

وقتی ناوبری دقیق، بدون GPS یا LiDAR ممکن میشود
در بسیاری از محیطهای صنعتی، ناوبری رباتهای خودکار به دلیل شرایط فیزیکی فضا دچار محدودیتهای جدی است. سقفهای فلزی، دیوارهای شیلد شده، نور نامتعادل و سطوح پر بازتاب، استفاده از GPS، LiDAR یا سیستمهای بینایی پیچیده را نهتنها پرهزینه، بلکه گاهی غیرممکن میکنند.
با این حال، در همین محیطها، نیاز به رباتهایی که بتوانند با دقت موقعیت خود را حفظ کرده و به مقصد برسند، بیش از هر زمان دیگری حس میشود — بهویژه در صنایعی مثل خودروسازی، صنایع فلزی، یا تولیدات سنگین، که فضاها بستهاند، شرایط محیطی خشن است و نقشهبرداری مداوم امکانپذیر نیست.
در چنین بستری، نیاز به یک راهحل ساده، سبک، و قابل اعتماد بیش از هر چیز دیگر مطرح میشود؛ معماریای که بتواند بدون تکیه بر سنسورهای گرانقیمت یا منابع محاسباتی بالا، فقط با اتکا به دادههایی مثل انکودر چرخ و IMU (واحد اندازهگیری اینرسی)، درک دقیقی از موقعیت لحظهای ربات ایجاد کند.
در پژوهشی که بررسی میکنیم، دقیقاً چنین رویکردی پیادهسازی شده: یک سیستم سبک برای تخمین موقعیت ربات متحرک، بر پایهی تلفیق دادههای زاویهای و خطی، بدون استفاده از GPS، بینایی ماشین یا نقشهبرداری لحظهای.
هستهی این سیستم بر پایهی فیلتر کالمن توسعهیافته (Extended Kalman Filter – EKF) بنا شده؛ فیلتری که سالها در صنایع هوافضا، خودرو و هوانوردی برای تخمین حالت سیستمهای پویا بهکار رفته، اما اینبار برای یک کاربرد زمینی و مهندسیسازیشده در رباتهای متحرک صنعتی بازطراحی شده است. هدف، ساخت مدلی است که بتواند:
با دادههای انکودر (تغییر موقعیت چرخ) و IMU (شتاب و نرخ چرخش)
در محیطهایی بدون دسترسی به GPS یا LiDAR
بهصورت بلادرنگ، موقعیت دقیق ربات را تخمین بزند
و در عین حال، سبک، سریع و قابل اجرا روی سختافزارهای صنعتی ساده باشد
اهمیت این روش در مقایسه با الگوریتمهای سنگین SLAM یا نقشهبرداری تصویری در این است که:
نیازی به محاسبات گرافی سنگین ندارد
وابسته به شبکه، ابررایانه یا زیرساختهای زیرساختی خاص نیست
قابلاستقرار در محیطهای صنعتی فعلی ایران با کمترین تغییرات است
این معماری، نهتنها برای محیطهای کنترلشده و بسته بسیار مناسب است، بلکه میتواند بهعنوان پایهٔ سیستم ناوبری در AMRهای اقتصادی یا پروژههای بومیسازیشدهٔ داخلی نیز مورد استفاده قرار گیرد — جایی که بسیاری از روشهای پیشرفته صرفاً بهخاطر هزینه یا پیچیدگی فنی، عملاً کنار گذاشته میشوند.
فرصتها و چالشهای فنی–صنعتی در ناوبری بدون GPS و LiDAR
درک مکان بدون دید جهانی؛ راهکاری که با شرایط واقعی صنعت سازگار است
در فضای آکادمیک، فرض بر این است که ناوبری خودران با استفاده از تجهیزات پیشرفته و دادههای مکفی انجام میشود: GPS دقیق، نقشهٔ دیجیتال کامل، سنسورهای پیشرفتهای چون LiDAR سهبعدی، و بسترهای پردازشی قدرتمند. اما در محیط صنعتی واقعی، بهویژه در کارخانههای تولیدی، انبارهای بزرگ، یا واحدهای لجستیکی ایران، تقریباً هیچیک از این زیرساختها در دسترس نیست یا اگر هم هست، بهدلایل عملیاتی، اقتصادی و فنی قابل اتکا نیست.
اینجا جاییست که نیاز به راهکارهای واقعگرایانه و مهندسیشده با حداقل وابستگی زیرساختی مطرح میشود. دقیقاً همان فضایی که سیستم مبتنی بر ادغام دادهٔ انکودر و IMU با فیلتر کالمن در آن طراحی شده است.
۱. ناپایداری یا فقدان GPS در محیطهای صنعتی داخلی
GPS شاید در محیط باز شهری کاربرد داشته باشد، اما در سولههای صنعتی چه؟
در خطوط تولیدی مسقف، انبارهای بسته، یا سالنهای شیلدشده، سیگنال GPS یا کاملاً قطع است، یا آنقدر نوسان دارد که نمیتوان روی آن برای ناوبری دقیق حساب کرد.
در کنار این، بسیاری از دستگاههای صنعتی قوی (مثل کورهها، ماشینهای جوش یا CNC سنگین)، میدانهای الکترومغناطیسی ایجاد میکنند که میتوانند باعث اخلال در گیرندههای GPS صنعتی شوند.
حتی اگر GPS کار کند، دقت آن معمولاً بین ۲ تا ۵ متر است؛ در حالی که در محیطهایی با مسیرهای باریک یا فاصلهٔ کم میان خطوط تولید، خطای بیش از ۲۰ سانتیمتر بهتنهایی میتواند باعث برخورد، توقف یا آسیب به تجهیزات شود.
بنابراین، در چنین سناریوهایی، هیچ سیستم صنعتی حرفهای نمیتواند صرفاً به موقعیتیابی جهانی (absolute) تکیه کند.
نیاز است که ربات بداند «خودش در لحظه، نسبت به مسیر طیشده، در کجا قرار دارد» — و این دقیقاً تعریف ناوبری نسبی (odometry-based) است، چیزی که انکودر و IMU در قلب آن قرار دارند.
۲. محدودیتهای کاربردی و اقتصادی LiDAR و سیستمهای بینایی
LiDAR یکی از پیشرفتهترین ابزارهای تشخیص محیط است، اما برای صنعت ایران، مشکلات جدی دارد:
هزینهی سختافزار: مدلهای دقیق با نرخ نمونهبرداری بالا، چندصدمیلیون تومان قیمت دارند.
حساسیت محیطی: بخار، گردوغبار، سطوح براق فلزی، رطوبت، یا حتی نور نامتعادل باعث اعوجاج یا حذف داده میشود.
نیاز به پردازش بالا: سیستمهای مبتنی بر LiDAR به الگوریتمهای سنگین مانند SLAM نیاز دارند. این پردازشها در شرایط صنعتی، جایی که باید پاسخ در میلیثانیه داده شود، کند هستند و گاهی باعث تصمیمات ناپایدار میشوند.
از سوی دیگر، سیستمهای بینایی (دوربین RGB، عمقسنج) نیز در محیطهای کمنور، شلوغ، یا دارای انسداد دید عملکرد مناسبی ندارند. در نتیجه، در بسیاری از خطوط صنعتی، ربات نمیتواند بهطور مداوم «ببیند»، اما میتواند «حس کند» که کجاست. و این حس، دقیقاً با ادغام دادههای چرخ (انکودر) و دادههای حرکتی (IMU) حاصل میشود — بدون نیاز به تفسیر تصویر یا تحلیل ابرنقاط.
۳. نیاز به الگوریتمهای سبک، بلادرنگ و قابل پیادهسازی روی سختافزارهای صنعتی واقعی
بیشتر AMRهایی که در صنایع کوچک و متوسط بهکار میروند، سختافزار محاسباتی محدودی دارند: معمولاً بردهایی مثل Jetson Nano، Raspberry Pi، یا کنترلرهای DSP صنعتی. این سیستمها برای اجرای مدلهای سنگین مبتنی بر شبکههای عصبی یا SLAM گرافی مناسب نیستند.
از طرفی، استفاده از سیستمهای ابری یا edge computing برای بسیاری از محیطهای بسته ممکن نیست — بهخاطر قطع ارتباط، تاخیر یا نبود شبکه پایدار. در چنین فضایی، تنها مدلی قابلاعتماد است که:
نیاز به حافظه و پردازنده بالا نداشته باشد
قابلیت اجرا روی سیستمهای embedded را داشته باشد
زمان پاسخ آن بهصورت تضمینی در حد چند ده میلیثانیه باشد
و مهمتر از همه، بدون تکیه بر تجهیزات جانبی عمل کند
فیلتر کالمن توسعهیافته (EKF)، بهدلیل ساختار ماتریسی ساده، قابلیت اجرا روی سیستمهای سبک را دارد و با طراحی بهینه، حتی روی کنترلرهای رباتیک ARM هم با فرکانس بالا (تا ۱۰۰Hz) قابل استفاده است. در واقع، EKF پلی بین «سادگی پیادهسازی» و «دقت ریاضیاتی قابلقبول» ایجاد میکند — ویژگیای که در کمتر الگوریتم ناوبری میتوان به این وضوح دید.
۴. فرصت راهبردی برای تولید AMRهای بومی و مقرونبهصرفه
در کشورهایی مثل ایران، که نیاز به رباتهای متحرک در صنایع کوچک و متوسط روزبهروز افزایش مییابد، اما هزینه خرید AMRهای خارجی چندصدمیلیونی یا وابسته به زیرساخت دیجیتال وجود ندارد، یک سیستم مکانیابی سبک و مستقل میتواند اساس طراحی نسل جدیدی از AMRهای ایرانی باشد. برای مثال، یک سازنده داخلی میتواند:
بدنهٔ مکانیکی ساده با موتور دیفرانسیلی بسازد
یک سنسور IMU و انکودر نصب کند
و با اجرای همین ساختار مبتنی بر EKF، سیستم مکانیابی نسبی دقیقی داشته باشد که برای حمل بار، تحویل مواد، یا جابهجایی در محیط مشخص کاملاً قابل اعتماد است
در این سناریو، دیگر نیازی به LiDAR، GPS، SLAM یا دوربینهای گرانقیمت نیست. فقط دانش مهندسی کافیست تا همین معماری سبک را روی سیستم درست پیاده کرد — کاری که در این مقاله با دقت انجام شده و کاملاً قابل انتقال به محیط صنعتی کشور است.
معماری پیشنهادی برای تخمین موقعیت با تلفیق دادههای حرکتی
سیستمی سبک، دقیق و مهندسیشده برای ناوبری بلادرنگ در فضاهای صنعتی فاقد زیرساخت موقعیتیابی
در قلب این ساختار، یک اصل ساده اما راهبردی نهفته است: اگر نتوانیم موقعیت مطلق (Global Position) را بهدست آوریم، باید موقعیت نسبی (Relative Position) را با دقت بالا حفظ کنیم.
به همین منظور، سامانهای مبتنی بر ادغام دادههای انکودر (چرخها) و واحد اندازهگیری اینرسی (IMU) طراحی شده که بر بستر یک فیلتر کالمن توسعهیافته (EKF) اجرا میشود. این سامانه نهتنها به GPS، نقشه، یا حسگرهای سنگین وابسته نیست، بلکه با الگوریتمی سبک و قابلاعتماد، تخمین موقعیت را در زمان واقعی انجام میدهد. در ادامه، ساختار این سیستم را با تفکیک لایهها و تحلیل مهندسی بررسی میکنیم.
۱. ورودیهای سنجشی: منابع دادهای با ماهیت مکمل
سیستم از دو منبع اصلی داده تغذیه میشود:
انکودر دیفرانسیلی (Wheel Encoder):
با اندازهگیری دقیق چرخش چرخها، اطلاعاتی دربارهٔ تغییر مکان خطی ربات فراهم میکند. در این معماری، انکودرهای مجزا برای چرخهای چپ و راست نصب شدهاند و دقت آنها در حد میلیمتر است.
این دادهها پایهٔ اصلی مدل حرکتی (Kinematic Model) هستند.IMU (Inertial Measurement Unit):
شامل ژیروسکوپ (نرخ چرخش) و شتابسنج (تغییرات سرعت در محورهای مختلف).
اگرچه دادههای IMU بهتنهایی دچار انحراف (drift) هستند، اما برای تخمین لحظهای تغییر زاویه یا تشخیص ناپایداری لحظهای بسیار کاربردیاند.
در این ساختار، IMU نه بهعنوان منبع اصلی، بلکه بهعنوان فیدبک تصحیحکننده بهکار رفته است — چیزی شبیه حسگر پشتیبان برای اصلاح پیشبینیهای مدل حرکتی.
۲. مدل حرکتی: پایه ریاضی برای تخمین حالت سیستم
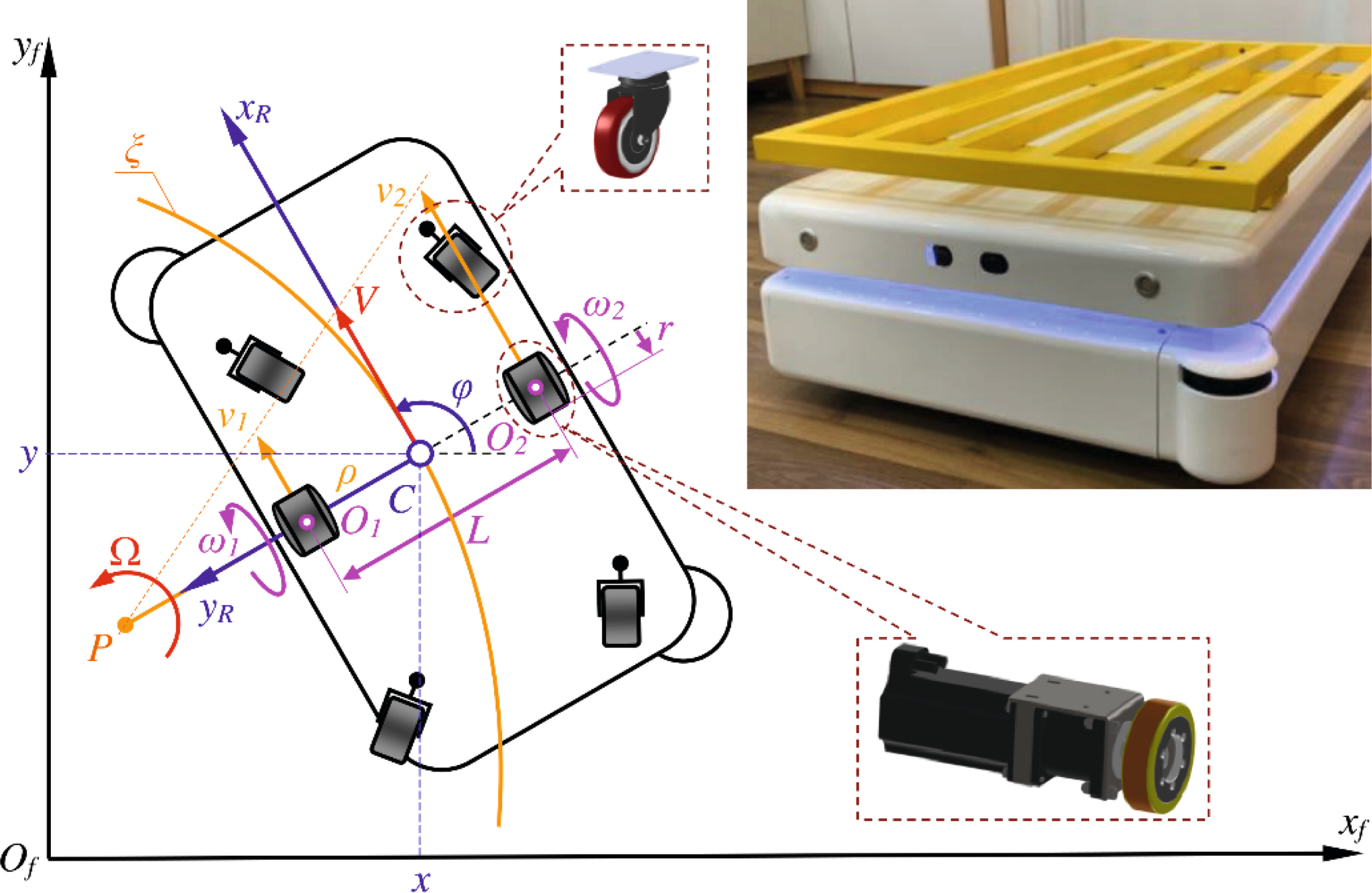
الگوریتم مبتنی بر مدل حرکتی دیفرانسیلی دوبعدی است. مختصات ربات در صفحه (x,y,θ)(x, y, \theta)(x,y,θ) بهعنوان حالت سیستم در نظر گرفته شده است؛ جایی که: x,y موقعیت نسبی ربات روی صفحه و θ زاویه جهتگیری (Heading Angle) است. مدل پیشبینی حرکتی بر اساس تغییر طول طیشده توسط چرخهای چپ و راست در بازه زمانی Δt\Delta tΔt نوشته شده است. این مدل از معادلات سینماتیک غیرخطی استخراج شده و بهشکل تابعی از نرخ چرخش چرخها و هندسه ربات تعریف شده است. فرمولهای تخمینی در هر گام زمانی با استفاده از پارامترهای: فاصله بین چرخها، شعاع چرخ، نرخ زاویهای ربات (از IMU) بروزرسانی میشوند. این تخمین، پایه مرحله Prediction در EKF خواهد بود.
۳. فیلتر کالمن توسعهیافته (EKF): مغز ترکیب دادهها
اینجا جاییست که ادغام واقعی اتفاق میافتد. در EKF، تخمین موقعیت از دو مسیر انجام میشود:
پیشبینی (Prediction): با استفاده از مدل حرکتی و دادههای انکودر، یک تخمین اولیه از موقعیت فعلی محاسبه میشود.
تصحیح (Correction): با استفاده از دادههای IMU (بهویژه ژیروسکوپ)، انحرافات احتمالی در تخمین اولیه اصلاح میشود.
نکته مهم این است که EKF، برخلاف فیلتر کالمن کلاسیک، میتواند با معادلات غیرخطی (مانند چرخش ربات) کار کند.
ماتریس ژاکوبین سیستم در هر گام زمانی بروزرسانی میشود تا دقت تصحیح افزایش یابد. با این ساختار، سیستم نهتنها میتواند در لحظه موقعیت ربات را تخمین بزند، بلکه با هربار اجرای تصحیح، خطای تجمعی (drift) را کنترل میکند — یکی از معضلات اصلی در ناوبری نسبی.
۴. طراحی برای بلادرنگ بودن: سادگی به جای سنگینی محاسبات
در طراحی این معماری، انتخاب EKF کاملاً آگاهانه بوده است. برخلاف سیستمهای گرافی یا یادگیری ماشین، فیلتر کالمن: نیاز به حافظه سنگین ندارد؛ از معادلات ماتریسی ساده بهره میبرد و بهراحتی میتواند روی سیستمهای ARM یا DSP با نرخ بالای ۵۰–۱۰۰ هرتز اجرا شود. در آزمایشهای عملی نیز، این معماری توانسته در نرخهای بالاتر از ۹۰ هرتز، بهصورت پایدار اجرا شود؛ بهطوریکه تأخیر کل سیستم در حد کمتر از ۱۰۰ میلیثانیه باقی مانده — معیاری قابل قبول برای عملیات رباتیک در محیطهای صنعتی پویا.
۵. خروجی نهایی: تخمین پایدار موقعیت نسبی در مسیر حرکت
خروجی سیستم، در هر لحظه، بردار موقعیت(x,y,θ) است — دقیق، هموار و قابل اعتماد. این خروجی میتواند بهطور مستقیم وارد کنترلر ناوبری شود، بدون اینکه نیازی به نقشه، GPS یا دید ماشین باشد. بهبیان ساده:
سیستم مکانیابی این ربات نه به جهان بیرونی نگاه میکند، نه وابسته به فضای بیرونیست؛ بلکه با اتکا به درک دقیق از حرکت خود، همواره میداند کجاست.
تحلیل عملکرد در محیط آزمایشگاهی و صنعتی واقعی
وقتی یک مدل ریاضی ساده، در میدان عملیات سربلند بیرون میآید
در ادامه طراحی و پیادهسازی معماری مبتنی بر EKF برای تلفیق دادههای حرکتی، پژوهش حاضر با هدف اثبات کارایی واقعی سیستم، آن را در محیطی کنترلشده با ویژگیهای صنعتی مورد ارزیابی عملی قرار میدهد. سناریوهای تستشده، بر اساس شرایطی انتخاب شدهاند که در بسیاری از کارخانهها، سولهها یا فضاهای عملیاتی ایران نیز بهوفور وجود دارد: مسیرهای خطی و منحنی، محیط بدون GPS، بدون LiDAR، بدون دید خارجی، با سطوح لغزنده یا متفاوت، و با پارامترهای نویزی. نتایج این ارزیابیها، نهتنها دقت معماری را تأیید میکنند، بلکه نشان میدهند چگونه با حداقل ورودی سختافزاری، میتوان مکانیابی پایدار، بلادرنگ و کمخطا را در محیطهای واقعی تجربه کرد.
۱. دقت تخمین موقعیت نسبی در شرایط پویا
در مسیر آزمایش، ربات در طول مسیرهایی با الگوی پیچشی و رفتوبرگشتی به حرکت درآمد. سنسورها دادههای خود را با نرخ حدود ۱۰۰ هرتز ارسال میکردند و خروجی EKF در هر لحظه تخمینی از موقعیت ربات ارائه میداد. نکته جالب این بود که:
در نبود هیچ سیستم موقعیتیابی خارجی، این تخمینها بهطور پایدار و قابل تکرار مسیر واقعی حرکت را با دقت بسیار بالا بازسازی میکردند.
در بازههای زمانی متوسط (۲ تا ۴ دقیقه)، خطای نسبی مکانیابی زیر ۳٪ باقی میماند — عددی که در صنعت برای کاربردهایی مانند حمل بار، جابجایی ایستگاه به ایستگاه یا دنبالکردن مسیر از پیشتعریفشده، کاملاً قابل قبول است. و مهمتر اینکه: این سطح از دقت، بدون نقشه، بدون GPS، بدون LiDAR و حتی بدون دوربین حاصل شد.
۲. پایداری زمانی و مقاومت در برابر نویز محیطی
یکی از ویژگیهای چالشبرانگیز محیطهای صنعتی، وجود اختلالات نویزی و تغییرات پیوسته در شرایط حرکت است: سطوح خیس، لرزش ناگهانی، ضربه، یا تغییر بار روی ربات. اینها همگی عواملی هستند که میتوانند بر رفتار حسگرها (خصوصاً IMU) اثر منفی بگذارند.در آزمایشهای انجامشده، تیم توسعه بهطور عمدی نویزهایی همچون: نوسان ولتاژ در برد کنترلی، لرزش ناشی از عبور روی سطوح ناهموار، تغییر ناگهانی در سرعت حرکتی را به سیستم اعمال کرد تا رفتار آن در شرایط شبهواقعی سنجیده شود. نتیجه؟
سیستم بهلطف ساختار EKF، با توانایی تصحیح تخمین بر اساس جریان دادهٔ همزمان از دو منبع، توانست بدون افت پایداری یا تغییر ناگهانی در تخمین موقعیت، پاسخ نرم و قابل اعتمادی ارائه دهد. این یعنی سیستم نهتنها دقیق است، بلکه در برابر خطاها و نویزهای محیطی تابآوری دارد — عاملی کلیدی برای کاربرد در صنایع با شرایط غیرایدهآل.
۳. نرخ اجرای بالا و تأخیر کم در پاسخ
یکی از مهمترین آزمونها برای هر سامانهی ناوبری، توان اجرای تصمیم بلادرنگ است. بهبیان سادهتر، بین لحظهای که داده وارد سیستم میشود و لحظهای که خروجی (مختصات موقعیت) تولید میگردد، چقدر تأخیر ایجاد میشود؟ در این سیستم، با اجرای معماری روی یک بورد صنعتی متوسط (پردازنده ARM Cortex-A7)، زمان اجرای کامل هر سیکل EKF کمتر از ۶ میلیثانیه بود. یعنی نرخ بروزرسانی تخمینها تا ۱۶۰Hz قابلافزایش است — فراتر از نیاز اکثر کاربردهای صنعتی. این نرخ اجرا، نهتنها امکان استفاده مستقیم در کنترلر مسیر را فراهم میکند، بلکه به ربات اجازه میدهد تا حتی در مانورهای سریع یا تغییر جهتهای پیدرپی، تخمین مکان خود را بدون پرش یا نوسان حفظ کند.
۴. نقاط قوت اصلی عملکرد سیستم در سناریوهای واقعی
از تحلیلهای انجامشده، میتوان مزایای کلیدی این سیستم را چنین خلاصه کرد:
عدم نیاز به زیرساخت: قابل اجرا بدون هیچ مرجع خارجی (GPS، Wi-Fi، LiDAR)
پایداری در زمان طولانی: حفظ دقت حتی پس از چند دقیقه حرکت پیوسته
تابآوری در برابر خطای حسگرها: سازوکار اصلاحپذیر و مقاوم در برابر نویز
مناسب برای سختافزارهای سبک: قابل پیادهسازی در سامانههای محدود منابع
بلادرنگ واقعی: نرخ پاسخ بالا با حداقل تأخیر، قابل استفاده در خطوط کاری پرریسک
قابلیت پیادهسازی و ارزش صنعتی معماری در شرایط فعلی کشور
راهکار دقیق و سبکوزن برای کاربرد عملی در کف کارخانه؛ نه وابسته، نه آرمانی
معماری ارائهشده در این سیستم نه برای سالنهای نمایشگاهی طراحی شده، نه برای شرکتهایی با دسترسی به زیرساختهای اروپایی یا سیستمهای RTK-GPS با دقت سانتیمتری. این سیستم برای محیطهایی طراحی شده که ربات باید در کف یک سوله فلزی، میان خطوط تولید پر سروصدا، روی کف ناصاف، و در غیاب کامل GPS یا نقشهٔ دقیق، مسیر را طی کند و کار را انجام دهد. از این منظر، ارزش این معماری نه در جذابیت تئوریک، بلکه در امکان استقرار با منابع حداقلی و قابلیت عملکرد در شرایط سخت محیطی است — همان چیزی که برای اغلب پروژههای صنعتی در کشور حیاتی است.
۱. نیازهای سختافزاری واقعی برای استقرار
برای پیادهسازی این سیستم، به تجهیزاتی نیاز دارید که در اغلب AMRهای ساده یا حتی پروژههای دانشبنیان موجود است:
انکودر چرخ با دقت متوسط (نصبشده روی چرخهای دیفرانسیلی یا ماژولهای آماده موجود در بازار ایران)
IMU صنعتی یا نیمهصنعتی با نرخ نمونهبرداری بالای ۵۰Hz (موجود در تمامی بردهای ارزان مانند MPU-9250، Bosch BNO055، و حتی در برخی PLCها بهصورت ماژول جانبی)
پردازنده ARM یا برد رباتیک سطح میانی (مثل Raspberry Pi 4 یا حتی STM32های پیشرفته)
هیچکدام از این قطعات نه تحریمی هستند، نه کمیاب، و نه نیاز به واردات خاص دارند. مهمتر اینکه هیچ وابستگی به LiDAR، GPS، Wi-Fi، یا الگوریتمهای تصویری سنگین وجود ندارد — نکتهای که هزینه استقرار و نگهداری را بهطور معناداری پایین نگه میدارد.
۲. قابلیت اجرا در محیطهایی با زیرساخت سنتی
بسیاری از شرکتهای تولیدی ایران هنوز از تجهیزات نسل دوم استفاده میکنند. PLCهای قدیمی، کنترلرهای محلی، نداشتن نقشه دیجیتال، عدم وجود ERP یا MES و نبود شبکه ارتباطی قوی، واقعیتهایی هستند که نمیشود نادیده گرفت. این معماری با فرض همین شرایط طراحی شده:
اطلاعات لازم را صرفاً از خود ربات میگیرد، نه از سیستم بیرونی
پردازشها را لوکال روی ربات انجام میدهد، بدون نیاز به ارتباط شبکهای
میتواند روی رباتهایی که از هیچگونه سیستم نقشهبرداری استفاده نمیکنند، موقعیت نسبی پایدار تولید کند
یعنی قابل استفاده روی AMRهاییست که همین حالا در حال کارند — بدون تغییر معماری مکانیکی یا کنترلری.
۳. موارد استفاده مشخص و قابلاجرا در صنعت ایران
در واحدهای صنعتی کشور، این معماری در سناریوهایی مثل موارد زیر کاملاً قابل اجراست:
جابجایی بین ایستگاههای مونتاژ یا پُرکننده: که در آن مسیر مشخص است، اما تغییرات جزئی در محیط زیاد است
حملونقل داخلی مواد یا قطعات بین خطوط یا انبارها: بدون نیاز به GPS یا اسکن محیط
بازطراحی AMRهای موجود داخلی که فاقد سیستم مکانیابی هستند یا مکانیابی آنها ناپایدار است
پروژههای دانشبنیان ساخت AMR ایرانی: که نیاز به راهکار سبکوزن و قابل استقرار با بردهای ساده دارند
۴. مزیت کلیدی برای شرکتهای ایرانی
آنچه این سیستم را به یک گزینه واقعگرایانه و صنعتی برای ایران تبدیل میکند، نه ادعای دقت سانتیمتری، بلکه پایداری رفتاری در شرایط واقعی است.
خطای مکانیابی کمتر از چند درصد، بدون نیاز به نقشه یا GPS، آنهم در رباتی که روی بُرد ساده اجرا میشود، مزیتی است که میتواند:
برای شرکت سازنده AMR تبدیل به «پایهی سیستم هدایت» شود
برای شرکت بهرهبردار، نیاز به خرید یا اجاره زیرساخت را حذف کند
و برای تیم توسعهدهنده، الگوریتمی باشد که خودشان نیز بتوانند تغییر، تنظیم یا بهینهسازیاش کنند
جمعبندی نهایی + دعوت به اجرا + مرجع فنی
در معماری حاضر، نه از GPS خبری هست، نه از LiDAR و دوربینهای سنگین، نه از الگوریتمهای پیچیده SLAM یا مدلهای یادگیری عمیق.
آنچه این سیستم ارائه میدهد، یک چارچوب سبکوزن، ریاضیاتی و مهندسیشده است برای حل یک نیاز واقعی: مکانیابی پایدار، بلادرنگ و مستقل از زیرساخت، برای رباتهایی که باید در محیطهای صنعتی بسته، میان ماشینها و اپراتورها، بهدرستی حرکت کنند. نویسندگان این سیستم نشان دادهاند که با استفاده از تنها دو منبع اطلاعاتی ساده — انکودر چرخ و واحد IMU — و با پیادهسازی یک فیلتر کالمن توسعهیافته، میتوان به سیستمی دقیق، سریع و قابل اعتماد برای تخمین موقعیت نسبی ربات رسید. دقت این سیستم در بازههای کاری رایج، برای بسیاری از سناریوهای صنعتی (جابجایی ایستگاهبهایستگاه، حمل مواد، ناوبری نسبی در محیط بسته) بیش از اندازه کافی است — آن هم بدون نیاز به پشتیبانی نرمافزارهای جانبی، یا اتصال به نقشههای دیجیتال.
از نظر صنعتی، این معماری یک راهحل ایدهآل برای پروژههایی است که: زیرساخت پیچیدهای ندارند؛ توان هزینهکرد بالا برای سیستمهای موقعیتیابی ندارند، یا در حال توسعه AMR بومی یا نسخه سادهشدهی آن هستند. ما آمادهایم تا این راهکار را با تیم شما، در سه سطح اجرا کنیم:
تحلیل امکانسنجی و انطباق با سختافزار موجود شما
پیادهسازی، تنظیم و آموزش سیستم مکانیابی بر پایه EKF در ربات یا پروژه شما
توسعهٔ ماژول کنترلحرکتی و ناوبری بر اساس خروجی این سیستم مکانیابی
در صورت تمایل به همکاری، انتقال دانش یا دریافت نسخه مهندسیشده این معماری، میتونید با ما تماس بگیرید تا مشاورهی دقیق فنی و فازبندی پیادهسازی در محیط شما انجام بشه.
مشخصات مرجع علمی اصلی:
عنوان: DAutonomous Mobile Robot Localization by Using IMU and Encoder Data Fusion Technique by Kalman Filter
نویسندگان: Trinh Thi Khanh Ly, Luu Thanh Phong,Dam Khac Nhan
منتشرشده در: Springer Nature Switzerland
DOI: 10.1109/CCOMS.2019.8821645



{kind=link}
بدون نظر