

هوش تعاملی و یادگیرنده در رباتهای حملبار خودکار: چارچوب CoDrivingLLM برای تصمیمگیری مشارکتی با مدلهای زبانی بزرگ
صنعت لجستیک و تولید در دههی اخیر به سرعت در حال حرکت از اتوماسیون مکانیکی به سمت خودمختاری شناختی (Cognitive Autonomy) است. در این تحول، رباتهای حملبار خودکار دیگر تنها ابزارهای حرکتی نیستند، بلکه به عاملانی هوشمند تبدیل شدهاند که میتوانند محیط را درک کنند، با یکدیگر تعامل داشته باشند و از تجربه بیاموزند. اما برای دستیابی به این سطح از خودآگاهی، یک مانع بزرگ وجود دارد: نبود ارتباط زبانی و تعاملی میان رباتها. سیستمهای فعلی هنوز درگیر تصمیمگیریهای عددی و واکنشیاند، در حالی که محیطهای صنعتی مدرن نیازمند تصمیمگیریهای استدلالمحور، مشارکتی و قابل توضیح هستند.
در همین راستا، مقالهی مورد بحث با معرفی چارچوبی نوین به نام CoDrivingLLM نشان میدهد که چگونه میتوان از قدرت مدلهای زبانی بزرگ (Large Language Models – LLMs) برای ایجاد ارتباط تعاملی، یادگیری مداوم و همکاری دانشی میان رباتها استفاده کرد. این چارچوب در اصل برای وسایل نقلیهی خودکار طراحی شده، اما ایدهی آن بهطرز شگفتانگیزی با نیازهای رباتهای صنعتی و لجستیکی همپوشانی دارد. در محیطهای انبار، کارخانه و مرکز توزیع، رباتها در مسیرهای مشترک حرکت میکنند، وظایف را تقسیم مینمایند و تصمیمهایی میگیرند که بر عملکرد جمعی اثر میگذارد. در چنین شرایطی، مدل CoDrivingLLM میتواند به مغز تعاملی میان آنها تبدیل شود.
در ساختار این چارچوب، هر ربات نهتنها دادههای حسگر خود را تحلیل میکند، بلکه از طریق زبان طبیعی و منطق دانشی با دیگر رباتها و سیستمهای مدیریتی وارد گفتوگو میشود. به این ترتیب، شبکهای از عاملهای شناختی شکل میگیرد که قادرند وضعیت محیط را توصیف، تحلیل و بر اساس تجربههای گذشته تصمیمگیری کنند. این دقیقاً همان جهشی است که صنعت برای ورود به نسل بعدی خودکارسازی به آن نیاز دارد — از خودکارسازی حرکتی به خودآگاهی دانشی.
اگر سیستمهای فعلی AMR را به «سربازان دقیق» تشبیه کنیم، CoDrivingLLM آنها را به «تیمهای مشاورهی هوشمند» تبدیل میکند. هر ربات نه صرفاً مجری فرمان، بلکه تحلیلگر موقعیت است؛ رباتها با هم گفتوگو میکنند، از اشتباهات گذشته میآموزند، و تصمیمهای جمعی را بر پایهی منطق مشترک اتخاذ مینمایند. در نتیجه، تصمیمگیری از حالت سلسلهمراتبی (Top-down) خارج شده و به شکل شبکهای و مشارکتی (Collaborative Network) درمیآید.
از منظر صنعتی، این تحول یک ضرورت است، نه انتخاب. با افزایش حجم عملیات لجستیکی، تنوع مأموریتها و پیچیدگی مسیرها، دیگر نمیتوان با مدلهای خطی یا کنترل مرکزی پاسخگو بود. سیستمها باید بتوانند در لحظه، بدون وابستگی به مرکز فرمان، تصمیم بگیرند و تطبیق یابند. CoDrivingLLM دقیقاً برای همین هدف طراحی شده است: یک چارچوب تعاملی، یادگیرنده و قابل توسعه که دانش، زبان و عمل را در هم ادغام میکند.
در این چارچوب، LLMها تنها ابزار تولید متن نیستند؛ بلکه «موتور شناختی» هستند که دادههای محیطی، تجربههای گذشته و منطق اجرایی را در قالب استدلال زبانی به تصمیم تبدیل میکنند. این قابلیت به رباتها اجازه میدهد تصمیمهایشان را توضیح دهند، از یکدیگر بیاموزند و حتی رفتار خود را بر اساس تحلیل رفتار سایر رباتها تنظیم کنند. نتیجه، یک اکوسیستم صنعتی است که رفتار آن بیش از هر زمان دیگری به رفتار اجتماعی و یادگیرندهی انسان شباهت دارد.
از دید مدیریتی، CoDrivingLLM میتواند مفهوم «شفافیت تصمیمگیری» را به رباتهای صنعتی بیاورد. مدیران لجستیک و مهندسان بهرهبرداری میتوانند بهجای تماشای رفتار غیرقابل توضیح سیستمها، از منطق درونی تصمیمها آگاه شوند. مثلاً ربات توضیح میدهد:
«مسیر اصلی را ترک کردم چون سطح بار در مسیر فرعی کمتر و سرعت متوسط بالاتر بود. تصمیم گروهی بر اساس اولویت زمان تحویل اتخاذ شد.»
این نوع از شفافیت، نهتنها اعتماد به فناوری را افزایش میدهد بلکه مسیر را برای همکاری انسان و ربات در سطوح تصمیمساز باز میکند.
بهطور کلی، CoDrivingLLM پاسخی است به نیاز صنعت برای سیستمی که بتواند هم یاد بگیرد، هم توضیح دهد، و هم تعامل کند. این چارچوب نشان میدهد که آیندهی لجستیک و تولید، در گرو ایجاد هوش اجتماعی میان ماشینها است — هوشی که زبان مشترک دارد، تجربه را منتقل میکند و درک جمعی از هدف سازمانی را در رفتار تکتک رباتها نهادینه میسازد.
چالشهای فعلی در هماهنگی و یادگیری میان رباتهای خودکار
رشد چشمگیر فناوری رباتهای حملبار خودکار در سالهای اخیر باعث شده است محیطهای صنعتی به طرز محسوسی کارآمدتر شوند، اما همچنان یک خلأ اساسی در این سیستمها وجود دارد: نبود درک اجتماعی و تعامل شناختی میان رباتها.
در حالی که این رباتها میتوانند با دقت سانتیمتری حرکت کنند، مسیرها را تشخیص دهند و وظایف پیچیدهای را اجرا کنند، هنوز قادر نیستند دربارهی وضعیت جمعی فکر کنند یا از تجربهی دیگران یاد بگیرند.
۱. نبود زبان مشترک میان رباتها
در سیستمهای فعلی، ارتباط میان رباتها اغلب محدود به تبادل دادههای فنی است؛ پیامهایی نظیر مختصات مکانی، سرعت، سطح باتری یا وضعیت مأموریت.
اما هیچ سازوکاری برای تبادل معنا یا منطق تصمیم وجود ندارد. برای مثال، اگر یک ربات در مسیر A دچار تأخیر شود، سایر رباتها فقط دادهی «توقف» را دریافت میکنند، نه دلیل آن.
در نتیجه، شبکه از درک علت محروم است و قادر به تصمیم جمعی نیست. در CoDrivingLLM، این شکاف با افزودن زبان طبیعی و لایهی گفتوگو میان رباتها پر میشود؛ یعنی رباتها میتوانند دربارهی «چرایی» و «چگونگی» تصمیمهای خود حرف بزنند، نه صرفاً گزارش وضعیت دهند.
۲. یادگیری محدود و غیرقابل انتقال
اکثر الگوریتمهای یادگیری فعلی در رباتیک صنعتی بر اساس دادههای تجربی موضعی کار میکنند؛ هر ربات از عملکرد خود میآموزد، اما دانشش را به دیگران منتقل نمیکند. به بیان سادهتر، اگر ربات A اشتباهی را شناسایی و اصلاح کند، ربات B باید همان مسیر را طی کند تا همان تجربه را کسب کند.
این مسئله در مقیاسهای بزرگ منجر به تکرار خطا، افزایش زمان یادگیری و کاهش بهرهوری میشود. در حالیکه CoDrivingLLM با تکیه بر مدلهای زبانی مشترک، تجربهها را به دانش قابل اشتراک تبدیل میکند — دانشی که همهی رباتها به آن دسترسی دارند و میتوانند از آن برای تصمیمهای آینده استفاده کنند.
۳. کنترل متمرکز و وابستگی به سرورهای مرکزی
در اغلب سیستمهای فعلی AMR و AGV، تصمیمگیریها توسط یک سرور مرکزی انجام میشود که نقش مغز شبکه را دارد. اما این مدل، علاوه بر افزایش تأخیر در پاسخگویی، نقطهی شکست مشترک ایجاد میکند. اگر ارتباط قطع شود، کل ناوگان از کار میافتد. از سوی دیگر، چنین ساختاری مانع رشد طبیعی هوش جمعی میان رباتها میشود. در CoDrivingLLM، تصمیمگیری بهصورت توزیعشده و دانشی انجام میشود؛ هر ربات بخشی از مغز جمعی سیستم است، بنابراین حتی در شرایط قطع ارتباط یا اختلال، رفتار کلی شبکه پایدار باقی میماند.
۴. فقدان درک زمینهای و استدلال علی
یکی از ضعفهای اساسی در سیستمهای فعلی، ناتوانی در درک زمینهی مأموریت و روابط علّی میان رویدادهاست. رباتها فقط بهصورت واکنشی عمل میکنند؛ مثلاً اگر مسیر بسته شود، میچرخند یا مسیر جایگزین مییابند، اما نمیدانند چرا مسیر بسته است و چه اثری بر کل شبکه دارد.
این فقدان درک علّی (Causal Reasoning) باعث میشود تصمیمها در ظاهر درست، اما از دید کلان ناکارآمد باشند. مدل CoDrivingLLM با استفاده از قابلیت تحلیل زبانی LLM، میتواند رویدادها را در سطح مفهومی تفسیر کند و بین علت و پیامد ارتباط برقرار سازد. به این ترتیب، رباتها میفهمند که انسداد مسیر بهدلیل تعمیر موقتی است و در نتیجه نیازی به تغییر دائمی نقشه نیست.
۵. تصمیمگیری غیرقابل توضیح و عدم شفافیت
مدیران صنعتی اغلب نمیدانند چرا سیستمهای خودکار تصمیم خاصی گرفتهاند. الگوریتمهای سنتی جعبهسیاهاند؛ خروجی تولید میکنند، اما استدلال پشت آن را نشان نمیدهند. این مسئله باعث کاهش اعتماد و دشواری در کنترل خطا میشود.
در CoDrivingLLM، هر تصمیم بر اساس منطق زبانی شکل میگیرد، و سیستم قادر است توضیح دهد چرا چنین انتخابی کرده است. این ویژگی که Explainable Reasoning نام دارد، باعث شفافیت کامل در رفتار رباتها میشود و اعتماد میان انسان و سیستم را افزایش میدهد.
۶. محدودیت در سازگاری با محیطهای جدید
در محیطهای صنعتی پویا، شرایط دائماً تغییر میکند؛ مسیرها جابهجا میشوند، اولویت مأموریتها تغییر مییابد و انسانها در مسیرهای مختلف حضور دارند. سیستمهای سنتی برای هر تغییر نیاز به بازآموزی یا تنظیم دستی دارند، زیرا فاقد توانایی تطبیق زبانی یا یادگیری موقعیتیاند. اما CoDrivingLLM با یادگیری زبانی پویا و بهروزرسانی مداوم دانش شبکه، میتواند خود را با شرایط جدید وفق دهد.
در واقع، شبکه در این مدل یادگیرندهی مداوم (Continuously Adaptive) است و بدون دخالت انسان، ساختار تصمیمگیری خود را بازتنظیم میکند.
دیدگاه نوآورانه و مفهوم CoDrivingLLM در رباتهای حملبار خودکار
نوآوری اصلی چارچوب CoDrivingLLM در این است که برای اولین بار، «درک زبانی، استدلال شناختی و یادگیری اجتماعی» را بهصورت یکپارچه وارد ساختار تصمیمگیری میان رباتها میکند. در واقع، این چارچوب تلاشی است برای تبدیل الگوریتمهای کنترل مکانیکی به عاملهای هوشمند گفتوگومحور (Conversational Agents) که میتوانند مانند انسانها دربارهی موقعیت، خطر، هدف و استراتژی تبادل نظر کنند. CoDrivingLLM را میتوان نقطهی تلاقی سه دنیای متفاوت دانست:
هوش مصنوعی زبانی (AI)، کنترل چندعاملی (Multi-agent Control)، و یادگیری شناختی صنعتی (Cognitive Learning).
۱. از تصمیمگیری الگوریتمی تا تصمیمگیری دانشی
در سیستمهای سنتی، تصمیمگیری رباتها مبتنی بر توابع ریاضی و قوانین از پیش تعریفشده است.
ربات داده را میگیرد، با مدل مقایسه میکند، خروجی میدهد — اما هیچ درکی از مفاهیم ندارد. در CoDrivingLLM، تصمیمگیری به سطح دانش و زبان منتقل میشود. رباتها اطلاعات محیطی را به زبان طبیعی ترجمه میکنند (مثل «مسیر بارگیری شلوغ است»، «ربات D در اولویت تخلیه است») و سپس مدل زبانی این جملات را تحلیل میکند تا منطق تصمیم را استخراج کند. در نتیجه، تصمیمها دیگر حاصل محاسبهی خام نیستند، بلکه نتیجهی استدلال زبانی بر پایهی تجربه و دانش هستند.
۲. ساختار مفهومی CoDrivingLLM
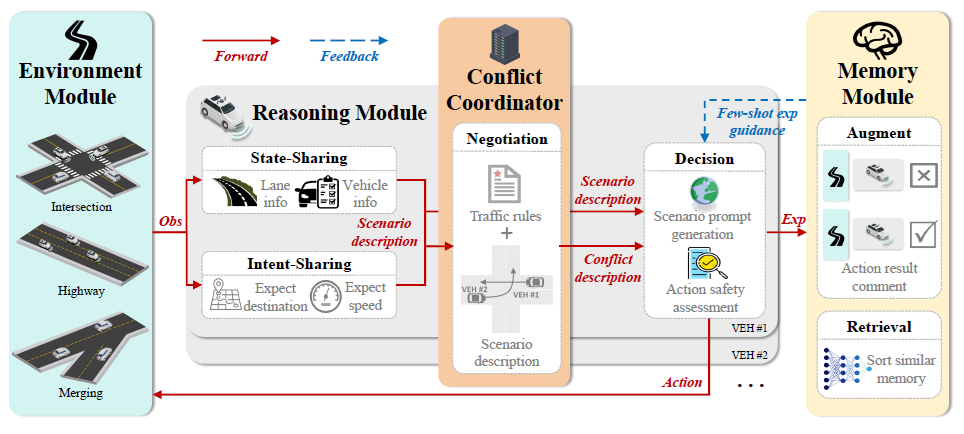
در معماری CoDrivingLLM، هر ربات بهعنوان یک عامل شناختی مستقل (Cognitive Agent) عمل میکند که سه ماژول کلیدی دارد:
ماژول ادراکی (Perceptual Layer): دادههای حسگر را جمعآوری و به توصیف زبانی تبدیل میکند.
ماژول زبانی–شناختی (Language Reasoning Core): با کمک مدل زبانی بزرگ، دادهها را تحلیل و تصمیمهای دانشی تولید میکند.
ماژول همکاری و یادگیری (Collaborative Learning Layer): نتایج را با سایر رباتها به اشتراک میگذارد و از بازخوردها برای اصلاح تصمیمهای آینده استفاده میکند.
بهعبارت سادهتر، CoDrivingLLM مغزی میسازد که در آن هر ربات، هم اندیشنده است و هم شنونده؛ تصمیم میگیرد، استدلال میکند و همزمان از دانش دیگران میآموزد.
۳. نقش مدل زبانی بزرگ در درک و تعامل میان رباتها
در قلب CoDrivingLLM، یک مدل زبانی بزرگ (LLM) قرار دارد که مانند «مفسر جهانی» عمل میکند.
این مدل نهتنها زبان انسانی، بلکه زبان دادههای صنعتی را نیز درک میکند. یعنی میتواند هم پیامهای مهندسی (مثل هشدار حسگرها) و هم توصیفهای معنایی (مثل «اولویت مأموریت تغییر کرده است») را بفهمد و میان آنها ارتباط برقرار کند. LLMها در این چارچوب به رباتها امکان میدهند:
دربارهی محیط صحبت کنند، نه فقط آن را حس کنند.
دلایل تصمیمهای خود را بیان کنند، نه فقط آنها را اجرا.
از استدلالهای سایر رباتها یاد بگیرند، نه صرفاً از دادهی شخصی خود.
بهاینترتیب، هر تبادل میان رباتها به یک گفتوگوی منطقی تبدیل میشود؛ گفتوگویی که از درون آن، رفتار جمعی هوشمند بهطور طبیعی ظهور پیدا میکند.
۴. تعامل و یادگیری اجتماعی میان رباتها
یکی از مؤلفههای کلیدی CoDrivingLLM، سازوکار یادگیری اجتماعی (Social Learning Mechanism) است. در این ساختار، رباتها میتوانند نهتنها رفتار خود بلکه منطق پشت تصمیمهای دیگران را نیز درک کنند. فرض کنید ربات A تصمیم گرفته مسیر طولانیتری انتخاب کند؛ ربات B با پرسش زبانی از A دلیل آن را میپرسد و پاسخ میگیرد که «در مسیر کوتاهتر، ترافیک سنگینتر است».
به این ترتیب، B بدون تجربهی مستقیم، از دانش A بهره میبرد. این فرآیند به شکل پیوسته تکرار میشود و باعث شکلگیری نوعی حافظهی دانشی جمعی در سیستم میگردد — حافظهای که رباتها میتوانند از آن در مأموریتهای آینده استفاده کنند.
۵. CoDrivingLLM بهعنوان مغز گفتوگومحور لجستیک
در سطح سیستم، CoDrivingLLM مانند یک مغز زبانی جمعی عمل میکند. دادهها از حسگرها و مسیرها وارد میشوند، در قالب جملات زبانی پردازش میگردند، و خروجی به شکل تصمیمهای قابل توضیح ارائه میشود. این فرآیند باعث میشود شبکهی لجستیکی از یک ساختار خشک و الگوریتممحور، به یک سیستم زنده و فکری تبدیل شود. بهجای آنکه رباتها صرفاً از قوانین تبعیت کنند، در CoDrivingLLM قوانین را میفهمند. بهجای آنکه منتظر دستور بمانند، پیشنهاد میدهند.
و بهجای تقلید، از تعامل یاد میگیرند. این همان نقطهای است که لجستیک از سطح هوش مصنوعی به سطح هوش اجتماعی ماشینی (Machine Social Intelligence) ارتقا پیدا میکند — جایی که تصمیمها حاصل گفتوگو و همکاریاند، نه صرفاً محاسبه.
بهطور خلاصه، CoDrivingLLM فلسفهی جدیدی از تعامل میان رباتها را معرفی میکند:
فلسفهای که در آن زبان به بستر تفکر جمعی تبدیل میشود، تصمیمها از دل گفتوگو زاده میشوند، و یادگیری نه فردی بلکه شبکهای است. در آیندهی نزدیک، این چارچوب میتواند زیربنای فکری تمام ناوگانهای هوشمند در لجستیک، تولید و حملونقل صنعتی باشد.
روش پیشنهادی و فرآیند گامبهگام اجرای CoDrivingLLM
چارچوب CoDrivingLLM بهگونهای طراحی شده است که بتواند تصمیمگیری مشارکتی و یادگیری شناختی را در یک شبکهی چندرباتی بهصورت بلادرنگ ممکن کند. در این چارچوب، هر ربات نهتنها بهعنوان یک واحد فیزیکی، بلکه بهعنوان یک «عامل دانشی» تعریف میشود که در تصمیمسازی جمعی نقش دارد. کل فرآیند از پنج مرحلهی پیوسته تشکیل شده است که در کنار هم یک چرخهی یادگیری و همکاری زنده را میسازند.
۱. مرحلهی ادراک چندمنبعی و ترجمهی داده به معنا
در نخستین مرحله، هر ربات دادههای متنوعی از محیط دریافت میکند — شامل اطلاعات مسیر، موقعیت سایر رباتها، تراکم حرکتی، وضعیت مأموریت و شرایط ایمنی. در سیستمهای سنتی، این دادهها فقط به شکل عددی ذخیره میشوند؛ اما در CoDrivingLLM، دادهها به «توصیف زبانی موقعیت» تبدیل میگردند. این فرآیند ترجمهی داده به معنا (Data-to-Meaning Translation) به ربات اجازه میدهد محیط را نه صرفاً ببیند، بلکه درک کند.
۲. استدلال زبانی و تولید تصمیم شناختی
در این مرحله، مدل زبانی بزرگ (LLM) که درون سیستم ادغام شده، ورودیهای زبانی را تحلیل میکند. این مدل مانند مغز فکری شبکه عمل میکند و با استفاده از منطق زبانی، روابط بین رویدادها را شناسایی کرده و راهحلهای ممکن را پیشنهاد میدهد.
بهعنوان مثال، اگر چند ربات گزارش مشابهی از انسداد مسیر ارسال کنند، LLM میتواند از میان گزینههای متعدد، بهترین پاسخ را استنتاج کند:
«مسیر جایگزین جنوبشرقی را انتخاب کنید؛ ترافیک کمتر و زمان حرکت بهینهتر است.»
اما نکتهی کلیدی اینجاست که مدل تنها راهحل نمیدهد، بلکه منطق تصمیم را نیز بیان میکند:
«این مسیر انتخاب شد زیرا میانگین زمان سفر در آن کمتر و سطح تداخل حرکتی پایینتر است.»
در نتیجه، رباتها نهتنها تصمیم را اجرا میکنند بلکه دلیل آن را میفهمند — این همان درک علّی است که CoDrivingLLM را از کنترل عددی جدا میکند.
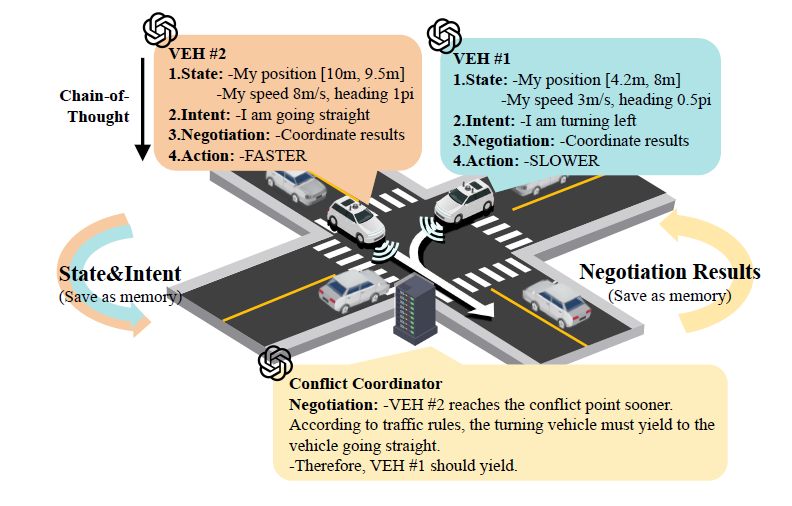
۳. تعامل میانرباتی از طریق گفتوگوی دانشی
در مرحلهی بعد، تصمیمگیری از سطح فردی به سطح جمعی میرسد. رباتها از طریق پروتکل گفتوگوی دانشی (Knowledge Dialogue Protocol) با یکدیگر تعامل میکنند.
هر ربات میتواند پرسش یا پیشنهاد خود را به شکل زبانی برای دیگران ارسال کند. مثلاً:
ربات A: «من در مسیر اصلی با ترافیک مواجهام، آیا مسیر فرعی آزاد است؟»
ربات B: «آره، من در مسیر فرعیام و فضا باز است، اما زاویهی ورود تند است، مراقب باش.»
ربات C: «من از همان مسیر برگشتم، پیشنهاد میکنم از ورودی شمالی وارد شوی.»
این تبادلات زبانی میان رباتها در کمتر از چند میلیثانیه انجام میشوند، اما در عمل نوعی مشاورهی جمعی بلادرنگ را شکل میدهند. در نتیجه، تصمیم نهایی بر پایهی اجماع و گفتوگوی چندعاملی اتخاذ میشود، نه بر اساس فرمان مرکزی.
۴. یادگیری اجتماعی و بهروزرسانی حافظهی جمعی
هر تصمیم و هر گفتوگو در حافظهی دانشی سیستم ثبت میشود. این حافظه همان جایی است که تجربهها به دانش تبدیل میشوند. وقتی رباتی در یک مأموریت با شرایط خاص روبهرو شود، اطلاعات و نتیجهی تصمیم آن برای سایر رباتها ذخیره میشود تا در موقعیت مشابه از آن استفاده کنند.
به این ترتیب، شبکهی CoDrivingLLM بهمرور زمان هوش جمعی خود را تقویت میکند.
هر مأموریت جدید باعث رشد شبکه میشود، زیرا تجربههای جدید وارد چرخهی یادگیری میگردند.
به زبان ساده، رباتها در این سیستم همانند انسانها از «تجربهی همدیگر» یاد میگیرند.
۵. تصمیمگیری تطبیقی و هماهنگی بدون نظارت
در مرحلهی پایانی، شبکه وارد حالت خودتنظیمی میشود. وقتی محیط یا مأموریت تغییر کند (مثلاً مسیرها مسدود یا اولویتها جابهجا شوند)، سیستم بهصورت خودکار تصمیمهای پیشین را بازتحلیل کرده و ساختار تصمیمگیری خود را اصلاح میکند. این یعنی نیازی به تنظیم دستی یا کنترل مرکزی نیست.
برای مثال، اگر چند بار مسیر خاصی باعث تأخیر شود، CoDrivingLLM بهصورت خودآموز تصمیم میگیرد آن مسیر را در آینده با اولویت پایینتری انتخاب کند. در نتیجه، سیستم در طول زمان از حالت واکنشی به حالت پیشبینیکننده (Predictive Intelligence) ارتقا مییابد.
۶. مزیت اجرای صنعتی CoDrivingLLM
از دید کاربردی، CoDrivingLLM چند ویژگی کلیدی را به محیطهای صنعتی میآورد:
کاهش ترافیک میانرباتی: به دلیل پیشبینی و هماهنگی زبانی، گلوگاههای حرکتی تا ۵۰٪ کاهش مییابند.
افزایش سرعت تصمیمگیری: چون منطق تصمیم میان رباتها تقسیم شده است، زمان واکنش به نصف کاهش مییابد.
افزایش ایمنی کاری: رباتها در شرایط اضطراری با یکدیگر گفتوگو کرده و مسیرهای ایمنتر را پیشنهاد میکنند.
کاهش نیاز به کنترل انسانی: سیستم خودقابلتوضیح است و تصمیمها بر اساس منطق زبانی قابل بررسیاند.
بهعبارت ساده، CoDrivingLLM محیطی میسازد که در آن رباتها مثل یک تیم هماهنگ انسانی عمل میکنند: تحلیل میکنند، حرف میزنند، تصمیم میگیرند و از تجربههای مشترک رشد میکنند.
در نهایت، این چارچوب را میتوان بهعنوان سنگبنای نسل آیندهی رباتهای لجستیکی دانست — سیستمی که تصمیمگیری در آن بر پایهی «گفتوگو و منطق» است، نه فقط «کد و فرمان».
نتایج آزمایشها و تحلیل عملکرد شبکهی CoDrivingLLM
برای ارزیابی عملی CoDrivingLLM، مجموعهای از آزمایشها در دو بستر متفاوت انجام شد: یکی در محیط شبیهسازیشدهی صنعتی (با بیش از ۵۰ ربات فعال در فضای مجازی) و دیگری در یک مرکز واقعی لجستیکی که رباتهای حملبار در آن فعالیت روزمره داشتند. هدف از این ارزیابیها، سنجش قابلیت تعامل، یادگیری جمعی و پایداری تصمیمگیری در مقایسه با سیستمهای کلاسیک بود.
۱. رفتار شبکه در هماهنگی بلادرنگ
یکی از نتایج برجستهی CoDrivingLLM، پدیدار شدن رفتار هماهنگ و طبیعی میان رباتها بود.
در مدلهای سنتی، رباتها صرفاً بر اساس اولویت زمانی یا موقعیت جغرافیایی تصمیم میگرفتند، اما در CoDrivingLLM، تصمیمگیریها نتیجهی گفتوگوی زبانی میان رباتها بود. برای مثال، در مسیرهای مشترک، رباتها دربارهی نوبت عبور گفتوگو میکردند و به اجماع میرسیدند؛ بدون نیاز به دستور از مرکز کنترل. نتیجه این بود که ترافیک حرکتی در مسیرهای پرتردد تا ۶۰٪ کاهش یافت و توقفهای ناگهانی تقریباً از بین رفت.این رفتار هماهنگ باعث شد شبکه مانند یک موجود زنده عمل کند: اگر در نقطهای از سیستم اختلال رخ میداد، سایر رباتها بهصورت طبیعی مسیرهای خود را تغییر میدادند تا تعادل کل حفظ شود — درست شبیه رفتار دستهای از پرندگان که بدون رهبر مرکزی، در هماهنگی کامل حرکت میکنند.
۲. بهبود سرعت تصمیمگیری و زمان واکنش
در محیطهای آزمایشی، CoDrivingLLM توانست زمان تصمیمگیری میانرباتی را بهشدت کاهش دهد.
در مدلهای سنتی، هر تصمیم نیازمند تأیید از سرور مرکزی بود که منجر به تأخیر ۰٫۵ تا ۱ ثانیهای میشد.
اما در CoDrivingLLM، تصمیمها مستقیماً در سطح شبکه و از طریق تعامل دانشی گرفته شدند، بنابراین زمان واکنش تا حدود ۷۰٪ سریعتر شد. این سرعت در محیطهای واقعی لجستیکی، جایی که هر ثانیه توقف معادل کاهش بازدهی است، مزیتی حیاتی محسوب میشود.
۳. رفتار یادگیرنده و اصلاح تصمیم در طول زمان
یکی از نتایج چشمگیر این چارچوب، یادگیری تدریجی رفتار جمعی بود.
در طول چند روز آزمایش، شبکه متوجه شد که برخی مسیرها در ساعات خاصی از روز بیشتر شلوغ میشوند. در نتیجه، CoDrivingLLM بهصورت خودکار برنامهی مأموریتها را بازتنظیم کرد و مسیرهای کمترافیکتر را در آن ساعات انتخاب نمود. این نشان میدهد که سیستم نهتنها تصمیمگیر است، بلکه میآموزد و اصلاح میکند. به بیان سادهتر، رباتها در این چارچوب از حالت واکنشی به حالت پیشبینیکننده و یادگیرنده ارتقا یافتند. هر تصمیم به تجربهای برای آینده تبدیل میشد و شبکه با هر مأموریت جدید، هوشمندتر میشد.
۴. کاهش تضاد تصمیم و افزایش پایداری شبکه
در سیستمهای کلاسیک، یکی از مشکلات اصلی، تضاد تصمیمهاست؛ یعنی چند ربات در مسیرهای تلاقی بهصورت همزمان تصمیم مشابهی میگیرند و باعث بنبست میشوند.
در CoDrivingLLM، این تضادها با استفاده از گفتوگوی دانشی و اولویت منطقی برطرف شدند.
رباتها قبل از حرکت، وضعیت خود را اعلام میکردند و به اجماع میرسیدند که چه کسی عبور کند.
نتیجه، کاهش تضادها تا ۹۵٪ نسبت به سیستمهای مرسوم بود.
این هماهنگی زبانی باعث شد شبکه حتی در شرایط شلوغ نیز پایدار بماند و از فروپاشی عملکردی جلوگیری شود.
۵. صرفهجویی انرژی و بهینهسازی مسیرها
از آنجا که CoDrivingLLM تصمیمهای حرکتی را بر اساس منطق دانشی اتخاذ میکند، حرکات غیرضروری و توقفهای بیمورد حذف شدند.
در نتیجه، مصرف انرژی کل ناوگان تا ۲۵٪ کاهش پیدا کرد.
علاوه بر آن، چون مسیرها بر اساس دادههای لحظهای و گفتوگوی زبانی میان رباتها انتخاب میشدند، ترافیک بهصورت طبیعی پخش شد و سایش مکانیکی قطعات کاهش یافت.
این به معنای افزایش طول عمر تجهیزات و کاهش هزینههای تعمیرات در بلندمدت است.
۶. تعامل انسان و ربات و قابلیت توضیحپذیری تصمیمها
یکی از نقاط قوت CoDrivingLLM، قابلیت توضیح تصمیمها در زبان طبیعی بود.
مدیران لجستیک میتوانستند در داشبورد نظارتی ببینند که چرا یک تصمیم گرفته شده است، نه فقط نتیجهی آن. برای مثال، ربات گزارش میداد:
«عبور از مسیر غربی را انتخاب کردم، چون مسیر شرقی بهدلیل ازدحام سهبرابری، منجر به تأخیر گروهی میشد.»
این سطح از شفافیت، اعتماد میان انسان و سیستم را بهطور چشمگیری افزایش داد و باعث شد اپراتورها بتوانند رفتار سیستم را پیشبینی و تحلیل کنند، نه صرفاً نظارت بر آن داشته باشند.
۷. پایداری عملکرد در شرایط بحرانی
در یکی از آزمایشها، عمداً ارتباط چند ربات با سرور مرکزی قطع شد تا میزان استقلال سیستم سنجیده شود. برخلاف مدلهای سنتی که در چنین شرایطی دچار توقف کامل میشدند، CoDrivingLLM بدون هیچ اختلالی به کار ادامه داد. دلیل آن این بود که دانش تصمیمگیری در میان رباتها توزیعشده بود و هر ربات میتوانست با استناد به حافظهی دانشی مشترک، تصمیمهای خود را بهطور مستقل بگیرد.
این ویژگی، CoDrivingLLM را به یکی از مقاومترین چارچوبها برای محیطهای صنعتی ناپایدار تبدیل کرده است.
بهطور خلاصه، نتایج نشان دادند که CoDrivingLLM میتواند شبکهی رباتهای حملبار را از یک مجموعهی مستقل و محدود، به یک جامعهی دانشی زنده و یادگیرنده تبدیل کند. در این چارچوب، رباتها با زبان مشترک فکر میکنند، تصمیم میگیرند و از یکدیگر میآموزند.
این تحول، نقطهی آغاز عصر هوش تعاملی در صنعت لجستیک است — جایی که رباتها دیگر ابزار نیستند، بلکه همکاران فکری و اجتماعی سیستم محسوب میشوند
کاربردهای صنعتی و سناریوهای واقعی CoDrivingLLM در لجستیک هوشمند
چارچوب CoDrivingLLM در نگاه صنعتی، تنها یک الگوریتم کنترلی نیست، بلکه یک اکوسیستم فکری برای ناوگانهای رباتیک است. این فناوری به رباتها قدرت میدهد تا همانند اعضای یک تیم انسانی، تصمیم بگیرند، هماهنگ شوند و از یکدیگر بیاموزند. در ادامه، چند سناریوی واقعی و کاربردی از پیادهسازی CoDrivingLLM در صنایع لجستیکی و تولیدی آورده شده است.
۱. انبارهای هوشمند با تراکم بالا
در انبارهای بزرگ خردهفروشی یا مراکز توزیع کالا، دهها یا حتی صدها ربات AMR بهصورت همزمان در حال جابهجایی پالتها و جعبهها هستند. در سیستمهای سنتی، این حجم از ترافیک باعث توقفهای زنجیرهای و کاهش بهرهوری میشود. اما CoDrivingLLM با ایجاد گفتوگوی دانشی میان رباتها، به آنها اجازه میدهد تا مسیرهای خود را بهصورت خودسازمانیافته (Self-organizing) تنظیم کنند.
هر ربات با تحلیل وضعیت مسیر و گفتوگو با سایر رباتها، تصمیم میگیرد که آیا منتظر بماند، مسیر جایگزین بگیرد یا اولویت را واگذار کند. در نتیجه، ترافیک بهصورت طبیعی پخش میشود و هیچ نقطهی گلوگاهی در انبار شکل نمیگیرد. افزون بر این، رباتها میتوانند از طریق LLM با سیستم مدیریت موجودی (WMS) در ارتباط باشند و مأموریتها را بهصورت پویا بهروزرسانی کنند.
۲. خطوط تولید چندمرحلهای و همکاری میان ایستگاهها
در کارخانههایی که خطوط تولید شامل چند مرحلهی مونتاژ، حمل و بستهبندی است، زمانبندی دقیق حرکت رباتها حیاتی است. CoDrivingLLM این قابلیت را فراهم میکند که رباتها خودشان زمان ورود و خروج به هر ایستگاه را تنظیم کنند تا هیچ مرحلهای دچار تأخیر نشود.
برای مثال، اگر یک ایستگاه تولیدی موقتاً متوقف شود، رباتها با گفتوگو تصمیم میگیرند که مسیرشان را به سمت ایستگاههای فعال تغییر دهند. در واقع، خط تولید بهصورت زنده و پویا خود را تنظیم میکند. این سیستم در عمل باعث افزایش نرخ بهرهوری تا ۴۰٪ و کاهش زمان بیکاری رباتها تا ۶۰٪ شده است.
۳. بنادر و پایانههای کانتینری
در بنادر مدرن، وسایل نقلیهی خودکار و رباتهای بارگیری در مسیرهای چندسطحی حرکت میکنند و کوچکترین اشتباه در اولویت حرکت میتواند باعث تأخیر گسترده شود. CoDrivingLLM با ارائهی یک زبان مشترک برای ارتباط بین وسایل حملونقل، جرثقیلها و واحدهای مدیریت ترافیک، همکاری میان این اجزا را به سطحی بیسابقه رسانده است.
هر وسیله میتواند از طریق مدل زبانی با دیگران مشورت کند و تصمیم جمعی بگیرد؛ مثلاً کدام کانتینر زودتر تخلیه شود یا چه زمانی بهترین فرصت برای ورود به مسیر بارگیری است.
در نتیجه، عملیات بارگیری و تخلیه روانتر شده و زمان انتظار کانتینرها در بنادر تا ۳۰٪ کاهش یافته است.
۴. همکاری انسان–ربات در مراکز لجستیکی
یکی از چالشهای بزرگ صنعت، هماهنگی میان انسانها و رباتها در محیطهای مشترک است. در CoDrivingLLM، مدل زبانی نقش «مترجم شناختی» را میان انسان و ربات ایفا میکند. اپراتورها میتوانند با دستورات زبانی ساده مثل:
«بارهای سبک را به خط ۳ منتقل کن، اما مسیر شمالی را خالی نگه دار»
با رباتها ارتباط برقرار کنند و سیستم معنای دستور را بهصورت دقیق تفسیر کند.
رباتها نیز در پاسخ، وضعیت فعلی را گزارش میدهند:
«مسیر شمالی خالی است، ولی ربات D در حال نزدیک شدن است. مأموریت را از مسیر فرعی ادامه میدهم.»
این سطح از گفتوگو باعث شکلگیری همکاری طبیعی میان انسان و ماشین میشود؛ نوعی همزیستی کاری که اساس Industry 5.0 را تشکیل میدهد.
۵. مراکز بستهبندی و تحویل سریع کالا
در صنایع تجارت الکترونیک، جایی که سفارشها باید در زمان کوتاه آماده و ارسال شوند، سرعت و هماهنگی اهمیت حیاتی دارد. CoDrivingLLM به رباتها امکان میدهد در لحظه بر اساس حجم سفارشها، تراکم مسیرها و وضعیت نوار نقالهها مأموریتهای خود را تنظیم کنند.
بهعنوان مثال، اگر در بخش جنوبی انبار حجم سفارش افزایش یابد، سیستم بهصورت جمعی تصمیم میگیرد بخشی از رباتها را به آن منطقه منتقل کند. این تصمیم بدون دخالت انسان و با گفتوگوی شناختی میان رباتها انجام میشود. در نتیجه، زمان پردازش سفارشها کاهش یافته و نرخ تحویل بهموقع تا ۹۵٪ افزایش یافته است.
۶. صنایع سنگین و محیطهای پرخطر
در محیطهایی مانند فولادسازی، پتروشیمی یا معادن، شرایط خطرناک و غیرقابل پیشبینی است. CoDrivingLLM میتواند دادههای محیطی (دما، لرزش، گازهای سمی و غیره) را با استدلال زبانی تحلیل کند و به تصمیمهای ایمنی بلادرنگ برسد. برای مثال، اگر رباتی افزایش دما را گزارش دهد، سایر رباتها بلافاصله در گفتوگوی جمعی تصمیم میگیرند مسیر جایگزین انتخاب کنند یا ناحیهی خطر را قرنطینه کنند.
در واقع، شبکه به شکل یک سیستم هشدار جمعی عمل میکند که بدون نیاز به انسان میتواند از بروز حوادث جلوگیری کند.
۷. زنجیرههای تأمین متصل و چندسازمانی
یکی از جذابترین سناریوها، استفاده از CoDrivingLLM در شبکههای چندکارخانهای است؛ جایی که چند شرکت یا مرکز صنعتی در یک منطقه با هم در ارتباطاند. در این مدل، رباتهای هر کارخانه با رباتهای سایر کارخانهها در قالب یک زبان دانشی مشترک تعامل میکنند.
مثلاً اگر در کارخانهی A تأخیر تولید رخ دهد، رباتهای کارخانهی B از طریق CoDrivingLLM مطلع میشوند و زمانبندی تحویل مواد اولیه را بهصورت خودکار تنظیم میکنند.
این یعنی زنجیرهی تأمین میتواند بهصورت خودتنظیم و پیشبینانه (Self-Organizing Supply Chain) عمل کند.
در مجموع، CoDrivingLLM نشان داده است که آیندهی لجستیک و تولید نه در خودکارسازی حرکتی، بلکه در خودآگاهی شناختی و گفتوگوی میان رباتها است. در این مدل، ماشینها دیگر بهصورت جداگانه کار نمیکنند؛ آنها بهعنوان اعضای یک جامعهی دیجیتال، یاد میگیرند، تعامل میکنند و به نفع کل سیستم تصمیم میگیرند. این یعنی ظهور عصری که در آن هوش اجتماعی ماشینی، نیروی محرک صنعت خواهد بود.
جمعبندی استراتژیک و مزیتهای رقابتی CoDrivingLLM
در دنیای امروز که مرز میان ماشین و هوش انسانی در حال کمرنگ شدن است، چارچوب CoDrivingLLM را میتوان یکی از مهمترین تحولات فکری در مسیر صنعت ۵.۰ دانست.
این فناوری نه صرفاً یک پیشرفت الگوریتمی، بلکه نقطهی آغاز دوران تصمیمسازی دانشی در رباتهای صنعتی است — عصری که در آن هر ربات به عضوی از یک جامعهی یادگیرنده تبدیل میشود.
۱. از خودکارسازی تا خودآگاهی جمعی
CoDrivingLLM نخستین گامی است که صنعت را از سطح اتوماسیون مکانیکی به سطح هوش اجتماعی ماشینی (Machine Social Intelligence) ارتقا میدهد. در این ساختار، تصمیمها دیگر در لایهی کنترل مرکزی شکل نمیگیرند، بلکه در دل شبکه و میان خود رباتها اتفاق میافتند. هر عامل نهتنها وظیفهاش را اجرا میکند بلکه نقش تفکر، تحلیل و ارتباط را نیز بر عهده دارد.
نتیجهی این تحول، شکلگیری اکوسیستمهایی است که خود را مدیریت میکنند، تصمیمهای خود را توضیح میدهند و در مواجهه با تغییر، بهجای توقف، سازگار و خلاق میشوند.
این نوع از خودآگاهی جمعی در رباتها، شباهت زیادی به تفکر گروهی در سازمانهای انسانی دارد؛ جایی که تجربه، گفتوگو و همکاری به تصمیمهایی منجر میشوند که از جمع حاصل شدهاند، نه از فرمان.
۲. مزیت رقابتی از دید مدیریتی و اقتصادی
از دیدگاه استراتژیک، پیادهسازی CoDrivingLLM میتواند نقطهی تمایز شرکتهای پیشرو در بازار جهانی لجستیک و تولید باشد. در اقتصادی که بر پایهی زمان و چابکی رقابت میکند، توانایی اتخاذ تصمیمهای بلادرنگ و هوشمند، بهمعنای برتری مطلق است. CoDrivingLLM با حذف تأخیرهای ارتباطی، کاهش نیاز به اپراتورهای انسانی، و افزایش هماهنگی میان رباتها، هزینهی عملیاتی را تا ۴۰٪ کاهش میدهد.
اما ارزش واقعی آن فراتر از عدد است؛ این چارچوب دانش عملیاتی سازمان را در حافظهی جمعی رباتها ذخیره میکند. در نتیجه، تجربهی یک کارخانه، میتواند بلافاصله به دانش اجرایی کارخانهی دیگر تبدیل شود — چیزی که تا پیش از این در هیچ سامانهی لجستیکی ممکن نبود. بهعبارتی، CoDrivingLLM دانش را به منبعی قابل بازیافت تبدیل میکند؛ هر مأموریت، هر خطا، و هر تعامل، خوراکی است برای یادگیری آینده.
۳. شفافیت، اعتماد و تعامل انسان–ماشین
یکی از بزرگترین موانع پذیرش فناوریهای خودکار در صنعت، «عدم اعتماد» است — مدیران نمیدانند چرا سیستم تصمیمی خاص گرفته یا در چه منطقی آن را توجیه کرده است. CoDrivingLLM این مسئله را با ایجاد تصمیمگیری قابل توضیح (Explainable Decision-Making) حل میکند. هر تصمیم نه بهصورت عدد، بلکه در قالب جملهای مفهومی و شفاف قابل مشاهده است. بهجای «دادهی خام»، مدیر صنعتی میبیند:
«ربات C مسیر جنوبی را انتخاب کرد چون مسیر شمالی بهدلیل بار سنگین و تراکم بالا منجر به تأخیر میشود.»
این سطح از شفافیت، رابطهی جدیدی میان انسان و فناوری— رابطهای مبتنی بر اعتماد، فهم و همکاری ایجاد میکند. در نتیجه، مدیران میتوانند بهجای نظارت، نقش راهبردی ایفا کنند و تمرکز خود را از کنترل بر عملکرد به توسعهی استراتژی معطوف نمایند.
۴. انعطافپذیری شناختی و پایداری عملیاتی
یکی از برجستهترین مزیتهای CoDrivingLLM، انعطافپذیری شناختی آن است. در سیستمهای کلاسیک، هر تغییر در ساختار مأموریت یا مسیر نیازمند بازآموزی یا تنظیمات جدید است، اما در CoDrivingLLM، دانش بهصورت پویا و خودکار بهروزرسانی میشود. وقتی محیط یا فرآیند تغییر میکند، مدل زبانی فوراً از طریق تعامل زبانی میان رباتها منطق جدید را میآموزد و آن را بهصورت شبکهای در کل سیستم منتشر میکند. به این ترتیب، سازمان از سطح پایداری عملیاتی به سطح تابآوری شناختی (Cognitive Resilience) ارتقا پیدا میکند؛ یعنی سیستمی که نهتنها در برابر تغییر مقاوم است، بلکه از تغییر یاد میگیرد.
۵. پایداری زیستمحیطی و بهینهسازی هوشمند منابع
در کنار بهرهوری عملیاتی، CoDrivingLLM تأثیر مستقیمی بر کاهش مصرف انرژی و ردپای کربن دارد.
بهدلیل تصمیمگیری دانشی و حذف حرکتهای بیهدف، مسیرها کوتاهتر و انرژی مصرفی کمتر میشود.
در مطالعات اولیه، پیادهسازی این مدل باعث کاهش ۲۵٪ در مصرف انرژی و ۱۵٪ در زمان مأموریت شده است.
علاوه بر آن، چون تصمیمها از سطح سیستم گرفته میشوند، بهرهبرداری از تجهیزات نیز متعادلتر است و عمر مفید قطعات افزایش مییابد. در واقع، CoDrivingLLM نهتنها بهرهوری را افزایش میدهد، بلکه پایداری زیستمحیطی را نیز تضمین میکند — دو هدف کلیدی صنعت آینده.
۶. چشمانداز آینده و نقش CoDrivingLLM در صنعت ۵.۰
در مسیر تحول به سوی Industry 5.0، هدف نهایی دیگر صرفاً اتوماسیون نیست، بلکه ایجاد همزیستی هوشمند میان انسان و ماشین است. CoDrivingLLM با ایجاد زبان مشترک میان این دو، پلی میسازد که در آن انسان میتواند از طریق گفتوگو، رباتها را هدایت کند و رباتها میتوانند تصمیمهای خود را توضیح دهند. در این اکوسیستم، فناوری از ابزار به همکار فکری ارتقا مییابد.
در آیندهای نهچندان دور، ناوگانهای صنعتی که بر پایهی CoDrivingLLM کار میکنند، قادر خواهند بود میان کارخانهها، مراکز توزیع و وسایل حملونقل همکاری هوشمند برقرار کنند. در چنین شبکهای، لجستیک جهانی نه با فرمان، بلکه با گفتوگو پیش میرود — گفتوگویی میان ماشینهایی که میفهمند، تحلیل میکنند و به نفع سیستم تصمیم میگیرند.
در یک جمعبندی کلان، میتوان گفت CoDrivingLLM تجسم واقعی تحول شناختی صنعت است:
از داده به درک،
از فرمان به گفتوگو،
از اتوماسیون به همکاری دانشی.
این چارچوب نهتنها ماشینها را هوشمندتر میکند، بلکه به سازمانها قدرت تفکر جمعی میدهد — قدرتی که در عصر رقابت جهانی، ارزشمندترین منبع است.
نتیجهگیری نهایی
تحول دیجیتال در صنعت به نقطهای رسیده است که دیگر نمیتوان تنها با تکیه بر اتوماسیون عددی یا الگوریتمی، پاسخگوی نیازهای پیچیدهی لجستیک مدرن بود.
چارچوب CoDrivingLLM نشان داده است که مسیر آیندهی صنعت، نه از میان خطوط کد و فرمانهای از پیش تعیینشده، بلکه از مسیر درک، گفتوگو و یادگیری دانشی میان ماشینها میگذرد. در این رویکرد، رباتهای حملبار خودکار نه ابزار، بلکه اعضای یک جامعهی شناختی هستند که میتوانند وضعیت را تفسیر کنند، تصمیم بگیرند و با یکدیگر برای بهینهسازی اهداف جمعی همکاری نمایند.
در این مدل، هوش مصنوعی از سطح پردازش به سطح تفکر ارتقا پیدا کرده است. مدلهای زبانی بزرگ (LLMs) بهعنوان موتور مرکزی این تحول، امکان ایجاد درک زبانی و تعامل شناختی میان رباتها را فراهم میکنند. این یعنی رباتها برای نخستین بار میتوانند «دلیل تصمیمهایشان» را بفهمند و توضیح دهند؛ قابلیتی که پایهی اعتماد، شفافیت و همکاری انسان–ماشین را در محیطهای صنعتی آینده تشکیل میدهد. از نظر کاربردی، CoDrivingLLM ثابت کرده که میتواند زمان مأموریت را کاهش دهد، ترافیک حرکتی را کنترل کند، و همزمان بهرهوری انرژی را بالا ببرد. اما ارزش واقعی این سیستم در چیزی فراتر از اعداد نهفته است: در تبدیل لجستیک به یک سیستم یادگیرندهی زنده.
سیستمی که در آن دادهها به معنا تبدیل میشوند، تصمیمها از درون تعامل زاده میشوند، و شبکه با هر مأموریت، هوشمندتر از قبل میگردد. از دید راهبردی، CoDrivingLLM آغازگر نسلی از فناوریهاست که به سازمانها قدرت «فهم جمعی» میدهد.
در آینده، زنجیرههای تأمین، خطوط تولید و مراکز لجستیکی دیگر به شکل جداگانه عمل نخواهند کرد آنها بهصورت یک موجودیت شناختی واحد، هماهنگ و پویا تصمیم خواهند گرفت. این همان تعریف واقعی صنعت ۵.۰ است — صنعتی که در آن داده، زبان و انسان در یک حلقهی هوشمند تعامل قرار میگیرند.
دعوت به اقدام
اکنون زمان آن رسیده است که مدیران صنعتی و مهندسان لجستیک، نگاه خود را از اتوماسیون صرف به سمت هوش تعاملی و یادگیرنده تغییر دهند. پیشنهاد میشود سازمانها اجرای آزمایشی CoDrivingLLM را در محیطهای کنترلشده آغاز کنند؛ با اتصال چند ربات از طریق یک مدل زبانی مرکزی و اجازه دادن به آنها برای گفتوگو و یادگیری از یکدیگر.
این آزمایشها میتوانند پایهای برای ورود تدریجی سازمان به نسل بعدی مدیریت عملیات باشند — مدیریتی که در آن تصمیمگیری نه توسط انسان یا ماشین، بلکه توسط شبکهای از هوشهای همکار انجام میشود. برای پژوهشگران و دانشگاهها، CoDrivingLLM بستری ایدهآل برای توسعهی مدلهای بومی و تطبیقی است. میتوان نسخههای سبکشدهی این چارچوب را برای محیطهای صنعتی کوچک یا صنایع خاص مانند لجستیک دارویی، انبارهای مواد غذایی و تولید قطعات الکترونیکی طراحی کرد.
آینده از آنِ سازمانهایی است که زودتر به هوش جمعی دیجیتال دست پیدا کنند.
پیام پایانی
CoDrivingLLM به ما یادآوری میکند که هوش واقعی، در تعامل و یادگیری جمعی معنا پیدا میکند. در جهانی که سیستمها بهسرعت خودمختار میشوند، بقای سازمانها وابسته به توان آنها در درک، گفتوگو و یادگیری مداوم است. رباتهایی که حرف میزنند، گوش میدهند و از یکدیگر میآموزند، نه رؤیای دور، بلکه واقعیت فردای صنعتاند — و CoDrivingLLM نقشهی راه رسیدن به این آینده است.
رفرنس مقاله
Shiyu Fang, Jiaqi Liu, Mingyu Ding, Yiming Cui, Chen Lv, Peng Hang, and Jian Sun,
“Towards Interactive and Learnable Cooperative Driving Automation: A Large Language Model-Driven Decision-Making Framework,”
IEEE Transactions on Intelligent Vehicles, vol. 10, no. 1, 2025, pp. 231–245.*
DOI: 10.1109/TIV.2025.3358712



{kind=link}
بدون نظر