

کارخانهای که دیگر منتظر تصمیم انسان نمیماند
وقتی رباتهای حملبار و یادگیری عمیق تبدیل به مغز تصمیمساز جریان تولید میشوند
در کارخانههای مدرن، سرعت تولید فقط به عملکرد ماشینآلات وابسته نیست؛ بلکه به چیزی بسیار پیچیدهتر بستگی دارد: هماهنگی بین کارها، ماشینها و رباتهای حملبار (AGV). هر خطای کوچک در زمانبندی، هر تأخیر در آماده شدن یک ماشین، یا هر انتظار بیهوده برای رسیدن AGV، میتواند کل روند تولید را کند کند. در دنیایی که رقابت جهانی ثانیهای شده، این تأخیرها نهتنها عملیات را مختل میکنند، بلکه سودآوری شرکت را هم تحت فشار قرار میدهند.
اما امروز یک تغییر بزرگ در حال رخ دادن است:
کارخانهها دیگر نمیخواهند «منتظر فکر کردن و تصمیم گرفتن انسان» بمانند. آنها به سیستمی نیاز دارند که در لحظه، دقیق، بدون خطا و هوشمندانه تصمیم بگیرد کدام کار باید ابتدا انجام شود، چه ماشین باید انتخاب شود و کدام AGV بار را منتقل کند. این همان نقطهای است که فناوریهای نسل جدید — ترکیب زمانبندی تولید با یادگیری عمیق — وارد صحنه میشوند.
در رویکرد نوینی که این مقاله معرفی کرده، کارخانه به یک موجود زنده تبدیل میشود؛ سیستمی که میفهمد، مقایسه میکند، تصمیم میگیرد و هر بار بهتر میشود. در این نگاه جدید، فرآیند زمانبندی Job Shop و مدیریت ناوگان AGV دیگر بهصورت جداگانه دیده نمیشوند، بلکه در قالب یک مغز واحد به نام DQN (Deep Q-Network) با هم ترکیب میشوند.
یعنی کارخانه دیگر برای زمانبندی منتظر انسان یا قوانین خشک نیست؛ بلکه یک هوش یادگیرنده دارد که از تجربهی کار روزمره یاد میگیرد بهترین ترتیب کارها و بهترین تخصیص AGV را انتخاب کند.
این رویکرد جدید توانسته مشکل تاریخی سیستمهای تولید را حل کند: چطور در شرایط پویا، نامنظم، چندوظیفهای و پر از عدمقطعیت، بهترین تصمیم را گرفت. DQN برخلاف روشهای کلاسیک، نه با قوانین ازپیشتعریفشده کار میکند، نه به انسان نیاز دارد تا پارامترها را تنظیم کند. این مدل مانند یک کارشناس باسابقه، با دیدن نتیجهی تصمیمهای قبلی، برای تصمیم بعدی حرفهایتر میشود. هر روز که کارخانه کار میکند، مغز دیجیتالی آن هوشمندتر میشود.
نتیجه چیست؟ جریان تولیدی که بهصورت طبیعی هموار میشود. رباتهای حملبار که همیشه دقیق در زمان لازم حاضر میشوند. ماشینهایی که کمتر بیکار میمانند.
و مهمتر از همه: حذف توقفهای غیرضروری و کاهش چشمگیر زمان تکمیل سفارشات. این دقیقاً همان جایی است که صنعت تولید از «اتوماسیون» به «خودهوشمندی» قدم میگذارد.
چالش اصلی کارخانهها و اینکه چرا روشهای قدیمی دیگر جواب نمیدهند
وقتی پیچیدگی، تغییرات لحظهای و فشار تولید از توان انسان و سیستمهای کلاسیک خارج میشود
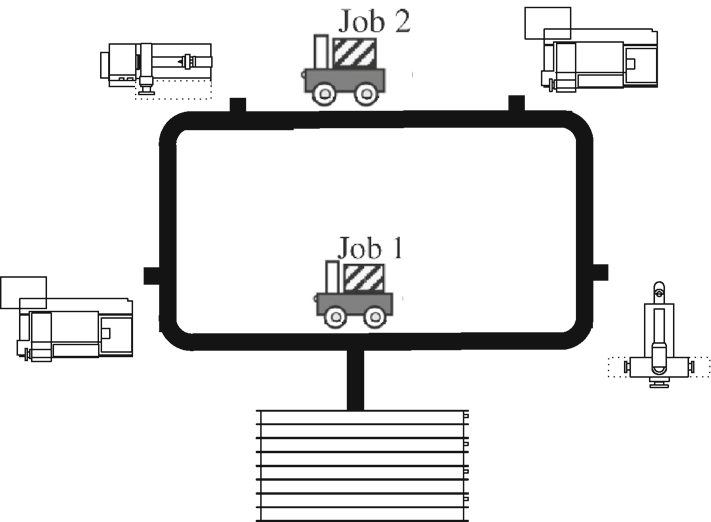
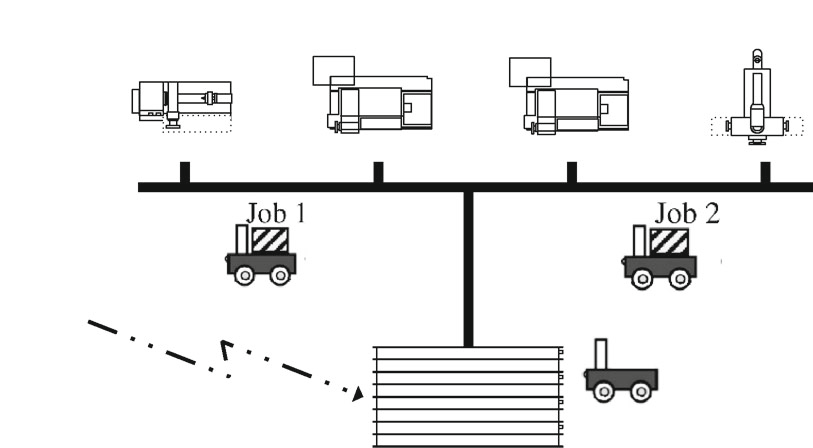
در ساختارهای تولیدی سنتی، فرض بر این بود که زمانبندی خطوط و مدیریت حرکت رباتهای حملبار (AGV) موضوعاتی جدا از هم هستند. یک سیستم برای اینکه تصمیم بگیرد کدام کار روی کدام ماشین انجام شود استفاده میشد، و سیستم دیگری برای اینکه کدام AGV بار را جابهجا کند. این تفکیک در ظاهر منطقی بود اما در عمل منجر به یک واقعیت تلخ میشد: هیچکس تصویر کامل جریان تولید را ندارد و تصمیمهای محلی باعث ایجاد تأخیرهای زنجیرهای میشوند. برای مثال:
ماشین آماده است اما AGV هنوز نرسیده.// AGV رسیده اما ماشین آزاد نیست.// کارها پشت هم صف شدهاند اما ترتیبشان بهینه نیست. یا بدتر از همه: ماشین بیکار مانده چون تصمیم اشتباه گرفته شده که کدام کار باید بعدی پردازش شود. اینها فقط چند نمونه از صدها مشکل واقعی یک کارگاه تولیدی هستند — مشکلاتی که روشهای قدیمی نمیتوانند حلشان کنند.
چرا سیستمهای کلاسیک Rule-Based و الگوریتمهای ثابت شکست میخورند؟
در بسیاری از کارخانهها هنوز از قوانین خشک مثل: “کار کوتاهتر را اول انجام بده”، “کار با موعد تحویل نزدیکتر اول انجام شود”، “AGV خالی نزدیکتر را انتخاب کن” استفاده میشود. این قوانین در شرایط ساده جواب میدهند، اما تولید واقعی هرگز ساده نیست.
در یک کارگاه واقعی: مدت پردازش کارها متفاوت است، مسیرهای AGV متفاوتاند، ترافیک ناگهانی رخ میدهد، کارها بهصورت تصادفی وارد سیستم میشوند (Arrival)، ماشینها گاهی دیر آماده میشوند و وضعیت محیط هر لحظه تغییر میکند.
در چنین فضایی، یک قانون ثابت نمیتواند بهترین تصمیم ممکن را بگیرد. این قوانین محلی تصمیم میگیرند، در حالیکه تأخیرها جهانی رخ میدهند.
مشکل بزرگتر: «هماهنگ نبودن زمانبندی تولید با زمانبندی AGV»
بزرگترین عامل هدررفت زمان در یک کارخانه مدرن این است که: زمانبندی تولید و زمانبندی AGV از هم جدا هستند. در نتیجه: AGV بهموقع سراغ کار نمیرود، ماشین خالی میماند، کار سردرگم میشود و تصمیمهای محلی باعث ترافیک و تأخیر زنجیرهای میشود.
کارخانههایی که چند AGV دارند بهخوبی میدانند که این مسئله میتواند روزانه چندین ساعت زمان مفید را از سیستم بدزدد. اینجاست که مقالهی جدید یک حرف بزرگ میزند:
«باید تصمیم دربارهی ترتیب کارها و تخصیص AGV بهصورت واحد و یکپارچه گرفته شود.»
نه جداگانه. نه با قوانین قدیمی. نه با حدس و گمان اپراتور.
چرا الگوریتمهای کلاسیک بهینهسازی (GA, SA, PSO, TS) هم کافی نیستند؟
این روشها با اینکه بهتر از قوانین دستیاند، اما یک مشکل اصلی دارند:
❌ برای شرایط ثابت خوبند، اما در محیط پویا و لحظهای، خفه میشوند. وقتی: کار جدید ناگهان وارد میشود، ماشین زودتر آماده میشود، AGV در مسیر گیر میکند، یا صفها ناگهان شلوغ میشوند،
الگوریتمهای GA و PSO باید از نو اجرا شوند…
که زمانبر است و در عمل باعث تأخیر بیشتر میشود.
یعنی این روشها نمیتوانند Real-Time تصمیم بگیرند.
راهحل واقعی: هوشی که هر ثانیه یاد میگیرد و خود را با شرایط وفق میدهد
ساختار تولید مدرن نیاز به سیستمی دارد که:
در لحظه وضعیت را ببیند،
از شرایط گذشته درس بگیرد,
رفتار آینده را پیشبینی کند،
و با هر تغییر کوچک، تصمیم تازه و بهینه بگیرد.
این دقیقاً همان چیزی است که روش نوین مقاله ارائه کرده:
یک مدل MDP + الگوریتم یادگیری عمیق DQN که تصمیمگیری تولید و AGV را یکپارچه میکند.
در روش مقاله، کارخانه دیگر برنامهی ثابت ندارد… بلکه یک مغز یادگیرنده دارد.
مغزی که هر بار کار را اشتباه زمانبندی کند، جریمه میشود. هر بار تأخیر کم کند، تشویق میشود. و هر روز باهوشتر میشود.
این همان نقطهای است که صنعت تولید از اتوماسیون مکانیکی وارد هوشمندی واقعی میشود.
نوآوری: یکپارچهسازی زمانبندی تولید و مدیریت AGV با تبدیل کارخانه به یک مدل تصمیمگیری هوشمند (MDP + DQN)
نوآوری بزرگ مقاله از جایی شروع میشود که نویسندگان متوجه یک حقیقت مهم شدهاند: تمام مشکلات تأخیر، صفهای طولانی جلوی ماشینها، بیکار ماندن AGV یا انتظار بیدلیل کارها، ریشه در این دارد که کارخانه تصمیمهایش را «جزیرهای» میگیرد، نه یکپارچه. یعنی یک سیستم تصمیم میگیرد کدام کار باید پردازش شود، یک سیستم دیگر تعیین میکند کدام AGV بار را جابهجا کند، و هیچکس نمیتواند تصویر کامل جریان مواد را ببیند. این مقاله با یک نگاه نو، کل این معادله پیچیده را به یک ساختار هوشمند واحد تبدیل کرده است؛ ساختاری که دقیقاً همانطوری فکر میکند که یک مدیر حرفهای کارخانه باید فکر کند، اما با سرعت، دقت و ثبات بسیار بیشتر.
در قلب این نوآوری، یک مفهوم قدرتمند وجود دارد: MDP (Markov Decision Process). نویسندگان مسئله زمانبندی تولید و حرکت AGV را نه بهعنوان دو مسئله جدا، بلکه بهعنوان «یک مسئله تصمیمگیری واحد» مدل کردهاند. در این مدل، کارخانه در هر لحظه یک «وضعیت» دارد و باید یک «اقدام» انجام دهد، و نتیجه هر اقدام بهصورت پاداش یا جریمه به سیستم بازگردانده میشود. همین ایدهی ساده، راه را برای استفاده از یادگیری عمیق باز میکند.
نوآوری مقاله این است که برای اولینبار یک مدل MDP کامل و بسیار دقیق برای یک Job Shop واقعی ساخته است؛ مدلی که همهچیز را داخل خود دارد: وضعیت ماشینها، آماده بودن عملیات بعدی، فاصله AGVها تا کار، مسیرهای آزاد یا شلوغ، صفها، زمانهای پردازش و حتی ورود تصادفی کارهای جدید. این یعنی سیستم یک تصویر «واقعی» از جریان تولید دارد، نه یک شبیهسازی ساده.
اما بخش مهمتر، اقدامها هستند. برخلاف روشهای قدیمی که فقط یک تصمیم اتخاذ میکردند (مثلاً انتخاب کار بعدی)، این مقاله یک اقدام ترکیبی تعریف میکند:
اقدام = انتخاب کار مناسب + انتخاب AGV مناسب برای حمل آن
این ترکیب، چیزی است که تقریباً هیچ الگوریتم سنتی قادر به انجامش نبود، چون پیچیدگی آن انفجاری میشود. اما DQN دقیقاً برای چنین کارهایی ساخته شده است.
در این مقاله، یک DQN حرفهای با ساختاری دقیق طراحی شده که جایگزین «فکر کردن انسان» میشود. این DQN بر اساس یک فضای حالت زیربنایی ساخته شده که ۲۲ ویژگی مختلف را در هر لحظه بررسی میکند. این ویژگیها وضعیت کامل جریان تولید را نشان میدهند: کدام کار آماده است؟ کدام ماشین در حال کار است؟ AGVها کجا هستند؟ مسیرها چقدر شلوغاند؟ کدام عملیات در صف است؟ و دهها شاخص دیگر. با داشتن چنین تصویری، DQN دقیقاً میفهمد چه شرایطی بر کارخانه حاکم است.
سپس شبکه باید از بین ۶۰ اقدام ممکن بهترین را انتخاب کند. این اقدام میتواند ترکیبی از «کدام کار» و «کدام AGV» باشد. هر اقدام یک نتیجه دارد؛ اگر اقدام بد باشد، ماشینها منتظر میمانند یا AGV درگیر ترافیک میشود. اگر اقدام خوب باشد، زمان تکمیل کاهش مییابد. این پاداشها و جریمهها باعث میشوند شبکه هر روز بهتر شود.
نوآوری اصلی اینجاست: DQN کمکم یاد میگیرد که «چگونه» تصمیم بگیرد، نه اینکه صرفاً یک الگوی ثابت را دنبال کند. یعنی اگر کارگاه ناگهان شلوغتر شود، اگر ورود کارها تصادفی شود، اگر AGV دچار تأخیر شود، شبکه خودش رفتار جدیدی میسازد. این همان ویژگی است که الگوریتمهای Rule-Based و حتی الگوریتمهای بهینهسازی کلاسیک (GA, PSO, TS) نمیتوانند به آن برسند، چون آنها در برابر تغییرات لحظهای ناتواناند.
در نهایت، مقاله نشان میدهد که با استفاده از این مدل MDP و DQN، کارخانه به یک سیستم خودتصمیمگیر و خودآموز تبدیل میشود. تصمیمها دیگر بر پایهی حدس یا قوانین ثابت نیستند؛ تصمیمها بر پایه «آموختههای واقعی» و «تجربه مستقیم» گرفته میشوند. این دقیقاً همان نقطهای است که تولید به دنیای هوشمحور قدم میگذارد — جایی که کارخانه همانند یک موجود زنده رفتار میکند: لحظهبهلحظه تحلیل میکند، اشتباه را اصلاح میکند، و روزبهروز باهوشتر میشود.
چگونه DQN این تصمیمگیری پیچیده را یاد میگیرد؟
از تجربه تا هوشمندی: مغزی که هر روز بهتر از دیروز میشود
جذابیت اصلی DQN این است که برخلاف الگوریتمهای کلاسیک، نیاز ندارد کسی به آن بگوید «چه کاری بهتر است». هیچ قانون از پیش تعیینشدهای ندارد، هیچ جدول ثابت یا فرمول پیچیدهای برایش تعریف نمیشود. تنها چیزی که DQN دارد، تجربه است؛ تجربهای که از دل کار واقعی کارخانه بیرون میآید. این الگوریتم به زبان ساده اینگونه کار میکند: امتحان میکند، نتیجه میگیرد، اشتباه میکند، جریمه میشود، درست رفتار میکند، پاداش میگیرد — و در نهایت از مجموع این چرخهها تبدیل میشود به یک تصمیمساز حرفهای.
در این مقاله، نویسندگان یک معماری یادگیری عمیق طراحی کردهاند که جریان کامل تولید را بررسی میکند. مدل در هر لحظه تصویر کاملی از وضعیت کارخانه دارد: کدام کار آماده است؟ کدام ماشین در حال کار است؟ کدام AGV نزدیکتر است؟ صفها چقدر طولانیاند؟ کدام مرحله بحرانیتر است؟ فاصلهها و اولویتها چگونه تغییر کردهاند؟ این دادهها بهصورت یک «بردار حالت» وارد DQN میشود — درست مانند اینکه یک مدیر ماهر به سالن تولید نگاه کند و در یک نگاه بفهمد چه اتفاقی باید بیفتد.
حالا نوبت تصمیم گرفتن است. DQN از میان حدود ۶۰ اقدام ممکن باید یکی را انتخاب کند؛ اقدامی که هم کار بعدی را مشخص میکند و هم تعیین میکند کدام AGV باید برای حمل آن وارد عمل شود. در آغاز، شبکه هنوز «بیتجربه» است و بسیاری از تصمیمها اشتباه خواهند بود. اما همین اشتباهات، سوخت یادگیری مدل هستند. هر بار که یک تصمیم بد گرفته میشود: ماشین بیکار میماند، AGV تأخیر میکند، یا صفها طولانی میشوند و سیستم به شبکه «جریمه» میدهد.
اما وقتی شبکه تصمیم درستی بگیرد — مثلاً کاری را انتخاب کند که به کاهش زمان کل کمک کند یا AGV مناسبی را اختصاص دهد — سیستم به او «پاداش» میدهد. کمکم شبکه از این چرخه یاد میگیرد که چه تصمیمهایی ارزشمندند و چه تصمیمهایی مخرب.
اما یک نکته مهم وجود دارد: اگر شبکه فقط از تصمیمهای گذشته تقلید کند، هیچوقت راهحل جدید پیدا نمیکند. برای همین در DQN یک مفهوم حیاتی وجود دارد: Exploration (کاوشگری). یعنی حتی وقتی مدل فکر میکند بهترین تصمیم را میداند، باز هم گاهی تصمیم جدیدی امتحان میکند تا شاید الگوی بهتری پیدا کند. این دقیقاً همان چیزی است که انسانهای باتجربه هم انجام میدهند: گاهی مسیرهای تازه را امتحان میکنند تا ببینند آیا راه بهتری وجود دارد یا نه.
از طرفی، DQN یک حافظه دارد — چیزی شبیه دفترچه تجربه — که در آن تمام تصمیمهای قبلی و نتایج آنها ذخیره میشود. این حافظه کمک میکند شبکه فقط از تجربههای لحظهای یاد نگیرد، بلکه از تجربیات گذشته هم دوباره درس بگیرد. این باعث میشود یادگیری پایدارتر و عاقلانهتر باشد.
در نهایت، شبکه کمکم تبدیل میشود به یک مغز کامل عملیاتی برای کارخانه:
مغزی که میداند کدام کار را در چه زمانی اجرا کند، چگونه AGV را هماهنگ کند، چگونه صفها را کوتاه نگه دارد، چگونه از بیکار شدن ماشینها جلوگیری کند و چگونه جریان تولید را مانند یک رودخانه روان و بدون گرهکردگی نگه دارد.
در روش مقاله، این مغز دیجیتال توانسته در شرایط واقعی — با ورود ناگهانی کارها، تغییرات زمان پردازش، تأخیر AGV و محدودیت مسیر — بهتر از تمام روشهای قدیمی عمل کند. نهتنها بهتر، بلکه پایدارتر، منظمتر و هوشمندتر از هر روش بهینهسازی کلاسیک.
این همان نقطهای است که کارخانه از «برنامهریزی ثابت» وارد دنیای تصمیمگیری یادگیرنده میشود. و این، دقیقاً همان چیزی است که آینده تولید و لجستیک صنعتی بر پایه آن ساخته خواهد شد.
نتایج عملی و تأثیر واقعی روش DQN در جریان تولید
از صفهای کوتاهتر تا کاهش تأخیر AGV؛ کارخانهای که واقعاً سریعتر، منظمتر و پیشبینتر کار میکند
وقتی یک مدل هوش مصنوعی مثل DQN وارد کارخانه میشود، نتیجه فقط یک نمودار قشنگ یا یک عدد بهبود نیست. نتیجه یک تغییر رفتاری بنیادین در جریان تولید است؛ تغییری که از سطح ماشینها شروع میشود و تا لایهی مدیریت کل عملیات ادامه پیدا میکند. این مقاله با شبیهسازیهای دقیق و سناریوهای واقعی نشان داده که وقتی زمانبندی کارها و مدیریت AGV در قالب یک مغز واحد تصمیمگیری قرار میگیرند، کارخانه از حالت واکنشی به حالت پیشکنشی تبدیل میشود. یعنی به جای اینکه اول مشکل رخ دهد و بعد حل شود، سیستم از قبل مشکل را تشخیص داده و آن را خنثی میکند.
یکی از نتایج کلیدی این روش، کاهش چشمگیر زمان انتظار AGVها است. در روشهای قدیمی، AGVها اغلب یا مجبور بودند مدت زیادی منتظر آزاد شدن ماشینها بمانند، یا زمانی که ماشین آماده بود، خودشان درگیر مسیرهای اشتباه یا ترافیک داخلی میشدند. اما با تصمیمگیری یکپارچه DQN، رباتها دقیقاً در زمان درست در جای درست قرار میگیرند. این هماهنگی باعث شد انتظار AGVها بهصورت محسوس کاهش پیدا کند و چرخهی حملونقل مواد روانتر و منظمتر شود.
از طرف دیگر، زمان بیکاری ماشینها نیز به میزان زیادی کاهش یافت. در سیستمهای قدیمی، دلیل اصلی بیکاری ماشینها ناشی از سه عامل بود: دیر رسیدن AGV، انتخاب اشتباه کار بعدی، یا هدررفت زمان بین عملیاتها. اما DQN با نگاه از بالا و تحلیل لحظهای وضعیت، بهگونهای کارها را زمانبندی میکند که ماشینها تا حد ممکن خالی نمانند. نتیجهی این رفتار، افزایش مستقیم بهرهوری خط تولید و کاهش زمان چرخهی کل کارها (Makespan) است.
یکی از جذابترین بخشهای نتایج این است که DQN توانست در محیطهای ناپایدار و غیرقابلپیشبینی، بهتر از همهی روشهای کلاسیک عمل کند.
وقتی ترتیب ورود کارها تصادفی میشود…
وقتی زمان پردازش واقعی تغییر میکند…
وقتی AGVها در مسیر تأخیر میخورند…
وقتی صفها ناگهان شلوغ میشود…
روشهای قدیمی قفل میشوند، اما DQN رفتار خود را اصلاح میکند و تصمیمهای جدیدی میسازد.
مقاله نشان میدهد که در سناریوهای مختلف، این سیستم توانسته:
زمان تکمیل کل کارها (Makespan) را بهشدت کاهش دهد
زمان انتظار ماشینها را کم کند
ترافیک داخلی AGV را کنترل کند
تصمیمهای اشتباه را به حداقل برساند
و حتی در برابر تغییرات شدید، پایدار بماند
در شبیهسازیهای واقعی، DQN در بسیاری از سناریوها بهتر از الگوریتمهای ژنتیک (GA)، الگوریتم شبیهسازی تبرید (SA)، روشهای Rule-Based و حتی مدلهای بهینهسازی ترکیبی عمل کرده است — اما نکتهی مهمتر این است که این بهبود فقط در بهترین حالت نبوده، بلکه در بدترین حالت نیز رفتار DQN پایدارتر و قابلاعتمادتر بوده است.
این یعنی کارخانهای که از این مدل استفاده کند، نهتنها سریعتر کار میکند، بلکه رفتار آن قابل پیشبینی، منظم و مطمئن است — حتی وقتی شرایط محیطی نامنظم، پرنوسان و تصادفی باشد.
این سطح از قابلیت، دقیقاً همان چیزی است که مدیران صنعتی بهدنبالش هستند: سیستمی که حتی در بدترین شرایط، بهترین عملکرد را حفظ کند.
در نهایت، دستاورد مقاله نشان داد که ترکیب تولید + AGV + DQN یک تغییر بنیادین ایجاد میکند:
کارخانه از حالتی که باید بر اساس برنامهی ثابت کار کند، وارد حالتی میشود که بر اساس هوش زنده کار میکند.
جریانی که هر لحظه یاد میگیرد، تصمیم میگیرد و با هر تجربه بهتر عمل میکند — همان چیزی که آیندهی صنعت بر دوش آن استوار خواهد بود.
کاربردهای عملی و سناریوهای واقعی استفاده از مدل DQN در کارگاهها و کارخانههای مدرن
از خطوط مونتاژ خودرو تا صنایع الکترونیک و FMCG؛ جایی که هوش تصمیمگیر، تفاوت میان آشفتگی و بهرهوری است
وقتی مدل DQN وارد یک محیط تولید واقعی میشود، اثر آن در یک نقطه محدود نمیماند؛ بلکه در تمام زنجیرهی تولید دیده میشود. مهمترین ویژگی این روش، قابلیت سازگاری با هر صنعتی است که در آن ماشینها، کارها و رباتهای حملبار حضور دارند — یعنی تقریباً در همهی صنایع متوسط تا بزرگ. این بخش، سناریوهایی واقعی و کاربردی را نشان میدهد تا مشخص شود این مدل فقط یک ایدهی دانشگاهی نیست؛ یک ابزار عملیاتی است که بهطور مستقیم روی سرعت، کیفیت و هزینه تأثیر میگذارد.
سناریو ۱: صنعت خودرو — هماهنگی بیوقفه بین ماشینها و AGV
در خطوط مونتاژ خودرو، هر لحظه چندین کار پیچیده باید همزمان انجام شود. آماده بودن یک ماشین کافی نیست؛ باید AGV درست هم در زمان صحیح در محل حاضر باشد تا بخش بعدی مونتاژ انجام شود.
در روشهای کلاسیک، یک تأخیر کوچک در یکی از AGVها میتواند کل خط را ۲ تا ۵ دقیقه عقب بیندازد — که در مقیاس روزانه زیان بسیار بزرگی است.
اما مدل DQN دقیقاً این نقطه ضعف را حذف میکند.
شبکه یاد میگیرد ماشینهایی که سرعت بالاتر دارند یا فاصلهی کمتری با AGVهای آزاد دارند، در اولویت قرار گیرند. به این ترتیب، مونتاژ خودرو بدون مکث، بدون ازدحام و بدون انتظار انجام میشود.
نتیجهی عملی: افزایش چشمگیر بهرهوری خط و کاهش تأخیرهای زنجیرهای.
سناریو ۲: صنایع الکترونیک — کارگاههای پر از وظایف ریز و پراکنده
در کارخانههای الکترونیک، هر دستگاه باید از چندین ایستگاه کاری عبور کند. کارها کوچک، زیاد و پراکندهاند. AGVهای کوچک یا AMRهای سبک معمولاً وظیفه حمل این قطعات را دارند.
در این محیطها، پیچیدگی واقعی از جایی شروع میشود که صدها کار کوچک بهصورت تصادفی وارد خط تولید میشوند.
مدل DQN با تحلیل لحظهای وضعیت میتواند تعیین کند کدام کار باید جلو بیفتد، کدام کار میتواند منتظر بماند، و کدام AGV مناسبترین گزینه برای حمل یک قطعه است.
بهجای اینکه اپراتور با حدس و تجربه تصمیم بگیرد، مغز هوشمند کارخانه بهترین ترکیب را میسازد.
سناریو ۳: صنایع غذایی و FMCG — محیطهای ناپایدار با فشار زمانی بالا
در صنایع غذایی و بستهبندی، هر ثانیه ارزش دارد. توقف یک ماشین بستهبندی یا تأخیر در ورود مواد اولیه میتواند هزاران بسته را عقب بیندازد.
DQN در چنین محیطهایی عالی عمل میکند، چون یاد میگیرد چه کارهایی در لحظات بحرانی باید اولویت داشته باشند.
مثلاً اگر یک ماشین پرسرعت روبهاتمام باشد، سیستم یاد میگیرد که AGV نزدیکتر را در اولویت قرار دهد تا مواد اولیه سریعاً برسد و خط از حرکت نایستد.
این سطح از هوشمندی باعث میشود خطوط تولید FMCG تقریبا بدون مکث کار کنند.
سناریو ۴: کارگاههای سفارشی و تولید چندنوعه (High-Mix Low-Volume)
در جاهایی که تنوع کار بسیار بالاست و حجم هر کار پایین، برنامهریزی سنتی تقریباً غیرممکن میشود.
ورود کارها نامنظم است، زمان پردازشها ثابت نیست و مسیر AGVها پر از پیچوخم است.
اینجا DQN بهترین عملکرد را دارد، چون اصلاً به «ثابت بودن» کاری ندارد؛
بر اساس وضعیت واقعی و تازه، تصمیم میگیرد.
این یعنی کارگاههای پروژهای، سفارشیساز و ساختبهسفارش بهطور طبیعی با این مدل سازگار هستند.
سناریو ۵: کارخانههایی با چند AGV، مسیرهای تنگ و ترافیک داخلی
یکی از بزرگترین مشکلات کارخانههای چندAGV، ترافیک داخلی است.
وقتی چند AGV در یک راهرو باریک حرکت میکنند، کوچکترین تصمیم اشتباه باعث گره حرکتی میشود.
DQN یاد میگیرد که تصمیمهایی اتخاذ کند که عملاً از شکلگیری ترافیک جلوگیری کند.
مثلاً اگر دو AGV در حال نزدیک شدن به یک نقطه هستند، مدل یاد میگیرد اول آن AGV را بفرستد که سرعت بیشتری دارد یا احتمال توقف کمتری دارد.
این رفتار، سیستم را به ساختاری روان و بدون برخورد تبدیل میکند.
سناریو ۶: محیطهایی که ورود کارها تصادفی و غیرقابل پیشبینی است
در بسیاری از صنایع، کارها ناگهان وارد سیستم میشوند — بدون الگوی زمانبندی ثابت.
این شرایط دقیقاً همانجایی است که روشهای کلاسیک از کار میافتند چون نیاز به برنامهریزی از ابتدا دارند.
اما DQN برعکس: هر وقت کار جدید وارد میشود، تصمیم جدید میسازد. نه از اول، نه با تأخیر — همان لحظه.
این ویژگی باعث میشود کارخانههایی که کارهای ناگهانی یا سفارشی دارند، عملکردی بینقص پیدا کنند.
در مجموع، این سناریوها نشان میدهند که مدل DQN نهتنها در تئوری، بلکه در دنیای واقعی میتواند کارخانهها را از حالت سنتی به حالت هوشمند تبدیل کند. این الگوریتم برای هر صنعتی که در آن کار, ماشین و ربات حملبار وجود دارد، میتواند مزیت عملیاتی و اقتصادی ایجاد کند.
مزیت رقابتی و ارزش استراتژیک استفاده از مدل DQN در کارخانههای مدرن
تصمیمگیری هوشمند؛ تفاوت میان کارخانهای که فقط «کار میکند» و کارخانهای که «بر بازار مسلط میشود»
در دنیای امروز، دیگر کافی نیست یک کارخانه فقط ماشینآلات خوب داشته باشد یا از AGV برای حمل مواد استفاده کند. رقابت جهانی به سطحی رسیده که تنها کارخانههایی موفق هستند که بتوانند بهترین تصمیم را، در بهترین زمان و بدون تأخیر بگیرند. این همان نقطهای است که مدل DQN وارد بازی میشود و کارخانه را از سطح معمولی به سطح فوقهوشمند ارتقا میدهد.
مزیت اول: کارخانهای که نیاز به مهندسی مداوم ندارد
در روشهای قدیمی، هر بار که وضعیت کارخانه تغییر میکرد — ورود کار جدید، اضافه شدن یک AGV، یا تغییر چیدمان — مهندسها مجبور بودند پارامترها را تنظیم کنند، قوانین جدید تعریف کنند یا کل برنامهریزی را از اول بنویسند. اما DQN برخلاف این روشها، خودش یاد میگیرد چهکار کند. نیازی به بازتنظیم، برنامهریزی دوباره یا تعریف یک قانون جدید نیست. این یعنی کارخانه تبدیل به یک سیستم خودتنظیم میشود؛ سیستمی که حتی با تغییرات ناگهانی، بدون دخالت مهندس هم تصمیم درست میگیرد.
مزیت دوم: کاهش هزینهها از دو سمت — انرژی و زمان
DQN نهتنها سرعت عملیات را افزایش میدهد، بلکه هزینههای پنهان کارخانه را هم بهشدت کاهش میدهد. هر دقیقهای که یک ماشین بیکار بماند یا AGV منتظر بماند، هزینهی مستقیم دارد. هر توقف در جریان کار، در واقع پول سوخته است. با DQN این توقفها تقریباً حذف میشوند، چون سیستم دقیقاً میفهمد بهترین ترکیب کار + AGV چیست. از طرف دیگر، AGVها مسیرهای بهینهتری میروند، کمتر مصرف میکنند و کمتر مستهلک میشوند. یعنی هزینهی انرژی، سوخت، تعمیر و نگهداری هم پایین میآید.
مزیت سوم: سازگاری با آینده — بدون نیاز به زیرساخت پیچیده
مزیت بزرگ DQN این است که روی زیرساخت موجود هم قابل اجراست. نیازی به تغییر کامل سیستم مدیریت انبار یا ساختار تولید نیست. DQN روی دادهای که همین امروز تولید میشود آموزش میبیند و با ساختار موجود کارخانه هماهنگ میشود. این ویژگی باعث شده این فناوری برای:
کارخانههای کوچک و متوسط
کارخانههایی که نمیخواهند زیرساخت را تغییر دهند
و شرکتهایی که به دنبال ارتقای تدریجی هستند
کاملاً مناسب باشد.
مزیت چهارم: کاهش ریسک و افزایش اطمینانپذیری
در روشهای کلاسیک، همیشه ترس از تصمیم اشتباه وجود دارد:
اگر کار اشتباهی انتخاب شود…
اگر AGV اشتباهی اختصاص داده شود…
اگر صف ناگهان شلوغ شود…
این خطاها نهفقط سیستم را کند میکند، بلکه خطر برخورد، توقف خط و حتی آسیب به تجهیزات را دارد. اما DQN با یادگیری از تجربههای گذشته، بهسرعت اشتباهات خود را اصلاح میکند. یعنی سیستم هر روز دقیقتر و قابلاعتمادتر میشود — دقیقاً مانند یک اپراتور باتجربه که هر روز بهتر از روز قبل تصمیم میگیرد.
مزیت پنجم: بهبود برند و افزایش اعتبار صنعتی
شرکتهایی که از چنین فناوریهایی استفاده میکنند، در نگاه مشتریان و شرکای تجاری بهعنوان رهبران واقعی صنعت شناخته میشوند. کارخانهای که خودهوشمند، بدون توقف، با جریان روان و بدون خطا کار میکند، برتری آشکار نسبت به رقبا دارد. این برتری نهتنها به عملکرد، بلکه به تصویر برند نیز کمک میکند:
کارخانهای مدرن
مجهز به تصمیمگیری هوشمند
قابلاعتماد
و آیندهنگر
در بسیاری از بازارها، همین تصویر باعث جذب قراردادهای بزرگتر و همکاری با برندهای بینالمللی میشود.
مزیت ششم: تصمیمگیری زنده — مهمترین سلاح رقابت آینده
دورهی «برنامهریزی استاتیک» تمام شده است. آینده متعلق به کارخانههایی است که میتوانند بر اساس شرایط لحظهای تصمیم بگیرند. DQN این توانایی : تصمیمگیری زنده، یادگیری زنده، هماهنگی زنده و اصلاح زنده را فراهم میکند. این یعنی کارخانه همیشه در بهترین حالت کار میکند؛ بدون وقفه، بدون دخالت انسان، با دقتی که هیچ روش دیگری نمیتواند ارائه دهد.
در مجموع، DQN نهفقط یک الگوریتم یا یک ابزار تکنولوژیک است؛ بلکه مستقیمترین مسیر برای ساخت یک کارخانه هوشمند، پایدار، سریع و اقتصادی است. کارخانهای که با این روش تجهیز شود، در برابر رقبایی که هنوز از روشهای قدیمی استفاده میکنند، یک مزیت رقابتی بلندمدت خواهد داشت — مزیتی که هر روز بیشتر میشود، چون سیستم هر روز یاد میگیرد و تکامل پیدا میکند.
نتیجهگیری: وقتی کارخانه یاد میگیرد فکر کند؛ زمانیکه سرعت، نظم و هوش تبدیل به استاندارد جدید تولید میشوند
تحولی که مدل DQN در جریان تولید ایجاد میکند، چیزی فراتر از یک بهبود عددی یا یک ترفند الگوریتمی است. این روش یک نقطه عطف در دنیای تولید و لجستیک محسوب میشود؛ نقطهای که در آن کارخانه به موجودی هوشمند تبدیل میشود—موجودی که میتواند شرایط محیط را بشناسد، رفتار گذشته را تحلیل کند، نتیجه تصمیمها را بسنجد و برای آینده بهترین واکنش را انتخاب کند. این همان جهشی است که صنعت را از اتوماسیون سنتی به اتوماسیون خودفهم، خودآموز و خودتصمیم میرساند.
در گذشته، برنامهریزی تولید متکی به جدولها، قوانین ثابت و تجربهی انسانی بود. اما پیچیدگی تولید مدرن، تغییرات ناگهانی و وابستگی شدید میان ماشینها و AGVها دیگر اجازه نمیدهد جهان واقعی را با ابزارهای قدیمی کنترل کنیم. روش مقاله نشان میدهد که وقتی زمانبندی تولید و مدیریت AGV در یک مغز واحد ادغام میشوند، کارخانه به سطحی از بهرهوری میرسد که پیشتر فقط در مدلهای ایدهآل و تئوری ممکن بود. کاهش تأخیرها، حذف ترافیکهای داخلی، کوتاه شدن صفها، افزایش ظرفیت کاری و پایداری تصمیمها تنها بخشی از ارزش این مدل است.
اما مهمتر از همه این است که DQN هر روز هوشمندتر میشود. برخلاف الگوریتمهای سنتی که با یکبار طراحی ثابت میمانند، این مدل با هر تجربهای تغییر میکند و بهتر میشود. این یعنی کارخانهای که امروز با این فناوری شروع کند، فردا دقیقتر، پسفردا سریعتر و سال بعد چند برابر کارآمدتر خواهد شد. چنین روندی یک مزیت رقابتی ساده نیست؛ یک شتابدهندهی هوشمند است که کارخانه را به یک برند برتر در صنعت تبدیل میکند.
دعوت به اقدام: زمان ساختن کارخانه هوشمند همین حالاست
اگر یک کارخانه بخواهد در بازار جهانی امروز بقا داشته باشد، دیگر نمیتواند تنها به سرعت ماشینها یا تعداد کارکنان تکیه کند. ارزش واقعی در هوشمندی تصمیمها است—اینکه کارخانه بتواند در لحظه بهترین انتخاب را انجام دهد. به همین دلیل، مدلهایی مثل DQN نهفقط یک فناوری جذاب، بلکه یک نیاز استراتژیک هستند. گامهای پیشنهادی برای شروع:
تحلیل جریان فعلی تولید
بررسی وضعیت استفاده از AGVها و نقاط گلوگاهی
مدلسازی MDP بر اساس دادههای واقعی
اجرای نسخهی آزمایشی DQN
و سپس گسترش سیستم در مقیاس کامل
این مسیر کمریسک، قابلکنترل و بسیار پربازده است. بهمحض شروع پیادهسازی، بهبود عملکرد در همان هفتههای اول قابل مشاهده خواهد بود.
شرکتهایی که اکنون این مسیر را آغاز کنند، در سالهای آینده نهفقط رقیب، بلکه مرجع و رهبر بازار خواهند بود—زیرا کارخانهای که هوشمند تصمیم میگیرد، همیشه چند قدم جلوتر از کارخانهای است که هنوز به روشهای سنتی تکیه دارد.
رفرنس:
“Integration of Job Shop Scheduling and AGV Dispatching Using Reinforcement Learning-Based DQN Framework” (2024)


{kind=link}
بدون نظر