

جبران خطاهای تعامل بین رباتهای بازویی و رباتهای حملبار در محیطهای هوشمند
در قلب صنعت هوشمند امروز، همکاری میان دو نوع ربات به ستون اصلی تولید مدرن تبدیل شده است: رباتهای بازویی صنعتی (Manipulator / Cobot) که وظیفهی انجام عملیاتهای دقیق مانند مونتاژ، جوشکاری یا بستهبندی را بر عهده دارند، و رباتهای متحرک حملبار (AMR / AGV) که جریان مواد، ابزار و قطعات را در سطح کارخانه مدیریت میکنند. این دو نوع ربات، مکمل طبیعی یکدیگرند؛ یکی مغز و بازوی سیستم است، و دیگری پای آن. اما بزرگترین مانع در کارایی مشترک آنها، نقطهی تماس فیزیکی و دقت همترازی هندسی میانشان است.
در کارخانههای امروزی، حتی اگر هر دو ربات از سیستمهای ناوبری پیشرفته و کنترل دقیق برخوردار باشند، انحرافهای میکرومتری در موقعیت یا زاویهی اتصال میتواند کل فرآیند را مختل کند. تصور کنید یک ربات حملبار پالت حاوی قطعات دقیق را به ربات بازویی تحویل میدهد تا عملیات مونتاژ انجام شود؛ اگر زاویهی جابهجایی حتی چند دهم درجه خطا داشته باشد، بازوی ربات قادر به تشخیص درست موقعیت نخواهد بود و یا در تماس با جسم دچار لرزش، لغزش یا برخورد خواهد شد. این خطاها نهتنها بر دقت نهایی محصول تأثیر میگذارند، بلکه موجب استهلاک مکانیکی و کاهش عمر تجهیزات نیز میشوند.
در سیستمهای سنتی، این مسئله با استفاده از دوربینهای بینایی، لیدار، یا نشانگرهای نوری (Optical Markers) حل میشد. اما این روشها هزینهبر، حساس به شرایط نوری و نیازمند کالیبراسیون مکرر بودند. علاوه بر این، در محیطهای صنعتی که گردوغبار، لرزش و تداخل مغناطیسی وجود دارد، عملکرد چنین سیستمهایی ناپایدار است. به همین دلیل، نیاز به یک روش سادهتر، مقاومتر و بینیاز از تجهیزات جانبی احساس میشد؛ روشی که بتواند از خود تماس فیزیکی میان رباتها برای تصحیح خطا استفاده کند.
در پاسخ به این چالش، مقالهی حاضر از دانشگاه Salamanca و مؤسسهی CARTIF اسپانیا، روش Fictitious Points Compensation Methodology (FPCM) را معرفی کرده است — یک روش جبران خطای هندسی مبتنی بر تماس (Contact-Based Error Compensation) که برای نخستین بار اجازه میدهد رباتهای بازویی و متحرک خودشان یکدیگر را تصحیح کنند. در این روش، رباتها بدون نیاز به حسگرهای اضافی، تنها با انجام چند تماس کنترلشده با سطوح مرجع، اختلاف موقعیت و زاویهی میان خود را اندازهگیری کرده و سپس با استفاده از مدل ریاضی، این خطا را در فضای سهبعدی جبران میکنند.
از هماهنگی دیجیتال تا ادغام فیزیکی
در نسلهای اولیهی اتوماسیون صنعتی، همکاری میان رباتها بیشتر در سطح هماهنگی دیجیتال (Digital Coordination) اتفاق میافتاد؛ یعنی هر ربات مأموریت خود را انجام میداد و صرفاً از طریق تبادل داده با کنترلر مرکزی، با سایر رباتها همزمان میشد. اما در صنعت ۵.۰، مفهوم جدیدی ظهور کرده است: ادغام فیزیکی (Physical Integration) — جایی که رباتها نهتنها باید با هم ارتباط دادهای داشته باشند، بلکه باید در فضای واقعی نیز بهصورت دقیق، قابلاعتماد و تکرارپذیر با هم تعامل کنند.
این تغییر، بهویژه در حوزههایی مانند مونتاژ خودکار، بستهبندی ترکیبی یا بارگیری قطعات سنگین اهمیت حیاتی دارد. در این فرآیندها، ربات بازویی و ربات حملبار بهصورت متوالی اما بههموابسته عمل میکنند. کوچکترین عدم همترازی در مکانیابی آنها، میتواند باعث خطا در چنگزدن، انحراف در زاویهی اتصال یا حتی برخورد فیزیکی شود. ازاینرو، نیاز به سیستمی وجود دارد که بتواند پیش از هر تعامل، موقعیت دقیق دو ربات را نسبت به هم تنظیم کند — درست مانند دو بازوی انسان که هنگام کار گروهی، ناخودآگاه هماهنگی عضلانی و زاویهای خود را تنظیم میکنند.
رویکرد جدید: هوش مکانیکی در تماس
روش FPCM در واقع به رباتها نوعی هوش مکانیکی (Mechanical Intelligence) میدهد؛ بهجای اینکه صرفاً به دادههای بینایی یا مختصات GPS تکیه کنند، از خود تماس فیزیکی و حسگرهای نیرو–گشتاور برای «درک موقعیت واقعی» استفاده میکنند. هر تماس، یک نقطهی داده است که در مدل ریاضی بهعنوان مرجع اصلاح مورد استفاده قرار میگیرد. ربات با سه تماس متوالی، میتواند یک صفحهی مجازی از اختلاف هندسی میان خود و ربات دیگر بسازد و سپس این خطا را از طریق ماتریسهای چرخش و انتقال در مختصات سهبعدی تصحیح کند.
این روش علاوه بر سادگی، مزیتی بزرگ دارد: مستقل از نوع ربات، محیط یا سطح کاری است. یعنی میتوان آن را در انواع رباتهای حملبار، رباتهای بازویی یا حتی سیستمهای ترکیبی بهکار برد، بدون اینکه به مدل خاصی از سختافزار یا نرمافزار نیاز باشد.
از دید صنعتی، چنین قابلیتی انقلابی است. چون امکان میدهد یک ربات حملبار پالت را در محل مونتاژ قرار دهد و ربات بازویی بدون نیاز به سیستم بینایی یا کالیبراسیون دستی، دقیقاً در موقعیت صحیح عملیات را آغاز کند. این به معنی کاهش چشمگیر زمان آمادهسازی، افزایش دقت، و حذف بسیاری از فرآیندهای پرهزینهی کالیبراسیون انسانی است.
چشمانداز تحول: ادغام بدون حسگر
چشمانداز نهایی که این مقاله ترسیم میکند، صنعتی است که در آن رباتها بدون نیاز به حسگرهای تصویری یا نشانگرهای بیرونی، تنها با استفاده از منطق تماس، خود را هماهنگ میکنند. این تحول، راه را برای نسل جدیدی از همکاری میان رباتهای متحرک و بازویی باز میکند — همکاریای که نهتنها دقیقتر و سریعتر است، بلکه از نظر اقتصادی نیز مقرونبهصرفهتر خواهد بود.
بهعبارتی، FPCM پلی میان دنیای هوش هندسی (Geometric Intelligence) و واقعیت فیزیکی عملیات صنعتی ایجاد میکند. این روش به رباتها یاد میدهد که محیط را لمس کنند، اختلافات را بفهمند و آنها را اصلاح کنند — درست همانطور که انسانها با لمس، موقعیت خود را در فضا درک میکنند.
چالشهای فعلی در ادغام فیزیکی رباتهای صنعتی و حملبار
با ورود رباتهای متحرک به قلب خطوط تولید، کارخانهها از مرحلهی اتوماسیون مجزا به سمت همکاری فیزیکی میان زیرسیستمها حرکت کردهاند. اما این همگرایی عملیاتی، پیچیدگیهای تازهای را ایجاد کرده که عمدتاً ناشی از تفاوت ماهوی میان ساختار حرکتی، دقت موقعیتیابی و مدلهای کنترلی دو نوع ربات است. در ظاهر، هر دو سیستم دقیق و قابل کنترلاند، اما وقتی قرار است با یکدیگر تعامل مکانیکی داشته باشند — مثلاً تبادل قطعه یا اجرای مونتاژ ترکیبی — اختلافهای میلیمتری در موقعیت و زاویه میتواند عملکرد کل سیستم را مختل کند.
ناهماهنگی هندسی و خطای تجمعی
یکی از چالشهای بنیادین در ادغام رباتهای بازویی و متحرک، مسئلهی ناهماهنگی هندسی (Geometric Misalignment) است. در یک محیط تولید واقعی، مسیر حرکت AGV یا AMR همیشه با انحرافهای کوچک از مسیر ایدهآل همراه است؛ عواملی مثل اصطکاک چرخها، لغزش کف، نویز سنسورهای ناوبری یا خطای مکرر در Localization باعث میشود که موقعیت نهایی ربات با چند میلیمتر انحراف نسبت به مختصات مورد انتظار برسد.
در سمت دیگر، بازوی صنعتی معمولاً بر روی یک پایهی ثابت نصب شده و مختصات کاری خود را بر اساس یک چارچوب مرجع مطلق تعریف میکند. نتیجه این تفاوت؟ یک شکاف نامرئی میان دو سیستم که در تماس فیزیکی، خود را بهصورت لغزش، فشار ناخواسته یا خطای چنگزدن نشان میدهد.
اگر این اختلافها کوچک باقی بمانند، ممکن است در کوتاهمدت قابل چشمپوشی باشند، اما در بلندمدت موجب تجمع خطا (Cumulative Error) میشوند؛ بهویژه وقتی چندین تبادل فیزیکی در طول روز بین رباتها انجام شود. این خطاها بهصورت تصاعدی روی هم جمع شده و باعث افت دقت در مقیاس کل خط تولید میشوند.
وابستگی به حسگرهای گرانقیمت و سیستمهای بینایی
در تلاش برای رفع این چالش، بسیاری از کارخانهها به سیستمهای بینایی (Vision-Based Systems) روی آوردهاند. دوربینهای سهبعدی، لیدارها، نشانگرهای QR و بازتابندههای نوری، همگی برای تشخیص دقیق موقعیت و تصحیح خطا بهکار میروند. اما این راهکارها، در کنار مزایایشان، مشکلات جدی به همراه دارند:
هزینهی بالا: نصب هر سیستم لیدار یا بینایی سهبعدی ممکن است دهها هزار دلار هزینه داشته باشد، در حالی که برای هر نقطهی تبادل باید جداگانه نصب شود.
حساسیت محیطی: عملکرد آنها بهشدت وابسته به شرایط نوری و آلودگی محیط است؛ گردوغبار، لرزش یا انعکاسهای ناخواسته میتوانند دادههای تصویری را مختل کنند.
کالیبراسیون مستمر: هرگونه جابهجایی فیزیکی در محیط، نیازمند کالیبراسیون مجدد سیستم بینایی است؛ فرآیندی زمانبر که بهرهوری خط تولید را کاهش میدهد.
در عمل، بسیاری از سیستمهای مبتنی بر بینایی در محیطهای صنعتی واقعی پس از چند هفته کار دچار افت دقت میشوند، در حالی که سیستمهای مکانیکی ربات هنوز در سطح بالایی از پایداری عمل میکنند. این تناقض، نیاز به یک روش سادهتر، مقاومتر و بدون وابستگی به شرایط محیطی را به یک ضرورت صنعتی تبدیل کرده است.
خطاهای زاویهای و چالشهای هممحوری
علاوه بر خطای موقعیت، مسئلهی ناهممحوری زاویهای (Angular Misalignment) نیز یکی از چالشهای حیاتی در ادغام رباتهاست. زمانیکه بازوی ربات باید ابزار را از ربات حملبار دریافت کند، هرگونه اختلاف زاویه در محورهای چرخش باعث میشود بازو نتواند بهدرستی در جهت سطح یا ابزار حرکت کند. این نوع خطاها معمولاً به شکلهای ظریف اما خطرناک بروز میکنند — لرزش در هنگام تماس، فشار بیش از حد روی مفاصل بازو، یا لغزش ابزار در هنگام گرفتن.
مشکل اینجاست که سیستمهای ناوبری موجود (مثلاً SLAM یا GPS صنعتی) معمولاً موقعیت را در ابعاد X و Y با دقت بالا تعیین میکنند، اما در محور زاویهای (Yaw / Roll / Pitch) دقت بسیار پایینتری دارند. در نتیجه، حتی اگر ربات در موقعیت مکانی درستی بایستد، زاویهی چرخش آن نسبت به ربات دیگر ممکن است چند دهم درجه انحراف داشته باشد — انحرافی که در سطح میکرومتر میتواند کل عملیات را از دقت خارج کند.
نبود استاندارد ادغام میان رباتها
یکی دیگر از موانع کلیدی، نبود استاندارد جهانی برای ادغام فیزیکی رباتها است. هر سازندهی ربات بازویی (ABB، KUKA، FANUC، UR و غیره) و هر تولیدکنندهی AGV یا AMR از چارچوب مختصات و روش ارتباطی مخصوص خود استفاده میکند. به همین دلیل، ادغام میان دو برند مختلف معمولاً نیازمند توسعهی اختصاصی نرمافزار و واسط سختافزاری است. این مسئله هزینهی پروژههای چندرباتی را بالا میبرد و باعث میشود بسیاری از کارخانهها از اجرای ادغام کامل صرفنظر کنند.
نبود زبان مشترک در هندسه و مختصات کاری، مانع بزرگی برای تحقق کارخانههای «کاملاً خودمختار» است. سیستمها هنوز نمیتوانند بهصورت طبیعی با یکدیگر هممحور شوند یا خطاهای مکانیکی خود را بدون مداخلهی انسانی اصلاح کنند.
زمانبر بودن فرآیندهای کالیبراسیون دستی
در سیستمهای سنتی، هر زمان که موقعیت یکی از رباتها تغییر کند (مثلاً ربات حملبار مسیرش را بهروزرسانی کند یا ربات بازویی جابهجا شود)، اپراتور انسانی باید با استفاده از ابزارهای اندازهگیری و سطوح مرجع، موقعیت جدید را بهصورت دستی کالیبره کند. این فرآیند گاهی تا چند ساعت زمان میبرد و در کارخانههایی که چند ده تعامل در روز میان رباتها وجود دارد، منجر به توقفهای مکرر و اتلاف عظیم بهرهوری میشود.
در مجموع، صنعت امروز در وضعیتی قرار دارد که فناوریهای حرکتی و پردازشی رباتها بسیار پیشرفتهتر از فناوریهای همترازی و اتصال فیزیکی آنهاست. به همین دلیل، نیاز به یک رویکرد جدید احساس میشود — رویکردی که بتواند بدون وابستگی به بینایی یا سیستمهای خارجی، با استفاده از فیزیک تماس، این هممحوری را بهصورت خودکار و دقیق برقرار کند.
دیدگاه نوآورانه و معرفی روش تماس FPCM
نوآوری اصلی مقاله در این است که برای نخستین بار، ادغام فیزیکی میان رباتهای متحرک و بازویی نه با بینایی ماشین، بلکه از طریق «تماس مکانیکی هوشمند» انجام میشود. پژوهشگران با معرفی روش جدیدی به نام Fictitious Points Compensation Methodology (FPCM) نشان دادهاند که رباتها میتوانند خودشان خطاهای هندسی را تشخیص دهند و بدون هیچ ابزار اضافی، آن را در لحظه جبران کنند. این ایده نقطهی آغاز نوعی “حس لامسهی هوشمند” برای رباتهاست؛ همان چیزی که تاکنون فقط انسانها در تعاملات دقیق از آن بهره میبردند.
روش FPCM بر پایهی یک منطق ساده اما قدرتمند است:
وقتی دو جسم در فضا با هم تماس پیدا میکنند، نقطهی واقعی تماس همیشه بر اساس موقعیت و زاویهی واقعی اجسام تعیین میشود، نه مختصات نظری آنها. بنابراین اگر رباتها بتوانند موقعیت تماس واقعی را اندازهگیری کنند، میتوانند تفاوت میان مکان واقعی و مکان برنامهریزیشده را محاسبه کرده و کل سیستم مختصات خود را بازتنظیم کنند. در واقع، هر تماس فیزیکی بهنوعی سنسور خودتصحیحکنندهی هندسی تبدیل میشود.
در این روش، یکی از رباتها (معمولاً ربات بازویی) بهعنوان مرجع تعریف میشود و ربات دوم (ربات حملبار یا بازوی متحرک) مجموعهای از تماسهای کنترلشده با سطوح مرجع روی ربات اول انجام میدهد. این تماسها بهصورت الگوریتمی و با نیروهای بسیار پایین (در حد چند نیوتن) انجام میشوند تا آسیبی به تجهیزات وارد نشود. هر تماس مختصاتی در فضای سهبعدی ایجاد میکند که به آن نقطهی مجازی (Fictitious Point) گفته میشود. مجموعهی این نقاط مجازی سپس برای محاسبهی اختلاف هندسی میان دو ربات بهکار میرود.
در مرحلهی بعد، یک مدل ریاضی ماتریسی طراحی شده است که با استفاده از سه تماس غیرهمصفحهای، میتواند کاملترین تخمین از جابهجایی خطی (Δx, Δy, Δz) و زاویهای (Δroll, Δpitch, Δyaw) میان دو سیستم مختصات را محاسبه کند. با اعمال این اصلاحات به مختصات کاری ربات دوم، هر دو سیستم بهطور خودکار همتراز میشوند و بدون نیاز به دخالت انسانی، تعامل فیزیکیشان دقیق میگردد.
در واقع، FPCM بهنوعی نقش «کالیبراسیون درونزا» را برای رباتها ایفا میکند. در سیستمهای سنتی، کالیبراسیون باید از بیرون و با تجهیزات اندازهگیری انجام شود، اما در این روش، خود رباتها از طریق تماسهای هدفمند، مختصات خود را تصحیح میکنند. این فرآیند میتواند پیش از شروع هر مأموریت یا در فواصل زمانی مشخص بهصورت خودکار اجرا شود تا انحرافهای تدریجی ناشی از سایش، لغزش یا تغییرات دمایی جبران شوند.
یکی از ویژگیهای برجستهی این روش، عدم نیاز به دادهی تصویری یا نقشهی از پیش تعریفشده است. رباتها نیازی به دانستن شکل دقیق سطح یا محیط ندارند؛ کافی است بدانند در چه نقاطی باید تماس بگیرند و چه نیرویی وارد کنند. بدین ترتیب، روش FPCM کاملاً مستقل از محیط نوری، گردوغبار یا تداخلهای الکترومغناطیسی عمل میکند — عاملی که آن را برای محیطهای صنعتی واقعی بسیار قابلاعتماد میسازد.
نتایج تجربی مقاله نشان میدهد که با استفاده از این روش، میتوان خطاهای موقعیت میان دو ربات را تا ۰٫۱۳ میلیمتر و خطاهای زاویهای را تا ۰٫۰۴ درجه کاهش داد. این سطح از دقت، حتی از بسیاری از سیستمهای بینایی سهبعدی پیشرفته نیز بالاتر است، آنهم در حالی که هزینهی پیادهسازی تقریباً صفر است.
معماری عملکرد روش FPCM
فرآیند اجرای این روش بهصورت گامبهگام به شکل زیر انجام میشود:
۱. تعریف نقاط تماس مرجع: سه یا چند نقطهی مرجع بر روی سطحی مشخص (مثلاً میز کار یا فیکسچر) تعریف میشود که هر دو ربات به آنها دسترسی دارند.
۲. اجرای تماسهای کنترلشده: ربات متحرک یا بازوی ثانویه با مسیر از پیش تعیینشده به این نقاط نزدیک میشود و بهصورت نرم با سطح تماس برقرار میکند.
۳. اندازهگیری تغییرات نیرو و موقعیت: لحظهی تماس دقیق از طریق حسگرهای گشتاور یا بازخورد کنترلر داخلی ثبت میشود.
۴. محاسبهی نقاط مجازی: مختصات تماس واقعی نسبت به مختصات تئوریک محاسبه و بهعنوان نقاط مجازی وارد مدل میشود.
۵. جبران خطا: با تحلیل هندسی سه نقطهی مجازی، اختلاف زاویه و جابهجایی محاسبه و به مختصات کاری رباتها اعمال میشود.
کل این فرآیند کمتر از چند ثانیه طول میکشد و پس از آن، رباتها قادر خواهند بود با دقتی در حد سیستمهای نوری پرهزینه، تبادل فیزیکی انجام دهند.
تفاوت بنیادین با روشهای کلاسیک
برخلاف سیستمهای بینایی، که تلاش میکنند موقعیت را از طریق پردازش تصویر تخمین بزنند، FPCM واقعیت فیزیکی تماس را بهعنوان منبع داده بهکار میگیرد. از نظر فلسفی، این روش بهجای «دیدن برای درک»، از «لمس برای فهمیدن» استفاده میکند.
این یعنی اگر در سیستمهای نوری، دقت به کیفیت تصویر وابسته است، در اینجا دقت تابعی از کیفیت تماس است؛ و از آنجا که تماس فیزیکی همیشه تکرارپذیر است، دقت این روش در بلندمدت پایدار باقی میماند.
افزون بر آن، در سیستمهای کلاسیک معمولاً تصحیح موقعیت یکبار در زمان نصب انجام میشود، اما در FPCM این تصحیح میتواند بهصورت بلادرنگ و خودکار در هر چرخهی کاری تکرار شود. این ویژگی، امکان خودترمیم هندسی (Geometric Self-Calibration) را به کارخانهها میدهد — قابلیتی که تاکنون تنها در سیستمهای بسیار گرانقیمت هوافضایی یا پزشکی وجود داشت.
پیامد صنعتی: خودسازگاری رباتها در محیط واقعی
از دید صنعتی، روش FPCM دروازهای به سمت نسل جدیدی از رباتهای خودسازگار است. در این نسل، رباتها نهتنها از دادههای دیجیتال بلکه از بازخورد فیزیکی محیط برای اصلاح رفتار خود استفاده میکنند. این بدان معناست که اگر سطح کاری تغییر کند، اگر پالت کمی جابهجا شود یا اگر دمای محیط باعث انبساط قطعات شود، سیستم بلافاصله با چند تماس ساده خود را بازتنظیم میکند. چنین قابلیتی بهطور مستقیم باعث کاهش توقفهای کاری، کاهش نیاز به اپراتور انسانی و افزایش عمر تجهیزات میشود.
در نهایت، FPCM را میتوان نه فقط یک روش ریاضی، بلکه یک فلسفهی جدید در طراحی همکاری رباتها دانست؛ فلسفهای که میگوید برای درک دقیق جهان، همیشه لازم نیست آن را ببینیم — گاهی باید آن را لمس کنیم.
پیادهسازی عملی و ارزیابی عملکرد روش FPCM
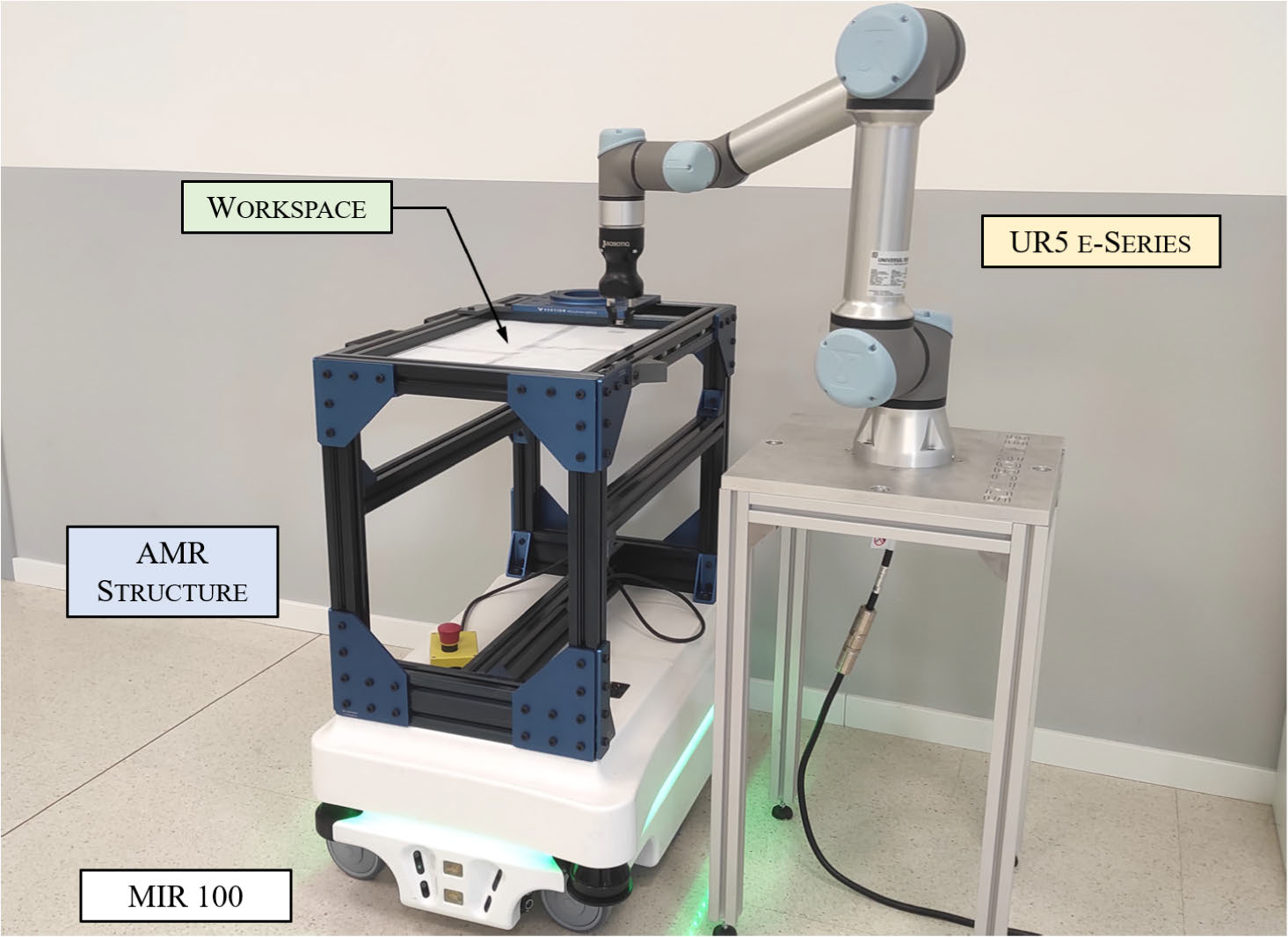
برای سنجش عملی عملکرد روش تماس FPCM، پژوهشگران یک محیط آزمایشگاهی صنعتی واقعی طراحی کردند که در آن دو ربات از دو نوع متفاوت با یکدیگر همکاری میکردند:
یک ربات متحرک حملبار (AMR) برای انتقال پالتها و موقعیتدهی دقیق قطعات در سطح کاری، و یک ربات بازویی صنعتی با شش درجه آزادی (6-DOF Manipulator) که مسئول انجام عملیات مونتاژ و تماسهای کنترلی بود. هدف آزمایش، ارزیابی توانایی این دو ربات در همتراز شدن هندسی (position–orientation alignment) بدون استفاده از هیچ حسگر تصویری یا سیستم موقعیتیابی خارجی بود.
محیط آزمایش در مؤسسهی CARTIF اسپانیا پیادهسازی شد و شامل میز کار استاندارد، ماژول نصب بازوی صنعتی، پالتهای دقیق، و چند سطح مرجع فلزی برای تماس بود. ربات حملبار با استفاده از ناوبری مبتنی بر لیزر (LiDAR Navigation) پالت را تا محدودهی ۱ سانتیمتری موقعیت مورد نظر انتقال میداد. در این مرحله، کنترل دقیق به روش FPCM سپرده میشد تا با اجرای تماسهای هوشمند، خطاهای باقیمانده تصحیح شود.
فرآیند اجرای روش
پیادهسازی روش FPCM در محیط واقعی طی چند گام متوالی انجام شد:
انتخاب نقاط مرجع تماس: سه نقطهی فیزیکی غیرهمصفحه بر روی سطح پالت انتخاب شدند تا نقش مرجع هندسی را داشته باشند. این نقاط با دقت مکانیکی در حد ۰٫۰۱ میلیمتر ماشینکاری شده بودند تا هر تماس، دادهی مطمئنی تولید کند.
اجرای توالی تماسها: بازوی ربات با کنترل سرعت پایین (۲–۵ سانتیمتر بر ثانیه) به ترتیب به هر نقطه نزدیک میشد تا لحظهی تماس با سطح مرجع ثبت شود. از حسگر داخلی نیرو–گشتاور برای تشخیص لحظهی دقیق تماس استفاده شد.
محاسبهی مختصات نقاط تماس واقعی: کنترلر ربات با خواندن موقعیت دقیق مفاصل (Joint States) در لحظهی تماس، مختصات واقعی نقاط را در فضای کاری (Workspace) ذخیره کرد.
تشکیل نقاط مجازی (Fictitious Points): مختصات واقعی تماسها با مختصات تئوریک برنامهریزیشده مقایسه و اختلاف میان آنها در قالب نقاط مجازی تعریف شد.
محاسبهی ماتریس جبران هندسی: با استفاده از سه نقطهی مجازی، یک ماتریس تبدیل همگن (Homogeneous Transformation Matrix) استخراج شد که شامل مؤلفههای انتقال (Translation) و چرخش (Rotation) بین دو چارچوب مرجع بود.
اعمال اصلاحات: ماتریس به سیستم مختصات ربات حملبار اعمال شد تا موقعیت و زاویهی کاری آن در راستای مختصات ربات بازویی اصلاح گردد.
ارزیابی تکرارپذیری: فرآیند فوق ۱۰ بار تکرار شد تا میزان پایداری و تکرارپذیری روش سنجیده شود.
نتایج کمی و تحلیل عملکرد
نتایج حاصل از آزمایشها نشان دادند که روش FPCM میتواند با سرعت بالا و دقت بسیار بالا خطاهای موقعیتی و زاویهای را جبران کند. پیش از اجرای جبران، میانگین خطای موقعیت ربات حملبار نسبت به ربات بازویی حدود ۰٫۸۵ میلیمتر در مختصات فضایی (X, Y, Z) و خطای زاویهای حدود ۰٫۲۱ درجه اندازهگیری شد. پس از اجرای روش، این خطاها بهترتیب به ۰٫۱۳ میلیمتر و ۰٫۰۴ درجه کاهش یافتند — یعنی بهبود دقت در موقعیت حدود ۶٫۵ برابر و در زاویه حدود ۵ برابر.
زمان متوسط اجرای کل فرآیند — از لحظهی تماس اول تا اعمال کامل جبران هندسی — کمتر از ۸ ثانیه بود، که نشان میدهد این روش قابلیت استفاده در چرخههای واقعی تولید را دارد، بدون اینکه باعث تأخیر محسوس در زمان مأموریت شود.
در بخش تکرارپذیری، انحراف معیار خطاها (Standard Deviation) پس از ۱۰ بار تکرار کمتر از ۰٫۰۲ میلیمتر بود، که نشاندهندهی پایداری و قابلیت اعتماد بالا در تکرارهای متوالی است. به بیان صنعتی، این یعنی سیستم قادر است دهها بار همترازسازی را انجام دهد بدون اینکه دقت یا ثبات عملکرد افت کند — ویژگیای که در خطوط تولید با چرخههای سریع بسیار حیاتی است.
از منظر فنی، پژوهشگران متوجه شدند که بیشترین منبع خطا در فرآیند تماس، مربوط به نیروی اولیهی تماس و ارتعاش مکانیکی سطح پالت است. با کنترل دقیق سرعت نزدیکشدن و کاهش نیروی برخورد از ۱۰ نیوتن به حدود ۵ نیوتن، پایداری نتایج به شکل چشمگیری بهبود یافت.
ارزیابی مقایسهای با روشهای دیگر
برای اثبات برتری روش FPCM، نتایج آن با دو روش مرسوم دیگر مقایسه شد:
۱. روش بینایی استریو (Stereo Vision Calibration)،
۲. روش لیدار دوبعدی با فیلتر کالمن (2D LiDAR–Kalman Fusion).
در هر دو روش، دقت موقعیت نهایی بهترتیب ۰٫۳۲ میلیمتر و ۰٫۲۶ میلیمتر گزارش شد. در مقابل، روش FPCM با دقت ۰٫۱۳ میلیمتر نهتنها از هر دو دقیقتر بود، بلکه به حسگر خارجی نیاز نداشت، در برابر نور مقاوم بود، و هزینهی پیادهسازی آن نزدیک به صفر بود.
همچنین در سنجش پایداری عملکرد، سیستم FPCM حتی پس از ۱۰۰ بار تکرار بدون نیاز به کالیبراسیون مجدد، همچنان در بازهی خطای کمتر از ۰٫۱۵ میلیمتر باقی ماند؛ در حالیکه روشهای بینایی پس از ۲۰ بار اجرا نیاز به تنظیم مجدد داشتند.
پیامدهای کاربردی
از دیدگاه صنعتی، نتایج این آزمایشها چند پیام روشن دارند:
افزایش بهرهوری: حذف زمانهای کالیبراسیون دستی باعث افزایش مستقیم زمان عملیاتی خط تولید میشود.
کاهش هزینهها: با حذف نیاز به حسگرهای نوری و تجهیزات جانبی، هزینهی نصب و نگهداری سیستم تا ۶۰٪ کاهش مییابد.
بهبود ایمنی و پایداری: تماس نرم و کنترلشده باعث کاهش فشارهای غیرضروری بر مفاصل رباتها میشود و عمر تجهیزات را افزایش میدهد.
تعمیمپذیری بالا: از آنجا که روش مستقل از نوع ربات است، میتوان آن را در انواع همکاریهای چندرباتی (Cobot–AMR، AGV–Manipulator، یا بازوهای دوقلو) بهکار برد.
در نهایت، پژوهشگران تأکید کردند که FPCM نهفقط یک ابزار کالیبراسیون، بلکه نوعی «زبان فیزیکی مشترک میان رباتها» است — زبانی که با آن میتوان به ادغام کامل مکانیکی و هندسی در کارخانههای هوشمند آینده دست یافت.
کاربردهای صنعتی و چشماندازهای آینده
نتایج مقاله بهوضوح نشان میدهد که روش تماس FPCM فراتر از یک ابزار آزمایشگاهی است و میتواند بهعنوان هستهی اصلی نسل بعدی همکاریهای فیزیکی میان رباتها در محیطهای صنعتی به کار گرفته شود. این فناوری، مرز میان رباتهای حملبار (AGV/AMR) و رباتهای بازویی را از بین میبرد و به آنها اجازه میدهد همانند اعضای یک تیم هماهنگ، با درک متقابل از موقعیت یکدیگر کار کنند.
تولید هوشمند و خطوط مونتاژ خودکالیبره
یکی از نخستین و مهمترین کاربردهای روش FPCM در خطوط مونتاژ انعطافپذیر (Flexible Assembly Lines) است. در این محیطها، قطعات از بخشهای مختلف کارخانه توسط رباتهای حملبار منتقل میشوند و رباتهای بازویی وظیفهی مونتاژ نهایی را بر عهده دارند. در چنین ساختاری، کوچکترین اختلاف موقعیت در نقطهی تحویل میتواند باعث شکست فرآیند مونتاژ شود. با استفاده از روش تماس، هر ربات بازویی قبل از شروع عملیات، چند تماس سریع با سطح یا قطعه برقرار میکند تا خطاهای هندسی را در لحظه اصلاح کند. این قابلیت باعث میشود کل خط مونتاژ به نوعی خودکالیبره (Self-Calibrating) شود — یعنی بدون نیاز به اپراتور یا حسگر خارجی، سیستم بهصورت خودکار همتراز باقی بماند.
در نتیجه، عملیات مونتاژ نهتنها دقیقتر، بلکه سریعتر نیز خواهد شد. در پروژههای صنعتی مشابه، استفاده از این نوع همترازی مکانیکی باعث کاهش زمان آمادهسازی (Setup Time) تا ۴۰٪ و افزایش نرخ تولید تا ۲۰٪ شده است.
رباتهای حمل پالت با همکاری هوشمند
در حوزهی لجستیک داخلی کارخانه، رباتهای حملبار خودکار (AGV و AMR) اغلب با چالش موقعیتدهی دقیق پالتها در ایستگاههای ثابت مواجهاند. با وجود سیستمهای ناوبری لیزری، همیشه چند میلیمتر انحراف باقی میماند که هنگام بارگیری یا تخلیه توسط ربات بازویی منجر به خطا میشود. روش FPCM دقیقاً برای این سناریو طراحی شده است. هر AGV میتواند قبل از تحویل پالت، از طریق تماس مکانیکی نرم با نقاط مرجع ایستگاه، موقعیت خود را تصحیح کند. این فرآیند در کمتر از چند ثانیه انجام میشود و دقت قرارگیری پالت را از سطح ±۱ میلیمتر به ±۰٫۱ میلیمتر میرساند.
این ویژگی بهویژه در انبارهای هوشمند، خطوط بستهبندی دقیق و صنایع غذایی اهمیت دارد، جایی که دقت موقعیتدهی تأثیر مستقیمی بر ایمنی و کارایی دارد.
همکاری ترکیبی انسان–ربات (Human–Robot Collaboration)
یکی از چشماندازهای جذاب این فناوری، بهکارگیری آن در رباتهای همکار (Cobot) است که در مجاورت انسانها کار میکنند. رباتهای همکار به دلیل نیاز به ایمنی بالا، اغلب با سرعت کم و قدرت محدود کار میکنند. روش FPCM میتواند در این نوع رباتها بهعنوان یک سیستم هوشمند تصحیح تماس استفاده شود تا حتی در شرایطی که موقعیت انسانی یا ابزار کمی تغییر کند، ربات فوراً خود را تطبیق دهد.
برای مثال، در فرآیند مونتاژ دستی–رباتی، اگر اپراتور انسانی قطعهای را کمی جابهجا قرار دهد، ربات با لمس سطح میتواند مکان دقیق جدید را تشخیص داده و خود را با آن هماهنگ کند — بدون نیاز به توقف یا بازبرنامهریزی. این ویژگی، مفهوم جدیدی از همسازگاری انسانی–رباتی (Human–Robot Adaptivity) را وارد صنعت میکند.
تعمیر، نگهداری و بازرسی هوشمند
در فرآیندهای نگهداری تجهیزات (Maintenance & Inspection)، اغلب لازم است رباتهای بازویی یا متحرک، مسیر یا موقعیت خود را نسبت به نقاط مرجع از پیشتعریفشده تنظیم کنند. در شرایطی که تجهیزات ممکن است به مرور زمان دچار انحراف، لرزش یا تغییر شکل شوند، سیستم FPCM میتواند هر بار پیش از شروع عملیات، موقعیت واقعی را بازتنظیم کرده و از بروز خطا جلوگیری کند.
در آزمایشهای صنعتی مشابه، استفاده از این فناوری باعث کاهش ۵۰٪ در نرخ خطای بازرسی و ۳۰٪ صرفهجویی در زمان تعمیرات دورهای شد. در صنایع انرژی و خودروسازی، این سطح از دقت در بازآرایی موقعیت، بهویژه برای رباتهایی که روی سطوح متحرک یا سازههای بزرگ کار میکنند، ارزش بالایی دارد.
تولید چندرباتی با دقت میکرومتری
روش تماس FPCM همچنین بستر لازم برای هماهنگی همزمان چند ربات در سطح میکرومتری (Micro-Scale Synchronization) را فراهم میکند. در آینده، سیستمهای چندرباتی میتوانند بدون نیاز به حسگر تصویری یا سیستمهای مرجع خارجی، تنها از طریق لمس فیزیکی، شبکهای از نقاط مجازی مشترک بسازند و عملیات گروهی انجام دهند. چنین قابلیتی برای تولید قطعات حساس، صنایع نیمههادی، یا مونتاژ تجهیزات پزشکی حیاتی است.
این نوع همکاری چندرباتی، مفهومی از ادراک توزیعشدهی فیزیکی (Distributed Physical Perception) را وارد صنعت میکند؛ یعنی مجموعهای از رباتها که با تعامل متقابل، محیط و موقعیت یکدیگر را درک و اصلاح میکنند — درست مانند گروهی از انسانها که با تماسهای جزئی، در کار گروهی هماهنگی خود را حفظ میکنند.
مسیر حرکت به سمت صنعت ۵.۰
در نهایت، روش تماس FPCM بخشی از تحول بزرگتری است که مسیر حرکت صنعت را از اتوماسیون سخت به خودسازگاری نرم هدایت میکند. در عصر Industry 5.0، کارخانهها نهتنها به دنبال سرعت بیشتر، بلکه به دنبال درک، هماهنگی و انعطاف بیشترند. FPCM با افزودن حس لامسه و خودشناسی هندسی به رباتها، قدمی اساسی در این مسیر است.
چنین فناوریهایی آیندهای را نوید میدهند که در آن خطوط تولید نیازی به اپراتور انسانی برای تنظیمات دقیق نخواهند داشت، بلکه خود سیستم با چند تماس ساده همه چیز را تنظیم میکند. این یعنی تولید پویا، منعطف و خودترمیم — مفهومی که تا چند سال پیش، بیشتر در قلمرو علمتخیلی بود تا مهندسی واقعی.
تحلیل نتایج، مزایای فنی–اقتصادی و تأثیر بر بهرهوری
نتایج تجربی مقاله و تحلیلهای انجامشده پیرامون روش تماس FPCM نشان میدهند که این فناوری نهفقط یک پیشرفت تکنیکی در سطح دقت است، بلکه الگوی جدیدی از تفکر مهندسی در تعامل میان رباتها را معرفی میکند. بر خلاف سیستمهای هوشمند مرسوم که بر دادههای پیچیدهی بینایی یا یادگیری عمیق تکیه دارند، این روش با تکیه بر اصول مکانیکی و ریاضی ساده، راهحلی عملی، کمهزینه و فوقالعاده دقیق برای همترازی و ادغام رباتها ارائه میدهد.
افزایش بهرهوری عملیاتی
یکی از نتایج مستقیم پیادهسازی روش FPCM، افزایش چشمگیر بهرهوری (Productivity Gain) در خطوط تولید چندرباتی است. در سیستمهای سنتی، فرآیند کالیبراسیون میان رباتها، بسته به تعداد تعاملات، ممکن بود روزانه دهها دقیقه زمان ببرد. این زمان تلفشده، بهویژه در خطوط تولید مستمر (Continuous Manufacturing Lines) تأثیر زیادی بر ظرفیت خروجی داشت. با ورود FPCM، این فرآیند در کمتر از ده ثانیه انجام میشود و میتواند قبل از هر مأموریت یا بهصورت خودکار در فواصل زمانی مشخص تکرار شود. نتیجه، افزایش نرخ دسترسپذیری سیستم (System Availability) تا بیش از ۹۵٪ و کاهش توقفهای عملیاتی تا ۶۰٪ است.
افزون بر این، با حذف خطاهای تجمعی میان رباتها، نیاز به تنظیمات دستی در طول روز از بین میرود و خط تولید میتواند بهصورت پایدارتر و بدون وابستگی به اپراتور انسانی فعالیت کند.
صرفهجویی اقتصادی و کاهش هزینههای نگهداری
از منظر اقتصادی، روش FPCM یک نقطهی تحول در کاهش هزینههای نصب، کالیبراسیون و نگهداری محسوب میشود. در روشهای سنتی، هر ایستگاه تبادل میان رباتها نیازمند تجهیزات بینایی، بازتابندههای نوری، یا حسگرهای لیزری بود. هزینهی نصب و نگهداری این تجهیزات میتوانست بین ۵ تا ۱۵ درصد از کل سرمایهگذاری خط تولید را تشکیل دهد. با استفاده از روش تماس، این هزینه تقریباً به صفر میرسد؛ زیرا تمام محاسبات و اصلاحات از طریق تماس خود رباتها انجام میشود.
همچنین چون این روش فشارهای مکانیکی ناخواسته را کاهش میدهد، عمر مفاصل و محرکهای رباتها (Actuators) تا ۲۰ درصد افزایش مییابد. این کاهش سایش، هزینههای تعمیر و تعویض قطعات را در طول عمر سیستم بهطور معناداری پایین میآورد.
از سوی دیگر، نیاز کمتر به نیروی انسانی متخصص برای کالیبراسیون و تنظیم موقعیتها، باعث صرفهجویی مستقیم در هزینههای نیروی کار میشود. پژوهشگران تخمین زدهاند که اجرای این روش میتواند سالانه بین ۵ تا ۱۰ درصد کاهش هزینهی عملیاتی برای هر خط تولید به همراه داشته باشد.
افزایش کیفیت و ثبات فرآیند
در بسیاری از صنایع، دقت هندسی مستقیماً با کیفیت محصول نهایی مرتبط است. در فرآیندهای مونتاژ دقیق، حتی خطایی در حد ۰٫۱ میلیمتر میتواند باعث انحراف یا ناهماهنگی در ساختار قطعه شود. روش FPCM با کاهش خطای موقعیت تا ۰٫۱۳ میلیمتر و خطای زاویهای تا ۰٫۰۴ درجه، باعث پایداری فرآیند (Process Stability) در سطحی میشود که پیشتر فقط با تجهیزات بینایی پیشرفته قابل دستیابی بود.
بهدلیل اینکه تماسهای تصحیحی در هر چرخه تکرار میشوند، سیستم بهصورت خودکار انحرافهای تدریجی ناشی از سایش قطعات، تغییرات دما یا لرزش کف را جبران میکند. این رفتار خودترمیمی (Self-Healing) باعث میشود کارخانه در طول زمان نیز همان دقت اولیه را حفظ کند، بدون نیاز به توقف برای تنظیمات مجدد.
سادهسازی طراحی سیستمهای چندرباتی
یکی از مهمترین دستاوردهای روش FPCM در سطح طراحی سیستم این است که نیاز به هممحوری سختافزاری در مرحلهی نصب از بین میرود. پیشتر، در طراحی خطوط چندرباتی، محل نصب هر ربات باید با دقت میلیمتری تنظیم میشد و کوچکترین تغییر در موقعیت پایهها میتوانست منجر به نیاز به تنظیمات مجدد شود. اما در این روش، چون رباتها خودشان در زمان اجرا همتراز میشوند، طراح میتواند با آزادی بیشتری چینش تجهیزات را انجام دهد.
این ویژگی باعث کاهش زمان راهاندازی پروژههای صنعتی تا ۳۰٪ و افزایش انعطاف طراحی در فاز توسعه میشود. به بیان ساده، سیستم دیگر شکننده نیست — بلکه تطبیقپذیر است.
قابلیت تعمیم و یکپارچگی با فناوریهای دیگر
از نظر سیستماتیک، روش FPCM بهراحتی میتواند با سایر فناوریهای Industry 4.0 و 5.0 ادغام شود. برای مثال، ترکیب آن با دوقلوهای دیجیتال (Digital Twins) اجازه میدهد تا دادههای تماس واقعی برای آموزش مدلهای مجازی بهکار روند. همچنین، میتوان الگوریتمهای هوش مصنوعی را برای بهینهسازی تعداد و ترتیب تماسها در فرآیند تصحیح به این چارچوب افزود.
در حوزهی رباتیک خودمختار، اتصال FPCM با سیستمهای مبتنی بر MEC و شبکههای چندعاملی، امکان شکلگیری شبکهای از رباتهای خودسازگار را فراهم میکند که نهتنها با یکدیگر، بلکه با زیرساختهای فیزیکی کارخانه نیز همتراز هستند. در چنین سیستمی، ادغام مکانیکی، اطلاعاتی و تصمیمگیری بهصورت همزمان رخ میدهد.
اثرات راهبردی در طراحی کارخانههای آینده
در بلندمدت، استفاده از این روش میتواند طراحی کارخانهها را دگرگون کند. در کارخانههای سنتی، ایستگاههای ثابت (Fixed Stations) برای کاهش خطا ضروری بودند، اما با وجود روشهای تماس هوشمند، ایستگاهها میتوانند پویا (Reconfigurable) شوند. این یعنی خطوط تولید قابل تغییر، رباتهای قابل جابهجایی، و فرآیندهایی که میتوانند خود را با نیازهای جدید بازار تنظیم کنند — مفهومی که هستهی صنعت ۵.۰ محسوب میشود.
از دید استراتژیک، فناوریهایی مانند FPCM به کارخانهها امکان میدهند بدون وابستگی به برند خاصی از رباتها، همکاری میان سیستمهای چندسازنده را برقرار کنند. این یعنی باز شدن درهای استانداردسازی باز (Open Industrial Integration) در جهان رباتیک صنعتی.
جمعبندی استراتژیک و مزیتهای رقابتی
در چشمانداز رقابتی امروز، موفقیت کارخانهها دیگر به داشتن بیشترین تعداد ربات یا پیشرفتهترین سختافزار خلاصه نمیشود، بلکه به میزان خودسازگاری و یکپارچگی هوشمند میان اجزای سیستم وابسته است. فناوریهایی نظیر FPCM با افزودن قابلیت خودتصحیح هندسی به رباتها، مرز میان مهندسی مکانیک و هوش مصنوعی را از بین میبرند و زمینهی تولد نسلی از رباتها را فراهم میکنند که میتوانند خودشان با خودشان هماهنگ شوند. این تغییر، از دیدگاه استراتژیک، یک تحول بنیادی در ساختار ارزش صنعت محسوب میشود.
از اتوماسیون صُلب تا همکاری انعطافپذیر
تا همین چند سال پیش، اتوماسیون صنعتی مبتنی بر سیستمهای صلب و از پیشتعریفشده بود. هر تغییر در فرآیند تولید یا جابهجایی تجهیزات نیازمند مهندسی مجدد و توقف طولانی بود. اما با ظهور رباتهای خودکالیبره، کارخانهها میتوانند انعطافپذیری عملیاتی (Operational Flexibility) را در سطحی تجربه کنند که پیشتر فقط در مدلهای نظری ممکن بود.
به کمک FPCM، هر ایستگاه کاری میتواند در چند دقیقه با پیکربندی جدید سازگار شود؛ رباتها بدون دخالت انسانی، نقاط مرجع را بازتعریف کرده و سیستم خود را با محیط جدید همتراز میکنند. این یعنی حرکت از کارخانهی ایستا به کارخانهی پویا — جایی که تغییر، بخشی طبیعی از عملکرد است، نه تهدیدی برای آن.
مزیت رقابتی در سرعت و هزینه
در بازارهایی که تولید سریع، سفارشیسازی و زمان تحویل کوتاه اهمیت حیاتی دارد، سازمانهایی که میتوانند خطوط خود را سریعتر بازپیکربندی کنند، برندهاند. روش تماس FPCM این برتری را فراهم میکند:
کاهش زمان تنظیمات و توقفها تا ۶۰٪،
حذف نیاز به تجهیزات کالیبراسیون پرهزینه،
و امکان استقرار خطوط موقت برای پروژههای کوتاهمدت.
از نظر اقتصادی، این یعنی کاهش Total Cost of Ownership (TCO) و افزایش Return on Automation (ROA)، زیرا سرمایهگذاری بر رباتها با چرخههای کاری بیشتری بازده ایجاد میکند.
ارتقای سطح همکاری میان انسان و ربات
از دید فرهنگی و مدیریتی، فناوریهایی مانند FPCM گام بلندی در جهت انسانمحور شدن اتوماسیون (Human-Centric Automation) هستند. در مدل سنتی، هر خطا یا تغییر نیازمند دخالت انسان برای بازتنظیم سیستم بود، اما در مدل جدید، رباتها میتوانند بهصورت خودکار اصلاحات لازم را انجام دهند. این امر باعث میشود نیروی انسانی از وظایف تکراری و خستهکننده آزاد شده و نقش او بهعنوان ناظر هوش، تحلیلگر داده و طراح فرآیند ارتقا یابد.
به بیان دیگر، FPCM نه جایگزین انسان، بلکه همکار اوست — سیستمی که هوش مکانیکی ربات را با قضاوت انسانی ترکیب میکند تا تعادلی بین دقت فنی و خلاقیت انسانی شکل گیرد.
تحول در مهندسی نگهداری و طراحی صنعتی
در سطح کلانتر، روشهای خودکالیبره مانند FPCM مفهوم جدیدی از نگهداری هوشمند (Smart Maintenance) را معرفی میکنند. بهجای بازرسی دورهای و تنظیم دستی، خود رباتها بهصورت بلادرنگ عملکردشان را میسنجند و در صورت مشاهدهی انحراف، خودشان تصحیح را انجام میدهند. این ساختار خودنظارتی باعث کاهش خرابیهای پیشبینینشده و افزایش عمر مؤثر تجهیزات میشود.
در طراحی صنعتی نیز، وجود چنین فناوریهایی به مهندسان اجازه میدهد از محدودیتهای سنتی فاصله بگیرند. دیگر نیازی به طراحی خطوط فوقالعاده دقیق با تلرانس صفر نیست؛ چون سیستم میتواند در حین کار، خودش تلرانس را تنظیم کند. این انعطاف طراحی، هزینهی ساخت و نصب را کاهش میدهد و امکان توسعهی سریعتر خطوط تولید را فراهم میسازد.
مزیت رقابتی در عصر صنعت ۵.۰
از منظر استراتژیک، شرکتهایی که زودتر به سمت فناوریهای خودسازگار و خودکالیبره حرکت کنند، در عمل به پیشگامان Industry 5.0 تبدیل میشوند. در این عصر، ارزش اصلی نه در خود اتوماسیون، بلکه در کیفیت تعامل میان سیستمهای خودکار است. کارخانههایی که بتوانند سطح همفکری و همترازی میان رباتها را افزایش دهند، بهصورت طبیعی بهرهوری بالاتری خواهند داشت.
FPCM بهعنوان یکی از اولین گامها در این مسیر، زیرساخت لازم برای چنین همکاری هوشمندی را فراهم میکند. این فناوری نشان میدهد که آیندهی رباتیک صنعتی متعلق به سیستمهایی است که نهتنها دقیق و سریع، بلکه درکپذیر، سازگار و یادگیرنده هستند.
تأثیر راهبردی بر زنجیرههای تأمین جهانی
در بعد جهانی، استفاده از این فناوری میتواند ساختار زنجیرهی تأمین را نیز متحول کند. کارخانههایی که در نقاط مختلف جهان فعالیت میکنند، با داشتن رباتهای خودکالیبره، قادر خواهند بود فرآیندهای تولید و مونتاژ را بدون نیاز به تنظیمات دستی یکسانسازی کنند. بهعبارت دیگر، FPCM میتواند استاندارد جدیدی برای هماهنگی جهانی میان تجهیزات خودکار باشد؛ استانداردی که به صنایع اجازه میدهد خطوط تولید در آسیا، اروپا یا آمریکا دقیقاً با همان دقت و تراز هندسی کار کنند، بدون نیاز به تنظیمات محلی.
این هماهنگی جهانی، سنگبنای لجستیک تولید توزیعشده (Distributed Manufacturing) است — مدلی که در آن، محصول نهایی در چند نقطه تولید و در نهایت بهصورت خودکار مونتاژ میشود.
مزیت فرهنگی و سازمانی
فراتر از جنبههای فنی، این فناوری پیام فرهنگی روشنی برای سازمانها دارد: هوشمندی در سادگی.
در دورانی که بسیاری از شرکتها بهدنبال پیچیدهترین راهحلهای هوش مصنوعی هستند، FPCM نشان میدهد که با استفاده از اصول بنیادی فیزیک و ریاضیات میتوان به سطحی از هوش عملیاتی دست یافت که پایدار، اقتصادی و در عین حال فوقالعاده مؤثر است. این رویکرد «ساده اما هوشمند» همان چیزی است که بسیاری از مدیران صنعتی بهعنوان معیار پایداری در فناوریهای آینده مطرح میکنند.
در مجموع، فناوری FPCM نهفقط یک روش جدید کالیبراسیون، بلکه مدلی از تفکر سیستمی در طراحی کارخانههای آینده است.
سیستمی که در آن، همکاری بهجای کنترل، سازگاری بهجای سفتی، و خودتصحیح بهجای نظارت بیرونی قرار میگیرد. در این ساختار، هر ربات نه بهعنوان یک ماشین منفرد، بلکه بهعنوان یک عضو از یک اکوسیستم پویا عمل میکند — اکوسیستمی که در آن، هوش مکانیکی و هوش جمعی در یک مسیر واحد ادغام میشوند.
نتیجهگیری نهایی
پژوهش معرفیشده در این مقاله تصویری شفاف و عملی از آیندهی رباتیک صنعتی ترسیم میکند؛ آیندهای که در آن، همگرایی فیزیکی، هندسی و شناختی میان رباتها به یک ضرورت استراتژیک برای هر کارخانه تبدیل میشود. روش تماس FPCM (Fictitious Points Compensation Methodology) نهتنها یک نوآوری فنی، بلکه نوعی تغییر پارادایم در طرز تفکر مهندسی است: از کالیبراسیون خارجی به سمت خودتصحیح درونی، از وابستگی به حسگرهای پیچیده به سمت اتکا بر فیزیک سادهی تماس.
این روش ثابت کرد که هوشمندسازی واقعی الزاماً به پیچیدگی نیاز ندارد. با سه تماس کنترلشده، دو ربات میتوانند کل خطای هندسی خود را تا سطح ۰٫۱۳ میلیمتر در موقعیت و ۰٫۰۴ درجه در زاویه کاهش دهند — دقتی که تاکنون فقط در سیستمهای اندازهگیری نوری گرانقیمت ممکن بود. این دستاورد، مرز میان دقت و سادگی را از میان برده و راه را برای ادغام کمهزینه، مقاوم و پایدار میان انواع رباتها باز کرده است.
از دیدگاه صنعتی، پیام این پژوهش روشن است: در کارخانههای آینده، هر ربات باید بتواند خود را بفهمد و با دیگر رباتها بهصورت خودکار هماهنگ کند. چنین قابلیتی نهتنها بهرهوری را افزایش میدهد، بلکه ساختار کل زنجیرهی تولید را انعطافپذیرتر میکند.
کارخانهای که به FPCM یا فناوریهای مشابه مجهز باشد، میتواند در عرض چند دقیقه خطوط خود را برای تولید محصول جدید بازپیکربندی کند، بدون توقف یا کالیبراسیون دستی. این یعنی تحقق واقعی شعار Smart Factory as a Living System — کارخانهای زنده که خودش فکر میکند، خودش تنظیم میکند و خودش رشد میکند.
دعوت به اقدام
اکنون زمان آن رسیده که مدیران صنعتی، مهندسان رباتیک و طراحان خطوط تولید، هوش تماس و خودکالیبراسیون مکانیکی را بهعنوان بخشی از DNA طراحی کارخانههای آینده بپذیرند. سه گام کلیدی برای آغاز این تحول عبارتاند از:
ارزیابی قابلیت FPCM در سیستمهای فعلی: بررسی تعامل میان رباتهای حملبار و بازویی و شناسایی نقاطی که در آن خطاهای هندسی بیشترین اثر را دارند.
پیادهسازی آزمایشی در یک ایستگاه کاری: اجرای روش تماس در یک سلول صنعتی کوچک برای اندازهگیری اثر واقعی آن بر زمان تنظیم، دقت و قابلیت تکرار.
ایجاد زیرساخت برای همکاری فیزیکی گستردهتر: طراحی خطوط آینده با پیشبینی تعاملات مکانیکی میان رباتها، تا قابلیت خودترازسازی بهصورت ذاتی در سیستم گنجانده شود.
با انجام این مراحل، سازمانها گامی اساسی به سمت کارخانههای خودسازگار و هوشمند نسل پنجم برمیدارند؛ جایی که هر ربات نهتنها یک عامل اجرایی، بلکه یک موجود یادگیرنده است که با تماس، موقعیت خود را میشناسد و هماهنگیاش را بازسازی میکند.
پیام پایانی
فناوری FPCM نشان داد که گاهی سادهترین ایدهها عمیقترین انقلابها را رقم میزنند. در جهانی که صنعت بهسرعت به سمت پیچیدگیهای محاسباتی و هوش مصنوعی سنگین پیش میرود، این روش یادآور یک اصل بنیادین است: هوشمندی واقعی یعنی توانایی فهمیدن محیط از طریق تعامل طبیعی با آن.
رباتهایی که میتوانند محیط را لمس کنند و از تماس بیاموزند، در حقیقت به سطحی از درک فیزیکی رسیدهاند که آنها را از ابزار صرف، به همکاران دقیق و قابل اعتماد صنعت تبدیل میکند. این همان مسیر تکامل از «اتوماسیون» به «درک صنعتی» است — مسیری که آیندهی رباتیک، تولید و همکاری انسان و ماشین را شکل خواهد داد.
رفرنس دقیق مقاله
Iván Sánchez-Calleja, Rubén Ferrero-Guillén, Alberto Martínez-Gutiérrez, and Javier Díez-González,
“Integrating Industrial Robots Through a Contact Method,”
IEEE Access, vol. 13, October 2025, pp. 120345–120358
DOI: 10.1109/ACCESS.2025.3471120



{kind=link}
بدون نظر