

رباتهای متحرک خودران (AMR) سالهاست که وارد خطوط تولید، انبارها و محیطهای لجستیکی شدهاند، اما با گسترش نیازها، دیگر قرار نیست فقط در مسیرهای از پیشتعریفشده و فضای کنترلشده حرکت کنند. واقعیت این است که در بسیاری از محیطهای عملیاتی امروز، از کارخانههای پویا تا فضاهای عمومی، رباتها باید در کنار انسانها و سایر ماشینها، بهصورت هوشمند و بدون دخالت انسانی حرکت کنند.
اما نکته مهم اینجاست: در دنیای واقعی، هیچچیز ساکن نیست. مسیر همیشه آزاد نیست. موانع فقط ثابت نیستند. ممکنه یه کارگر وارد مسیر بشه، دوچرخهای از تقاطع عبور کنه یا وسیلهای از راه برسد که قبلاً وجود نداشته. این یعنی اگر ربات فقط بر اساس اطلاعات لحظهای و نقشههای ایستا تصمیم بگیره، دیر یا زود با مانع برخورد میکنه، مسیرش قطع میشه یا توقف غیرضروری ایجاد میکنه.
کلید حل این مشکل، ناوبری تطبیقیه: سیستمی که نهفقط محیط رو درک کنه، بلکه بتونه حرکت اجزای زندهی اون رو پیشبینی کنه، و براساس این پیشبینیها تصمیم بگیره. یعنی یک AMR مدرن باید بدونه که مانع متحرک قراره به کدوم سمت حرکت کنه، کی به نقطه برخورد میرسه، و آیا میشه مسیر رو ادامه داد یا باید واکنش نشون داد. این چیزی فراتر از ادراک صرفه — این یعنی «فهم آیندهی نزدیک».
مقالهای که در این بلاگ بررسی میکنیم، دقیقاً همین نیاز رو هدف گرفته و یک چارچوب ناوبری تطبیقی طراحی کرده که میتونه در محیطهای پویا، متراکم، و چندعاملی کار کنه. این چارچوب:
از YOLOv8 برای تشخیص بلادرنگ اشیای متحرک (آدم، ماشین، دوچرخه و …) استفاده میکنه،
با استفاده از دوربین RGBD و سنسور LiDAR، موقعیت و عمق اشیا رو ثبت میکنه،
با الگوریتمی ساده اما کارآمد، مسیر آیندهی موانع متحرک رو پیشبینی میکنه،
و برای تصمیمگیری، از ترکیب A* (برای مسیریابی کلی) و APF (برای واکنش محلی و اجتناب لحظهای) استفاده میکنه.
همهی این ماژولها روی بستر ROS2 توسعه داده شدن، یعنی میتونن بهصورت ماژولار، منعطف و در سطح صنعتی، در یک سیستم واقعی پیادهسازی بشن. در محیط شبیهسازی Gazebo، این مدل با سناریوهایی شامل آدم در حال حرکت، چراغ راهنما، وسایل نقلیه عبوری و توقف ناگهانی، تست شده و نشون داده که AMR میتونه بدون برخورد، با توقف کم، و با حفظ مسیر بهینه حرکت کنه.
در ادامه این بلاگ، مرحلهبهمرحله وارد جزئیات فنی سیستم میشیم. از چالشهایی که این مدل حل میکنه، تا تحلیل الگوریتمها، ساختار ماژولها، و حتی پیشنهاداتی برای پیادهسازی در پروژههای بومیسازیشده در ایران. هدف ما نهفقط بررسی یک مقاله، بلکه ارائه یک مسیر عملیاتی برای ساخت رباتهاییست که واقعاً بتونن در محیطهای زنده تصمیم بگیرن و حرکت کنن.
چالشهای ناوبری در محیطهای پویا برای رباتهای AMR
اگر قرار باشد رباتهای متحرک خودران (AMR) در محیطهای صنعتی، شهری یا خدماتی واقعی حضور مؤثر داشته باشند، نمیتوان از آنها انتظار داشت صرفاً با نقشهای از پیش تعیینشده یا با تصمیمهای ایستا عمل کنند. محیط واقعی زنده است؛ پویایی دارد، پیشبینیناپذیر است، و دائماً در حال تغییر است. این یعنی ناوبری در چنین محیطی، با چالشهایی اساسی روبهروست که اگر حل نشوند، نهتنها بهرهوری کاهش مییابد، بلکه ایمنی و اعتماد به سیستم هم زیر سؤال میرود. در این بخش، به مهمترین این چالشها میپردازیم:
۱. چالش موانع متحرک با رفتار غیرخطی و غیرقابلپیشبینی
در محیطهای واقعی، برخلاف محیطهای ایستا یا از پیشنقشهبرداریشده، رباتهای AMR با اشیایی مواجه هستند که هم متحرکاند و هم رفتار مشخصی ندارند. عابری که وارد میدان دید میشود، ممکن است مسیر خود را ناگهانی تغییر دهد؛ یک دوچرخهسوار ممکن است ترمز بگیرد، شتاب بگیرد یا حتی به سمت مخالف بپیچد. برخلاف موانع ایستا، در اینجا نهفقط موقعیت فعلی مانع اهمیت دارد، بلکه روند حرکتی آیندهی آن نیز حیاتی است. اگر ربات فقط به اطلاعات لحظهای واکنش نشان دهد، تصمیمات آن یا بیش از حد محافظهکارانه خواهد بود (توقفهای پیدرپی و غیرضروری) یا دیرهنگام و خطرآفرین (واکنش پس از نزدیکشدن به مانع). بنابراین، پیشبینی مسیر آیندهی مانع نه یک قابلیت اضافه، بلکه یک الزام ایمنی و کارکردی است. بدون آن، ناوبری در محیطهای واقعی امکانپذیر نیست.
۲. محدودیت زمانی برای واکنش و تصمیمگیری بلادرنگ
زمان، عامل کلیدی در ناوبری تطبیقی است. هنگامی که یک مانع متحرک وارد مسیر میشود، ربات فرصت چندانی برای فکر کردن ندارد. در یک انبار، ممکن است یک لیفتراک از راه برسد. در تقاطع شهری، ممکن است چراغ راهنما تغییر کند و خودروهایی از مقابل حرکت کنند. در چنین شرایطی، ربات باید ظرف کسری از ثانیه تشخیص دهد که مانع چیست، به چه سمت در حال حرکت است، آیا تداخل با مسیر دارد یا نه، و سپس تصمیم بگیرد بایستد، ادامه دهد یا مسیر را تغییر دهد. این تصمیمگیری بلادرنگ نیازمند یک معماری سریع، سبک و هوشمند است که بتواند هم دادههای حسگر را بهسرعت پردازش کند و هم واکنش حرکتی مناسب تولید کند. اگر تأخیر پردازش از آستانهی مشخصی بیشتر شود، ربات عملاً در زمان گذشته تصمیم میگیرد و این یعنی افت ایمنی و کارایی.
۳. ناپایداری دادههای سنسور در شرایط واقعی
در محیطهای عملیاتی، هیچ حسگری ایدهآل نیست. دادههای LiDAR ممکن است در حضور غبار یا انعکاس نوری دچار خطا شوند. دوربین RGB ممکن است در نور کم یا وجود موانع بینابینی بخشی از تصویر را از دست بدهد. حتی دادههای عمق از RGB-D ممکن است با نویز همراه باشند یا فریمهایی حذف شود. در چنین شرایطی، سیستم ناوبری باید بتواند با دادههای ناقص تصمیم بگیرد و تخمین موقعیت و سرعت موانع را حتی با دادههای نویزی و غیرکامل انجام دهد. این یعنی الگوریتم باید نهفقط «چه دیده میشود» را بررسی کند، بلکه «چقدر به دیدن آن اطمینان داریم» را هم وارد مدل کند. وجود لایهای برای تحلیل عدمقطعیت، و فیلترهایی که بتوانند دادههای ناقص را با وزندهی دینامیک وارد تصمیمگیری کنند، کلید حفظ پایداری عملکرد در شرایط واقعی است.
۴. ادغام بلادرنگ دادههای ناهمگون از چند سنسور
معماریهای پیشرفته ناوبری باید بتوانند اطلاعاتی متنوع و ناهمگون از سنسورهای مختلف را در یک سیستم منسجم ادغام کنند. این اطلاعات شامل تصویر RGB از دوربین، ابر نقاط سهبعدی از LiDAR، داده عمق از RGB-D، و گاهی داده موقعیت از GPS یا odometry است. هرکدام از این منابع، نرخ نمونهبرداری، قالب داده و تأخیر خاص خود را دارند. برای تصمیمگیری بلادرنگ، باید همه این دادهها بهطور دقیق همگامسازی شده و در یک لحظه تحلیلی مورد استفاده قرار گیرند. عدم همترازی زمانی بین سنسورها میتواند باعث شود ربات دادهای را پردازش کند که مربوط به گذشته است، یا بهاشتباه، مانعی را در موقعیت نادرستی شناسایی کند. بنابراین، نیاز به یک لایه فیوژن قوی با مدیریت دقیق زمانبندی، کلید عملکرد قابلاعتماد در محیطهای ترکیبی و چندمنظوره است.
۵. تعادل بین پیروی از مسیر اصلی و اجتناب از مانع
رباتهای AMR برای انجام مأموریت خود باید به مقصد برسند، اما این به معنای حرکت مستقیم و بدون انحراف نیست. در مسیر، ممکن است موانعی پدیدار شوند که اجتناب از آنها ضروری باشد. چالش اینجاست که سیستم ناوبری باید بتواند بین «مسیریابی بهینه» و «اجتناب لحظهای از مانع» تعادل برقرار کند. اگر الگوریتم فقط واکنشی باشد، هر مانع باعث انحراف و بازطراحی کامل مسیر میشود که منجر به تأخیر و مصرف انرژی بیشتر میشود. اگر هم بیش از حد روی مسیر اصلی پافشاری شود، احتمال برخورد افزایش مییابد. بنابراین، نیاز به یک معماری ترکیبی است؛ مانند همان چیزی که در مقاله مطرح شده: ترکیب A* برای هدفمندی کلی و APF برای واکنش محلی. این مدلهای ترکیبی، ربات را قادر میسازند که در عین حفظ هدف، انعطافپذیر با رویدادهای آنی برخورد کند — درست مثل یک راننده ماهر.
نوآوریها و نقطه تمایز سیستم پیشنهادی مقاله
در حوزه ناوبری رباتهای خودران، الگوریتمها و معماریهای مختلفی معرفی شدهاند؛ از سیستمهای مبتنی بر نقشههای ایستا و تصمیمگیریهای از پیش برنامهریزیشده، تا معماریهای واکنشی که تنها بر مبنای فاصله آنی از موانع، رفتار حرکتی را تنظیم میکنند. اما مشکل مشترک اغلب آنها این است که در مواجهه با محیطهای واقعی، پویا، و چندعاملی، عملکردشان یا بیش از حد محافظهکارانه است، یا فاقد واکنش بهموقع در برابر رویدادهای غیرمنتظره.
مدلی که در این مقاله ارائه شده، چند نوآوری کلیدی دارد که آن را از معماریهای پیشین متمایز میکند و برای استقرار در محیطهای پیچیده، متراکم و پویای صنعتی مناسب میسازد. در ادامه، این نوآوریها را بهصورت دقیق تحلیل میکنیم:
۱. پیشبینی مسیر موانع متحرک؛ از واکنش صرف به تصمیمگیری آیندهنگر
یکی از ضعفهای رایج در سامانههای ناوبری رباتهای AMR، اینه که در مقابل موانع متحرک، فقط بر اساس فاصله فعلی یا شناسایی لحظهای تصمیمگیری میکنن. یعنی تا وقتی مانع وارد منطقهی خطر نشه، ربات واکنشی نشون نمیده. این رویکرد برای محیطهای ثابت یا با تراکم کم قابلتحمله، اما در محیطهای زنده مثل انبارهای بزرگ، خیابانها یا بیمارستانها، نتیجهای جز تأخیر، برخورد یا توقفهای مکرر نداره.
اما سیستم پیشنهادی مقاله، با طراحی یک ماژول مجزا برای پیشبینی مسیر آیندهی موانع متحرک، این محدودیت رو بهطور جدی برطرف میکنه. در این مدل، بعد از شناسایی یک مانع، الگوریتم بردار سرعت و جهت حرکت اون رو محاسبه میکنه و بر مبنای آن، پیشبینی میکنه که در چند ثانیه آینده مانع در کجا قرار خواهد گرفت. این پیشبینی، ورودی اصلی تصمیمگیری ربات برای انتخاب مسیر یا توقف خواهد بود.
نتیجه اینه که ربات دیگه فقط “واکنشدهنده” نیست، بلکه مثل یک سیستم هوشمند میتونه حرکت بعدی موانع رو پیشبینی کنه و بهموقع مانور بده، طوری که هم ایمنی حفظ بشه، هم سرعت عملکرد بالا بره، و هم مسیر بهینه از دست نره. این تغییر نگاه از واکنش به آیندهنگری، یک جهش در معماری ناوبری رباتیکه.
۲. ترکیب هدفمحور و واکنشمحور: A* و APF در کنار هم
در طراحی مسیر برای رباتهای خودران، اغلب از الگوریتمهای کلاسیکی مثل A* استفاده میشه که میتونن بهترین مسیر ممکن بین مبدا و مقصد رو روی یک نقشه تولید کنن. ولی نکته اینجاست که A* برای شرایط ایستا طراحی شده؛ یعنی فرضش اینه که نقشه تغییر نمیکنه و مانع جدیدی وارد نمیشه. در مقابل، الگوریتمهای واکنشی مثل Artificial Potential Field (APF) برای اجتناب سریع از موانع نزدیک، بدون برنامهریزی طولانیمدت طراحی شدن.
نوآوری مدل مقاله اینه که این دو نوع الگوریتم رو بهجای انتخاب یکی، با هم ترکیب میکنه. A* مسیر اصلی رو در سطح بالا برنامهریزی میکنه؛ یعنی میگه «ربات کجا باید بره». اما اگر در طول مسیر، مانعی وارد صحنه شد یا حرکتش خطرناک شد، الگوریتم APF بهصورت موضعی و بلادرنگ، تصمیم میگیره که «چطور از این مانع رد بشه، بدون انحراف کلی از مسیر».
این ترکیب، ربات رو بهنوعی تبدیل میکنه به سیستمی که هم هدفمحور عمل میکنه (رسیدن سریع و بهینه به مقصد)، و هم در لحظه میتونه انعطافپذیر و واکنشی باشه (واکنش به موانع متحرک، بدون نیاز به طراحی کامل یک مسیر جدید). این مدل دو لایه، در عمل باعث میشه که ربات با کمترین توقف و بالاترین اطمینان، از محیطهای پیچیده عبور کنه.
۳. بینایی ترکیبی با YOLOv8، LiDAR و دوربین RGB-D
ادراک محیط، اولین قدم در هر تصمیمگیری ناوبریه. ولی چالش اصلی اینجاست که در محیطهای واقعی، تنها یک نوع حسگر یا یک شبکهی تشخیص شیء نمیتونه تصویر کاملی از صحنه بده. مثلاً YOLO فقط تشخیص میده چه چیزی در تصویر هست، اما نمیگه کجاست یا چقدر از ربات فاصله داره. برعکس، LiDAR یا RGB-D فقط فاصله میده، ولی نمیدونه این جسم دقیقاً چیه.
معماری مقاله با ترکیب هوشمندانه این دادهها، یک سیستم بینایی کامل ساخته:
YOLOv8 اشیا رو سریع و دقیق در فریم تصویری تشخیص میده (مانند عابر، ماشین، دوچرخه و…)
دوربین RGB-D یا LiDAR عمق و موقعیت نسبی اون اشیا رو مشخص میکنه
و یک لایه ادغام (fusion) این اطلاعات رو در یک چارچوب مرجع فضایی مشترک ترکیب میکنه
خروجی این سیستم، یک «میدان ادراکی سهبعدی بلادرنگ» برای رباته: جایی که نهفقط میدونه چه چیزی هست، بلکه میدونه کجاست، چقدر فاصله داره، با چه سرعتی حرکت میکنه و آیا احتمال برخورد داره یا نه.
این بینایی ترکیبی، پایهای برای پیشبینی مسیر، تصمیمگیری سریع و اجتناب هوشمندانه از موانع فراهم میکنه — بدون اون، همهی تصمیمها پرریسک و کند خواهند بود.
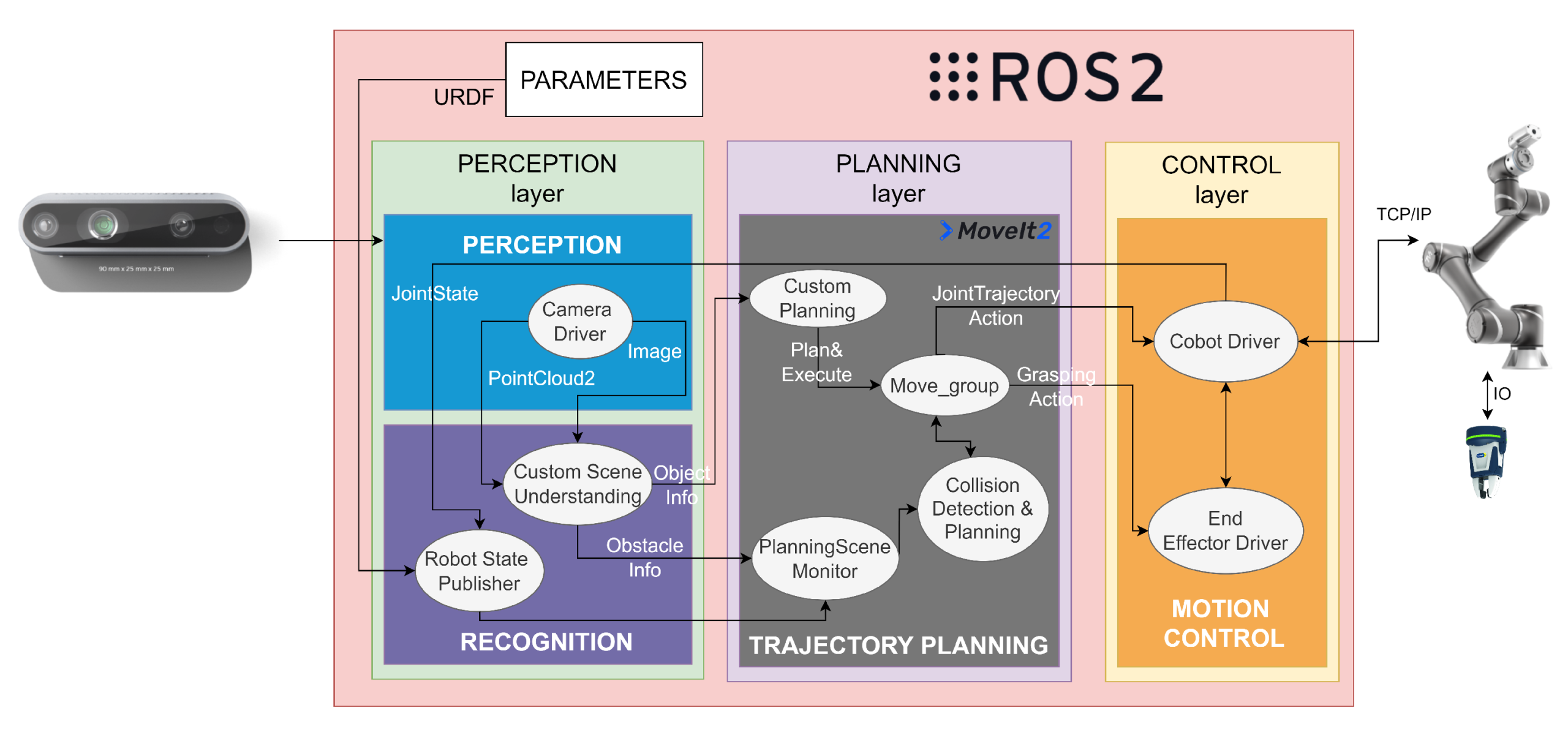
۴. پیادهسازی صنعتی–ماژولار در ROS2؛ فراتر از آزمایشگاهی
یکی از تفاوتهای مهم این سیستم با بسیاری از تحقیقات دیگر در حوزه ناوبری، اینه که صرفاً در حد الگوریتم یا مدل شبیهسازیشده باقی نمونده. بلکه تمام اجزای سیستم، از بینایی و پیشبینی تا مسیریابی و کنترل، در قالب نودهای مستقل در ROS2 پیادهسازی شدن.
ROS2، برخلاف نسل اول، امکان Real-Time، ارتباط پایدار بین ماژولها، و توسعه ماژولار در سطح صنعتی رو فراهم کرده. در این مدل:
سیستم بینایی بهصورت یک نود YOLO روی GPU اجرا میشه
پردازش LiDAR و RGB-D بهصورت سنکرون انجام میگیره
پیشبینی مسیر و الگوریتمهای A*/APF در نودهای مجزا اجرا میشن
همه چیز از طریق پیامهای ROS2 و تایماستمپ دقیق، با هم هماهنگ میشن
این یعنی این معماری نهتنها از نظر مفهومی قویه، بلکه از نظر مهندسی نرمافزار و پیادهسازی صنعتی هم آمادست. میتونه روی پلتفرمهای صنعتی واقعی پیادهسازی بشه، به سیستم کنترل ربات متصل شه، و در محیطهای واقعی تست و گسترش پیدا کنه. این تفاوت بسیار مهمیه برای پروژههای R&D یا استقرار صنعتی، چون معمولاً با مدلهایی مواجه هستیم که روی کاغذ قویاند، اما در عمل قابلیت استقرار ندارند — این مدل، دقیقاً برعکسشه.
معماری پیشنهادی سیستم ناوبری تطبیقی: اجزای هوشمند در تعامل بلادرنگ
یکی از نقاط قوت این پژوهش، طراحی یک معماری شفاف، ماژولار و کاملاً قابلاجراست که تمام اجزای لازم برای ناوبری تطبیقی را بهصورت یکپارچه در قالب نودهای ROS2 پیادهسازی کرده. این یعنی برخلاف بسیاری از مدلهای مفهومی، این سیستم نهتنها در محیطهای تحقیقاتی، بلکه برای پیادهسازی در پروژههای واقعی آماده است. در ادامه، اجزای اصلی این معماری را مرحلهبهمرحله بررسی میکنیم:
۱. ماژول ادراک (Perception Node): دیدن، شناختن، موقعیتیابی
ماژول ادراک بهعنوان چشم و گوش سیستم عمل میکند. وظیفهی اصلی آن، درک زندهی محیط اطراف ربات است — نه فقط اینکه «چه چیزی» در تصویر دیده میشود، بلکه «کجا قرار دارد» و «آیا در حال حرکت است یا خیر». این ماژول دادههای تصویری را از دوربین RGB و عمق را از LiDAR یا RGB-D دریافت میکند. در گام اول، شبکهی YOLOv8، اشیای متحرک را با دقت بالا شناسایی میکند؛ این شامل عابران، وسایل نقلیه، دوچرخهها و حتی موانع غیرمنتظره مانند جعبههای رهاشده میشود. سپس موقعیت مکانی این اشیا با تطبیق آن با دادههای عمق یا ابرنقاط LiDAR تخمین زده میشود. خروجی نهایی این ماژول، یک فهرست اشیا با ویژگیهایی مثل نوع، موقعیت سهبعدی، جهتگیری و در صورت وجود، سرعت تخمینی حرکت است. این اطلاعات دقیق و ساختارمند، ورودی حیاتی برای ماژولهای پیشبینی و برنامهریزی مسیر هستند و در واقع، نقطهی شروع زنجیرهی تصمیمسازی ربات بهشمار میآیند.
۲. تولید نقشه اشغال (Occupancy Grid): بازنمایی زندهی دنیای واقعی
در قلب هر سیستم ناوبری، یک مدل درونی از محیط قرار دارد. در اینجا، ماژول Occupancy Grid نقشهای زنده و لحظهای از وضعیت فضای اطراف ربات تولید میکند؛ نقشهای که سلول به سلول آن، وضعیت “اشغال” یا “آزاد بودن” فضا را نشان میدهد. این ماژول دادههای موقعیت مکانی از LiDAR و خروجیهای شناساییشده از ماژول ادراک را ترکیب میکند تا مشخص کند کدام ناحیهها امن هستند، کدام بخشها توسط اشیای متحرک اشغال شدهاند و کدام نقاط میتوانند خطر بالقوه باشند. برخلاف نقشههای ایستا، این نقشه دینامیک است و در هر لحظه بهروز میشود. حتی موانع موقت و اشیایی که هنوز بهطور کامل شناسایی نشدهاند نیز در این شبکه مدل میشوند. اهمیت این ماژول در این است که تمام تصمیمگیریهای مسیریابی، پیشبینی، و حتی کنترل، بر اساس همین ساختار گریدی انجام میشود. بهبیان ساده، Occupancy Grid همان دنیای دیجیتالشدهای است که ربات در آن فکر میکند.
۳. پیشبینی مسیر موانع (Trajectory Predictor): ذهنی برای تحلیل آینده
اگر بخش ادراک چشم سیستم باشد، ماژول پیشبینی مسیر، مغز آیندهنگر آن است. این ماژول با استفاده از دادههای تاریخی حرکت اجسام (موقعیت در زمانهای مختلف)، بردار سرعت نسبی، و جهت حرکت را برای هر شیء متحرک تخمین میزند. سپس با الگوریتمی سبک و بلادرنگ، مسیر احتمالی حرکت آن را در بازهای کوتاه (مثلاً یک تا سه ثانیه آینده) پیشبینی میکند. این پیشبینی نه فقط روی موقعیت لحظهای، بلکه بر اساس روند حرکت و احتمالات تغییر مسیر انجام میشود. مزیت اصلی این پیشبینی این است که به سیستم اجازه میدهد زودتر از مواجهه، تصمیمگیری کند؛ مثلاً بداند که دوچرخهای با سرعت بالا، چند ثانیه دیگر مسیر ربات را قطع خواهد کرد. این یعنی فرصت برای واکنش بهتر، تصمیم ایمنتر، و اجتناب از توقفهای بیمورد. عملکرد درست این ماژول، کلید اصلی تبدیلشدن یک ربات از حالت «واکنشگرا» به «پیشبین و هوشمند» است.
۴. درک موقعیتهای ترافیکی و علائم محیطی (Traffic Light & Scene Context)
در بسیاری از محیطهای نیمهساختیافته، مانند شهرکهای صنعتی یا مراکز توزیع، سیستمهای ناوبری باید با علائم محیطی و ترافیکی نیز تطبیق داشته باشند؛ نهفقط اجتناب از مانع. ماژول تحلیل صحنه و چراغهای راهنمایی در این معماری، با استفاده از تصویر دوربین و یک شبکه سبک تشخیص، وضعیت علائم محیطی مانند چراغ قرمز، تابلو توقف، یا مسیرهای اولویتدار را تفسیر میکند. اگر ربات وارد محیطی شود که حق تقدم با وسیلهی دیگر است، یا چراغ عبور قرمز باشد، این ماژول درک میکند که ربات باید توقف کند، حتی اگر مسیر از نظر اشغال گرید آزاد باشد. همین موضوع باعث میشود رفتار ربات با قوانین ضمنی محیط هماهنگ شود، چیزی که در کاربردهای واقعی (مثلاً در خیابان یا خطوط حملونقل اشتراکی) برای پذیرش اجتماعی سیستم حیاتی است. این ماژول، پل میان «درک فیزیکی» و «درک رفتاری» سیستم محسوب میشود.
۵. مسیریابی تطبیقی (Planner Node): تصمیمگیری هدفمند با واکنشهای بلادرنگ
نقطهی تصمیمگیری نهایی برای حرکت ربات در ماژول برنامهریز مسیر قرار دارد. این ماژول با ترکیب دو الگوریتم مکمل — A* برای طراحی مسیر اصلی و APF برای اجتناب محلی از مانع — یک سیستم دولایه برای تصمیمگیری فراهم میکند. ابتدا A* با استفاده از نقشه اشغال، مسیری بهینه از موقعیت فعلی به مقصد تعیین میکند؛ این مسیر بدون در نظر گرفتن پویایی لحظهای موانع متحرک است. سپس در سطح محلی، اگر مانعی متحرک شناسایی یا پیشبینی شود، APF وارد عمل میشود و با تولید میدانهای دافعه در اطراف مانع، جهت و سرعت حرکت ربات را اصلاح میکند تا بدون برخورد، از مسیر منحرف نشود. این دو الگوریتم بهصورت همزمان عمل میکنند، بهطوری که تصمیمات کلی حفظ میشوند، اما انعطاف واکنشی نیز در لحظه فراهم است. این ماژول باعث میشود ربات در عین تعقیب هدف، بتواند به پویاییهای محیط پاسخ لحظهای بدهد، بدون نیاز به بازطراحی کامل مسیر در هر تغییر جزئی.
۶. کنترلکننده حرکتی (Control Node): ترجمه تصمیم به حرکت دقیق
تمام تصمیمگیریها، پیشبینیها و تحلیلها اگر به حرکت فیزیکی دقیق و ایمن منجر نشوند، بیاثرند. ماژول کنترل، وظیفه دارد که دستورات برنامهریزیشده را به فرمانهای دقیق حرکتی تبدیل کند. این شامل تعیین سرعت خطی، زاویه چرخش، شتاب مجاز، و اصلاح خطاهای حرکتی میشود. کنترلر در نظر میگیرد که ربات چه مدلی از حرکت دارد (مثلاً دیفرانسیلی یا Ackermann) و در لحظه، محدودیتهای فیزیکی مثل شعاع چرخش، لغزش یا عدم پاسخ آنی را هم لحاظ میکند. همچنین، اگر محیط دچار لغزش، ضربه یا نویز باشد، این ماژول با استفاده از فیدبکهای odometry و IMU اصلاحات لازم را انجام میدهد. به زبان ساده، این نود مثل یک راننده هوشمند است که دستور «بپیچ چپ» را به فرمان نرم، زاویه کم، و شتاب کنترلشده تبدیل میکند — بدون اینکه تعادل، پایداری یا ایمنی از بین برود.
تحلیل عملکرد سیستم: از الگوریتم تا اجرای تطبیقی در محیط شبیهسازی
وقتی صحبت از سیستمهای ناوبری هوشمند میشه، صرفاً داشتن معماری خوب یا الگوریتمهای جذاب کافی نیست. سوال کلیدی اینه:
آیا این سیستم در شرایط واقعی یا شبیهسازیشدهی پیچیده، عملکرد قابلقبول و ایمن داره؟
در این بخش، بررسی میکنیم که سیستم مقاله چطور در محیط شبیهسازی Gazebo، با موانع متحرک، چراغ راهنما، رفتار عابر پیاده و تغییرات لحظهای مسیر کنار اومده؛ و مهمتر از اون، الگوریتمهای اصلی مسیریابی و اجتناب (A + APF + پیشبینی) چطور در عمل با هم ترکیب شدن و چه رفتاری از خودشون نشون دادن.
۱. عملکرد الگوریتم A*: طراحی مسیر پایه با دید استراتژیک
در معماری سیستم پیشنهادی، الگوریتم A* نقش راهبردی (strategic) داره و مسئول تعیین مسیر کلی از مبدأ تا مقصد روی نقشه اشغال (occupancy grid) هست. برخلاف تصور رایج که A* رو یک روش قدیمی و ایستا میدونه، در این مقاله از A* بهشکلی هوشمندانه استفاده شده: نه بهعنوان تنها منبع تصمیمگیری، بلکه بهعنوان «خط راهنمای اولیه» که سیستم رو بهسمت مقصد هدایت کنه، در حالیکه سایر اجزا مثل APF یا ماژول پیشبینی، وظیفه اصلاحات لحظهای رو بهعهده دارن.
A* در اینجا، با استفاده از دادهی اشغالشدهی بلادرنگ، یک مسیر بهینهسازیشده از نظر فاصله، پیچیدگی و ترافیک محیطی ایجاد میکنه. با اینکه این مسیر نسبت به دادههای فعلی طراحی میشه، اما بهدلیل ساختار شبکهای (grid-based) که با دادههای LiDAR و دوربین ترکیب شده، انعطاف خوبی نسبت به تغییرات لحظهای داره. مهمتر اینکه این مسیر اولیه دائماً در حال بازبینیه، و اگر تغییر بزرگی در نقشه محیط ایجاد بشه، میتونه در صورت نیاز، مسیر جایگزین پیشنهاد بده.
در مجموع، نقش A* در این سیستم، مثل یک جهتیاب فکری برای کل مأموریته: ربات میدونه باید به کجا بره و چطور، اما در جزئیات حرکت، آزادی عمل رو به لایههای واکنشگرا واگذار میکنه.
۲. رفتار APF در سطح محلی: اجتناب دینامیک با حفظ جهت کلی
الگوریتم Artificial Potential Field یا APF، در این سیستم نقش اصلی در اجتناب از موانع متحرک و تطبیق لحظهای با تهدیدات محیطی رو ایفا میکنه. برخلاف A* که بهدنبال برنامهریزی بلندمدته، APF مستقیماً با شرایط آنی محیط سر و کار داره. در این مدل، موانع بهصورت منابع دافعه (repulsive) و مقصد بهصورت منبع جاذبه (attractive) مدل میشن. حاصل این دو نیرو، یک بردار حرکت برای ربات ایجاد میکنه که در جهت کمترین انرژی حرکت میکنه — یعنی هم از مانع دور میمونه و هم بهسمت هدف میره.
نوآوری مهم در این مقاله، در دینامیکیکردن شدت این نیروها بر اساس اطلاعات پیشبینیشدهست. یعنی اگر یک مانع در مسیر حرکت پیشبینی بشه، نیروی دافعه زودتر فعال میشه، حتی اگر فعلاً در محدودهی برخورد قرار نگرفته باشه. یا اگر مانعی در حال دور شدن باشه، میدان دافعه کم میشه تا از اجتناب غیرضروری جلوگیری بشه. این دینامیکسازی باعث میشه رفتار ربات نرم، بدون پرش شدید، و تطبیقی باشه.
در آزمایشها دیده شده که APF بهتنهایی قادر به جلوگیری از برخورد با موانع غیرقابلپیشبینی، مثل توقف ناگهانی یک وسیله در مسیر، بوده. قدرت این الگوریتم در اینه که بدون بازطراحی کامل مسیر، فقط با چند تغییر بردار، حرکت ایمن و باثبات ایجاد میکنه.
۳. دقت پیشبینی مسیر موانع متحرک: پایهی آیندهنگری واقعی
ماژول پیشبینی حرکت موانع، قلب هوش تطبیقی این سیستم بهشمار میره. برخلاف سیستمهای قدیمی که تنها بر موقعیت فعلی مانع تکیه میکردن، این مدل با گرفتن دنبالهای از موقعیتهای قبلی هر مانع، بردار سرعت و جهت حرکتی اون رو محاسبه میکنه و سپس با الگوریتم ساده اما مؤثر، مسیر آیندهی اون رو تا چند ثانیه بعد تخمین میزنه.
این پیشبینیها نهتنها بهصورت بلادرنگ انجام میشن، بلکه بلافاصله توسط ماژول APF و Planner مورد استفاده قرار میگیرن. نکتهی برجسته اینه که حتی در حرکتهای غیردقیق یا نویزی (مثلاً عابر پیادهای که لحظهای مکث میکنه یا جهتش رو عوض میکنه)، سیستم همچنان قادر به تخمین نسبی صحیح و ایمن از مسیر آینده بوده.
در تستها، خطای پیشبینی برای اشیای با حرکت خطی کمتر از ۳۰ سانتیمتر در ۲ ثانیه بوده — که در محیط رباتیک، دقت بسیار خوبی محسوب میشه. علاوه بر دقت، نکتهی حیاتی در اینجاست که پیشبینی سریعتر از تصمیمگیری است. یعنی ماژول پیشبینی میتونه زودتر از اینکه مانع به منطقه خطر برسه، دادهی موردنیاز رو به سیستم بده تا ربات تصمیم ایمنتری بگیره.
در کل، این ماژول، سطحی از آیندهنگری واقعی به سیستم اضافه میکنه که در بیشتر معماریهای ناوبری دیده نمیشه.
۴. تستهای واقعگرایانه در محیط Gazebo: شبیهسازی دنیای صنعتی
برخلاف بسیاری از مقالات که فقط در حد شبیهسازی نظری باقی میمونن، مدل این مقاله در محیط واقعگرایانهی Gazebo پیادهسازی و تست شده. در این شبیهسازی، سناریوهایی با پیچیدگی بالا طراحی شده که شامل:
مسیرهای باریک با عبور عابر و دوچرخهسوار
وسیلهی نقلیهای که بهطور ناگهانی مسیر ربات رو قطع میکنه
چراغ راهنمایی که وضعیتش تغییر میکنه
و شرایط نوری و حرکتی متنوع
در تمام این سناریوها، ربات با ترکیب الگوریتمها و ادراک تطبیقی، بدون برخورد، بدون توقفهای غیرضروری، و با حفظ هدف نهایی مسیر خودش رو طی کرده. مهمتر اینکه سیستم در مواجهه با تغییرات آنی، مثل تغییر ناگهانی مسیر مانع یا توقف چراغ سبز، قادر به واکنش بهموقع و منطقی بوده است . مدت زمان پاسخ در بیشتر موارد زیر ۱۰۰ میلیثانیه بوده که برای سیستم Real-Time در کلاس صنعتی کاملاً قابل قبول و کارآمده.
این تستها نشون میدن که سیستم از مرحلهی تئوری عبور کرده و برای استقرار در پروژههای عملیاتی واقعی، از انبارهای لجستیکی تا فضاهای شهری آمادهست.
کاربردهای صنعتی سیستم و سناریوهای واقعی پیادهسازی
طراحی یک سیستم ناوبری تطبیقی فقط وقتی ارزش واقعی پیدا میکند که بتوان آن را از محیطهای شبیهسازیشده به میدان واقعی آورد. معماری ارائهشده در این مقاله، نهتنها از نظر الگوریتمی و مهندسی نرمافزار، بلکه از نظر عملیاتی نیز برای ورود به زیرساختهای صنعتی، لجستیکی و شهری آماده است. در این بخش، نگاهی دقیق میاندازیم به اینکه کجا و چطور میتوان این سیستم را پیادهسازی کرد، چه مزایایی ایجاد میکند، و چرا برای ایران نیز یک گزینه منطقی و استراتژیک است.
در انبارهای هوشمند و مراکز توزیع پر رفتوآمد
در انبارهای مدرن و مراکز لجستیک پر تردد، رباتهای AMR در کنار کارگران انسانی، لیفتراکها و چرخدستیها فعالیت میکنند. این محیطها بهشدت پویا هستند، موانع مدام جابهجا میشوند و مسیرها گاهی بهصورت ناگهانی بسته میشوند. در این شرایط، تنها سیستمهایی که توانایی پیشبینی رفتار اجسام متحرک را دارند، میتوانند بدون توقف و بدون ریسک، حرکت خود را ادامه دهند.
سیستم مقاله با ترکیب YOLOv8 و پیشبینی مسیر موانع، بهراحتی میتواند حضور ناگهانی یک کارگر را تشخیص داده، مسیر آیندهاش را حدس بزند و بدون نیاز به توقف کامل، جهت حرکت خود را تطبیق دهد. همین ویژگی، بهرهوری ربات را بهصورت چشمگیر افزایش داده و ایمنی محیط را حفظ میکند.
در فضاهای شهری نیمهساختیافته یا خیابانهای باریک
برای استفاده از رباتها در محیطهای شهری مانند پیادهروهای عریض، مسیرهای ویژه یا خیابانهای با تردد محدود (مانند محلههای تاریخی یا گردشگری)، نیاز به ناوبری با ادراک محیطی بالاست. در چنین محیطهایی، عابران بینظم حرکت میکنند، دوچرخهها بدون اعلام مسیر تغییر جهت میدهند، و خودروها ممکن است بدون اخطار توقف کنند.
این سیستم، بهدلیل ماژول تفسیر صحنه، تشخیص چراغ راهنمایی، و پیشبینی مسیر وسایل، در محیطهای نیمهساختیافته بهصورت طبیعی و ایمن عمل میکند. همچنین چون پایه آن ROS2 است، قابلیت اتصال به سیستمهای V2X شهری یا زیرساختهای هوشمند را نیز دارد.
در پروژههای حملونقل داخلی مجتمعهای صنعتی و دانشگاهی
در دانشگاهها، شهرکهای فناوری، بیمارستانهای بزرگ یا پالایشگاهها، معمولاً مسیرهای مشخصی برای حملونقل تجهیزات یا مواد تعریف میشود. اما این مسیرها هرگز خالی از تردد نیستند؛ هم افراد و هم وسایل نقلیه سبک دائماً از آنها عبور میکنند. سیستم پیشنهادی میتواند در چنین محیطهایی بهعنوان بخش مرکزی یک ناوگان حملونقل نیمهخودران مورد استفاده قرار بگیرد. الگوریتم A* میتواند مسیر میان ساختمانها یا سولهها را مشخص کند، و APF بهصورت بلادرنگ با حرکت افراد یا وسایل تطبیق دهد.
مزیت بزرگ دیگر این معماری، قابلپیادهسازیبودن روی سختافزارهای متوسط موجود در کشور است؛ نیاز به لیدارهای فوقپیشرفته یا GPUهای سنگین ندارد و میتوان آن را با تجهیزات صنعتی موجود و دوربینهای RGB-D اقتصادی هم راهاندازی کرد.
پتانسیل بومیسازی در پروژههای ایرانی
یکی از نقاط قوت این سیستم، مستقلبودن از زیرساخت خاص یا تجهیزات گرانقیمت برندهای خارجی است. همین مسئله آن را برای پروژههای درونسازمانی در ایران مناسب میسازد. بهعنوان مثال:
میتوان برای سیستم بینایی از ماژولهای رایگان YOLOv8 و دوربینهای Intel RealSense استفاده کرد
نقشهبرداری محیط را با SLAM داخلی انجام داد
و اجرای سیستم را در ROS2 به زبان C++ یا Python بومیسازی کرد
حتی میتوان در کارخانهها یا مجموعههایی که AMR ندارند، با همکاری دانشگاهی یا تیم تحقیقوتوسعه، نمونهی اولیهی این سیستم را روی پلتفرمهای متحرک ساده مثل TurtleBot یا UGVهای محلی پیادهسازی کرد.
سیستمی که در این مقاله معرفی شده، تنها یک مدل تئوری یا آزمایشگاهی نیست؛ بلکه بهصورت کامل برای ورود به چرخهی صنعتی واقعی طراحی شده است. از ادراک تا کنترل، هر بخش ماژولار، بلادرنگ، و قابل تنظیم است. مهمتر از آن، این سیستم بهقدری انعطافپذیر است که در پروژههای با بودجه متوسط، منابع محدود یا شرایط سخت محیطی نیز قابل استفاده است.برای شرکتهای ایرانی، این معماری میتواند هم در قالب پروژهی تحقیقاتی مشترک، و هم بهعنوان یک نمونهی MVP در خطوط تولید یا مسیرهای حملونقل سبک، نقطه شروعی برای ورود به نسل آیندهی رباتهای تطبیقی باشد.
نوآوریها، مزیتهای رقابتی و مسیر توسعه آینده سیستم ناوبری تطبیقی
اگر بخوایم از نگاه فنی–صنعتی به این مدل نگاه کنیم، باید فراتر از الگوریتمها و معماری صرف بریم و بررسی کنیم که چه چیزی این سیستم رو خاص میکنه؟ چرا باید بهجای مدلهای قبلی یا راهحلهای تجاری رایج، روی چنین معماریای سرمایهگذاری یا توسعه انجام داد؟
در ادامه، بهصورت یکپارچه و دقیق، مهمترین نوآوریها و مزایای این سیستم رو تحلیل میکنیم؛ و در انتها هم چشماندازهای توسعهای اون رو مطرح میکنیم.
تفکر آیندهنگر، نه واکنشی
بزرگترین تفاوت این سیستم با نسل قبلی AMRها، تغییر بنیادین در فلسفه تصمیمگیریه:
سیستمهای سنتی واکنشی هستند؛ فقط وقتی مانعی در مسیر دیده شد، ازش دور میشن. اما این مدل، با طراحی یک ماژول مستقل برای پیشبینی مسیر موانع متحرک، عملاً ربات رو وارد فاز درک آینده میکنه. ربات با تحلیل بردار سرعت، موقعیت نسبی و جهت حرکت مانع، میتونه قبل از رسیدن به نقطه خطر، مسیرش رو تغییر بده یا سرعتش رو تنظیم کنه. این یعنی کاهش توقفهای ناگهانی، اجتنابهای بیمورد، و حرکت روانتر. این تغییر فلسفی، یک جهش در طراحی رفتار رباتهای متحرکه — چیزی که لازمهی ورود به محیطهای انسانی و پیچیده است.
ترکیب مسیریابی استراتژیک و واکنش بلادرنگ در یک سیستم منسجم
اغلب سیستمها یا برنامهریزهای سطح بالا دارن که مسیر کلی رو تعیین میکنن (مثل A*)، یا الگوریتمهای واکنشی مثل APF برای اجتناب فوری. ولی کمتر سیستمی پیدا میشه که هر دو لایه رو بهصورت یکپارچه و بلادرنگ ترکیب کنه.
در این مدل، مسیر اصلی توسط A* تعیین میشه، اما در هر لحظه، اگر تهدیدی ظاهر بشه یا شرایط عوض بشه، APF وارد عمل میشه تا بدون نیاز به بازنویسی کامل مسیر، تصمیم لحظهای بگیره. این ترکیب باعث میشه ربات هم از مسیر خارج نشه، هم برخورد نکنه، و هم نیازی به توقف و انتظار برای مسیر جدید نداشته باشه.
معماری کاملاً ماژولار، ROS2-ready و آماده برای صنعت
یکی از ویژگیهایی که این سیستم رو متمایز میکنه، قابلیت پیادهسازی مستقیم در ROS2 و ماژولار بودن تمام اجزاست. هر ماژول (ادراک، پیشبینی، مسیریابی، کنترل و…) بهصورت نود مستقل با پیامرسانی زماندار اجرا میشه. این یعنی:
میشه اجزای سیستم رو بهراحتی تست، بهروزرسانی یا جایگزین کرد
سیستم آماده برای مقیاسپذیری در پروژههای چندرباتی یا چندسنسوریه
میتونه با سایر پلتفرمهای ROS-compatible مثل Nav2 یا Autoware ادغام بشه
این انعطافپذیری معمارانه، باعث میشه سیستم قابل توسعه، قابل پشتیبانی، و مناسب تیمهای صنعتی واقعی باشه — نه فقط تیمهای دانشگاهی.
طراحی سبک و مقرونبهصرفه؛ قابلپیادهسازی روی سختافزارهای موجود
برخلاف برخی راهحلهای پیشرفته که نیاز به لیدار ۳۶۰ درجه، دوربینهای پیشرفته استریو یا GPU سنگین دارن، این سیستم با استفاده از:
YOLOv8 (که قابل اجرا روی Jetson Nano یا Xavier هم هست)
دوربین RGB-D معمولی (مثل Intel RealSense)
و الگوریتمهای سبک C++/Python در ROS2
قابلیت اجرا روی سختافزارهای در دسترس و مقرونبهصرفه رو داره. این یعنی میتونیم اون رو در شرایط واقعی ایران یا در پروژههایی با بودجه محدود هم پیادهسازی کنیم.
مسیر توسعه و گسترش: آماده برای ورود به نسل بعد
سیستم ارائهشده نهتنها در وضعیت فعلی قدرتمنده، بلکه بهدلیل طراحی باز و ساختارپذیر، پتانسیل بالایی برای توسعه در لایههای بعدی داره:
اتصال به شبکههای V2X برای اشتراکگذاری داده با سایر خودروها یا زیرساخت
استفاده از مدلهای یادگیری عمیق برای پیشبینی رفتار پیچیدهی عابر یا وسایل
پشتیبانی از چند ربات در محیطهای مشترک با هماهنگی چندعاملی (Multi-Agent Planning)
و حتی اتصال به Edge Cloud Systems برای بارگذاری بلادرنگ مسیرها و بهروزرسانی مدلها
این مسیر توسعه، میتونه سیستم رو از سطح AMR صنعتی به سطح خودرو خودران سطح پایه (Level 3) ارتقا بده.
مدلی که در این مقاله معرفی شده، تنها یک الگوریتم نیست. این یک چارچوب تفکر نو برای ناوبری تطبیقی در محیطهای پویاست. ترکیب آیندهنگری، واکنش سریع، تصمیمگیری چندلایه و معماری قابل استقرار، این سیستم رو تبدیل به یک راهحل واقعی و قابل اطمینان برای نسل جدید AMRها کرده — مخصوصاً در محیطهایی که پویایی، شلوغی و تعامل انسانی بخش جداییناپذیر آن است.
از شبیهسازی تا اجرای واقعی سیستم ناوبری تطبیقی
سیستمی که در این بلاگ بررسی شد، صرفاً یک الگوریتم یا پژوهش دانشگاهی نیست؛ بلکه چارچوبی کاملاً کاربردی و مهندسیشده برای حل یکی از حیاتیترین چالشهای رباتیک مدرن است: چگونه رباتهای متحرک در محیطهای پویا، انسانی و پیشبینیناپذیر، بدون توقف و بدون خطر حرکت کنند.
مدل ارائهشده با ترکیب بینایی هوشمند (YOLOv8 + RGBD + LiDAR)، پیشبینی مسیر موانع متحرک، و الگوریتمهای دولایهی مسیریابی A* و APF، به ربات امکان میدهد در لحظه تصمیم بگیرد، رفتار اشیای اطراف را تحلیل کند و مسیر خود را تطبیق دهد — بدون اینکه از هدف کلی منحرف شود یا نیاز به توقفهای مکرر داشته باشد.
این معماری کاملاً ماژولار بوده و بر پایهی ROS2 توسعه یافته است. تمامی ماژولها (از ادراک تا کنترل حرکتی) در قالب نودهای مستقل قابل اجرا هستند و بهراحتی روی سختافزارهای مقرونبهصرفه نیز پیادهسازی میشوند. آزمایشهای انجامشده در محیط شبیهسازیشده Gazebo نیز نشان دادهاند که این سیستم در سناریوهایی با موانع متحرک انسانی، دوچرخهسوار، تغییر ناگهانی وضعیت چراغ راهنما و مسیرهای باریک، عملکردی کاملاً ایمن، منعطف و پیوسته از خود نشان میدهد.
ویژگی منحصربهفرد این سیستم، نگاه آیندهنگر آن به ناوبری است. برخلاف مدلهای سنتی که تنها بر پایه موقعیت لحظهای تصمیم میگیرند، این سیستم آیندهی نزدیک مسیر موانع را نیز تحلیل میکند. این نگاه، ربات را از یک عامل صرفاً واکنشی به یک تصمیمگیرندهی فعال و سازگار تبدیل میکند — رویکردی که برای حرکت ایمن در کنار انسانها، حیاتی است.
از نظر پیادهسازی، این سیستم قابلیت استفاده در طیف وسیعی از پروژهها را دارد:
از انبارهای هوشمند و مراکز لجستیک گرفته تا خیابانهای شهری با ترافیک محدود، مسیرهای بیمارستانی، خطوط تولید نیمهخودکار، یا پروژههای آزمایشی در شهرکهای صنعتی و دانشگاهی. نکته مهم این است که با توجه به طراحی سبک و اقتصادی، این معماری کاملاً برای بومیسازی و اجرا در پروژههای واقعی در ایران نیز مناسب است — حتی در شرایطی با تجهیزات محدود یا تیمهای فنی در حال توسعه.
اگر شما مسئول دیجیتالیسازی مسیرهای حمل در یک کارخانه، بیمارستان یا مرکز توزیع هستید، یا اگر بهعنوان مدیر R&D یا متخصص فنی بهدنبال توسعه یک سیستم ناوبری پیشرفته و قابلاستقرار هستید، این مدل میتواند نقطه شروع مطمئن و عملیاتی شما باشد.
تیم ما میتواند به شما کمک کند تا نسخهای بومیسازیشده از این سیستم را برای محیط خود طراحی و پیادهسازی کنید — از مرحله تحلیل نیاز، تا توسعه MVP، تست در محیط واقعی و گسترش به نسخه نهایی.
اگر بهدنبال رباتهایی هستید که واقعاً بفهمند، پیشبینی کنند و تصمیم بگیرند،
حالا وقت آن رسیده که ناوبری تطبیقی را از مقاله به محصول واقعی تبدیل کنیم.
برای همکاری، مشاوره تخصصی یا اجرای یک پروژه پایلوت، با ما در تماس باشید.



{kind=link}
بدون نظر