

معماری هوشمند برای نسل جدید رباتهای هماهنگ: تحلیل جامع سیستمهای MARS
در دههی اخیر، تحولات فناورانه در حوزهی اتوماسیون صنعتی و رباتیک هوشمند، مرزهای سنتی تولید و لجستیک را درنوردیده است. دیگر رباتها بهعنوان ماشینهایی با عملکرد ایستا و وظایف از پیشتعریفشده شناخته نمیشوند؛ بلکه تبدیل به موجوداتی هوشمند، ارتباطپذیر و خودسازمانده شدهاند که میتوانند در قالب یک اکوسیستم هماهنگ با یکدیگر همکاری کنند. در قلب این تحول، مفهوم جدیدی شکل گرفته که با عنوان سیستمهای چندعاملی رباتهای متحرک (Multi-Agent Mobile Robot Systems – MARS) شناخته میشود؛ سامانههایی که در آنها دهها یا صدها ربات مستقل، در عین داشتن استقلال عملیاتی، در راستای هدفی مشترک و با سازوکار تصمیمگیری جمعی عمل میکنند.
برای درک بهتر اهمیت این تحول، کافی است نگاهی به رباتهای حمل بار و ناوگانهای خودران در انبارهای هوشمند بیندازیم. در چنین محیطهایی، دیگر یک ربات منفرد مسئول انجام کل مأموریت نیست؛ بلکه گروهی از رباتها با تقسیم وظایف، هماهنگی حرکتی و تبادل داده، فرآیند حمل، بارگذاری، و مسیریابی را بهصورت همزمان و بهینه انجام میدهند. هر ربات با بهرهگیری از حسگرهای خود، وضعیت محیط اطراف را درک میکند، تصمیم میگیرد که چگونه با دیگر رباتها تعامل کند و در نهایت با هدف کاهش زمان مأموریت، جلوگیری از برخورد و صرفهجویی در انرژی حرکت میکند. این همان مفهوم هوش جمعی (Swarm Intelligence) در مقیاس صنعتی است؛ هوشی که از همکاری چندین واحد ساده، یک رفتار کلان پیچیده و هدفمند به وجود میآورد.
سیستمهای MARS را میتوان ترکیبی از دو شاخهی علمی بزرگ دانست: سیستمهای چندعاملی (Multi-Agent Systems – MAS) در علم هوش مصنوعی، و سیستمهای چندرباتی (Multi-Robot Systems – MRS) در مهندسی رباتیک. MAS به مطالعهی تعامل میان عاملهای هوشمند میپردازد که میتوانند تصمیم بگیرند، یاد بگیرند و ارتباط برقرار کنند. در مقابل، MRS به طراحی و کنترل گروهی از رباتهای فیزیکی تمرکز دارد که باید در محیط واقعی با محدودیتهای فیزیکی، انرژی و ارتباط روبهرو شوند. ادغام این دو مفهوم در قالب MARS، مسیری را برای توسعهی نسل جدیدی از رباتهای صنعتی هموار کرده است که نهتنها از نظر سختافزار قدرتمندترند، بلکه از نظر نرمافزار، تصمیمگیری و همکاری نیز هوشمندانهتر عمل میکنند.
در صنایع امروزی، کارایی و انعطافپذیری دو شاخص کلیدی در رقابت جهانی محسوب میشوند. شرکتهایی که میتوانند زنجیرهی تأمین خود را با کمترین زمان توقف و بیشترین هماهنگی میان تجهیزات اجرا کنند، به برتری پایدار دست مییابند. MARS در این زمینه بهعنوان یک تحول بنیادین در مدیریت عملیات رباتیک شناخته میشود. برای مثال، در یک کارخانهی خودروسازی مدرن، دهها ربات باید قطعات را از خطوط مختلف جمعآوری کرده و بهصورت هماهنگ به ایستگاههای مونتاژ برسانند. اگر کنترل این رباتها متمرکز و وابسته به یک سرور مرکزی باشد، کوچکترین خطا یا تأخیر میتواند کل فرایند را متوقف کند. اما در یک سیستم چندعاملی، رباتها بدون نیاز به فرمان مرکزی، از طریق الگوریتمهای اجماع و ارتباط همتابههمتا (Peer-to-Peer) با یکدیگر هماهنگ میشوند. نتیجه، یک سیستم خودتنظیم و مقاوم است که میتواند در برابر خرابیها یا تغییرات محیطی واکنش فوری نشان دهد.
در مقالهی مروری مورد بررسی، نویسندگان با تحلیل بیش از صد پژوهش علمی بین سالهای ۲۰۱۷ تا ۲۰۲۱، تصویری جامع از ساختارها، الگوریتمها، کاربردها و چالشهای کلیدی سیستمهای MARS ارائه کردهاند. تمرکز آنها بر ترکیب قابلیتهای حسگری، ارتباطی و تصمیمگیری چندعامل در محیطهای واقعی است. آنچه این پژوهش را متمایز میسازد، رویکرد میانرشتهای آن است؛ جایی که مفاهیم تئوری کنترل، یادگیری ماشین، مخابرات، و مهندسی نرمافزار در کنار هم برای ایجاد یک معماری هوشمند چندرباتی قرار گرفتهاند.
از منظر صنعتی، MARS پاسخی است به نیازهای روبهرشد در لجستیک هوشمند، تولید انعطافپذیر، حملونقل خودران و سیستمهای نظارتی گسترده. در آیندهای نهچندان دور، انبارها، بنادر، مزارع و حتی شهرها به جای مدیریت صدها دستگاه جداگانه، توسط ناوگانهایی از رباتهای هماهنگ کنترل خواهند شد؛ رباتهایی که بدون دخالت انسان، تقسیم وظایف میکنند، دادهها را به اشتراک میگذارند و در زمان واقعی تصمیم میگیرند. این همان چشماندازی است که مقالهی حاضر به روشنی ترسیم میکند: حرکت از رباتهای مستقل به اکوسیستمهای هوشمند هماهنگ.
چالشهای موجود در سیستمهای چندعاملی رباتهای متحرک (MARS)
اگرچه سیستمهای چندعاملی رباتهای متحرک بهعنوان ستون فقرات آیندهی صنعت هوشمند شناخته میشوند، اما دستیابی به هماهنگی پایدار، خودمختاری مطمئن و مقیاسپذیری واقعی در چنین سیستمهایی هنوز با چالشهای عمیق علمی، فنی و عملیاتی روبهروست. ماهیت توزیعشدهی MARS، که در ظاهر منبع انعطاف و تابآوری است، در باطن مجموعهای از پیچیدگیهای جدید را به همراه دارد؛ از مشکلات ارتباطی گرفته تا پایداری کنترلی و مصرف انرژی. در ادامه، مهمترین موانع و چالشهایی که مانع گسترش کاربردی MARS در صنایع میشوند، بهصورت تحلیلی مورد بررسی قرار گرفتهاند.
۱. چالش ارتباط و هماهنگی در محیطهای توزیعشده
در سیستمهای MARS، ارتباط همان ستون اصلی همکاری میان رباتهاست. هر ربات باید بهصورت بلادرنگ اطلاعاتی همچون موقعیت، وضعیت انرژی، مسیر حرکتی و وضعیت مأموریت خود را با دیگر اعضا به اشتراک بگذارد. اما در محیطهای صنعتی واقعی، سیگنالهای ارتباطی همواره پایدار نیستند. وجود موانع فلزی، نویزهای الکترومغناطیسی، بازتاب امواج، یا حتی تحرک زیاد رباتها میتواند باعث افت کیفیت ارتباط شود.
از سوی دیگر، با افزایش تعداد عاملها، پهنای باند شبکه و تأخیر در انتقال دادهها به یک مسئلهی بحرانی تبدیل میشود. در این شرایط، الگوریتمهای تصمیمگیری باید بتوانند در غیاب دادههای کامل و حتی با اطلاعات ناقص نیز عملکرد مناسبی داشته باشند. طراحی چنین الگوریتمهایی نیازمند تعادل میان پایداری ارتباط و استقلال تصمیمگیری است — تعادلی که هنوز چالشبرانگیزترین بخش در MARS محسوب میشود.
۲. چالش تصمیمگیری جمعی و تضاد منافع عاملها
در یک سیستم چندعاملی، تصمیمگیری تنها به معنای انتخاب مسیر یا سرعت نیست؛ بلکه شامل تخصیص وظایف، اشتراک منابع و مدیریت اولویتها نیز میشود. زمانیکه چند ربات بهطور همزمان به یک منبع یا مسیر دسترسی دارند، تضاد منافع عاملها (Agent Conflicts) رخ میدهد. برای مثال، در یک ناوگان رباتهای حمل پالت، ممکن است چند ربات برای برداشتن یک پالت خاص رقابت کنند یا مسیر حرکتشان با یکدیگر تداخل داشته باشد.
الگوریتمهای اجماع (Consensus Algorithms) و تصمیمگیری چندعاملی طراحی شدهاند تا چنین تضادهایی را برطرف کنند، اما همواره میان سرعت تصمیمگیری و بهینهبودن تصمیم نهایی تضاد وجود دارد. در کاربردهای صنعتی بلادرنگ، نمیتوان منتظر همگرایی کامل الگوریتمها ماند؛ در حالیکه تصمیمات سریع ولی ناقص نیز میتوانند خطرآفرین باشند. ایجاد توازن میان سرعت، دقت و پایداری تصمیمات جمعی، هنوز یکی از مسائل باز در توسعهی MARS است.
۳. چالش کنترل و پایداری دینامیکی
هر ربات در یک سیستم چندعاملی دارای مدل دینامیکی خاص خود است — جرم، ممان اینرسی، محدودیت موتور، شرایط اصطکاک و غیره. هنگامیکه چند ربات با ویژگیهای متفاوت در یک مأموریت مشترک مشارکت میکنند، کنترل کل سیستم به یک مسئلهی دینامیکی چندلایه و غیرخطی تبدیل میشود. در سیستمهای متمرکز، کنترلکننده مرکزی میتواند تمام پارامترها را بهصورت همزمان تنظیم کند، اما در MARS که ساختار توزیعشده دارد، چنین امکانی وجود ندارد. هر عامل باید کنترل حرکتی خود را بهطور محلی تنظیم کند و در عین حال، رفتار کل سیستم نیز پایدار بماند.
این موضوع چالشی بزرگ برای طراحی کنترلکنندههای مقاوم، تطبیقی و هماهنگ ایجاد کرده است. کوچکترین خطا در تخمین پارامترهای دینامیکی یا تأخیر در ارتباط میتواند باعث نوسان، واگرایی یا حتی برخورد میان رباتها شود. در نتیجه، تحلیل پایداری لیاپانوف توزیعشده و کنترل مشارکتی پایدار از موضوعات داغ تحقیقات کنونی در MARS به شمار میرود.
۴. چالش مصرف انرژی و بهینهسازی منابع
یکی از مشکلات عملی در ناوگانهای چندرباتی، مدیریت انرژی است. هر ربات محدودیت باتری دارد و استفادهی غیربهینه از منابع انرژی میتواند منجر به توقف ناگهانی در میانه مأموریت شود. در سیستمهای متمرکز، شارژدهی یا تعویض باتریها بهصورت برنامهریزیشده انجام میشود، اما در سیستمهای چندعاملی که هر ربات خودمختار است، تصمیم برای مصرف یا صرفهجویی انرژی باید محلی و هوشمندانه باشد.
بهینهسازی توزیعشدهی انرژی یک مسئلهی پیچیده است؛ زیرا هر عامل علاوه بر انجام وظیفهی خود، باید به حفظ پایداری انرژی کل سیستم نیز فکر کند. در این میان، مفهوم Energy-Aware Task Allocation مطرح شده است، یعنی تخصیص مأموریتها بر اساس وضعیت انرژی و موقعیت عاملها. با این حال، مدلسازی دقیق مصرف انرژی و تلفیق آن با الگوریتمهای تصمیمگیری هنوز یکی از موانع جدی در MARS محسوب میشود.
۵. چالش مقیاسپذیری و پیچیدگی محاسباتی
یکی از اهداف اصلی در توسعهی سیستمهای چندعاملی، توانایی عملکرد در مقیاس بزرگ است. در حالی که الگوریتمهای کنونی در محیطهای با تعداد کم ربات عملکرد قابلقبولی دارند، زمانیکه تعداد عاملها از چند ده به چند صد افزایش مییابد، پیچیدگی محاسباتی بهصورت نمایی رشد میکند. در این شرایط، ارتباط مداوم میان تمام عاملها غیرممکن میشود و حتی الگوریتمهای تصمیمگیری ساده نیز به زمان محاسبهی زیادی نیاز پیدا میکنند.
به همین دلیل، تحقیقات اخیر بر طراحی الگوریتمهای محلی و سبک (Lightweight Local Algorithms) تمرکز دارند که هر ربات فقط با همسایگان نزدیک خود تبادل داده کند. با این وجود، اطمینان از همگرایی کل سیستم تنها با تبادل دادههای محلی همچنان یک مسئلهی باز و دشوار است.
۶. چالش امنیت، ایمنی و اعتماد
با افزایش سطح خودمختاری رباتها و حجم ارتباطات میان آنها، خطرات امنیتی نیز افزایش مییابد. یک ربات خرابکار یا نفوذ نرمافزاری میتواند کل شبکه را مختل کند. در سیستمهای صنعتی که در آنها MARS بهصورت مستقیم با فرآیندهای تولید یا حمل مواد در ارتباط است، چنین اتفاقی میتواند خسارتهای مالی و جانی قابلتوجهی ایجاد کند.
علاوه بر امنیت سایبری، ایمنی فیزیکی نیز موضوعی حیاتی است. رباتهای هماهنگ باید طوری طراحی شوند که حتی در صورت خرابی جزئی یا قطع ارتباط، هیچ برخورد فیزیکی با انسان یا دیگر ماشینها رخ ندهد. ایجاد اعتماد در سطح تصمیمگیری جمعی، یعنی اینکه عاملها بتوانند رفتار دیگران را پیشبینی کرده و بر اساس آن تصمیم بگیرند، از اصول بنیادی MARS است.
۷. چالش استانداردسازی و یکپارچگی بینسازمانی
در حال حاضر، شرکتها و پژوهشگاههای مختلف از پلتفرمها، زبانها و پروتکلهای متفاوتی برای توسعهی MARS استفاده میکنند. این تنوع باعث شده ادغام سیستمهای چندعاملی از برندهای مختلف دشوار باشد. نبود استاندارد واحد در پروتکل ارتباطی، فرمت دادهها و مدلهای تصمیمگیری، یکی از موانع تجاریسازی گستردهی MARS محسوب میشود. ایجاد چارچوبهای باز و قابل توسعه مانند ROS-M (Robot Operating System for Multi-Agent Systems) میتواند مسیر همگرایی صنعتی را هموار کند، اما هنوز در مراحل اولیه قرار دارد.
در مجموع، چالشهای MARS را میتوان در سه لایهی کلی طبقهبندی کرد:
۱. لایهی زیرساخت فنی (Communication & Computation)،
۲. لایهی تصمیمگیری و کنترل (Coordination & Consensus)،
۳. لایهی اعتماد و ایمنی (Security & Robustness).
غلبه بر این چالشها، نیازمند همگرایی میان رشتههای رباتیک، مخابرات، یادگیری ماشین و مهندسی نرمافزار است. تنها در چنین شرایطی میتوان انتظار داشت که سیستمهای چندعاملی از مرحلهی آزمایشگاهی فراتر روند و به ستون اصلی عملیات صنعتی و لجستیک جهانی تبدیل شوند.
دیدگاه نوآورانه مقاله و مسیر علمی–صنعتی MARS
در حالیکه پژوهشهای بسیاری در زمینهی رباتهای متحرک یا سیستمهای چندعاملی بهصورت مجزا انجام شدهاند، نوآوری اصلی مقالهی مروری مورد بررسی در آن است که برای نخستین بار، مفهوم سیستمهای چندعاملی رباتهای متحرک (MARS) را نه بهعنوان یک شاخهی فرعی از رباتیک، بلکه بهعنوان یک چارچوب جامع و میانرشتهای برای هماهنگی هوشمند، کنترل توزیعشده و همکاری تصمیمگیرانه میان رباتها معرفی میکند. دیدگاه مقاله این است که MARS دیگر صرفاً یک ابزار فناورانه نیست، بلکه یک معماری سیستماتیک برای سازماندهی رفتار جمعی رباتها در مقیاس صنعتی است — نوعی تفکر کلان که از طبیعت الهام گرفته و از فناوریهای هوش مصنوعی، شبکههای ارتباطی و یادگیری ماشین تغذیه میشود.
در مرکز این دیدگاه، ایدهی خودمختاری در سطح عامل و هماهنگی در سطح کلان قرار دارد. هر ربات در یک سیستم چندعاملی، همانند یک موجود زنده، دارای هدف، ادراک و منطق تصمیمگیری محلی است. اما این استقلال به معنای جدایی از کل نیست؛ بلکه بخشی از یک اکوسیستم هوشمند است که رفتار جمعی آن از تعامل و ارتباط میان عاملها شکل میگیرد. نویسندگان تأکید میکنند که اگرچه خودمختاری محلی کلید انعطافپذیری است، اما تعادل میان استقلال و هماهنگی همان چیزی است که عملکرد پایدار MARS را تضمین میکند.
یکی از رویکردهای نوآورانه در مقاله، بازتعریف مفهوم کنترل از دیدگاه «مرکزگرایی کلاسیک» به «شبکهی هوشمند توزیعشده» است. در سیستمهای رباتیکی سنتی، کنترل مرکزی معمولاً تصمیم نهایی را اتخاذ و به رباتها ابلاغ میکند؛ اما در MARS، کنترل و تصمیمگیری میان عاملها تقسیم میشود و سیستم به شکل طبیعی به سمت خودسازماندهی (Self-Organization) حرکت میکند. این همان نقطهی عطفی است که سیستمهای چندعاملی را از سایر فناوریهای رباتیکی متمایز میسازد — انتقال از فرمانپذیری به رفتار جمعی خودمختار.
از سوی دیگر، مقاله نگاه نوینی به مفهوم هوش توزیعشده (Distributed Intelligence) دارد. در این مدل، هر عامل فقط بخش محدودی از اطلاعات محیط را در اختیار دارد، اما با ترکیب و اشتراک دادهها در سطح کل سیستم، دانشی جمعی شکل میگیرد که بسیار فراتر از تواناییهای یک ربات منفرد است. این همان چیزی است که در طبیعت نیز مشاهده میشود: مورچگان، زنبورها یا پرندگان، هر یک دارای توان ادراکی محدودی هستند، اما از طریق ارتباط ساده و سریع میان خود، میتوانند رفتارهایی فوقالعاده پیچیده و کارآمد از خود نشان دهند. MARS با الهام از این پدیدههای طبیعی، این الگوی هوش ازدحامی (Swarm Intelligence) را در قالب صنعتی و دیجیتال بازآفرینی کرده است.
نوآوری دیگر مقاله، ارائهی چارچوب پنجلایهی عملکردی برای سیستمهای MARS است که بهطور نظاممند از سطح حسگری تا کنترل کلان را پوشش میدهد. در این معماری، لایهی اول شامل حسگرها و ادراک محلی است که دادههای خام از محیط را جمعآوری میکند؛ لایهی دوم تصمیمگیری محلی عاملها را در بر میگیرد؛ لایهی سوم هماهنگی و اجماع بینرباتی را مدیریت میکند؛ لایهی چهارم وظیفهی ارتباطات و اشتراک دادهها را بر عهده دارد؛ و لایهی پنجم به کنترل مرکزی و نظارت سطح بالا اختصاص دارد. این معماری به MARS امکان میدهد تا همزمان انعطاف ساختاری، پایداری عملکرد و قابلیت مقیاسپذیری را حفظ کند. به بیان دیگر، هر لایه دارای استقلال محاسباتی است، اما در عین حال با لایههای دیگر در ارتباطی پویا قرار دارد — مشابه نحوهی عملکرد یک سازمان زنده یا یک شبکهی عصبی توزیعشده.
از منظر صنعتی، این دیدگاه نوآورانه منجر به ایجاد یک مدل عملی برای پیادهسازی MARS در کاربردهای واقعی شده است. در بخش لجستیک و انبارداری، این معماری به رباتهای حمل پالت اجازه میدهد بهصورت گروهی کار کنند؛ یعنی اگر یک ربات درگیر مانع شود، بلافاصله همتایانش تصمیمگیری جدیدی برای تقسیم وظایف انجام میدهند. در تولید صنعتی، MARS میتواند کنترل خطوط مونتاژ را بین چند ربات تقسیم کند تا هیچ گلوگاه یا نقطهی شکست مرکزی وجود نداشته باشد. در حوزهی حملونقل خودران، همین مفهوم به خودروها و وسایل نقلیهی خودکار اجازه میدهد در قالب یک شبکهی ارتباطی منسجم، تصمیمات جمعی بگیرند و ترافیک را بهصورت خودتنظیم مدیریت کنند.
نویسندگان همچنین بر تلفیق یادگیری ماشین با تصمیمگیری چندعاملی تأکید کردهاند. آنها بیان میکنند که الگوریتمهای MARS در آینده باید قادر باشند از تجربهی جمعی خود بیاموزند — یعنی هر ربات نهتنها از عملکرد خودش، بلکه از اشتباهات و موفقیتهای همکارانش نیز یاد بگیرد. این مفهوم که با عنوان Cooperative Reinforcement Learning شناخته میشود، کلید رسیدن به نسل جدیدی از MARS است که نهتنها هماهنگ عمل میکنند، بلکه بهصورت جمعی تکامل مییابند.
در مجموع، دیدگاه نوآورانهی مقاله بر پایهی سه اصل استوار است:
توزیع تصمیمگیری به جای تمرکزگرایی، برای افزایش تابآوری سیستمها در محیطهای صنعتی پویا.
تکامل جمعی عاملها از طریق اشتراک یادگیری و تجربه، برای ارتقای مداوم کارایی.
ساختار چندلایهی هوشمند برای تضمین تعادل میان استقلال محلی و هماهنگی جهانی.
این نگاه ترکیبی میان فناوری و الهام از طبیعت، MARS را از یک حوزهی تحقیقاتی صرف، به چارچوبی تحولآفرین برای نسل آیندهی رباتهای صنعتی و لجستیکی تبدیل کرده است.
ساختار و روششناسی تحلیلی سیستمهای MARS
سیستمهای چندعاملی رباتهای متحرک (MARS) ذاتاً ساختارهایی چندلایه، پویا و توزیعشده هستند. مقاله با رویکردی جامع، این ساختار را از سه منظر تحلیل میکند: ساختار کنترلی، تعامل عاملها و الگوریتمهای هماهنگی. هدف از این تحلیل، ارائهی چارچوبی است که بتواند رفتار گروهی رباتها را در شرایط واقعی – از ناوبری گروهی گرفته تا تخصیص وظیفه و اجتناب از برخورد – تبیین کند.
۱. ساختار کنترلی: از متمرکز تا توزیعشده
در سطح کلان، MARS را میتوان بر اساس نحوهی تصمیمگیری و تبادل داده به سه نوع اصلی تقسیم کرد: متمرکز (Centralized)، غیرمتمرکز (Decentralized) و هیبریدی (Hybrid).
در مدل متمرکز، یک کنترلکننده یا سرور مرکزی وظیفه دارد تمام اطلاعات مربوط به رباتها را جمعآوری کرده، تصمیمات لازم را بگیرد و دستورات را به هر عامل ارسال کند. این مدل از نظر پیادهسازی سادهتر است و در محیطهای کنترلشده مانند انبارهای کوچک یا خطوط تولید ساختارمند عملکرد خوبی دارد. اما با افزایش تعداد رباتها، حجم دادهها و پیچیدگی ارتباطات، این مدل با مشکلاتی نظیر تأخیر، گلوگاه محاسباتی و نقطهی شکست واحد (Single Point of Failure) روبهرو میشود.
در مقابل، مدل غیرمتمرکز تصمیمگیری را میان عاملها توزیع میکند. هر ربات تنها با همسایگان خود تبادل داده دارد و بر اساس قوانین محلی تصمیم میگیرد. این ساختار موجب افزایش مقیاسپذیری، تابآوری و پایداری در برابر خرابی میشود. برای مثال، در ناوگان رباتهای حمل پالت، اگر یکی از رباتها دچار خطا یا توقف شود، سایرین بدون نیاز به مرکز کنترل، مسیرها و وظایف را بازتنظیم میکنند. البته چالش اصلی این مدل، تضمین همگرایی و هماهنگی سراسری است، زیرا رفتار محلی ممکن است همیشه به تصمیم جمعی مطلوب منجر نشود.
مدل سوم یعنی هیبریدی، ترکیبی از دو ساختار پیشین است. در این مدل، تصمیمات استراتژیک (مانند تخصیص مأموریتها یا نقشهی کلی حرکت) در سطح مرکزی اتخاذ میشوند، در حالیکه اجرای تاکتیکی (مانند اجتناب از مانع و تنظیم مسیر لحظهای) بهصورت توزیعشده انجام میگیرد. این مدل بیشترین سازگاری را برای کاربردهای صنعتی بزرگ دارد، زیرا تعادلی میان کنترل مرکزی و خودمختاری محلی ایجاد میکند.
۲. تعامل عاملها: از همکاری تا رقابت
مقاله بیان میکند که نحوهی تعامل بین رباتها در MARS میتواند در سه دستهی اصلی قرار گیرد: هماهنگ (Cooperative)، مشارکتی (Collaborative) و رقابتی (Competitive).
در حالت هماهنگ، همهی عاملها هدف مشترکی دارند و با اشتراک دادهها برای رسیدن به آن تلاش میکنند. نمونهی کلاسیک آن در ناوبری گروهی یا تشکیل آرایشهای خاص پروازی در رباتهای هوایی است. در حالت مشارکتی، عاملها ممکن است وظایف متفاوتی داشته باشند اما نتایج آنها به هم وابسته است، مانند رباتهای جستوجو و نجات که هرکدام منطقهای جداگانه را پوشش میدهند اما در نهایت باید نقشهای یکپارچه تولید کنند.
اما در حالت رقابتی، عاملها برای منابع مشترک رقابت میکنند — مثل مسیر عبور، ایستگاه شارژ یا پالت خاص در انبار. در این حالت، الگوریتمهای تصمیمگیری باید علاوه بر بهینهسازی عملکرد کل سیستم، عدالت و کارایی فردی را نیز حفظ کنند. مقاله پیشنهاد میکند استفاده از الگوریتمهای مذاکره چندعاملی (Multi-Agent Negotiation Algorithms)، نظریهی بازیها (Game Theory) و الگوریتمهای اجماع (Consensus Algorithms) برای رسیدن به تعادل میان همکاری و رقابت ضروری است.
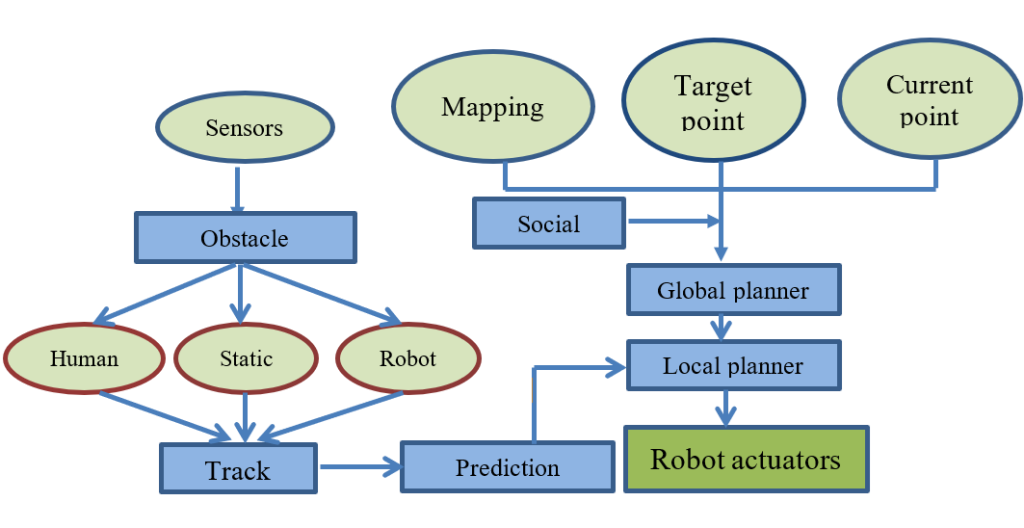
۳. معماری تحلیلی پنجلایه MARS
یکی از نکات کلیدی مقاله، معرفی یک مدل پنجلایهی مرجع برای سیستمهای MARS است که ساختار عملکردی کل سیستم را تبیین میکند. این مدل به شرح زیر است:
لایه حسگری و ادراک (Perception Layer): دادههای محیطی از حسگرها، لیدار، دوربین و GPS جمعآوری میشوند. این لایه با استفاده از الگوریتمهای فیوژن داده، اطلاعاتی یکپارچه از وضعیت محیط تولید میکند.
لایه تصمیمگیری محلی (Local Decision Layer): هر عامل بر اساس دادههای ادراکی تصمیم میگیرد که چه حرکتی انجام دهد یا چگونه با دیگر عاملها تعامل کند.
لایه هماهنگی و اجماع (Coordination Layer): وظیفه دارد تصمیمات محلی را با اهداف جمعی هماهنگ کند. این لایه از پروتکلهای اشتراک داده و الگوریتمهای اجماع برای جلوگیری از تضاد تصمیمها استفاده میکند.
لایه ارتباط و تبادل داده (Communication Layer): مدیریت ارتباطات بیسیم، همگامسازی زمانی و اشتراکگذاری دادهها در این سطح انجام میشود. در محیطهای صنعتی این لایه باید در برابر نویز و قطعی مقاوم باشد.
لایه کنترل مرکزی و نظارت کلان (Supervisory Control Layer): بالاترین سطح سیستم است که وظیفهی نظارت، تحلیل عملکرد و تخصیص مأموریتها را دارد. این لایه در مدلهای هیبریدی با سیستمهای ابری یا سرور مرکزی در ارتباط است.
این ساختار پنجلایه موجب میشود MARS بتواند در شرایط گوناگون صنعتی، از خطوط تولید کارخانه تا ناوگانهای رباتی در انبارها یا مناطق باز، عملکردی پایدار و مقیاسپذیر داشته باشد.
۴. الگوریتمهای کلیدی در هماهنگی چندعاملی
تحلیل مقاله نشان میدهد که چهار خانوادهی الگوریتمی بیشترین نقش را در توسعهی MARS ایفا میکنند:
الگوریتمهای اجماع (Consensus): برای تضمین هماهنگی موقعیت و سرعت بین عاملها.
الگوریتمهای تخصیص وظیفه (Task Allocation): برای تقسیم بهینهی مأموریتها میان رباتها.
الگوریتمهای اجتناب از برخورد (Collision Avoidance): که اغلب بر پایهی فیلدهای پتانسیل مصنوعی یا کنترل پیشبین مدل (MPC) عمل میکنند.
الگوریتمهای یادگیری مشارکتی (Collaborative Learning): برای ارتقای تدریجی عملکرد از طریق اشتراک تجربه میان رباتها.
این الگوریتمها در کنار هم پایهی تصمیمگیری هوشمند MARS را تشکیل میدهند و باعث میشوند که رفتار جمعی سیستم نهتنها ایمن و مؤثر، بلکه در طول زمان یادگیرنده و بهینهتر شود.
۵. نقش هوش مصنوعی در معماری MARS
در نهایت، مقاله تأکید دارد که هوش مصنوعی بهویژه یادگیری عمیق (Deep Learning)، بهسرعت در حال تبدیل شدن به قلب MARS است. از شبکههای عصبی کانولوشنی برای درک محیط گرفته تا شبکههای بازگشتی برای پیشبینی رفتار دیگر عاملها، AI به MARS توانایی «درک، پیشبینی و سازگاری» میدهد. این امر باعث شده سیستمهای چندعاملی از سطح کنترل واکنشی فراتر رفته و به سمت کنترل شناختی (Cognitive Control) حرکت کنند؛ جایی که هر عامل نهفقط از محیط، بلکه از همکاران خود نیز میآموزد.
در مجموع، روششناسی مقاله نشان میدهد که MARS ترکیبی از مهندسی سیستم، نظریهی کنترل، هوش مصنوعی و ارتباطات بلادرنگ است. ساختار چندلایه، تصمیمگیری توزیعشده و یادگیری جمعی، سه ستون اصلی این معماریاند — و همین سه ویژگیاند که آیندهی لجستیک، حمل بار و تولید هوشمند را تعریف خواهند کرد.
کاربردهای صنعتی و سناریوهای واقعی سیستمهای MARS
در دنیای امروز، هر صنعتی که با حملونقل، هماهنگی و تصمیمگیری بلادرنگ سروکار دارد، بهنوعی با مفاهیم MARS گره خورده است. سیستمهای چندعاملی رباتهای متحرک نهتنها در پژوهشهای آزمایشگاهی بلکه در محیطهای واقعی صنعتی نیز به کار گرفته شدهاند و در حال تبدیل شدن به زیرساخت اصلی Industry 4.0 هستند. از خطوط تولید کارخانهها گرفته تا انبارهای خودکار، از لجستیک بندری تا رباتهای شهری، MARS پایهی جدیدی از «هوش جمعی عملیاتی» را برای صنایع به ارمغان آورده است.
۱. انبارداری و لجستیک هوشمند
در انبارهای مدرن که روزانه هزاران محموله جابهجا میشود، استفاده از رباتهای مستقل دیگر کافی نیست. در چنین محیطهایی، نیاز به ناوگانهای هماهنگ از رباتهای حمل پالت (Pallet Robots) وجود دارد که بتوانند بهصورت گروهی، مسیرهای بهینه را انتخاب کرده و در لحظه بارها را بین خود تقسیم کنند. سیستمهای MARS در این سناریو به رباتها اجازه میدهند بر اساس وضعیت ترافیک، موقعیت لحظهای بارها و اولویت سفارشها، تصمیم بگیرند که کدام ربات وظیفهی حمل کدام پالت را بر عهده بگیرد.
برای مثال، در یک انبار توزیع مواد غذایی، چندین AGV (Automated Guided Vehicle) بهصورت چندعاملی عمل میکنند. وقتی یکی از رباتها در مسیر با تأخیر روبهرو شود، عاملهای دیگر بدون نیاز به فرمان مرکزی، وظیفهی او را تقسیم میکنند تا هیچ سفارش معطلی نماند. این سطح از هماهنگی باعث افزایش سرعت، کاهش مصرف انرژی و حذف نقاط گلوگاهی میشود.
در آینده، همین سیستمها قادر خواهند بود با سیستمهای ERP و مدیریت سفارشات انسانی در سطح کلان ادغام شوند و زنجیرهی تأمین را از مرحلهی ورود کالا تا تحویل نهایی کاملاً خودکار کنند — بدون نیاز به دخالت مستقیم انسان.
۲. تولید و مونتاژ خودکار
در کارخانههای تولیدی، بهویژه در صنایع خودرو، هوافضا و الکترونیک، MARS نقش حیاتی در هماهنگی میان رباتهای خط تولید ایفا میکند. در این فضاها، چندین ربات باید بهصورت همزمان و با ترتیب زمانی دقیق عملیات پیچیدهای مانند جوشکاری، مونتاژ یا نصب قطعات را انجام دهند. استفاده از ساختار چندعاملی باعث میشود که رباتها بتوانند وظایف خود را بر اساس وضعیت واقعی خط تولید بازتنظیم کنند.
بهعنوان نمونه، در یک خط مونتاژ خودرو، اگر یکی از بازوهای رباتیک دچار خطا شود، سایر رباتها با استفاده از مکانیسم اجماع، وظیفهی او را بین خود تقسیم کرده و عملیات را بدون توقف ادامه میدهند. این رویکرد نهتنها بهرهوری تولید را افزایش میدهد بلکه میزان خرابی و توقف خط را به حداقل میرساند.
در چنین محیطهایی، لایهی هماهنگی MARS بهعنوان مغز ارتباطی خط عمل میکند؛ اطلاعات سنسورها را از همهی رباتها میگیرد و تصمیمهای جمعی را بهصورت بلادرنگ اتخاذ میکند. همین مکانیسم، پایهی کارخانهی خودمختار (Autonomous Factory) در عصر Industry 4.0 است.
۳. رباتهای بندری و حملونقل دریایی
صنایع بندری و لجستیک دریایی نیز از پیشگامان استفاده از MARS هستند. در بنادر بزرگ، صدها کانتینر باید روزانه بارگیری، تخلیه و جابهجا شوند. استفاده از ناوگانهای چندرباتی در این محیطها باعث میشود که فرآیند حملونقل سریعتر، ایمنتر و قابلپایشتر شود.
رباتهای بندری معمولاً به دو دسته تقسیم میشوند: رباتهای حمل سطحی (AGV) و بازوهای بارگیری خودکار (Gantry Robots). در سیستمهای چندعاملی، این دو دسته بهصورت یک شبکهی هوشمند با یکدیگر همکاری میکنند. AGVها مسیرهای حرکت خود را با بازوهای بارگیری هماهنگ میکنند تا ازدحام و تداخل حرکتی کاهش یابد. در صورت بروز تأخیر در یک بخش، بخش دیگر بهصورت خودکار برنامهی زمانبندی را بهروزرسانی میکند.
این هماهنگی نهتنها بهرهوری عملیاتی را افزایش میدهد بلکه امکان نظارت بلادرنگ بر کل عملیات بندری را فراهم میکند — موضوعی که در لجستیک بینالمللی و حملونقل چندوجهی (Multimodal Transport) اهمیت استراتژیک دارد.
۴. ناوگانهای ربات شهری و خدمات عمومی
یکی دیگر از کاربردهای در حال رشد MARS، در محیطهای شهری است. در شهرهای هوشمند آینده، ناوگانهایی از رباتهای خودران برای خدماتی مانند تحویل بسته، نظافت خیابان، و بازرسی زیرساختها بهصورت هماهنگ عمل خواهند کرد. در چنین سیستمهایی، تصمیمگیری متمرکز غیرممکن است، چون شرایط محیطی دائماً در حال تغییر است. بنابراین، سیستمهای چندعاملی با تصمیمگیری توزیعشده، به هر ربات اجازه میدهند مسیر و وظیفهی خود را بهصورت مستقل تنظیم کند اما در عین حال، رفتار کلی ناوگان هماهنگ بماند.
برای مثال، اگر یک ربات تحویل بسته با مانع یا ترافیک روبهرو شود، سایر رباتها مسیرهای جایگزین را بهصورت گروهی بازپیکربندی میکنند تا شبکهی تحویل متوقف نشود. این نوع همکاری، MARS را به یکی از عناصر اصلی شهرهای هوشمند تبدیل کرده است؛ شهری که در آن هوش جمعی رباتها بهجای کنترل انسانی تصمیم میگیرد.
۵. کشاورزی رباتیک و عملیات میدانی
در کشاورزی دقیق (Precision Agriculture)، استفاده از چندین ربات زمینی و هوایی برای کاشت، برداشت و پایش محصولات بهسرعت در حال گسترش است. سیستمهای MARS در این حوزه با هدف کاهش مصرف منابع، افزایش بازدهی و کنترل هوشمند عملیات میدانی به کار گرفته میشوند. هر ربات اطلاعات محیطی مانند رطوبت خاک، رشد گیاه و وضعیت آفتها را جمعآوری میکند و آن را با سایر رباتها به اشتراک میگذارد. سپس شبکهی چندعاملی تصمیم میگیرد که چه ناحیهای نیاز به آبیاری، سمپاشی یا برداشت دارد.
در مزارع بزرگ، این همکاری چندرباتی موجب میشود که همهی عملیات کشاورزی بهصورت بهینه و همزمان انجام شود. در واقع، MARS در کشاورزی همان نقشی را دارد که سیستم کنترل ترافیک در یک شهر هوشمند ایفا میکند: مدیریت جریان کار میان صدها عامل مستقل، برای دستیابی به بهرهوری کلان.
۶. عملیات نجات، امداد و پایش ایمنی
سیستمهای MARS همچنین در عملیات جستوجو و نجات پس از حوادث طبیعی، پایش مناطق پرخطر و بازرسی تأسیسات صنعتی استفاده میشوند. گروهی از رباتهای زمینی و هوایی میتوانند منطقهای را بهطور خودکار تقسیم کرده و مأموریتهای خود را با حداقل تداخل انجام دهند. یکی از مزیتهای اصلی این سیستمها در چنین کاربردهایی، توانایی عملکرد در محیطهای فاقد زیرساخت ارتباطی است. هر ربات بهصورت محلی دادهها را پردازش میکند و تنها نتایج کلیدی را با دیگران به اشتراک میگذارد، که این امر پایداری ارتباط را در شرایط بحرانی تضمین میکند.
در محیطهایی مانند نیروگاههای هستهای، پالایشگاهها یا معادن زیرزمینی نیز، MARS میتواند مأموریتهای بازرسی و نگهداری را بهصورت کاملاً خودکار انجام دهد؛ بهگونهای که هیچ انسانی در معرض خطر مستقیم قرار نگیرد.
در مجموع، کاربردهای صنعتی MARS را میتوان در سه محور اصلی خلاصه کرد:
افزایش بهرهوری عملیاتی با حذف کنترل مرکزی و استفاده از هماهنگی توزیعشده.
کاهش ریسک انسانی در محیطهای خطرناک یا پرترافیک.
ایجاد زیرساختهای خودسازمانده برای لجستیک، تولید و خدمات شهری آینده.
MARS دیگر صرفاً یک مفهوم تحقیقاتی نیست، بلکه پایهی واقعی دگرگونی صنعت در دههی آینده است؛ جایی که کارخانهها، انبارها و شهرها با زبان رباتهای هماهنگ با یکدیگر سخن خواهند گفت.
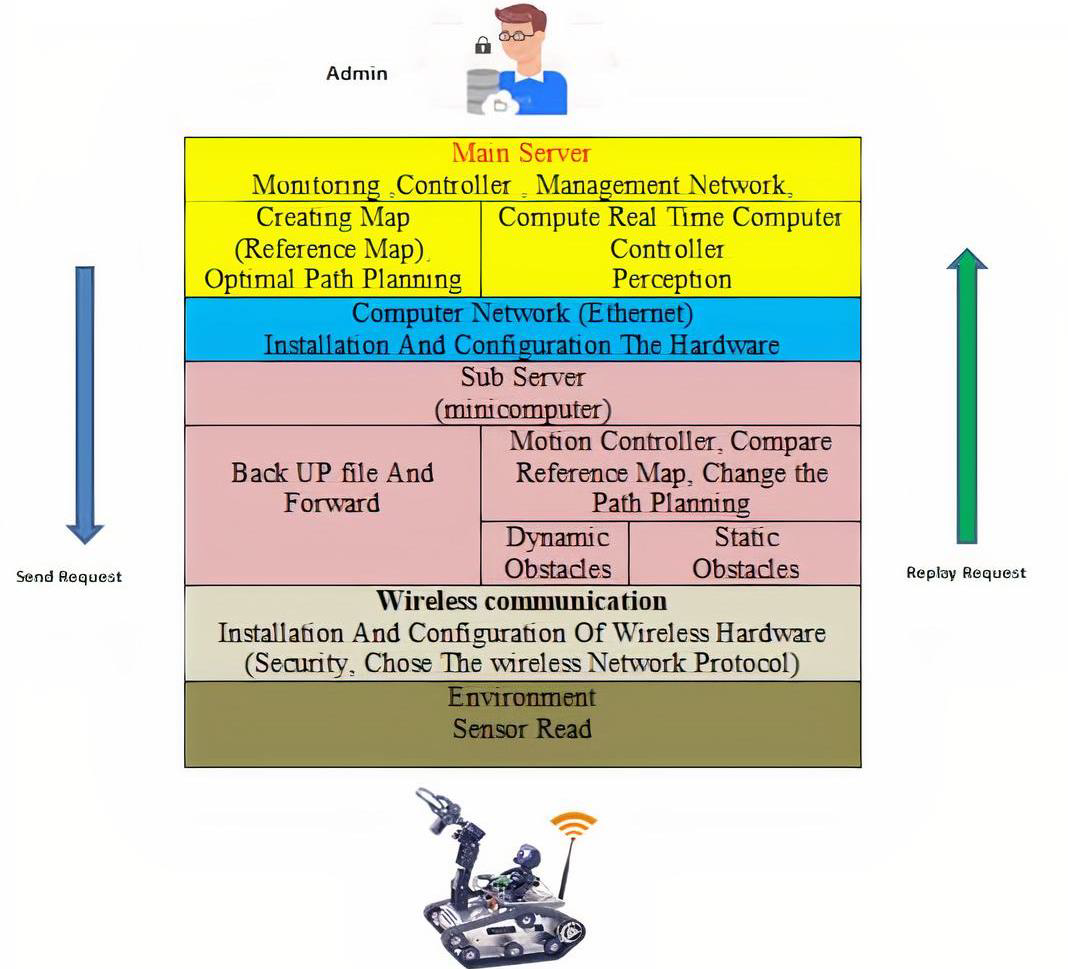
مدل پیشنهادی مقاله – معماری پنجلایه سیستمهای MARS
معماری پیشنهادی مقاله، با طراحی پنج لایهی عملکردی، تلاشی است برای آنکه پیچیدگی ذاتی سیستمهای چندعاملی رباتهای متحرک (MARS) در قالبی نظاممند و قابل اجرا بیان شود. این معماری از پایینترین سطح ادراک تا بالاترین سطح تصمیمگیری جمعی امتداد دارد و هدف آن، ایجاد ارتباطی روان و هوشمند میان حس، تصمیم و عمل در میان دهها یا صدها ربات است. هر لایه نقشی کلیدی در شکلگیری رفتار جمعی دارد؛ از پردازش دادههای محیطی گرفته تا هماهنگی وظایف و کنترل کلان. در ادامه، هر یک از این لایهها با نگاهی تحلیلی و صنعتی بررسی میشود.
در پایهایترین سطح این ساختار، لایهی حسگری و ادراک محیط قرار دارد. این لایه در واقع چشم و گوش سیستم است و تمام دادههای مورد نیاز برای درک وضعیت محیط و خود ربات را فراهم میکند. حسگرهایی مانند LiDAR، دوربینهای RGB-D، GPS، واحدهای IMU، حسگرهای فاصله، جریان موتور و شتابسنج در این سطح فعالیت میکنند. اما آنچه در MARS این لایه را متمایز میسازد، مفهوم ادراک جمعی (Collective Perception) است. برخلاف سیستمهای تکرباتی، دادههای حسگر در MARS محدود به یک ربات نیستند؛ بلکه میان همسایگان به اشتراک گذاشته میشوند تا هر عامل نهتنها موقعیت خود بلکه وضعیت محیط پیرامون گروه را نیز درک کند. برای مثال، در ناوگانهای رباتهای حمل پالت، هر ربات از طریق شبکه بیسیم موقعیت موانع شناساییشده توسط دیگران را دریافت میکند و این اشتراکگذاری سبب میشود که نقشهی ادراکی کل سیستم بهصورت توزیعشده ولی همافزا ساخته شود. نتیجهی این فرآیند، شکلگیری نوعی «هوش محیطی مشترک» است که بهطور مستقیم در بهبود دقت مسیر، کاهش برخورد و افزایش بازده حرکتی نقش دارد.
پس از درک محیط، نوبت به تصمیمگیری محلی میرسد؛ لایهای که میتوان آن را مغز هر عامل در نظر گرفت. در این سطح، هر ربات بر اساس دادههای ادراکی تصمیم میگیرد که چه عملی انجام دهد، از چه مسیری عبور کند، یا با چه سرعتی حرکت نماید. ویژگی بارز این لایه، استقلال تصمیمگیری است؛ یعنی هر عامل باید قادر باشد بدون اتکا به مرکز کنترل، در برابر تغییرات ناگهانی واکنش نشان دهد. برای مثال، زمانیکه ربات در مسیر خود با مانعی متحرک روبهرو میشود، باید مسیر جایگزینی انتخاب کند و در عین حال رفتار خود را با سایر رباتها هماهنگ نگه دارد. این سطح از تصمیمگیری نیازمند الگوریتمهایی است که هم سبک و سریع باشند و هم به اندازه کافی هوشمند تا با دادههای ناقص یا نویزی کار کنند. بسیاری از پیادهسازیهای صنعتی از روشهای مبتنی بر منطق فازی و کنترل پیشبین مدل (MPC) برای تصمیمگیری محلی استفاده میکنند تا بین دقت و سرعت تعادل برقرار شود.
در گام بعدی، لایهی هماهنگی و اجماع قرار دارد که میتوان آن را قلب تپندهی MARS دانست. در این سطح، تصمیمات محلی رباتها باید با اهداف جمعی همسو شوند و از تضاد یا تداخل میان مأموریتها جلوگیری گردد. بهعبارتی، این لایه وظیفه دارد تفکر فردی را به رفتار جمعی تبدیل کند. الگوریتمهای اجماع (Consensus) و تخصیص وظیفه (Task Allocation) در اینجا نقش کلیدی دارند. با استفاده از این الگوریتمها، رباتها در مورد سرعت، جهت، توزیع مأموریتها یا حتی ترتیب انجام کارها با هم توافق میکنند. یکی از چالشهای مهم این لایه، برقراری تعادل میان پویایی محیط و پایداری تصمیمات جمعی است؛ زیرا اگر همگرایی اجماع کند باشد، سیستم دچار تأخیر میشود، و اگر بیش از حد سریع باشد، ممکن است ناپایدار گردد. در محیطهای واقعی مانند انبارهای بزرگ یا بنادر، این لایه با بهرهگیری از قواعدی مشابه ترافیک هوشمند، بهصورت بلادرنگ تصمیمات حرکتی را تنظیم میکند تا جریان حرکت صدها ربات بدون برخورد یا انسداد انجام شود.
در سطح چهارم، لایهی ارتباط و تبادل داده قرار دارد که در حکم شریان حیاتی سیستم است. تمام همکاریها و هماهنگیها در MARS بدون ارتباط مؤثر بیمعنا خواهند بود. در این لایه، دادهها از طریق شبکههای بیسیم با پروتکلهایی مانند Wi-Fi 6، ZigBee، BLE و حتی فناوریهای نسل پنجم (5G) منتقل میشوند. ارتباط در MARS نهتنها باید سریع باشد بلکه باید مقاوم در برابر نویز، قطعی و تداخل محیطی باشد. مقاله بهدرستی بر ضرورت طراحی شبکههای مش (Mesh Networks) تأکید میکند که در آن هر ربات نهفقط گیرنده بلکه بخشی از زیرساخت ارتباطی نیز هست. بدین ترتیب، سیستم نسبت به قطع ارتباط یا خرابی یک عامل مقاوم میشود. علاوه بر این، در این لایه مباحثی چون همگامسازی زمانی دقیق، فشردهسازی هوشمند دادهها و مدیریت پهنای باند اهمیت پیدا میکند تا از ازدحام داده جلوگیری شود.
در بالاترین سطح، لایهی کنترل مرکزی و نظارت کلان قرار دارد که نقش ناظر یا مدیر سیستم را ایفا میکند. این لایه برخلاف سیستمهای متمرکز سنتی، تصمیمگیر اصلی نیست؛ بلکه وظیفهی آن نظارت، تحلیل و برنامهریزی در مقیاس کلان است. دادههای جمعآوریشده از همهی عاملها در این لایه مورد تجزیه و تحلیل قرار میگیرد تا الگوهای عملکرد، میزان بهرهوری و احتمال خطاها شناسایی شود. در محیطهای صنعتی، این بخش معمولاً به زیرساختهای ابری متصل است و میتواند با استفاده از هوش مصنوعی، وظایف پیشبینی خرابی (Predictive Maintenance)، بهینهسازی مسیرهای روزانه و تخصیص مجدد مأموریتها را انجام دهد. در حقیقت، این لایه دیدی کلان از کل سیستم فراهم میکند و تضمین میکند که تصمیمات محلی و جمعی در راستای اهداف کلی سازمان باشند.
ترکیب این پنج لایه در کنار یکدیگر، MARS را به یک سیستم زنده و پویا تبدیل میکند؛ سیستمی که همانقدر که بهصورت محلی واکنش نشان میدهد، در سطح کلان نیز هدفمند و هماهنگ است. لایهی حسگری پایهی ادراک، لایهی تصمیمگیری محلی مغز عملیاتی، لایهی هماهنگی قلب جمعی، لایهی ارتباط ستون فقرات ارتباطی و لایهی کنترل مرکزی مغز راهبردی این اکوسیستم را تشکیل میدهد. نتیجهی این ساختار چندلایه، سیستمی است که در لحظه تصمیم میگیرد، در طول زمان یاد میگیرد و در مقیاس وسیع هماهنگ عمل میکند.
از دیدگاه صنعتی، چنین معماری به رباتها اجازه میدهد در محیطهایی پیچیده و پویا مانند خطوط تولید خودکار، بنادر، فرودگاهها و انبارهای بزرگ بهصورت گروهی فعالیت کنند، بدون آنکه وابسته به اپراتور انسانی یا کنترل مرکزی باشند. همین ویژگی است که معماری پنجلایه را به یکی از کلیدیترین پایههای طراحی در رباتیک نسل آینده و صنعت ۴٫۰ تبدیل کرده است — معماریای که هوش مصنوعی، اینترنت اشیا، یادگیری جمعی و کنترل توزیعشده را در یک چارچوب واحد و منسجم در هم میآمیزد.
جمعبندی استراتژیک و مزیتهای رقابتی سیستمهای MARS
با نگاهی از بالا، آنچه سیستمهای چندعاملی رباتهای متحرک (MARS) به جهان صنعت عرضه کردهاند، تنها یک تحول فناورانه نیست، بلکه یک تغییر پارادایم مدیریتی و عملیاتی است. در واقع، MARS همان نقشی را برای صنعت قرن بیستویکم ایفا میکند که اینترنت برای ارتباطات در قرن بیستم ایفا کرد؛ یعنی ایجاد بستری که در آن اجزای پراکنده بتوانند بهصورت همزمان، هوشمند و خودسازمانده در جهت هدفی مشترک فعالیت کنند. این فناوری از سطح فنی فراتر رفته و به یک زیرساخت فکری و اقتصادی برای آیندهی تولید و لجستیک جهانی تبدیل شده است.
از دید استراتژیک، نخستین و مهمترین مزیت MARS در افزایش تابآوری (Resilience) و کاهش وابستگی به کنترل مرکزی است. در صنایع سنتی، کنترل مرکزی همواره نقطهی ضعف محسوب میشود؛ چرا که خرابی یا حملهی سایبری به یک بخش میتواند کل سیستم را از کار بیندازد. اما در یک سیستم چندعاملی، تصمیمگیری میان عاملها توزیع شده است؛ یعنی اگر یکی از رباتها از کار بیفتد، دیگران بهصورت خودکار وظایف او را بازتوزیع میکنند. این ویژگی در محیطهایی مانند انبارهای عظیم، خطوط تولید خودکار، بنادر و مراکز توزیع کالا، به معنای کاهش توقفهای ناگهانی، افزایش پایداری عملیاتی و حذف نقاط شکست منفرد است — موضوعی که برای سازمانهای بزرگ بهطور مستقیم معادل صرفهجویی در میلیونها دلار هزینه در سال است.
مزیت دوم MARS در افزایش بهرهوری و چابکی عملیاتی نهفته است. در سیستمهای متمرکز، هرگونه تغییر در مأموریتها یا بار کاری نیازمند بازتنظیم نرمافزار یا دخالت انسانی است، در حالیکه در MARS، عاملها بهصورت خودکار بار کاری را بین خود تقسیم میکنند و مسیرها را بازپیکربندی مینمایند. این خاصیت تطبیقپذیری، صنایع را قادر میسازد که به نوسانات تقاضا، خرابی تجهیزات یا تغییرات محیطی در لحظه واکنش نشان دهند. در انبارهای مجهز به رباتهای حمل پالت چندعاملی، وقتی یک مسیر مسدود میشود، سیستم بدون توقف عملیات، مسیر جایگزین را پیدا میکند و وظایف را مجدداً توزیع میکند. این چابکی بلادرنگ، شاخص کلیدی رقابت در عصر Industry 4.0 است.
سومین مزیت بزرگ MARS در مقیاسپذیری و همافزایی جمعی (Emergent Efficiency) خلاصه میشود. در سیستمهای کلاسیک، افزودن رباتهای بیشتر به معنای افزایش پیچیدگی و کاهش کارایی است. اما در MARS، بهدلیل ساختار توزیعشده و قوانین سادهی محلی، اضافه کردن عاملهای جدید نهتنها باعث افت عملکرد نمیشود، بلکه بهرهوری کل سیستم افزایش مییابد. این پدیده در ادبیات علمی با عنوان «هوش ازدحامی مثبت» شناخته میشود و دقیقاً همان چیزی است که در طبیعت نیز مشاهده میکنیم؛ هرچه اعضای کلونی بیشتر شوند، توانایی جمعی آن افزایش مییابد. به همین ترتیب، یک سیستم MARS با ۱۰۰ ربات نه صد برابر، بلکه چندین برابر مؤثرتر از سیستم با ۱۰ ربات عمل میکند، زیرا ظرفیت هماهنگی و یادگیری جمعی آن رشد غیرخطی دارد.
از دید مدیریتی، MARS بستری برای تصمیمگیری دادهمحور و خودکار (Data-Driven Autonomy) فراهم میکند. حجم عظیمی از دادهها از حسگرها، مسیرها، مأموریتها و ارتباطات میان عاملها بهصورت بلادرنگ تولید و تحلیل میشود. این دادهها نهتنها برای کنترل آنی بلکه برای بهبود بلندمدت نیز استفاده میشوند. سیستم میتواند با بهرهگیری از الگوریتمهای یادگیری ماشین، از تجارب گذشته درس بگیرد و سیاستهای هماهنگی خود را بهینه کند. این بدان معناست که MARS برخلاف سیستمهای سنتی که در طول زمان مستهلک میشوند، در طول عمر خود هوشمندتر و کاراتر میشود.
از منظر اقتصادی، پیادهسازی سیستمهای چندعاملی باعث کاهش هزینههای نگهداری، بهینهسازی مصرف انرژی و افزایش طول عمر تجهیزات میشود. چون وظایف میان عاملها تقسیم میشود، هیچ رباتی بیشازحد بارگذاری نمیشود و فرسایش مکانیکی بهصورت طبیعی متعادل میگردد. همچنین ساختار توزیعشدهی کنترل باعث میشود حتی با تجهیزات سادهتر نیز بتوان به عملکردی هوشمند و پایدار رسید، که این امر هزینهی ورود به حوزهی اتوماسیون را برای صنایع کوچکتر نیز کاهش میدهد.
اما شاید مهمترین مزیت رقابتی MARS در سطح کلان، توانایی ادغام با سایر فناوریهای تحولآفرین Industry 4.0 است. این سیستمها میتوانند بهصورت طبیعی با فناوریهایی مانند اینترنت اشیا (IoT)، هوش مصنوعی توزیعشده، رایانش ابری و ارتباطات 5G ترکیب شوند. در واقع، MARS را میتوان ستون میانی میان دنیای فیزیکی رباتها و دنیای مجازی دادهها دانست — پلی که امکان همافزایی میان هوش مصنوعی، تصمیمگیری خودکار و عملیات صنعتی را فراهم میسازد.
در نهایت، MARS از سطح فناوری فراتر میرود و به یک فلسفهی طراحی برای آیندهی سیستمهای خودمختار تبدیل میشود. فلسفهای که بر اصل «اعتماد به همکاری هوشمند» بنا شده است؛ جایی که تصمیمات نه توسط یک مغز واحد بلکه توسط شبکهای از مغزهای کوچک اما هماهنگ اتخاذ میشوند. در جهانی که پیچیدگی روزبهروز افزایش مییابد، این نوع از سازماندهی جمعی نهتنها برای رباتها بلکه برای ساختارهای مدیریتی و اجتماعی نیز الهامبخش است.
بنابراین، از دید استراتژیک، میتوان گفت که MARS آیندهی ناگزیر اتوماسیون است. سازمانهایی که امروز به سمت پیادهسازی آن حرکت میکنند، نهتنها در بهرهوری و امنیت صنعتی پیشرو خواهند بود، بلکه زبان اصلی تعامل ماشینها با یکدیگر را در دنیای دیجیتال آینده خواهند ساخت.
نتیجهگیری
سیستمهای چندعاملی رباتهای متحرک (MARS) امروز دیگر صرفاً یک مفهوم پژوهشی یا چارچوب نظری نیستند؛ بلکه در حال تبدیل شدن به زیرساخت عملیاتی نسل آیندهی صنعت، لجستیک و خدمات خودکار هستند. این فناوری، نقطهی اتصال میان هوش مصنوعی، رباتیک، ارتباطات بلادرنگ و مدیریت دادههای توزیعشده است — چهار ستونی که شالودهی عصر Industry 4.0 را تشکیل میدهند. مقالهی مروری مورد بررسی، با نگاهی جامع به پژوهشها و کاربردهای جهانی، نشان داد که MARS از نظر معماری، الگوریتم، و عملکرد، به مرحلهای رسیده است که میتواند جایگزین سیستمهای سنتی متمرکز و غیرقابل مقیاس شود.
نتیجهی اصلی تحلیل این است که قدرت واقعی MARS در همافزایی هوشمند میان عاملها نهفته است. برخلاف رویکردهای قدیمی که یک مرکز تصمیمگیرنده تمام فرمانها را صادر میکرد، در اینجا تصمیمات بهصورت طبیعی میان رباتها توزیع میشود. هر عامل تنها بخشی از اطلاعات را دارد، اما از طریق ارتباط پیوسته با دیگران، تصویری جمعی از کل سیستم شکل میگیرد. این همان چیزی است که در علم کنترل و نظریهی پیچیدگی از آن بهعنوان Emergent Intelligence یا «هوش ظهوریافته» یاد میشود — هوشی که نه در یک ربات، بلکه در تعامل بین آنها زندگی میکند.
تحلیل مقاله نشان میدهد که ترکیب این فلسفهی کنترلی با فناوریهای جدید مانند شبکههای 5G، اینترنت اشیا (IoT) و رایانش ابری (Cloud Robotics)، میتواند زیرساختی واحد برای تمام صنایع مبتنی بر ناوگانهای خودکار فراهم کند. در چنین آیندهای، یک مرکز لجستیک یا کارخانه دیگر از صدها دستگاه مستقل تشکیل نخواهد شد، بلکه از یک موجود زندهی دیجیتال ساخته میشود؛ موجودی که میبیند، میشنود، تصمیم میگیرد و عمل میکند — دقیقاً همان چیزی که معماری پنجلایهی مقاله در قالب مهندسی بیان میکند.
از دید صنعتی، این دستاورد یک پیام کلیدی دارد: سازمانهایی که امروز MARS را در زنجیرهی تأمین، خطوط تولید و مدیریت ناوگان خود پیادهسازی میکنند، در دههی آینده رهبران بلامنازع صنعت خواهند بود. همانطور که کارخانههای قرن بیستم با پذیرش برق و خودکارسازی به امپراتوریهای صنعتی تبدیل شدند، صنایع قرن بیستویکم با پذیرش MARS و کنترل چندعاملی، به پیشروان تحول دیجیتال بدل خواهند شد.
اما این مسیر بدون اقدام عملی ممکن نیست. سازمانها باید از همین امروز برای حرکت به سمت سیستمهای چندعاملی گامهای زیر را آغاز کنند:
ایجاد زیرساخت ارتباطی مطمئن (5G / Wi-Fi 6) برای ارتباط بین رباتها.
طراحی ماژولهای نرمافزاری توزیعشده برای کنترل مستقل عاملها.
بهکارگیری هوش مصنوعی یادگیرنده برای بهبود تصمیمگیری گروهی.
و در نهایت، آموزش نیروی انسانی برای مدیریت اکوسیستمهای رباتی بهجای ماشینهای منفرد.
این تغییر نه فقط فناورانه، بلکه فرهنگی است؛ گذر از «تفکر کنترل مرکزی» به «تفکر اکوسیستمی». همانطور که طبیعت هزاران سال پیش نشان داده است، هوش جمعی همیشه از هوش فردی کاراتر است. صنعت اکنون در آستانهی پذیرش همین قانون طبیعی در قالبی دیجیتال قرار دارد.
در چشمانداز آینده، MARS شالودهی «کارخانههای خودمختار»، «شهرهای خودتنظیم» و «ناوگانهای هوشمند حملونقل» خواهد بود. جهانی که در آن، همکاری میان رباتها نه نتیجهی برنامهنویسی انسان، بلکه حاصل یادگیری و تصمیمگیری خودشان است. این همان نقطهای است که مرز بین فناوری و زندگی هوشمند از میان برداشته میشود — و انسان نقش خود را از اپراتور به طراح اکوسیستمهای هوشمند تغییر میدهد.
دعوت به اقدام
برای مدیران صنعتی، تصمیمگیران فناوری و مراکز تحقیقاتی، زمان آن رسیده است که گامهای جسورانهتری بردارند. MARS نه یک گزینه، بلکه یک ضرورت است. سازمانهایی که زودتر وارد این مسیر شوند، زیرساخت ذهنی و فنی لازم را برای همزیستی با رباتهای هوشمند آینده خواهند داشت. سرمایهگذاری در زیرساخت ارتباطی، تحقیق در هماهنگی توزیعشده و توسعهی الگوریتمهای یادگیری جمعی، مسیر ورود به صنعتی است که در آن «خودمختاری، بهرهوری و پایداری» بهصورت همزمان محقق میشوند. آینده نه با رباتهای سریعتر، بلکه با رباتهایی که با هم فکر میکنند ساخته خواهد شد.
رفرنس مقاله
I. F. M. Noor, M. S. M. Aras, M. H. Jali, A. A. Aziz, A. S. Jaafar, and M. N. Ibrahim,
“A Review of Multi-Agent Mobile Robot Systems Applications”,
International Journal of Electrical and Computer Engineering (IJECE),
Vol. 12, No. 4, August 2022, pp. 3758–3769.
DOI: 10.11591/ijece.v12i4.pp3758-3769



{kind=link}
بدون نظر