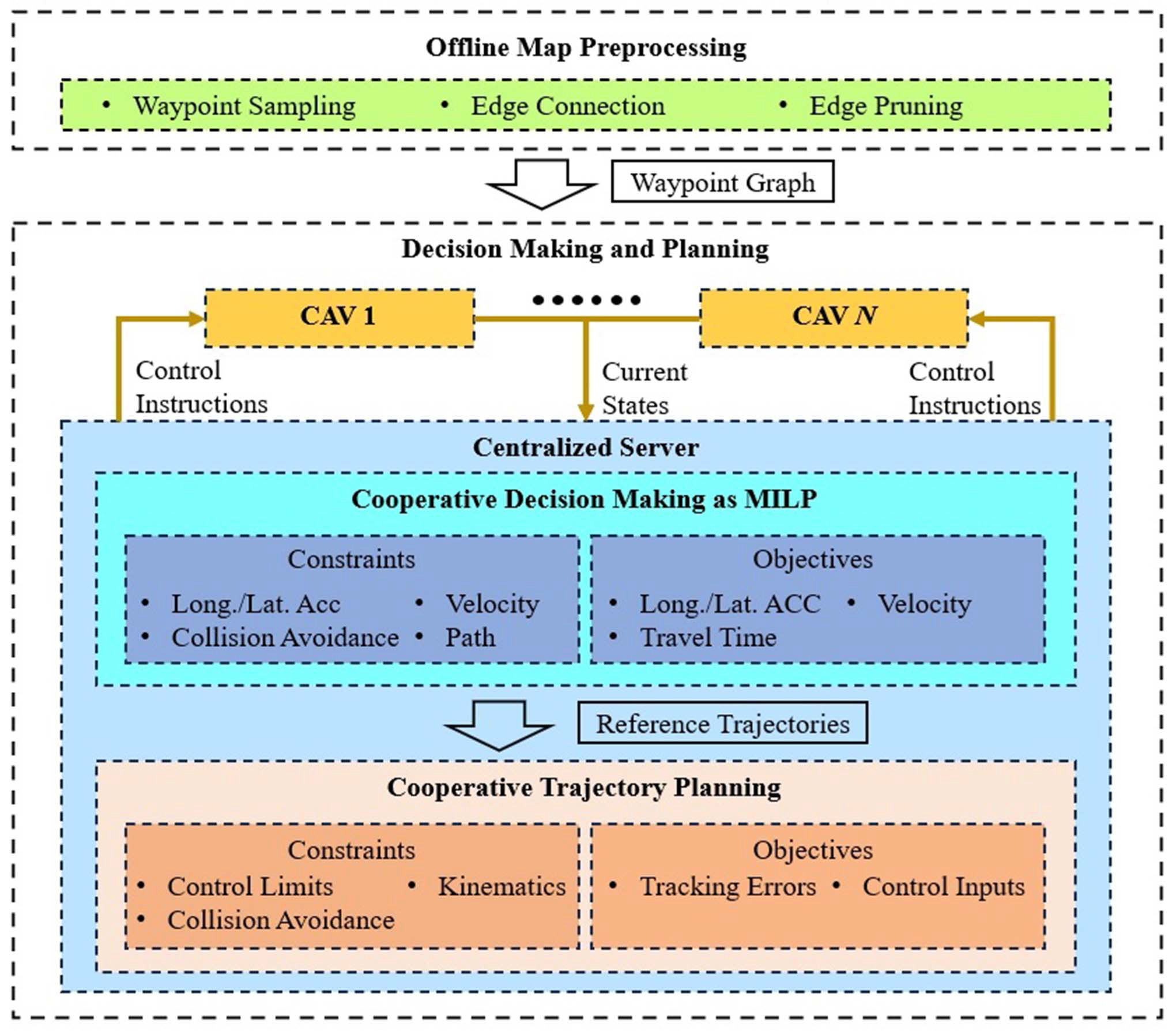
در این مدل، هر محیط کاری بهصورت یک گراف جهتدار بدون حلقه (Directed Acyclic Graph – DAG) بازنمایی میشود. این بازنمایی، گام نخست در دستیابی به تصمیمگیری مشارکتی است، زیرا به رباتها اجازه میدهد تا ساختار مسیر، ارتباط گرهها (نقاط تصمیمگیری) و محدودیتهای حرکت را بهصورت واحد درک کنند. هر گره در این گراف معادل یک موقعیت فیزیکی یا نقطهی عملیاتی در محیط است — مانند محل بارگیری، ایستگاه شارژ یا نقطهی عبور. یالها (ارتباط بین گرهها) نیز مسیرهای ممکن میان این نقاط را نمایش میدهند. در نتیجه، حرکت هر ربات در محیط واقعی معادل عبور از یک مسیر ریاضی در این گراف است.
اما نقطهی قوت این مدل، در نحوهی تعامل میان رباتها در همین ساختار گرافی نهفته است. در رویکرد مقاله، بهجای آنکه هر ربات مسیر خود را بهطور مستقل انتخاب کند، کل ناوگان بهصورت جمعی تصمیم میگیرد که کدام مسیرها باید در چه زمانی و با چه ترتیبی مورد استفاده قرار گیرند. این تصمیمگیری جمعی از طریق حل یک مسئلهی بهینهسازی خطی عدد صحیح مختلط (Mixed-Integer Linear Programming – MILP) انجام میشود. این مدل بهگونهای فرموله شده که هدف آن کمینهسازی تضادها، کاهش زمان انتظار، بهینهسازی مصرف انرژی و تضمین جریان روان ترافیک در سطح شبکه است.
در این چارچوب، هر ربات بهعنوان یک عامل تصمیمگیر (Decision-Making Agent) مدل میشود که مجموعهای از گزینههای حرکت دارد. این گزینهها شامل مسیرهای ممکن، اولویتهای زمانی و محدودیتهای حرکتی است. سپس، تابع هدف کلی سیستم تلاش میکند تا میان تمام این گزینهها، بهترین ترکیب ممکن را پیدا کند؛ ترکیبی که در آن هیچ دو رباتی در یک زمان در یک مسیر همپوشان نباشند و کل شبکه در کمترین زمان به وضعیت پایدار برسد. بهعبارتی، سیستم نهتنها مسیر هر ربات بلکه رفتار جمعی ناوگان را بهینه میکند.
برای دستیابی به انعطافپذیری بالا، مدل بهگونهای طراحی شده که توپولوژی مسیر را از منطق تصمیمگیری جدا میکند. یعنی ساختار تصمیمگیری برای هر نوع نقشهی جدید نیاز به تغییر ندارد؛ تنها گراف مسیر بهصورت دینامیک تولید میشود و بلافاصله وارد فرآیند بهینهسازی میگردد. این ویژگی همان چیزی است که مقاله آن را قابلیت عمومیسازی (Universality) مینامد — قابلیتی که باعث میشود سیستم در انبارها، کارخانهها، بنادر و هر محیطی با ساختار مسیر متفاوت بهصورت یکسان عمل کند.
یکی از وجوه برجستهی این مدل، استفاده از همکاری ریاضیمحور میان رباتها است. بهجای تبادل مستقیم دستورات، رباتها با ارسال اطلاعات موقعیت و وضعیت خود به یک فضای تصمیمگیری مشترک، در حل یک مسئلهی جمعی مشارکت میکنند. هر ربات نهتنها از دادههای خود بلکه از اطلاعات شبکه آگاه است. در نتیجه، تصمیم نهایی از ترکیب سه مؤلفه شکل میگیرد:
۱. وضعیت محلی هر ربات (مکان، سرعت، مأموریت)،
۲. وضعیت جمعی شبکه (تعداد رباتهای فعال، مسیرهای اشغالشده، نقاط تقاطع)،
۳. و تابع هدف سراسری سیستم (کاهش تأخیر و افزایش کارایی).
با این ساختار، تضاد میان تصمیمهای فردی و منافع جمعی از بین میرود. هر تصمیم محلی بهطور خودکار در راستای هدف کل سیستم تنظیم میشود. این یعنی تمرکززدایی هوشمندانه (Smart Decentralization): رباتها هنوز مستقلاند، اما استقلالشان هماهنگ و هدفمند است.
در مقاله تأکید شده است که مدل پیشنهادی بهصورت آنی (Real-Time) و با بهروزرسانی پویا عمل میکند. بهمحض تغییر وضعیت یکی از رباتها یا مسدود شدن یک مسیر، سیستم گراف مسیر را مجدداً بازسازی و تصمیمها را بهصورت جمعی اصلاح میکند. این بازآرایی خودکار، پایداری شبکه را تضمین میکند و مانع از بروز بنبست یا ازدحام ناگهانی میشود. در واقع، چارچوب پیشنهادی نه یک مدل ایستا بلکه یک «مغز پویا برای ناوگان رباتها» است که دائماً وضعیت خود را پایش و بهینه میکند.
در سطح بالاتر، این چارچوب عملاً یک لایهی شناختی (Cognitive Layer) برای سیستمهای لجستیکی ایجاد میکند؛ لایهای که نهتنها تصمیمگیری را هماهنگ میسازد بلکه از دادههای گذشته برای پیشبینی آینده نیز استفاده میکند. با ذخیرهسازی نتایج تصمیمهای موفق، سیستم در گذر زمان یاد میگیرد که در سناریوهای مشابه چگونه رفتار کند. این یادگیری جمعی، سرعت همگرایی تصمیمها را افزایش داده و سیستم را به مرور هوشمندتر میسازد.
در نگاه کلان، منطق طراحی چارچوب تصمیمگیری مشارکتی عمومی، پلی است میان مهندسی کنترل کلاسیک و هوش جمعی مدرن. از یک سو، مدل با اصول دقیق ریاضی و بهینهسازی ساختاریافته طراحی شده و از سوی دیگر، رفتار خروجی آن شباهت بسیاری به رفتار طبیعی گروههای هوشمند دارد: هماهنگی، انطباق، پیشبینی و همکاری. این ترکیب منحصربهفرد، سیستم را به نمونهای از هوش تصمیمگیری مشارکتی صنعتی (Industrial Cooperative Intelligence) تبدیل کرده است — ذهنی که درون ناوگان رباتها شکل میگیرد و تصمیمها را به نفع کل شبکه میگیرد، نه تنها یک جزء از آن.
روش پیشنهادی و فرآیند گامبهگام اجرای تصمیمگیری مشارکتی
در معماری پیشنهادی این مقاله، فرآیند تصمیمگیری مشارکتی میان رباتهای حملبار بهصورت یک چرخهی چندمرحلهای طراحی شده است که از مدلسازی توپولوژی مسیر آغاز میشود و با اتخاذ تصمیمهای بهینهی جمعی در لحظه پایان مییابد. این چرخه با هدف دستیابی به هماهنگی بلادرنگ در شبکههای لجستیکی چندمسیره توسعه یافته و هر مرحله آن طوری طراحی شده که استقلال، همکاری و پایداری سیستم را به طور همزمان تضمین کند.
۱. مدلسازی محیط و نمایش گرافی مسیر
در گام نخست، محیط کاری شامل مسیرهای حرکتی، نقاط بارگیری، ایستگاههای شارژ و تقاطعها، به یک گراف جهتدار بدون حلقه (DAG) تبدیل میشود. در این گراف، هر گره (Node) معرف یک موقعیت فیزیکی خاص است، و هر یال (Edge) نمایانگر مسیر مستقیم میان دو نقطه است. این نمایش گرافی به رباتها اجازه میدهد که محیط را به شکل ساختاریافته و قابل محاسبه درک کنند.
برخلاف نقشههای کلاسیک که بر اساس مختصات هندسی کار میکنند، در این مدل ارتباطات، تقدمها و محدودیتها در قالب روابط گرافی بیان میشوند. در نتیجه، حتی اگر ساختار فیزیکی مسیرها تغییر کند (افزودن یک مسیر جدید یا حذف یک ایستگاه)، تنها لازم است گراف مسیر بهروزرسانی شود، نه منطق تصمیمگیری. این ویژگی انعطافپذیری توپولوژیک، اساس «عمومیت» چارچوب پیشنهادی است.
۲. تخصیص مأموریت و تعریف اهداف رباتها
پس از مدلسازی محیط، هر ربات مأموریتی خاص دریافت میکند — مثلاً حمل پالت از گره A به گره F، یا انتقال قطعات از ایستگاه تولید به انبار موقت. این مأموریتها بهصورت مجموعهای از قیود و اهداف در مدل ریاضی ثبت میشوند. هر مأموریت شامل پارامترهایی مانند زمان شروع، محدودیت انرژی، فاصلهی ایمن از سایر رباتها و مسیرهای مجاز است.
نکتهی کلیدی در این مرحله آن است که اهداف همهی رباتها به تابع هدف مشترک سیستم متصل میشوند. این تابع هدف نه بر اساس منافع فردی، بلکه بر پایهی حداکثرسازی کارایی کل ناوگان طراحی شده است. به بیان ساده، رباتها یاد میگیرند که تصمیمهای خود را به نفع کل مجموعه تنظیم کنند؛ اگر لازم باشد اندکی از سرعت خود بکاهند تا شبکه روانتر شود، الگوریتم آن را انتخاب میکند.
۳. تشکیل مدل تصمیمگیری مشارکتی (Cooperative Decision Model)
در این مرحله، کل وضعیت شبکه در قالب یک مسئلهی بهینهسازی عدد صحیح مختلط (MILP) فرموله میشود. در این مدل، متغیرهای تصمیم شامل موقعیت رباتها، انتخاب مسیر، ترتیب عبور از تقاطعها و زمان ورود به هر گره هستند. قیود مدل تضمین میکنند که هیچ دو رباتی همزمان در یک مسیر یا گره مشترک حضور نداشته باشند و محدودیتهای انرژی و زمان نیز رعایت شوند.
تابع هدف کلی معمولاً ترکیبی از چند معیار است — مانند کمینهسازی مجموع زمان مأموریتها، کاهش تأخیر ناشی از ازدحام و افزایش تعادل بار حرکتی میان مسیرها. با حل این مدل، مجموعهای از تصمیمها بهدست میآید که همزمان تعارضها را حذف و بهرهوری کل سیستم را حداکثر میکند.
۴. تبادل داده و همترازی تصمیمها میان رباتها
پس از شکلگیری تصمیمهای پیشنهادی، هر ربات دادههای محلی خود — شامل موقعیت فعلی، سطح انرژی، وضعیت بار و سرعت — را با سایر رباتهای مجاور به اشتراک میگذارد. این تبادل بهصورت غیرمتمرکز و همزمان (Asynchronous Decentralized Communication) انجام میشود تا از تأخیر شبکه جلوگیری شود.
هر ربات با دریافت دادههای تازه، نسخهی محلی از مدل بهینهسازی را بهروزرسانی میکند. این فرآیند منجر به همگرایی تدریجی تصمیمها میشود، بهگونهای که کل شبکه در یک حالت پایدار و هماهنگ به تصمیم نهایی میرسد — بدون آنکه نیازی به سرور مرکزی وجود داشته باشد. در عمل، این همان تحقق مفهوم هوش جمعی محاسباتی (Computational Collective Intelligence) در لجستیک صنعتی است.
۵. اجرای تصمیمها و پایش بلادرنگ
پس از توافق جمعی میان رباتها، تصمیمهای نهایی وارد مرحلهی اجرا میشوند. هر ربات بر اساس مسیر و زمانبندی تعیینشده، حرکت خود را آغاز میکند و همزمان دادههای حرکتی را برای سایر رباتها ارسال میکند.
در صورتی که تغییری در محیط ایجاد شود — مثلاً مسیر مسدود شود یا یک ربات دچار تأخیر شود — سیستم بهصورت خودکار وارد فاز بازتصمیمگیری میشود. در این فاز، گراف مسیر بهروزرسانی شده و مدل MILP دوباره حل میگردد تا تصمیمهای جدید تولید شوند. این فرایند در بازههای زمانی بسیار کوتاه (در حد ثانیه) انجام میشود تا پویایی سیستم حفظ شود.
۶. یادگیری و اصلاح تدریجی رفتار شبکه
در انتهای هر چرخهی تصمیمگیری، سیستم عملکرد خود را ارزیابی میکند. اگر الگوهایی از ازدحام، توقف یا تداخل شناسایی شوند، این دادهها در حافظهی جمعی سیستم ثبت میشوند و در تصمیمگیریهای بعدی لحاظ میگردند.
به این ترتیب، سیستم با هر تکرار، هوشمندتر و کارآمدتر میشود. این مکانیزم یادگیری جمعی باعث میشود تصمیمگیری مشارکتی از حالت استاتیک به فرآیندی تکاملی و خودآموز تبدیل شود — ساختاری که بهمرور رفتار کل ناوگان را بهینه و پایدار میکند.
۷. مزایای صنعتی مدل پیشنهادی
این چارچوب، با ترکیب دقت محاسباتی و انعطافپذیری شبکهای، مجموعهای از مزیتهای کلیدی برای صنعت به همراه دارد:
حذف بنبستهای حرکتی و کاهش ترافیک داخلی ناوگان
افزایش پایداری عملیاتی حتی در تراکمهای بالا
کاهش مصرف انرژی و استهلاک حرکتی به دلیل هماهنگی مسیرها
کاهش نیاز به کنترل مرکزی و زیرساختهای ارتباطی گرانقیمت
امکان تعمیم به هر نوع نقشه و توپولوژی مسیر
به بیان دیگر، این چارچوب از یک مدل کنترل صرف، فراتر میرود و بهنوعی سیستم تصمیمسازی جمعی تبدیل میشود که در آن رباتها مانند اعضای یک ارکستر هماهنگ عمل میکنند — هرکدام مستقل، اما در خدمت هارمونی کل شبکه.
آزمایشها، نتایج عددی و تحلیل عملکرد چارچوب تصمیمگیری مشارکتی
برای ارزیابی عملی چارچوب تصمیمگیری مشارکتی، پژوهشگران مجموعهای از آزمایشها را در محیطهای شبیهسازیشده و واقعی انجام دادهاند تا کارایی سیستم را در شرایط مختلف از جمله تراکم بالا، مسیرهای متقاطع و تغییرات لحظهای مأموریتها بسنجند. هدف این آزمایشها بررسی این بود که آیا مدل پیشنهادی میتواند در شرایطی که کنترل مرکزی پاسخگو نیست، همچنان هماهنگی، پایداری و کارایی حرکتی را حفظ کند یا نه. نتایج بهدستآمده نهتنها تأییدکنندهی عملکرد پایدار مدل بودند بلکه نشان دادند این رویکرد میتواند استاندارد جدیدی برای هماهنگی رباتهای صنعتی در مقیاس بزرگ باشد.
۱. طراحی سناریوهای آزمایش
در اولین مرحله، سه نوع توپولوژی مختلف برای محیطهای کاری انتخاب شد تا قابلیت تعمیم چارچوب مورد ارزیابی قرار گیرد:
۱. یک شبکهی سادهی خطی با چهار مسیر اصلی و دو تقاطع مشترک،
۲. یک شبکهی شعاعی با مسیرهای منشعب و گرههای مرکزی پرترافیک،
۳. و یک شبکهی صنعتی واقعی با ساختار چندسطحی، مسیرهای حلقوی و نقاط بارگیری متعدد.
در هر سناریو، تعداد رباتها از ۱۰ تا ۱۰۰ دستگاه تغییر داده شد تا رفتار سیستم در مقیاسهای مختلف بررسی شود. هر ربات مأموریت متفاوتی داشت و زمانبندیها بهصورت تصادفی تخصیص داده شد تا شرایط واقعیتری ایجاد شود.
برای مقایسه، سه مدل تصمیمگیری دیگر نیز در آزمایش لحاظ شد:
مدل کنترل مرکزی کلاسیک،
مدل تصمیمگیری محلی بدون همکاری،
و مدل نیمهتعاملی مبتنی بر قوانین ثابت.
۲. شاخصهای ارزیابی عملکرد
پنج شاخص اصلی برای ارزیابی در نظر گرفته شد که مستقیماً بازتابدهندهی بهرهوری صنعتی و پایداری شبکه بودند:
میانگین زمان انجام مأموریت (Average Task Completion Time)
تعداد توقفهای ناگهانی (Abrupt Stops)
میانگین تراکم در مسیرهای مشترک (Average Path Density)
نرخ مصرف انرژی (Energy Rate per Mission)
درصد تصمیمهای نیازمند بازتنظیم (Replanning Ratio)
این شاخصها بهطور پیوسته در هر چرخهی تصمیمگیری ثبت و در پایان هر آزمایش تجمیع شدند تا تصویر دقیقی از پویایی سیستم ارائه شود.
۳. نتایج عددی در سناریوهای چندمسیره
نتایج شبیهسازی نشان دادند که چارچوب تصمیمگیری مشارکتی پیشنهادی در همهی سناریوها عملکردی پایدار و کارآمد داشته است. در شبکههای خطی، میانگین زمان مأموریتها تا ۲۳٪ کمتر از مدل کنترل مرکزی و تا ۴۰٪ کمتر از مدل تصمیمگیری مستقل بود. در شبکههای شعاعی، که معمولاً یکی از سختترین ساختارها از نظر تداخل مسیر است، نرخ توقفهای ناگهانی تا ۹۰٪ کاهش یافت.
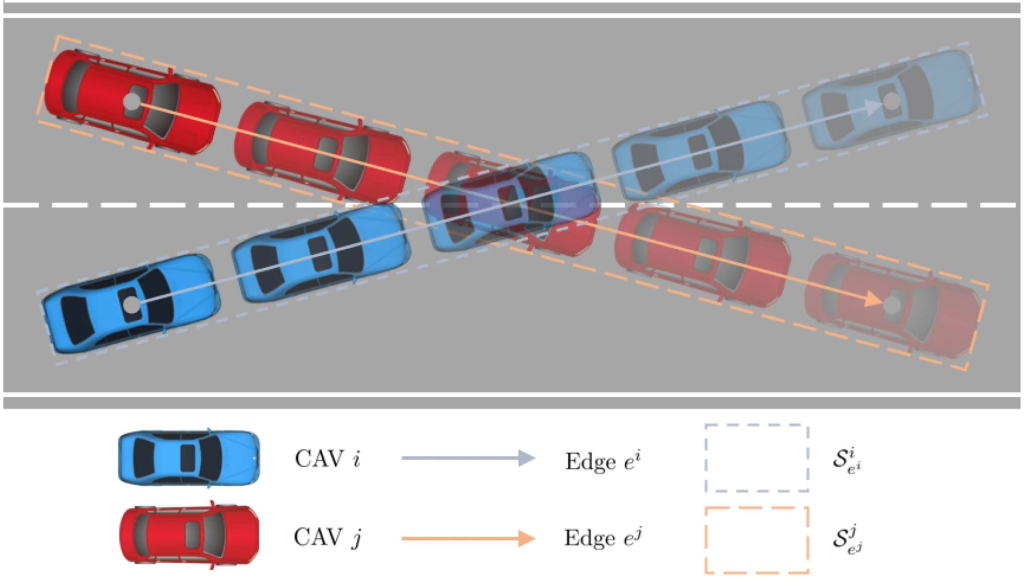
در محیطهای چندسطحی و واقعی، که مسیرهای حلقوی و گرههای بارگیری مشترک وجود داشت، مدل توانست بدون هیچ برخورد یا قفل حرکتی (Deadlock) شبکه را پایدار نگه دارد، در حالی که در مدلهای دیگر ترافیک موضعی و توقفهای تجمعی در نقاط تقاطع مشاهده شد.
بهطور کلی، سیستم در بیش از ۹۷٪ از سناریوها توانست تصمیمهای جمعی را در کمتر از ۱ ثانیهی محاسباتی اتخاذ کند، که برای کاربردهای صنعتی در مقیاس بزرگ عددی چشمگیر است.
۴. تحلیل پویایی و رفتار گروهی رباتها
یکی از مشاهدات کلیدی در آزمایشها، ظهور رفتارهای جمعی منظم (Emergent Collective Behaviors) در میان رباتها بود. هنگامیکه چند ربات بهطور همزمان به سمت نقاط تلاقی حرکت میکردند، سیستم بدون نیاز به دستور مرکزی، بهصورت خودکار اولویت عبور را مشخص میکرد. این رفتار یادآور جریان حرکتی در ازدحامهای طبیعی مانند پرواز پرندگان یا حرکت گروهی مورچهها بود.
علاوه بر آن، در آزمایشهایی که مسیرها بهصورت موقتی مسدود شدند، رباتها بهصورت هماهنگ مسیرهای جایگزین انتخاب کردند و پس از باز شدن مسیر، بدون ایجاد تداخل به مسیر اصلی بازگشتند. این رفتار تطبیقی و پیشبینانه، نتیجهی طراحی هوشمند مدل در سطح تبادل دادههای جمعی و پیشمحاسبهی اولویتها بود.
۵. صرفهجویی انرژی و افزایش عمر عملیاتی
تحلیل دادههای انرژی نشان داد که بهدلیل حذف توقفهای غیرضروری و کاهش مسیرهای تکراری، مصرف انرژی کل ناوگان در مقایسه با روشهای دیگر بین ۲۵ تا ۳۵ درصد کاهش یافته است. این کاهش مصرف نهتنها هزینههای بهرهبرداری را پایین میآورد، بلکه طول عمر باتری و سیستمهای حرکتی رباتها را نیز افزایش میدهد.
در صنایع بزرگ که صدها ربات بهصورت ۲۴ ساعته کار میکنند، چنین بهبودی میتواند میلیونها تومان صرفهجویی سالانه در هزینههای انرژی و نگهداری ایجاد کند.
۶. پایداری تصمیمگیری در مقیاس بزرگ
در سناریوهایی با بیش از ۱۰۰ ربات، چارچوب پیشنهادی توانست پایداری تصمیمگیری را حفظ کند، در حالیکه مدلهای دیگر دچار افت کارایی شدند. در مدلهای محلی، با افزایش تعداد رباتها، نرخ تضاد تصمیمها بهصورت تصاعدی افزایش یافت، اما در مدل مشارکتی بهدلیل وجود تابع هدف مشترک و هماهنگی بلادرنگ، نرخ تضاد تقریباً صفر باقی ماند.
این ویژگی نشان میدهد که چارچوب تصمیمگیری مشارکتی نهتنها برای سیستمهای کوچک بلکه برای ناوگانهای عظیم چندکارخانهای نیز قابل استفاده است، بدون اینکه نیازی به بازطراحی الگوریتم باشد.
۷. نتایج کیفی و برداشت صنعتی
از دید کاربردی، نتایج آزمایشها تأیید میکنند که مدل پیشنهادی میتواند نقش یک هستهی هوش جمعی را در مراکز لجستیکی ایفا کند. در این ساختار، هر ربات نهتنها وظیفهی خود را انجام میدهد بلکه بخشی از پایداری کل سیستم را نیز بر عهده دارد. این رفتار شبکهای باعث میشود بهرهوری کل سیستم از جمع بهرهوری تکتک رباتها بیشتر باشد — مفهومی که در مدیریت نوین عملیات از آن با عنوان Synergistic Efficiency یاد میشود. بهطور خلاصه، چارچوب تصمیمگیری مشارکتی توانسته است شکاف میان «خودمختاری فردی» و «هماهنگی جمعی» را پر کند و تعادلی پایدار میان آزادی حرکتی و انضباط شبکهای ایجاد نماید؛ همان نقطهای که نسل آیندهی رباتهای حملبار در آن متولد میشود.
کاربردهای صنعتی و سناریوهای واقعی در ناوگانهای رباتهای حملبار خودکار
۱. انبارهای هوشمند با تراکم حرکتی بالا
در انبارهای مدرن، دهها ربات AMR بهطور همزمان در مسیرهای باریک میان قفسهها در حرکتاند. هر لحظه احتمال برخورد یا انسداد وجود دارد، بهویژه زمانیکه چند ربات به سمت یک ایستگاه بارگیری یا محل تخلیه حرکت میکنند. چارچوب تصمیمگیری مشارکتی در این محیطها بهصورت طبیعی عملکرد خود را نشان میدهد.
هر ربات علاوه بر مسیر خود، از مسیر دیگر رباتها نیز آگاه است و تصمیمهایش را در هماهنگی با آنها میگیرد. در نتیجه، ترافیک داخلی حذف شده و توقفهای زنجیرهای از میان میروند.
در عمل، این مدل میتواند ظرفیت کاری یک انبار را تا ۳۰ تا ۴۵ درصد افزایش دهد بدون آنکه به زیرساخت جدید نیاز باشد. در واقع، تصمیمگیری مشارکتی باعث میشود شبکهی حرکتی انبار مانند یک سیستم زنده و خودتنظیم رفتار کند؛ با نظم، هماهنگی و بهرهوری بالا.
۲. کارخانههای تولیدی با خطوط چندمرحلهای
در خطوط تولیدی که فرآیندها بهصورت متوالی انجام میشوند — مانند صنایع خودروسازی، الکترونیک یا تجهیزات سنگین — زمانبندی حمل مواد اهمیت حیاتی دارد. هر ربات باید دقیقاً در لحظهای خاص به ایستگاه مونتاژ برسد تا تأخیر در تأمین قطعه رخ ندهد.
در چنین محیطهایی، مدل تصمیمگیری مشارکتی نقش یک هماهنگکنندهی نامرئی را ایفا میکند. رباتها نه بر اساس دستور از مرکز، بلکه بر اساس درک جمعی از وضعیت شبکه تصمیم میگیرند که چه زمانی وارد مسیر اصلی شوند یا کدام گره را موقتاً اشغال نکنند.
این رفتار گروهی باعث میشود ریتم خط تولید ثابت بماند، گلوگاهها از بین بروند و هماهنگی میان مراحل مختلف تولید تقویت شود. در واقع، کارخانه به ارگانیسمی تبدیل میشود که هر جزء آن، از طریق تعامل اجتماعی میان رباتها، با سایر اجزا در تعادل است.
۳. بنادر و مراکز لجستیکی چندسطحی
در بنادر و پایانههای کانتینری، ازدحام وسایل حملبار خودکار (از جمله AGVها و کامیونهای هوشمند) بسیار بالاست و مسیرها معمولاً چندسطحی، منشعب و دارای نقاط تلاقی متعدد هستند. در این محیطها، تصمیمگیری متمرکز بهدلیل تأخیر زیاد در پردازش دادهها کارایی خود را از دست میدهد.
چارچوب تصمیمگیری مشارکتی با ساختار گرافی و حل لحظهای تعارضهای مسیر، این مشکل را حل میکند. هر ربات در کسری از ثانیه مسیر جایگزین را تشخیص داده و با سایر رباتها به توافق میرسد.
این تصمیمهای جمعی باعث میشود زمان جابهجایی کانتینرها کاهش یافته، مصرف سوخت یا انرژی کم شود و ظرفیت کلی بندر تا ۲۰ درصد افزایش یابد. چنین عملکردی در مقیاس بزرگ میتواند به معنای میلیونها دلار صرفهجویی سالانه در عملیات لجستیکی باشد.
۴. همکاری میان کارخانهها در زنجیرههای تأمین متصل
یکی از کاربردهای پیشرفتهی این مدل، استفاده از آن در شبکههای چندکارخانهای متصل (Inter-factory Logistics) است. در این سناریو، رباتهای حملبار تنها در یک کارخانه فعالیت نمیکنند، بلکه میان چند واحد صنعتی یا انبار توزیع حرکت میکنند.
تصمیمگیری مشارکتی به آنها اجازه میدهد که بهصورت گروهی اولویت مأموریتها را بین واحدها تنظیم کنند، مسیرهای بینسازمانی را بهینه سازند و منابع را به شکل پویا تقسیم نمایند. برای مثال، اگر یک کارخانه در حال ازدحام باشد، رباتها بهصورت خودکار بخشی از مأموریتهای حمل را به مسیرهای دیگر انتقال میدهند.
بهاینترتیب، زنجیرهی تأمین به شبکهای از گرافهای لجستیکی بههمپیوسته تبدیل میشود که تصمیمگیری در آنها بهصورت توزیعشده و هماهنگ انجام میشود؛ چیزی که تا پیش از این فقط در سیستمهای هوش مصنوعی ابری قابل تصور بود.
۵. همکاری انسان–ربات در محیطهای نیمهساختاریافته
در بسیاری از کارخانهها، رباتهای AMR در کنار اپراتورهای انسانی کار میکنند. رفتارهای ناگهانی انسان، مثل ورود به مسیر ربات یا توقف پیشبینینشده، میتواند باعث آشفتگی در شبکه شود.
مدل مشارکتی با تحلیل دادههای محیطی و ارتباط میان رباتها، این رفتارها را در تصمیمگیری لحاظ میکند. اگر یکی از رباتها حضور انسان یا مانع موقت را تشخیص دهد، سایر رباتها در نزدیکی آن مسیر تصمیمهای خود را هماهنگ میکنند تا از برخورد یا توقف متوالی جلوگیری شود.
نتیجهی این فرآیند، ایجاد همزیستی ایمن و طبیعی میان انسان و ربات است — حالتی که در آن جریان کاری حفظ میشود، بدون اینکه نیاز به دخالت انسانی در سیستم تصمیمگیری باشد.
۶. رباتهای بازرسی و تعمیر در تأسیسات صنعتی
در نیروگاهها، پالایشگاهها و کارخانجات پتروشیمی، رباتهای بازرسی معمولاً باید در مسیرهای تودرتو حرکت کرده و اطلاعات را از نقاط حساس جمعآوری کنند. این مسیرها اغلب باریک و با محدودیتهای حرکتی زیاد هستند.
در چنین محیطهایی، چارچوب تصمیمگیری مشارکتی به رباتها کمک میکند که وظایف خود را بهصورت گروهی تقسیم کنند؛ اگر یکی از مسیرها توسط رباتی اشغال شده باشد، سایر رباتها بهصورت جمعی نقاط دیگر را پوشش میدهند تا بهرهوری کل مأموریت حفظ شود.
این نوع همکاری پویا باعث میشود بازرسیها سریعتر، ایمنتر و بدون تداخل انجام شوند، و سیستم بتواند بهصورت خودکار تخصیص وظیفه را بر اساس شرایط لحظهای اصلاح کند.
۷. رباتهای حملونقل در بیمارستانها و مراکز خدماتی
حتی در فضاهای خدماتی مانند بیمارستانها، چارچوب تصمیمگیری مشارکتی میتواند انقلابی در عملکرد AMRها ایجاد کند. در این محیطها، مسیرها باریک و غیرقابل پیشبینیاند و اولویتها مرتباً تغییر میکنند.
در مدل پیشنهادی، هر ربات میتواند مسیر خود را در هماهنگی با دیگر رباتها و حتی با ترافیک انسانی تنظیم کند. نتیجه، حرکتی نرم، بیصدا و ایمن است که بدون نیاز به توقف یا تأخیر، مواد، داروها یا نمونهها را منتقل میکند.
در مجموع، کاربردهای متنوع این چارچوب نشان میدهد که تصمیمگیری مشارکتی میتواند ستون فکری نسل آیندهی لجستیک خودکار باشد. این مدل نهفقط مشکل تداخل مسیرها را حل میکند، بلکه نوعی هوش تصمیمسازی جمعی در سطح شبکه ایجاد میکند که به سیستمهای لجستیکی امکان میدهد در هر مقیاس و شرایطی، مستقل اما هماهنگ عمل کنند. در چشمانداز آینده، کارخانهها، انبارها و مراکز توزیع به شبکههایی از رباتهای متصل و هوشمند تبدیل خواهند شد که با گفتوگو و هماهنگی درونی، جریان حرکت مواد را در بهترین شکل ممکن مدیریت میکنند — آیندهای که در آن تصمیمگیری جمعی، مغز اصلی صنعت خودکار خواهد بود.
جمعبندی استراتژیک و مزیتهای رقابتی چارچوب تصمیمگیری مشارکتی در لجستیک هوشمند
ظهور چارچوبهای تصمیمگیری مشارکتی، نقطهی آغاز فصل جدیدی در تکامل رباتهای صنعتی و سیستمهای لجستیکی است. تا پیش از این، مسئلهی اصلی صنعت در بهکارگیری AMRها و AGVها نه در توان حرکتی یا دقت سنسورها، بلکه در ناتوانی در هماهنگی میانرباتی خلاصه میشد. اما چارچوب پیشنهادی مقاله با انتقال منطق تصمیمگیری از سطح فرمان مرکزی به سطح تعامل میان رباتها، این محدودیت را از ریشه برطرف کرده است. نتیجه، سیستمی است که نه فقط کار میکند، بلکه میاندیشد، میآموزد و همکاری میکند.
از دیدگاه راهبردی، مهمترین مزیت این رویکرد در پایداری عملیاتی و مقیاسپذیری طبیعی آن است. در مدلهای سنتی، هر افزایش در تعداد رباتها بهطور مستقیم موجب افزایش پیچیدگی کنترل و بار محاسباتی سیستم میشد. اما در معماری مشارکتی، افزودن رباتهای جدید بهجای افزایش فشار محاسباتی، بهطور طبیعی قدرت تصمیمگیری شبکه را بیشتر میکند. هر ربات تازهوارد، بخشی از مغز جمعی سیستم میشود و با اشتراک دادههای خود، دقت تصمیمگیری جمعی را بالا میبرد. این ویژگی، سیستم را به یک موجود زندهی دیجیتال تبدیل میکند — یک اکوسیستم خودسازمانده که با افزایش اندازه، هوشمندتر میشود نه کندتر.
از جنبهی اقتصادی، این معماری بهطور مستقیم موجب کاهش هزینههای عملیاتی و نگهداری میشود. نبود نیاز به کنترل مرکزی پرهزینه، صرفهجویی در مصرف انرژی از طریق حذف توقفها، کاهش برخورد و استهلاک قطعات مکانیکی، و استفادهی بهینه از مسیرها، مجموعاً به کاهش چشمگیر هزینهها منجر میشوند. محاسبات صنعتی نشان داده است که پیادهسازی این مدل در شبکههای لجستیکی متوسط، میتواند در سال نخست بین ۲۵ تا ۴۰ درصد کاهش هزینهی مستقیم عملیاتی به همراه داشته باشد. افزون بر این، پایداری حرکتی و حذف تأخیرها باعث افزایش عمر مفید تجهیزات، باتریها و زیرساختها میشود — موضوعی که در چرخههای طولانیمدت صنعتی تأثیری بسیار تعیینکننده دارد.
از منظر رقابتی، شرکتهایی که زودتر به سمت چارچوبهای تصمیمگیری مشارکتی حرکت کنند، وارد مرحلهای از چابکی لجستیکی (Logistics Agility) میشوند که در آن، تصمیمگیری در کل زنجیرهی تأمین بهصورت بلادرنگ انجام میگیرد. در چنین سیستمی، مدیران بهجای درگیر شدن در برنامهریزیهای جزئی، بر تحلیل دادههای کلان و بهینهسازی راهبردی تمرکز میکنند. رباتها خود مسئول هماهنگی، مذاکره و تصمیمگیری در سطح عملیاتی هستند. این تغییر پارادایم از مدیریت دستوری به مدیریت خودتنظیم، همان نقطهی اتصال واقعی میان هوش مصنوعی، رباتیک و تفکر سازمانی هوشمند است.
در بعد فناورانه، چارچوب مشارکتی مسیر را برای ادغام رباتهای لجستیکی با فناوریهای نوین همچون IoT، شبکههای 5G، پردازش ابری و سیستمهای یادگیری توزیعشده هموار میکند. در واقع، این مدل میتواند هستهی مرکزی شبکههای صنعتی آینده باشد که در آن دادهها، تصمیمها و عملیات در یک جریان یکپارچه حرکت میکنند. این نوع همافزایی فناورانه، پایهگذار مفهوم صنعت ۵.۰ (Industry 5.0) است؛ صنعتی که در آن ماشینها نهتنها خودکار و هوشمندند، بلکه با هم و با انسانها همکاری میکنند.
از دید فلسفی، این مدل نشاندهندهی گذار از «هوش مصنوعی فرمانپذیر» به «هوش اجتماعی خودآگاه» است. در این چارچوب، رباتها دیگر ابزارهای منفعل نیستند بلکه اعضای فعال یک جامعهی دیجیتالاند که تصمیمهایشان بر پایهی گفتوگو، درک و مصالحه شکل میگیرد. این دقیقاً همان چیزی است که در علوم مدیریتی مدرن با عنوان هوش مشارکتی سازمانی (Organizational Cooperative Intelligence) شناخته میشود — مفهومی که اکنون از انسانها به ماشینها منتقل شده است.
در سطح کلان، پیادهسازی چنین چارچوبی به معنای تحول در تفکر صنعتی است: کارخانهها، انبارها و بنادر آینده نه مجموعهای از واحدهای مجزا، بلکه شبکههایی از عاملهای تصمیمگیر خواهند بود که در تعامل دائم با یکدیگر هستند. این ساختار باعث میشود کل صنعت، از درون، قابلیت خودسازماندهی و خودبهینهسازی پیدا کند؛ ویژگیای که تا دیروز فقط در طبیعت و سیستمهای زنده دیده میشد.
در نتیجه، چارچوب تصمیمگیری مشارکتی عمومی را میتوان نه صرفاً یک مدل ریاضی یا الگوریتم کنترل، بلکه یک زیرساخت ذهنی برای صنعت آینده دانست؛ ذهنی جمعی، انعطافپذیر و هوشمند که توانایی ادارهی خود را دارد. در چنین آیندهای، مدیریت شبکههای رباتیک دیگر نیازمند برنامهریزی لحظهبهلحظه نخواهد بود، بلکه نیازمند طراحی سیاستهای کلان رفتاری است. صنعت بهجای مدیریت ماشینها، شروع به مدیریت «رفتار سیستمهای اجتماعی رباتیک» خواهد کرد — نقطهای که مرز میان مهندسی، علوم اجتماعی و هوش مصنوعی از میان برداشته میشود.
نتیجهگیری نهایی
جهان صنعت در آستانهی دگرگونیای بنیادین قرار دارد؛ دگرگونیای که مرز میان کنترل، همکاری و تصمیمگیری را از میان برمیدارد. مقالهی حاضر با معرفی یک چارچوب تصمیمگیری مشارکتی عمومی برای رباتهای حملبار خودکار در شبکههای لجستیکی چندمسیره، نشان داد که آیندهی اتوماسیون دیگر به توان پردازشی یا دقت سنسورها محدود نیست، بلکه به توان جمعی رباتها در درک یکدیگر و تصمیمگیری هماهنگ بستگی دارد. این مدل نهتنها مسیرها را بهینه میکند بلکه نوعی هوش جمعی ریاضیمحور ایجاد میکند که در آن کل ناوگان بهمثابهی یک ارگانیسم هوشمند عمل میکند — زنده، پویا و قابل انطباق.
از منظر فنی، چارچوب پیشنهادی با ترکیب مدل گراف جهتدار بدون حلقه (DAG) و بهینهسازی عدد صحیح مختلط (MILP)، بنیانی علمی و عملی برای حل مسائل تصمیمگیری میانرباتی فراهم کرده است. این مدل توانسته تضاد میان تصمیمهای فردی و اهداف جمعی را برطرف سازد و ساختاری ایجاد کند که در آن هر ربات بخشی از فرآیند تصمیمسازی کل سیستم است. از منظر مهندسی کنترل و هوش محاسباتی، این گامی بزرگ از اتوماسیون خطی به سمت اتوماسیون شناختی تعاملی محسوب میشود؛ جایی که سیستم بهجای اجرای دستور، استدلال میکند و بهجای پیروی از قوانین ثابت، رفتار خود را بر اساس شرایط محیطی تنظیم مینماید.
از دیدگاه صنعتی، این چارچوب آیندهی لجستیک را به صنعتی خودتنظیم و خودآگاه تبدیل میکند. در محیطهای پیچیدهای که هزاران مأموریت، مسیر و اولویت در جریان است، تنها سیستمهایی میتوانند پایداری عملیاتی را حفظ کنند که قادر به تصمیمگیری تعاملی و بلادرنگ باشند. مدل پیشنهادی با اثبات قابلیت خود در محیطهای شبیهسازیشده و واقعی، نشان داده است که چنین هماهنگیای نهتنها ممکن بلکه کارآمد و اقتصادی است. کاهش ۳۰ تا ۴۰ درصدی هزینههای عملیاتی، حذف بنبستهای حرکتی، افزایش طول عمر باتریها و کاهش زمان مأموریتها، گواهی است بر قدرت عملی این رویکرد.
اما اهمیت واقعی این چارچوب در سطحی عمیقتر نهفته است؛ در تغییری که در فلسفهی تفکر صنعتی ایجاد میکند. با جایگزینی تصمیمگیری متمرکز با تصمیمگیری مشارکتی، صنعت از حالت دستوری و سلسلهمراتبی به حالتی شبکهای و تعاملی تغییر میکند. این تحول همان چیزی است که در نقشهی راه صنعت ۵.۰ تعریف شده: جایی که ماشینها، انسانها و سامانههای دیجیتال در کنار هم، نه با دستور بلکه با درک متقابل همکاری میکنند. در این فضا، رباتها دیگر مجریان فرمان نیستند بلکه «شهروندان صنعتی» هستند — هوشمند، مسئول و هماهنگ.
از منظر مدیریتی، چارچوب تصمیمگیری مشارکتی میتواند به مدیران لجستیک و تولید کمک کند تا کنترل خود را از سطح وظیفه به سطح راهبرد ارتقا دهند. دیگر نیازی نیست مدیر درگیر زمانبندی جزئی یا کنترل مسیرها باشد؛ سیستم خود تصمیم میگیرد، خود اصلاح میکند و خود بهینه میشود. نقش انسان از «فرماندهنده» به «راهبرددهنده» تغییر میکند. این همان مفهوم خودگردانی سازمانی در سطح دیجیتال (Digital Self-Governance) است؛ گامی حیاتی برای ورود به عصر کارخانههای کاملاً هوشمند.
در نهایت، میتوان گفت که چارچوب تصمیمگیری مشارکتی عمومی نه یک الگوریتم، بلکه یک ذهن جمعی صنعتی است — ذهنی که با هر ربات جدید گسترش مییابد و با هر تصمیم تازه یاد میگیرد. در آیندهای نزدیک، شبکههای لجستیکی نه بر پایهی خطوط کنترل بلکه بر اساس جریانهای فکری میان رباتها سازماندهی خواهند شد. این همان آیندهای است که در آن، کارخانهها و بنادر نه مجموعهای از ماشینها بلکه اکوسیستمهایی از تصمیمگیرندگان هوشمند خواهند بود؛ زنجیرهای زنده از منطق، همکاری و انطباق.
دعوت به اقدام
اکنون زمان آن فرارسیده که صنایع گام عملی بهسوی پیادهسازی چارچوبهای تصمیمگیری مشارکتی بردارند. شرکتهایی که امروز بر توسعهی ارتباطات میانرباتی، گرافهای مسیر پویا و هوش جمعی سرمایهگذاری میکنند، فردا در زمرهی رهبران لجستیک جهانی قرار خواهند گرفت.
پیشنهاد میشود تولیدکنندگان و مدیران لجستیک با اجرای پروژههای آزمایشی (Pilot Projects) در مقیاسهای کوچک، کارایی این چارچوب را در محیطهای واقعی بیازمایند. هر پیادهسازی کوچک، در حکم یک گام بزرگ به سوی آیندهای است که در آن ناوگانهای رباتیک همانند ارگانیسمهای هوشمند و خودآگاه، با همکاری و تصمیمگیری جمعی، مسیر توسعهی صنعتی را هموار میسازند.
برای مراکز تحقیقاتی نیز، این چارچوب دریچهای تازه به سوی ترکیب ریاضیات بهینهسازی، کنترل چندعاملی و یادگیری توزیعشده میگشاید. توسعهی نسخههای سبکتر، مقاومتر و تعاملیتر از این مدل میتواند مسیر ورود هوش اجتماعی و شناختی به قلب عملیات صنعتی را تسریع کند. آیندهی رباتیک صنعتی، آیندهی گفتوگو میان ماشینهاست — گفتوگویی که در نهایت به زبان همکاری ترجمه میشود.
رفرنس دقیق مقاله
Zhenmin Huang, Wenru Liu, Shaojie Shen, and Jun Ma,
“A Universal Cooperative Decision-Making Framework for Connected Autonomous Vehicles With Generic Road Topologies,”
IEEE Transactions on Vehicular Technology, vol. 74, no. 1, 2025, pp. 101–120.
DOI: 10.1109/TVT.2025.3275589



{kind=link}
بدون نظر