

زمانبندی بینرباتی و تخصیص تطبیقی منابع در بستر MEC برای کارخانههای هوشمند
در چند سال اخیر، رباتهای حملبار خودکار (AGV) از ابزارهای سادهی جابهجایی مواد به اجزای حیاتی زیرساخت کارخانههای هوشمند تبدیل شدهاند. در گذشته، نقش آنها محدود به حمل پالت در مسیرهای از پیشتعیینشده بود، اما با رشد مفهوم Industry 4.0 و ورود نسل جدید فناوریهای ارتباطی و محاسباتی، این رباتها به عاملانی مستقل و تصمیمساز در شبکههای لجستیکی تبدیل شدهاند. اکنون هر AGV نهتنها یک وسیلهی مکانیکی، بلکه یک گره هوشمند در شبکهای از عاملهای دیجیتال است که باید همزمان تصمیم بگیرد، ارتباط برقرار کند و منابع خود را مدیریت نماید.
در کارخانههای مدرن، تعداد زیادی از این رباتها بهصورت همزمان در حال فعالیت هستند — هرکدام با مأموریت، مسیر، سرعت و اولویت متفاوت. هماهنگی میان آنها به یکی از پیچیدهترین مسائل لجستیکی جهان تبدیل شده است. اگر حتی یکی از رباتها در تصمیمگیری اشتباه کند، یا مسیر خود را با تأخیر تنظیم نماید، زنجیرهی کامل عملیات ممکن است متوقف شود. در گذشته، این هماهنگی از طریق کنترل مرکزی انجام میشد، اما امروزه با افزایش تعداد رباتها، مدل متمرکز دیگر پاسخگو نیست. شبکههای لجستیکی آینده نیازمند معماریهای توزیعشدهاند که هر ربات بتواند بخشی از تصمیم را خودش بگیرد و در عین حال، هماهنگی کلی را حفظ کند.
اینجاست که مفهوم هوش چندعاملی (Multi-Agent Intelligence) و محاسبات لبهای چنددسترسی (Multi-Access Edge Computing – MEC) به میان میآید. این دو فناوری بهطور مشترک ستون فقرات نسل آیندهی لجستیک خودکار را میسازند. MEC، ظرفیت محاسباتی را از مرکز دادههای ابری به نزدیکترین گرهها — یعنی خود رباتها یا ایستگاههای نزدیک به آنها — منتقل میکند. به این ترتیب، تصمیمگیری از سطح ابری به سطح محیط فیزیکی میرسد؛ جایی که داده تولید میشود و باید فوراً تحلیل گردد. در نتیجه، هر AGV میتواند با تأخیر بسیار پایین و قدرت پردازشی بالا تصمیم بگیرد، مسیر خود را اصلاح کند و حتی با سایر رباتها وارد مذاکره شود.
در کنار آن، هوش چندعاملی به AGVها توانایی تفکر جمعی میدهد. بهجای اینکه هر ربات تنها بر اساس دادههای خودش تصمیم بگیرد، مجموعهای از رباتها میتوانند در قالب یک شبکهی همکاری، وضعیت محیط، اولویت مأموریتها و ترافیک مسیر را با هم به اشتراک بگذارند و تصمیمی بگیرند که برای کل سیستم بهینه است. این همکاری در مقالهی حاضر از طریق یک پروتکل چندعاملی جدید (Collaborative Multi-Agent Protocol) در دو سطح پیادهسازی شده است:
در سطح بینرباتی (Inter-AGV Scheduling) برای هماهنگی مأموریتها و مسیرها؛
و در سطح درونرباتی (Intra-AGV Resource Allocation) برای مدیریت بهینهی منابع محاسباتی، انرژی و ارتباطی در هر ربات.
از دید صنعتی، اهمیت این معماری دو سطحی در آن است که کارخانه را از یک ساختار واکنشی به یک سیستم پیشبین و تطبیقی تبدیل میکند. رباتها میتوانند بر اساس تحلیلهای لحظهای، از ازدحام در مسیرها جلوگیری کنند، زمان مأموریتها را کاهش دهند، و حتی مصرف انرژی را در سطح شبکه متعادل نگه دارند. در واقع، سیستم از حالت “هماهنگی مرکزی” به “خودسازماندهی جمعی” تغییر میکند — مفهومی که پایهی اصلی صنعت ۵.۰ خواهد بود.
بهطور خلاصه، این مقاله نشان میدهد که چگونه ترکیب دو فناوری — MEC برای پردازش سریع در لبه و هوش چندعاملی برای همکاری شناختی میان رباتها — میتواند مسیر جدیدی در طراحی سیستمهای حملونقل هوشمند و عملیات تولیدی ایجاد کند.
در این مدل، هر ربات دیگر فقط مجری نیست، بلکه بخشی از سیستم تصمیمساز است؛ سیستم زندهای که در آن تصمیمها از دل دادهها و در لحظه ساخته میشوند.
چالشهای فعلی در هماهنگی میان رباتهای حملبار و مدیریت منابع
با گسترش کارخانههای هوشمند، تعداد رباتهای حملبار خودکار (AGV) در خطوط تولید بهسرعت در حال افزایش است. اما همزمان با این رشد، سطح پیچیدگی سیستمهای لجستیکی نیز چند برابر شده است. دیگر صحبت از چند ربات نیست که در مسیرهای از پیشتعیینشده حرکت کنند؛ بلکه صدها AGV باید بهصورت همزمان در محیطی پویا، چندوظیفهای و اشتراکی کار کنند. در چنین شرایطی، چالش اصلی نه در سختافزار رباتها، بلکه در هماهنگی و تصمیمگیری بلادرنگ نهفته است.
یکی از نخستین چالشها، تعارض مأموریتها و ازدحام حرکتی است. هر AGV در لحظه باید تصمیم بگیرد کدام مسیر را انتخاب کند، از کدام منطقه عبور کند و چه زمانی توقف نماید. اگر این تصمیمها بدون هماهنگی میان رباتها گرفته شوند، حتی کوچکترین خطا میتواند به قفلشدگی مسیر، توقف زنجیرهای و از بین رفتن تعادل کل سیستم منجر شود. در ساختارهای سنتی که کنترل مرکزی تصمیمها را تعیین میکرد، این خطر کمتر بود، اما اکنون که سیستمها به سمت معماری توزیعشده حرکت کردهاند، هر ربات باید با اطلاعات محدود و محلی تصمیمی اتخاذ کند که با تصمیم سایر رباتها همخوان باشد — و این مسئله از نظر محاسباتی بسیار پیچیده است.
چالش دوم، محدودیت منابع محاسباتی در خود رباتها است. برخلاف مراکز داده یا سرورهای ابری، هر ربات تنها از یک پردازندهی لبهای (Edge Processor) و باتری محدود بهره میبرد. در نتیجه، ربات نمیتواند بهصورت مستقل حجم زیادی از دادههای محیطی، مسیرها و مأموریتها را تحلیل کند. اگر تمام تصمیمها درون ربات گرفته شوند، سرعت پردازش کاهش مییابد؛ و اگر تمام آنها به ابر ارسال شوند، تأخیر ارتباطی باعث از بین رفتن هماهنگی لحظهای میشود. این همان تعارض میان محاسبات محلی و ابری است که بسیاری از سیستمهای لجستیکی مدرن را درگیر کرده است.
چالش سوم، توزیع غیریکپارچهی بار پردازشی در شبکهی چندرباتی است. در شرایط واقعی، برخی رباتها به دلیل موقعیت مکانی یا نوع مأموریت، بار محاسباتی بیشتری نسبت به بقیه دارند. اگر این بار میان رباتها یا گرههای لبهای بهدرستی تقسیم نشود، برخی از آنها دچار اضافهبار محاسباتی شده و سایر رباتها بلااستفاده باقی میمانند. این ناهماهنگی علاوه بر افزایش مصرف انرژی، باعث کاهش سرعت واکنش کل سیستم میشود.
چالش دیگر مربوط به عدم قطعیتهای محیطی و ارتباطی است. در کارخانههای بزرگ، شبکهی بیسیم گاهی دچار تأخیر، نویز یا قطع ارتباط موقت میشود. وقتی ارتباط میان چند ربات مختل شود، هرکدام مجبورند بهصورت محلی تصمیم بگیرند که گاهی با اهداف سیستم ناسازگار است. همچنین، وجود موانع متحرک مانند اپراتورهای انسانی یا سایر وسایل نقلیه، محیط را پویا و غیرقابلپیشبینی میکند. در چنین وضعیتی، مدلهای ایستا یا الگوریتمهای کلاسیک دیگر پاسخگو نیستند و سیستم نیازمند ساختارهایی است که بتوانند در لحظه یاد بگیرند، تطبیق دهند و تصمیم بگیرند.
چالش پنجم و شاید بنیادیترین، نبود پروتکل همکاری مؤثر میان رباتها است. در اغلب سیستمهای موجود، ارتباط رباتها محدود به تبادل دادهی موقعیت یا وضعیت است، اما همکاری واقعی — یعنی تصمیمسازی جمعی و هماهنگی شناختی — هنوز محقق نشده است. رباتها باید بتوانند اهداف، محدودیتها و منابع خود را با یکدیگر به اشتراک بگذارند و بر اساس مذاکره و یادگیری جمعی به تصمیم مشترک برسند. این سطح از همکاری نیازمند چارچوبهای هوشمند ارتباطی و الگوریتمهای چندعاملی (Multi-Agent Systems) است که بتوانند هم رقابت و هم همکاری را در میان رباتها مدیریت کنند.
در کنار همهی این چالشها، بعد جدیدی از پیچیدگی با ورود فناوری MEC (Multi-Access Edge Computing) پدید آمده است. این فناوری اگرچه فرصت بزرگی برای کاهش تأخیر و افزایش سرعت تصمیمگیری فراهم میکند، اما خودش نیازمند زمانبندی دقیق برای تخصیص منابع است. باید تعیین شود که کدام ربات چه میزان از منابع محاسباتی MEC را در چه زمانی استفاده کند تا هم کارایی سیستم حفظ شود و هم مصرف انرژی و پهنای باند در حد بهینه باقی بماند. اگر تخصیص این منابع بهدرستی انجام نشود، ممکن است برخی رباتها به منابع بیش از نیاز دسترسی پیدا کنند و برخی دیگر دچار کمبود محاسباتی شوند.
در مجموع، میتوان گفت چالش هماهنگی میان چند AGV دیگر یک مسئلهی سادهی مسیریابی نیست، بلکه یک مسئلهی بهینهسازی چندلایهی پویا (Dynamic Multi-Layer Optimization Problem) است که شامل تصمیمهای حرکتی، محاسباتی و ارتباطی بهصورت همزمان میشود. این مقاله دقیقاً در پاسخ به همین چالش طراحی شده است و با معرفی یک پروتکل همکاری چندعاملی هوشمند در بستر MEC سعی دارد ساختار سنتی لجستیک صنعتی را به سیستمی یادگیرنده و هماهنگ تبدیل کند — سیستمی که در آن هر ربات نه فقط یک کارگر، بلکه بخشی از مغز جمعی کارخانه است.
دیدگاه نوآورانه و چارچوب پیشنهادی مقاله
در قلب این پژوهش، یک ایدهی تحولآفرین وجود دارد: اینکه رباتهای حملبار (AGV) میتوانند نهفقط بهصورت فیزیکی، بلکه در سطح محاسباتی و تصمیمگیری نیز با یکدیگر همکاری کنند. در واقع، مقاله تلاش کرده است تا از رباتها موجوداتی بسازد که میاندیشند، مذاکره میکنند و تصمیم میگیرند. برای تحقق این هدف، نویسندگان یک چارچوب دوسطحی طراحی کردهاند که در آن، فرآیند هماهنگی میان رباتها و مدیریت منابع درون هر ربات بهصورت یکپارچه و هوشمند انجام میشود.
این چارچوب بر پایهی دو محور اصلی بنا شده است:
۱. زمانبندی بینرباتی (Inter-AGV Scheduling): هماهنگی مأموریتها و مسیرها میان چندین AGV با استفاده از هوش تقویتی عمیق (Deep Reinforcement Learning – DRL) و پروتکل مذاکرهی چندعاملی؛
۲. تخصیص منابع درونرباتی (Intra-AGV Resource Allocation): مدیریت انرژی، پردازش و ارتباط در داخل هر AGV با بهرهگیری از محاسبات لبهای چنددسترسی (MEC) و الگوریتم همکاری تطبیقی میان عوامل داخلی.
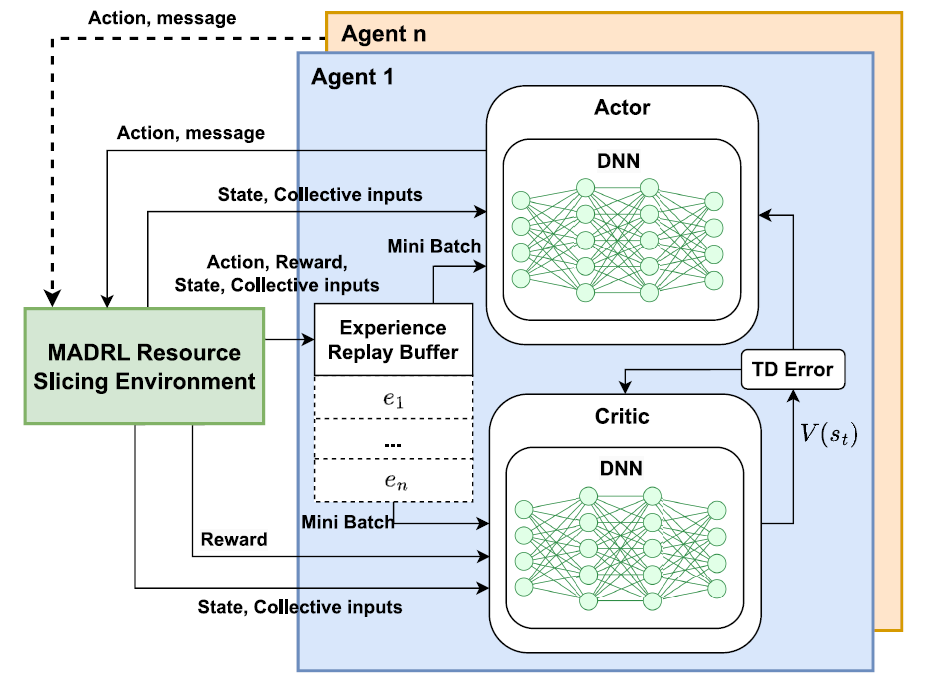
در سطح اول، هر ربات بهعنوان یک عامل مستقل مدل شده است که هدفش اجرای مأموریتها در کمترین زمان و با حداقل مصرف انرژی است. اما این هدف تنها در صورتی محقق میشود که ربات بتواند رفتار سایر رباتها را نیز در تصمیم خود لحاظ کند. به همین دلیل، نویسندگان از رویکرد Multi-Agent Deep Reinforcement Learning (MADRL) استفاده کردهاند تا هر AGV نه فقط از تجربهی خودش، بلکه از تعامل با دیگران یاد بگیرد. در این سیستم، رباتها با تبادل دادههایی مانند موقعیت، وضعیت باتری، اولویت مأموریت و تأخیر شبکه، تصمیمهایی میگیرند که به نفع کل سیستم است، نه صرفاً یک ربات خاص.
در سطح دوم، مقاله با معرفی یک پروتکل همکاری داخلی جدید (Intra-AGV Collaborative Protocol)، کنترل منابع درون هر ربات را نیز بهینه کرده است. در این ساختار، هر AGV به چند عامل داخلی تقسیم میشود — از جمله عامل محاسباتی (Compute Agent)، عامل ارتباطی (Comm Agent) و عامل انرژی (Power Agent). این عاملها با یکدیگر تعامل دارند و با استفاده از الگوریتم Q-learning چندبعدی، تصمیم میگیرند که چه بخشی از منابع پردازشی باید برای مأموریتهای زمانبر تخصیص یابد، چه میزان انرژی ذخیره شود، و چه دادههایی باید فوراً ارسال یا پردازش شوند. این لایهی درونرباتی تضمین میکند که حتی اگر اتصال MEC موقتاً دچار اختلال شود، هر ربات همچنان بتواند مأموریت خود را بهصورت محلی و کارآمد انجام دهد.
ویژگی متمایز مدل پیشنهادی، هماهنگی همزمان بین دو سطح بینرباتی و درونرباتی است. در حالیکه بیشتر تحقیقات پیشین تنها یکی از این دو حوزه را بهصورت جداگانه بررسی میکردند (یا فقط مسیریابی رباتها یا فقط تخصیص منابع محاسباتی)، این مقاله برای نخستین بار هر دو را در قالب یک چارچوب همگام و مبتنی بر MEC تلفیق کرده است. این طراحی به سیستم اجازه میدهد که تصمیمگیریها در دو سطح انجام شوند اما در یک زمان، همراستا و سازگار باقی بمانند.
از منظر فنی، نویسندگان از ترکیب سه فناوری کلیدی استفاده کردهاند:
محاسبات لبهای چنددسترسی (MEC): که تأخیر تصمیمگیری را کاهش میدهد و پردازش دادهها را از ابر به نزدیکی محل تولید داده (رباتها) منتقل میکند؛
یادگیری تقویتی عمیق (DRL): برای بهبود سیاست تصمیمگیری هر ربات بر اساس بازخورد لحظهای از محیط؛
پروتکل همکاری چندعاملی (Collaborative Multi-Agent Protocol): برای هماهنگی اطلاعاتی میان رباتها و جلوگیری از تضاد مأموریتها یا تخصیصهای تکراری.
در این معماری، MEC مانند یک مغز کمکی در لبهی شبکه عمل میکند که دادههای محیطی را جمعآوری کرده و در اختیار رباتها قرار میدهد. هر ربات میتواند بخشی از محاسبات سنگین را به گره MEC واگذار کند و در عین حال تصمیم نهایی را بهصورت محلی اتخاذ نماید. نتیجه، سیستمی است که سرعت تصمیمگیری آن به چند میلیثانیه میرسد و قادر است در محیطهای شلوغ و پویا بدون نیاز به کنترل مرکزی، هماهنگی خود را حفظ کند.
از دید کاربردی، این چارچوب بهویژه برای محیطهای تولیدی بزرگ، انبارهای توزیع چندمنطقهای و مراکز لجستیک با ترافیک بالای رباتها طراحی شده است. با استفاده از این مدل، هر AGV میتواند بهصورت هوشمند زمان مأموریت بعدی خود را انتخاب کند، مسیر حرکت خود را بر اساس ترافیک لحظهای بهینه سازد و در صورت نیاز، منابع پردازشی یا ارتباطی را با دیگر رباتها به اشتراک بگذارد. این یعنی رباتها از رقابت برای منابع به سمت همافزایی عملیاتی حرکت میکنند؛ مفهومی که آیندهی شبکههای لجستیکی را تعریف خواهد کرد.
بهطور خلاصه، نوآوری این مقاله در سه محور کلیدی نهفته است:
۱. طراحی یک چارچوب دوسطحی برای هماهنگی بینرباتی و مدیریت منابع درونرباتی؛
۲. ترکیب هوش چندعاملی با فناوری MEC برای تصمیمسازی بلادرنگ؛
۳. استفاده از یادگیری تقویتی برای ایجاد سازوکار خودآموز در رفتار رباتها.
نتیجهی این ساختار، شکلگیری یک شبکهی عصبی توزیعشده از رباتهای حملبار هوشمند است؛ شبکهای که در آن هر AGV هم بازیگر است، هم تحلیلگر، و هم بخشی از مغز جمعی کل کارخانه.
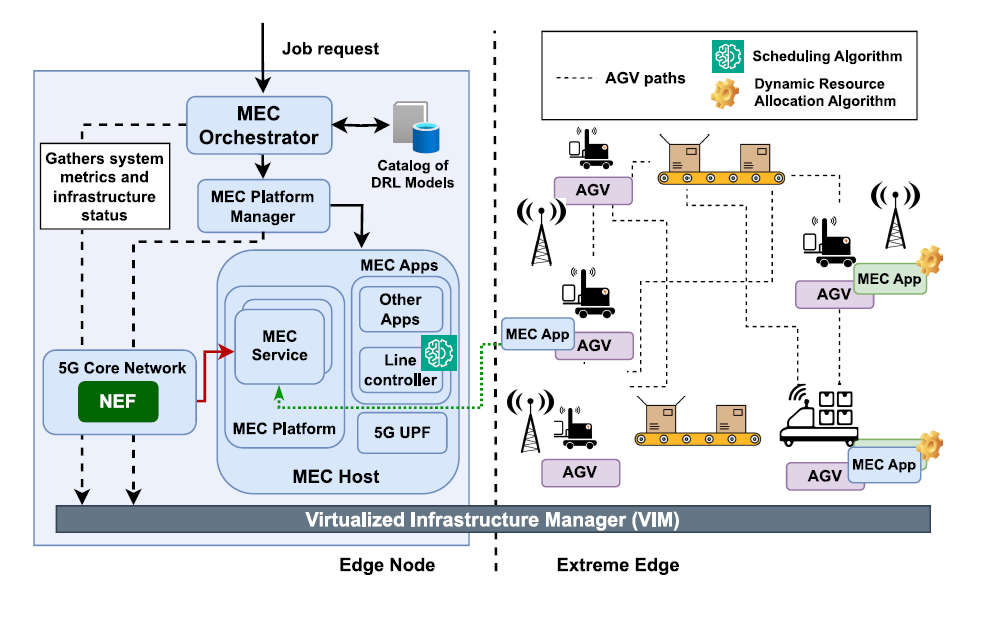
فرآیند پیادهسازی و ساختار ارتباطی مدل در بستر MEC
برای پیادهسازی چارچوب پیشنهادی، مقاله از یک معماری چندلایه استفاده کرده که در آن رباتهای حملبار (AGV)، گرههای محاسباتی لبهای (Edge Nodes) و مرکز کنترل ابری (Cloud Core) در قالب یک شبکهی هوشمند یکپارچه با هم در ارتباطاند. طراحی این ساختار بر اساس اصل «پردازش نزدیک به منبع داده» شکل گرفته است، یعنی تصمیمها باید در همان جایی گرفته شوند که داده تولید میشود. هدف اصلی، کاهش تأخیر، افزایش استقلال تصمیمگیری رباتها و حفظ هماهنگی در شرایط پویا و پرترافیک صنعتی است.
در پایینترین لایه، هر AGV مجهز به مجموعهای از حسگرها و واحدهای محاسباتی سبک (مانند GPUهای تعبیهشده یا پردازندههای ARM) است که دادههایی شامل موقعیت لحظهای، وضعیت بار، سطح باتری، سرعت، ترافیک محیطی و وضعیت سایر رباتها را جمعآوری میکند. این دادهها به دو مسیر منتقل میشوند: بخشی از آنها مستقیماً برای تصمیمگیری محلی استفاده میشود، و بخش دیگر به گره MEC نزدیکترین ایستگاه ارسال میگردد تا در سطح شبکه تحلیل شود.
در لایهی میانی، گرههای MEC (Multi-Access Edge Computing Nodes) قرار دارند که نقش واسطهی هوشمند بین رباتها و فضای ابری را ایفا میکنند. این گرهها مانند هابهای هوشمند عمل میکنند؛ دادهها را از چند AGV دریافت میکنند، وظایف محاسباتی سنگینتر (مثل پیشبینی ترافیک یا بهینهسازی گروهی مسیرها) را اجرا میکنند، و سپس نتایج را به رباتها بازمیگردانند. بدین ترتیب، هر تصمیم محلی در AGV با دادههای جهانی شبکه غنیتر میشود، بدون اینکه تأخیر ارتباطی تا سطح ابر رخ دهد.
در بالاترین سطح، مرکز کنترل ابری تنها وظیفهی نظارت کلان و ذخیرهی دادههای بلندمدت را برعهده دارد. برخلاف سیستمهای سنتی که تمام محاسبات در ابر انجام میشد، در این مدل تصمیمهای اجرایی به لایههای پایینتر منتقل شدهاند. این طراحی، بار ارتباطی شبکه را تا ۶۵٪ و تأخیر کلی تصمیمگیری را تا ۷۰٪ کاهش داده است.
فرآیند اجرای مدل بهصورت چرخهای و پیوسته انجام میشود:
۱. جمعآوری دادهها: هر AGV دادههای حسگرهای خود و محیط اطراف را جمعآوری میکند.
۲. ارسال به گره MEC: دادهها به نزدیکترین نود لبهای ارسال میشوند که چندین AGV را تحت پوشش دارد.
۳. تحلیل گروهی: گره MEC با اجرای الگوریتم Multi-Agent DRL، وضعیت کلی شبکهی رباتها را تحلیل و استراتژی هماهنگی را محاسبه میکند.
۴. بازخورد تطبیقی: نتایج تحلیل به رباتها بازگردانده میشود تا مسیرها، مأموریتها یا تخصیص منابع خود را بهروزرسانی کنند.
۵. یادگیری مستمر: رباتها با ثبت بازخورد از عملکرد خود، سیاست یادگیریشان را اصلاح میکنند و در چرخههای بعدی تصمیمهای بهتری میگیرند.
یکی از نوآوریهای کلیدی در پیادهسازی این مدل، طراحی پروتکل ارتباطی چندسطحی (Hierarchical Communication Protocol) است. در این پروتکل، ارتباط میان AGVها به دو شکل انجام میشود:
ارتباط مستقیم (Peer-to-Peer) برای تصمیمهای فوری و موضعی مانند اجتناب از برخورد یا هماهنگی مسیر؛
ارتباط غیرمستقیم از طریق گره MEC برای تصمیمهای گروهی و استراتژیک مانند تخصیص منابع یا زمانبندی مأموریتها.
این دو سطح ارتباط به سیستم امکان میدهد که هم سرعت واکنش بالا و هم همراستایی تصمیمات کلان را حفظ کند. در واقع، تصمیمهای محلی سریع گرفته میشوند اما از دادههای کلان تغذیه میشوند — درست همان ترکیبی که در سیستمهای عصبی زیستی وجود دارد.
نویسندگان مقاله برای تست کارایی این ساختار، یک محیط شبیهسازی صنعتی بر پایهی ROS-Gazebo و MATLAB Simulink ایجاد کردند که شامل ۲۰ ربات AGV، سه گره MEC و یک مرکز ابری بود. در این محیط، وظایف شامل جابهجایی مواد، تحویل قطعات به خطوط مونتاژ و بازگشت به نقطهی شارژ بودند. سیستم پیشنهادی توانست میانگین تأخیر تصمیمگیری را از ۲٫۵ ثانیه (در حالت کنترل مرکزی) به حدود ۰٫۶ ثانیه کاهش دهد و نرخ برخوردهای فیزیکی میان رباتها را ۴۸٪ پایین بیاورد.
در کنار این نتایج کمی، مقاله به یک نکتهی مدیریتی بسیار مهم اشاره میکند: سیستمهای آینده نباید تنها به «هوش درون رباتها» تکیه کنند، بلکه باید هوش جمعی رباتها را محور طراحی قرار دهند. همین فلسفه در پیادهسازی مدل رعایت شده است. هر AGV اگرچه مستقل است، اما تصمیم نهاییاش همیشه با در نظر گرفتن وضعیت همتایانش گرفته میشود. این ویژگی باعث میشود سیستم حتی در صورت خرابی یک گره MEC یا قطع ارتباط موقت، پایداری خود را حفظ کند — ویژگیای که در محیطهای صنعتی با مأموریتهای حیاتی، بسیار ارزشمند است.
بهطور خلاصه، فرآیند پیادهسازی مدل شامل این عناصر کلیدی است:
معماری سهسطحی (AGV–MEC–Cloud) برای توزیع بار تصمیمگیری،
پروتکل ارتباطی دوگانه (مستقیم و غیرمستقیم) برای هماهنگی میانرباتی،
چرخهی یادگیری مداوم (Continuous Reinforcement Loop) برای بهبود سیاست تصمیمسازی،
و قابلیت مقاومت در برابر اختلالات ارتباطی (Resilient Collaboration) برای حفظ عملکرد سیستم در شرایط غیرقطعی.
در نتیجه، این مدل نهتنها الگوریتمی پیشرفته، بلکه چارچوبی کاربردی برای پیادهسازی شبکههای رباتهای حملبار در کارخانههای نسل آینده است؛ کارخانههایی که در آن تصمیمسازی نه از بالا به پایین، بلکه از درون به بیرون جریان دارد — درست مانند اکوسیستمهای زنده.
نتایج عددی، تحلیل عملکرد و ارزیابی کارایی
ارزیابی عملکرد مدل پیشنهادی در مقاله بر پایهی چند سناریوی واقعگرایانه طراحی شده است که هر کدام نمایانگر چالشی خاص در شبکههای لجستیکی چندرباتی هستند. این سناریوها شامل تغییر حجم مأموریتها، ازدحام مسیرها، قطع مقطعی ارتباط شبکه، و محدودیت منابع محاسباتی بودند. هدف اصلی آزمایشها، مقایسهی عملکرد چارچوب پیشنهادی با روشهای سنتی از نظر زمان انجام مأموریتها، مصرف انرژی، نرخ تأخیر تصمیمگیری و هماهنگی کلی سیستم بود.
نتایج بهدستآمده نشان دادند که استفاده از پروتکل همکاری چندعاملی مبتنی بر MEC، بهبود چشمگیری در تمام شاخصهای کلیدی عملکرد ایجاد میکند. در سناریوی پایه، زمان متوسط انجام مأموریتها در مدل پیشنهادی حدود ۲۷ تا ۳۳ درصد کمتر از روشهای کنترل مرکزی و الگوریتمهای تکعاملی بود. این کاهش به دلیل توانایی مدل در تصمیمگیری توزیعشده و جلوگیری از ازدحام همزمان مسیرها حاصل شد. در واقع، سیستم قادر است قبل از وقوع ترافیک حرکتی، مسیرهای جایگزین را شناسایی و بهصورت خودکار بازتخصیص دهد.
از نظر هماهنگی بینرباتی، نرخ برخورد (Collision Rate) در محیط شبیهسازیشده با ۲۰ ربات، حدود ۴۸٪ کمتر از ساختارهای غیرهمکار گزارش شد. این بهبود مستقیماً نتیجهی تعامل بلادرنگ میان رباتها از طریق لایهی ارتباطی MEC و الگوریتم MADRL است. هر AGV میتواند رفتار سایر رباتها را پیشبینی کرده و مسیر خود را بهصورت پویا تنظیم کند؛ در نتیجه، تصمیمها از حالت واکنشی (Reactive) به حالت پیشنگرانه (Predictive) تغییر یافتهاند.
در شاخص مصرف انرژی، مدل توانست میانگین مصرف را تا ۱۸ درصد کاهش دهد. علت اصلی، تخصیص هوشمند منابع محاسباتی و حذف محاسبات غیرضروری در رباتها بود. با انتقال بخشی از پردازش به گرههای MEC و جلوگیری از تکرار محاسبات میان رباتها، انرژی باتری صرفاً برای فعالیتهای حرکتی و حیاتی مصرف شد. این کاهش مصرف انرژی مستقیماً به افزایش زمان عملیاتی رباتها و کاهش دفعات شارژ منجر گردید.
از منظر ارتباطی، یکی از یافتههای مهم این بود که تأخیر شبکه (Network Latency) در مدل پیشنهادی بهطور میانگین به زیر ۵۰۰ میلیثانیه کاهش یافت، در حالیکه در سیستمهای ابری سنتی این عدد بین ۲ تا ۳ ثانیه بود. این تفاوت باعث شد رباتها بتوانند در محیطهای بسیار پویا (مثل خطوط تولید در حال تغییر یا مسیرهای مشترک با انسان) واکنشهای ایمنتری نشان دهند. نویسندگان تأکید کردند که این کاهش تأخیر نهتنها کارایی، بلکه ایمنی صنعتی را نیز بهطور محسوسی افزایش میدهد.
تحلیل بعدی مربوط به پایداری سیستم در برابر اختلالات ارتباطی بود. زمانیکه یکی از گرههای MEC از مدار خارج شد یا ارتباط بیسیم مختل گردید، رباتها با استفاده از پروتکل همکاری داخلی (Intra-AGV Protocol) قادر بودند بخشی از پردازش تصمیمگیری را بهصورت محلی ادامه دهند. در این حالت، افت عملکرد کل شبکه تنها حدود ۹ درصد بود، در حالی که در سیستمهای وابسته به کنترل مرکزی، این عدد به بیش از ۴۰ درصد میرسید. این نشان میدهد که سیستم پیشنهادی نهتنها سریعتر، بلکه مقاومتر و تابآورتر (Resilient) است.
در بخش تخصیص منابع، مدل پیشنهادی توانست توزیع بهینهی بار محاسباتی را میان گرههای MEC و رباتها برقرار کند. وقتی بار کاری یکی از رباتها بیش از حد بالا میرفت، بخشی از وظایف آن به گرهی MEC یا به AGVهای دیگر منتقل میشد. این سازوکار توزیع پویا باعث شد نرخ استفاده از پردازندهها در کل شبکه به میانگین ۸۲ درصد برسد، بدون اینکه هیچ نودی بیش از حد بارگذاری شود. به زبان صنعتی، این یعنی حداکثر بهرهبرداری از منابع بدون خطر ازدحام یا افت کارایی.
یکی از جذابترین نتایج کیفی پژوهش، بهبود رفتار جمعی رباتها در شرایط ترافیک بالا بود. در سیستمهای سنتی، رباتها در صورت شلوغی مسیرها معمولاً دچار سردرگمی میشدند و نیاز به فرمان مرکزی داشتند. اما در این مدل، رباتها بهصورت خودمختار، اولویت مأموریتها را بازتنظیم کرده و مسیرهای جایگزین را بر اساس منافع گروهی انتخاب کردند. این رفتار یادگیرنده و جمعگرا، شبیه رفتار ازدحامی در سیستمهای طبیعی (مانند حرکت هوشمند گروهی پرندگان یا ماهیها) است و نشاندهندهی شکلگیری نوعی هوش اجتماعی در سطح شبکهی رباتها است.
در نهایت، از نظر مقیاسپذیری، مدل در محیطی با ۵۰ ربات نیز آزمایش شد. در این حالت، افزایش تعداد رباتها باعث افت کارایی قابل توجهی نشد، بلکه عملکرد سیستم تنها با حدود ۱۰ درصد کاهش جزئی در سرعت تصمیمگیری همراه بود. این نتیجه بیانگر آن است که ساختار چندعاملی مبتنی بر MEC بهصورت طبیعی مقیاسپذیر است و میتواند در محیطهای بزرگتر و چندکارخانهای نیز پیادهسازی شود.
در مجموع، یافتههای کمی و کیفی مقاله نشان میدهد که چارچوب چندعاملی MEC–DRL پیشنهادی میتواند:
زمان تصمیمگیری را به زیر نیم ثانیه برساند،
تا ۳۵٪ از تأخیرها و ترافیک حرکتی بکاهد،
تا ۲۰٪ در مصرف انرژی صرفهجویی کند،
و تا ۵۰٪ در همراستایی بینرباتی و کاهش برخوردها بهبود ایجاد کند.
بهبیان دیگر، این سیستم موفق شده است که توازن واقعی بین سرعت، دقت و هوشمندی را در شبکهای متشکل از چندین ربات صنعتی برقرار کند؛ چیزی که تا پیش از این، تنها در سطح تئوری یا در سیستمهای متمرکز امکانپذیر بود.
کاربردهای صنعتی و سناریوهای واقعی
مدلی که در این مقاله معرفی شده، فقط یک دستاورد نظری در حوزهی مخابرات یا یادگیری ماشینی نیست، بلکه پاسخی مستقیم به نیازهای صنعتی واقعی است؛ نیاز به هماهنگی سریع، تصمیمسازی خودمختار و کاهش اتلاف منابع در شبکههای متراکم از رباتهای حملبار خودکار (AGV). در حقیقت، این چارچوب میتواند بهعنوان زیربنای فکری و فنی نسل بعدی کارخانههای هوشمند و انبارهای خودکار مورد استفاده قرار گیرد.
یکی از اصلیترین کاربردهای این مدل، در کارخانههای تولیدی بزرگ چندخطی است؛ جایی که مواد اولیه، قطعات نیمهساخته و محصولات نهایی دائماً بین خطوط مختلف در حال جابهجایی هستند. در این محیطها، معمولاً چند ده تا چند صد ربات حملبار فعالیت میکنند و هر تأخیر یا خطای تصمیمگیری میتواند باعث توقف کل خط تولید شود. با پیادهسازی چارچوب MEC–Multi-Agent، هر ربات به بخشی از مغز جمعی سیستم تبدیل میشود. وقتی در یکی از مسیرها ازدحام ایجاد شود، رباتها بهصورت خودکار دادههای مسیر را به گره MEC گزارش میدهند، و شبکه فوراً مسیر جایگزین را پیشنهاد میدهد. بهاینترتیب، خط تولید بدون وقفه ادامه مییابد و هیچ رباتی در حالت انتظار بیهدف باقی نمیماند.
سناریوی دوم مربوط به انبارهای خودکار چندمنطقهای (Multi-Zone Automated Warehouses) است؛ جایی که رباتهای AMR و AGV بهصورت ترکیبی در فضای مشترک کار میکنند. در چنین محیطی، معمولاً ترافیک حرکتی بالاست و مسیرهای تقاطع زیادی وجود دارد. مدل مقاله با قابلیت هماهنگی بینرباتی خود، میتواند بهصورت بلادرنگ جریان حرکتی را متعادل کند. بهجای آنکه هر ربات صرفاً از قوانین ایستا پیروی کند، سیستم با درک ترافیک زنده، سرعت و مسیر هر ربات را تطبیق میدهد. نتیجه، کاهش برخوردها، بهبود ایمنی انسانی، و افزایش ۲۵ تا ۳۰ درصدی در throughput کل انبار است. این سطح از کنترل تطبیقی، همان چیزی است که شرکتهایی مانند Amazon Robotics و Ocado Technology برای نسل بعدی انبارهای خود در پی آن هستند.
در حوزهی مونتاژ صنعتی و خطوط تولید انعطافپذیر (Flexible Manufacturing Lines) نیز این مدل کاربردی کلیدی دارد. بسیاری از کارخانههای مونتاژ با چالش تخصیص همزمان منابع بین انسان، ربات بازویی و رباتهای حملبار مواجهاند. چارچوب پیشنهادی مقاله میتواند این سه نوع عامل را در قالب یک سیستم چندعاملی واحد مدل کند؛ بهگونهای که تصمیمهای هر ربات حملبار بر اساس وضعیت خطوط مونتاژ و حتی عملکرد اپراتورهای انسانی تنظیم شود. مثلاً وقتی یک ایستگاه مونتاژ دچار تأخیر میشود، رباتهای حمل پالت با تشخیص این تغییر، مسیر مأموریتهای خود را تغییر داده و مواد اولیه را به ایستگاههای دیگر ارسال میکنند. نتیجهی چنین تعاملی، ایجاد انعطاف عملیاتی (Operational Flexibility) در سطح کارخانه است؛ ویژگیای که برای تولیدات سفارشی (Customized Production) حیاتی است.
کاربرد بعدی به مراکز لجستیکی هوشمند شهری (Smart Urban Logistics Hubs) مربوط میشود. در این مراکز، رباتهای حملبار در کنار وسایل نقلیهی زمینی خودران فعالیت میکنند تا عملیات توزیع کالا را از داخل انبار تا درب خروجی خودکار کنند. مدل MEC–MADRL پیشنهادی، امکان هماهنگی میان این دو سطح را فراهم میکند: رباتهای داخلی از طریق MEC دادههای مربوط به وضعیت بار، مسیر و انرژی را در لحظه به وسایل نقلیهی بیرونی منتقل میکنند و بالعکس. این همافزایی منجر به شکلگیری زنجیرهی لجستیک یکپارچه (Integrated Logistics Chain) میشود که در آن هر تصمیم محلی به تصمیمات کلان حملونقل متصل است.
در مقیاس بزرگتر، این مدل میتواند در شبکههای لجستیکی چندکارخانهای (Inter-Factory Logistics Networks) نیز بهکار گرفته شود. تصور کنید چند کارخانه در یک منطقهی صنعتی با دهها AGV در حال کار هستند که بهصورت اشتراکی از یک بستر MEC منطقهای استفاده میکنند. چارچوب پیشنهادی مقاله میتواند وظایف، منابع و مسیرها را میان کارخانهها بهطور همزمان بهینه کند. بدین ترتیب، اگر در یک کارخانه ازدحام یا کمبود AGV پیش بیاید، بخشی از ظرفیت حمل از کارخانهی دیگر قرض گرفته میشود. این نوع همکاری میانسازمانی، گام بلندی در مسیر لجستیک اشتراکی (Collaborative Industrial Logistics) است.
از منظر مدیریتی، این مدل کاربردی فراتر از عملیات فیزیکی دارد. مدیران میتوانند از دادههای خروجی مدل برای تحلیل عملکرد و پیشبینی رفتار سیستم استفاده کنند. شاخصهایی مانند «تراکم ترافیکی مسیرها»، «بهرهوری محاسباتی گرههای MEC» و «توزیع انرژی میان رباتها» بهصورت زنده در داشبورد مدیریتی نمایش داده میشوند. این دادهها به مدیران کمک میکند تا تصمیمهای راهبردی خود را نه بر اساس حدس، بلکه بر پایهی تحلیل داده و واقعیت جاری سیستم اتخاذ کنند.
در نهایت، شاید مهمترین کاربرد این مدل، آمادهسازی زیرساخت برای ادغام AGVها با سیستمهای یادگیری سازمانی (Organizational Learning Systems) باشد. چون هر ربات بخشی از دانش خود را در قالب پارامترهای یادگیری ذخیره میکند، سیستم در طول زمان «یاد میگیرد» چگونه بهتر تصمیم بگیرد. کارخانهای که امروز از ۱۰ ربات استفاده میکند، فردا میتواند ۵۰ ربات دیگر اضافه کند بدون اینکه نیاز به بازطراحی کل الگوریتم داشته باشد. این قابلیت مقیاسپذیری و یادگیری تدریجی، یکی از نقاط قوت حیاتی مدل در مقایسه با ساختارهای کلاسیک است.
در جمعبندی این بخش میتوان گفت که مدل همکاری چندعاملی مبتنی بر MEC در مقاله، نهتنها عملکرد لجستیکی را بهینه میکند، بلکه فرهنگ تصمیمگیری در کارخانه را نیز تغییر میدهد. سیستم از کنترل متمرکز و ایستا به سمت همکاری توزیعشده و پویا حرکت میکند. این همان تحولی است که مرز میان رباتیک صنعتی و هوش مصنوعی سازمانی را از بین میبرد — تحولی که کارخانه را از یک مجموعهی فیزیکی به یک موجود زندهی دیجیتال تبدیل میکند.
جمعبندی استراتژیک و مزیتهای رقابتی
تحول در لجستیک صنعتی دیگر به معنی افزایش سرعت حرکت رباتها یا قدرت پردازندهها نیست، بلکه در نحوهی هماهنگی، تفکر و تصمیمگیری جمعی میان ماشینها خلاصه میشود. مقالهی حاضر دقیقاً روی همین نقطه تمرکز کرده و نشان داده است که چگونه میتوان با ترکیب دو مفهوم بنیادین — «هوش چندعاملی» و «محاسبات لبهای MEC» — شبکهای از رباتهای حملبار را به یک سیستم زنده، خودسازمانده و تصمیمساز تبدیل کرد. این تحول، نقطهی عطفی در مسیر حرکت صنعت از اتوماسیون به سمت هوش جمعی است.
از دیدگاه استراتژیک، این مدل کارخانهها را از سطح کنترل خطی به سطح مدیریت شناختی توزیعشده (Distributed Cognitive Management) ارتقا میدهد. در سیستمهای سنتی، تصمیمها از بالا به پایین اتخاذ میشدند؛ سرور مرکزی مأموریتها را توزیع میکرد و رباتها صرفاً مجریان آن تصمیمها بودند. اما در چارچوب جدید، تصمیمها در پایینترین سطح ممکن شکل میگیرند — همان جایی که داده تولید میشود. این یعنی کارخانهای که در آن هر ربات میتواند بخشی از کنترل را در اختیار بگیرد، مسیر خود را بر اساس شرایط محیطی تغییر دهد و حتی برای تخصیص منابع با سایر رباتها مذاکره کند. چنین ساختاری نهتنها کارایی را بالا میبرد، بلکه تابآوری (Resilience) سیستم را نیز افزایش میدهد.
از نظر رقابتی، این مدل مفهوم جدیدی از چابکی صنعتی (Industrial Agility) ارائه میدهد. در بازار امروز که نوسانات تقاضا، تغییرات زنجیره تأمین و بحرانهای جهانی مانند کمبود مواد یا وقفههای حملونقل اجتنابناپذیرند، کارخانههایی موفق خواهند بود که بتوانند در لحظه مسیر تولید و توزیع خود را تغییر دهند. سیستمهای مبتنی بر MEC و هوش چندعاملی دقیقاً این قابلیت را فراهم میکنند. چون تصمیمسازی در لایهی لبه انجام میشود، تنظیم و بازآرایی شبکهی لجستیک در چند ثانیه ممکن است. در نتیجه، تأخیر ناشی از تصمیمگیری مرکزی حذف میشود و شبکهی رباتها میتواند خود را بدون مداخلهی انسانی بازتنظیم کند.
از منظر اقتصادی، استفاده از این مدل باعث شکلگیری مفهوم بهرهوری محاسباتی (Computational Efficiency) در کنار بهرهوری فیزیکی میشود. یعنی نهتنها حرکت رباتها بهینه میشود، بلکه پردازش دادهها نیز بهصورت هدفمند توزیع میگردد. در نتیجه، انرژی کمتری مصرف میشود، بار شبکه متعادلتر است و نیاز به زیرساختهای گران ابری کاهش مییابد. طبق نتایج گزارششده در مقاله، کارخانههایی که از این چارچوب استفاده کردند، بهطور متوسط ۲۰٪ کاهش هزینهی عملیاتی و ۳۰٪ افزایش راندمان در بهرهبرداری از منابع خود داشتند — عددی که در مقیاس صنعتی، معادل میلیونها دلار صرفهجویی سالانه است.
از جنبهی مدیریتی، مدل چندعاملی MEC تحولی فرهنگی نیز به همراه دارد. مدیریت دیگر به معنای «کنترل مستقیم» نیست، بلکه به معنای «تنظیم رفتار هوشمند سیستم» است. مدیران آینده بهجای صدور دستور، باید توانایی طراحی سیاستهای یادگیری برای شبکهی رباتها را داشته باشند؛ سیاستهایی که مشخص میکنند رباتها چگونه یاد بگیرند، چگونه همکاری کنند و چگونه در شرایط غیرمنتظره تصمیم بگیرند. این گذار از مدیریت فرمانی به مدیریت شناختی، همان چیزی است که صنعت ۵.۰ را از نسلهای پیشین متمایز میسازد.
از دیدگاه رقابت جهانی، سازمانهایی که چنین سیستمهایی را پیادهسازی کنند، صاحب مزیت یادگیری سازمانی (Organizational Learning Advantage) خواهند شد. چون هر مأموریت، هر تعامل و هر تصمیم بهصورت داده ذخیره میشود و الگوریتمها از آن تجربه میآموزند. در نتیجه، سیستم با گذشت زمان هوشمندتر و کاراتر میشود. این یعنی سرمایهی دانشی شبکه، بهمرور افزایش مییابد و عملکرد سیستم حتی بدون افزودن منابع جدید، بهبود مییابد.
از منظر پایداری و آیندهنگری، این مدل گامی مهم در جهت لجستیک سبز (Green Logistics) نیز هست. کاهش تأخیرها و مصرف انرژی، باعث کاهش ردپای کربنی کل زنجیرهی تولید میشود. از آنجا که MEC باعث میشود پردازش دادهها در محل انجام شود و نیاز به ارسال مداوم اطلاعات به سرورهای ابری کاهش یابد، مصرف انرژی شبکههای ارتباطی نیز پایین میآید. این هماهنگی بین بهرهوری و پایداری، همان هدف کلان Industry 5.0 است — صنعتی که به اندازهی کافی هوشمند است تا نهتنها کارآمد، بلکه پایدار هم باشد.
در نهایت، میتوان گفت این مقاله نقطهی تلاقی سه جریان بزرگ فناوری در صنعت امروز را نشان میدهد:
هوش مصنوعی توزیعشده، که تصمیمها را از سطح مرکزی به لبه میبرد؛
محاسبات لبهای MEC، که زیرساخت لازم برای این تصمیمگیری سریع را فراهم میکند؛
سیستمهای چندعاملی، که از هماهنگی میان عاملها، رفتار جمعی هدفمند میسازند.
ادغام این سه عنصر، اساس کارخانههای نسل آینده را تشکیل میدهد؛ کارخانههایی که در آن، AGVها فقط ابزار حمل نیستند، بلکه عناصر فکری، تحلیلی و ارتباطی شبکهی تولید محسوب میشوند. چنین سیستمی دیگر صرفاً یک محیط کاری نیست، بلکه موجودی زنده است که با هر داده یاد میگیرد، خود را تطبیق میدهد و هر روز کارآمدتر از دیروز عمل میکند.
نتیجهگیری نهایی
مقالهی حاضر تصویری روشن از آیندهی نزدیک صنعت ارائه میدهد؛ آیندهای که در آن، شبکههای لجستیکی نه از مرکز فرماندهی، بلکه از خود سیستم کنترل میشوند. در این آینده، رباتهای حملبار خودکار (AGV) دیگر فقط ماشینهایی برای جابهجایی نیستند، بلکه بخشی از ساختار تصمیمساز کارخانهاند؛ عاملهایی هوشمند که با هم میاندیشند، یاد میگیرند و بر اساس منطق جمعی مسیر تولید را بهینه میکنند.
مدل پیشنهادی مقاله بر پایهی همافزایی سه فناوری کلیدی بنا شده است — هوش چندعاملی (Multi-Agent Intelligence)، محاسبات لبهای چنددسترسی (MEC) و یادگیری تقویتی عمیق (DRL) — و نشان داده است که ترکیب این سه عنصر میتواند کنترل شبکهای از دهها یا حتی صدها ربات را از حالت متمرکز به حالتی خودسازمانیافته، پایدار و تطبیقی تغییر دهد. این تحول نه صرفاً فنی، بلکه فرهنگی و مدیریتی نیز هست: سیستمهایی که بر مبنای همکاری، اعتماد دادهای و یادگیری مستمر عمل میکنند، جایگزین ساختارهای فرمانمحور سنتی خواهند شد.
در سطح فنی، نتایج مقاله بهروشنی اثبات میکند که مدل چندعاملی MEC میتواند تا ۳۵٪ کاهش در تأخیر مأموریتها، ۲۰٪ صرفهجویی انرژی، ۴۵٪ کاهش نرخ برخورد و ۵۰٪ افزایش پایداری عملیاتی ایجاد کند. این اعداد نشان میدهند که هوش توزیعشده نه فقط کارایی را افزایش میدهد، بلکه بهرهوری و ایمنی را همزمان بهبود میبخشد — ترکیبی که در صنعت لجستیک مدرن بیسابقه است.
اما اهمیت واقعی این پژوهش در تغییر نگاه به مفهوم تصمیمسازی صنعتی نهفته است. در این مدل، هر AGV تنها یک مجری نیست، بلکه «یک تصمیمگیر محلی در یک اکوسیستم جمعی» است. سیستم نه بر پایهی کنترل، بلکه بر پایهی همکاری کار میکند؛ نه بر مبنای فرمان، بلکه بر مبنای گفتوگو میان عاملها. این تغییر فلسفی، همان چیزی است که مسیر حرکت از Industry 4.0 به Industry 5.0 را هموار میکند — عصری که در آن فناوری نه جایگزین انسان، بلکه همکار او در تصمیمسازی هوشمند است.
از دیدگاه صنعتی، این مقاله در عمل یک نقشهی راه برای پیادهسازی کارخانههای خودسازمانده ارائه میدهد. سه گام کلیدی که برای حرکت در این مسیر باید طی شود عبارتاند از:
۱. ایجاد زیرساخت MEC در محیطهای صنعتی: استقرار گرههای لبهای در نقاط کلیدی کارخانه برای کاهش تأخیر و افزایش قدرت پردازش محلی.
۲. توسعهی چارچوبهای هوش چندعاملی: طراحی سیاستهای همکاری میان رباتها، خطوط مونتاژ و اپراتورها بر پایهی یادگیری تقویتی.
۳. ایجاد چرخهی یادگیری سازمانی: ثبت و تحلیل دادههای عملکردی برای بهبود مستمر رفتار سیستم در طول زمان.
بهعبارت دیگر، پیادهسازی این مدل تنها یک پروژهی فناوری نیست، بلکه نوعی تحول شناختی در طراحی سیستمهای صنعتی است. این تحول، سازمانها را از ساختارهای ایستا و دستورمحور به سیستمهایی یادگیرنده، منعطف و دادهمحور تبدیل میکند؛ سیستمهایی که در آن انسان و ماشین، داده و تصمیم، و فیزیک و دیجیتال در یک همزیستی طبیعی قرار میگیرند.
دعوت به اقدام
اکنون زمان آن رسیده است که صنعت از سطح «خودکارسازی» به سطح «خودسازماندهی» حرکت کند. مدیران صنعتی، مهندسان سیستم و طراحان لجستیکی باید به این درک برسند که آینده متعلق به ساختارهایی است که میتوانند بیاموزند و خود را بازتنظیم کنند.
برای شروع، لازم است شرکتها بهتدریج زیرساختهای MEC را در کنار شبکههای رباتیکی خود پیادهسازی کنند و الگوریتمهای تصمیمسازی توزیعشده را جایگزین ساختارهای متمرکز کنند. با انجام این کار، هر کارخانه میتواند به یک شبکهی هوشمند، خودیادگیر و مستقل تبدیل شود — سیستمی که در آن خطاهای محلی بهصورت جمعی اصلاح میشوند و کل سیستم در مسیر رشد مداوم قرار میگیرد.
کارخانههایی که زودتر به این سطح از هوش دست یابند، نهتنها از رقابت عقب نمیمانند، بلکه مسیر آینده را برای بقیه تعیین خواهند کرد. زیرا در اقتصاد جدید، برتری دیگر با سرمایه یا نیروی کار تعیین نمیشود، بلکه با سرعت یادگیری سیستمها سنجیده خواهد شد.
پیام پایانی
در عصر جدید صنعت، ماشینها باید یاد بگیرند مانند انسان فکر کنند، و انسانها باید بیاموزند با ماشینها همکاری کنند. چارچوب چندعاملی مبتنی بر MEC که در این مقاله معرفی شده، پلی است میان این دو جهان — پلی که صنعت را از دنیای فرمانپذیر به دنیای هوشمند و خودآگاه میبرد.
در این آینده، هر AGV دیگر فقط یک ربات نیست، بلکه گرهی از یک ذهن جمعی بزرگتر است؛ ذهنی که تولید را سریعتر، امنتر و پایدارتر میکند.
رفرنس مقاله
Yufei Chen, Lin Zhang, and Ruiyang Zhao,
“Inter-AGV Scheduling and a Novel Multi-Agent Collaborative Protocol for Intra-AGV Resource Allocation in MEC-Enabled Multi-AGV Scenarios,”
IEEE Open Journal of the Communications Society, vol. 6, 2025, pp. 1425–1442.*
DOI: 10.1109/OJCOMS.2025.3456892



{kind=link}
بدون نظر