

مقدمه: انبارهای هوشمند، در مسیر انقلاب انرژیمحور
در قلب انبارهای خودکار امروزی، رباتهایی قرار دارند که بیوقفه در حال حرکت هستند؛ رباتهایی که بهدقت کالاها را از قفسههای متعدد انتخاب میکنند، آنها را با دقت بالا به ایستگاههای پردازش منتقل میکنند، و سپس بهسرعت بازمیگردند تا مأموریت بعدی را اجرا کنند. این رباتهای متحرک که تحت عنوان سیستم برداشت کالا مبتنی بر ربات (RMFS) شناخته میشوند، بهعنوان ستون فقرات لجستیک مدرن، نقش بیبدیلی در کاهش زمان آمادهسازی سفارشات و ارتقای بهرهوری ایفا میکنند.
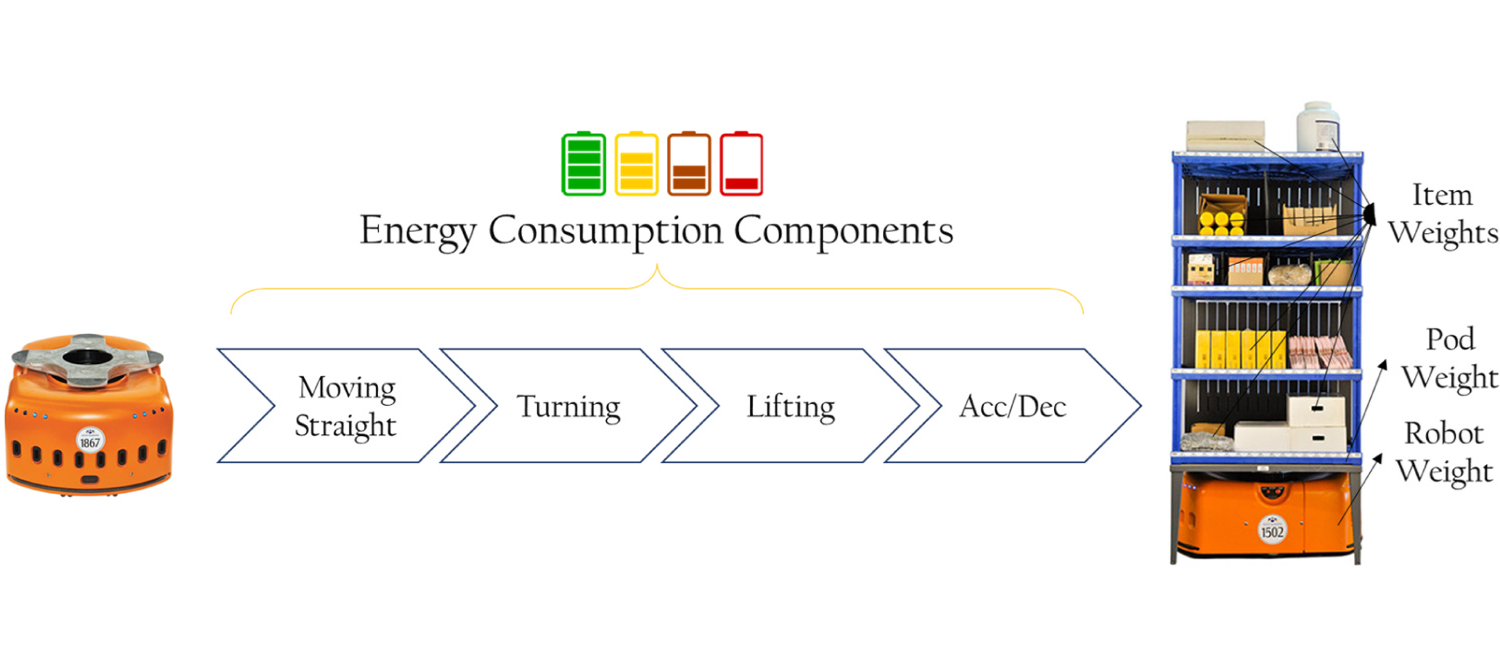
اما در پسِ این دقت و هماهنگی پیچیده، چالشی کلیدی در حال رشد است که میتواند عملکرد کل سیستم را تحت تأثیر قرار دهد: مدیریت مصرف انرژی.
رباتها برای انجام عملیات پیچیده خود، نیاز به حرکتهای مکرر، توقفهای بهموقع، مسیرهای بهینه و پردازشهای همزمان دارند. هر تصمیمی که در این زنجیره اتخاذ میشود—از تخصیص سفارش به ربات گرفته تا مسیر انتخابشده و زمانبندی اجرای مأموریت—مستقیماً بر میزان انرژی مصرفشده تأثیر میگذارد. این موضوع در مقیاسهای کوچک شاید قابل چشمپوشی باشد، اما در سیستمهای بزرگ که شامل صدها ربات و هزاران مأموریت روزانه هستند، بهراحتی میتواند منجر به افزایش هزینه، کاهش عمر تجهیزات و از همه مهمتر، ناپایداری عملکرد سیستم شود.
در گذشته، برای کنترل چنین چالشهایی از الگوریتمهای ساده یا قوانین سختگیرانه استفاده میشد—مدلهایی که برای محیطهای ایستا یا سناریوهای از پیش تعریفشده مناسب بودند. اما واقعیت انبارهای امروزی چیز دیگری است. این فضاها پویا هستند، رفتار مشتریان غیرقابل پیشبینی است، سفارشها بهشدت متغیرند، و فشار برای افزایش سرعت و کاهش مصرف انرژی بیش از هر زمان دیگری احساس میشود. بنابراین، دیگر نمیتوان از راهکارهای سنتی انتظار پاسخگویی داشت. در پاسخ به این نیاز، پژوهش پیشرو مدلی ترکیبی و نوآورانه ارائه داده است؛ مدلی که میکوشد همزمان چندین هدف را بهینهسازی کند، بدون آنکه یکی را فدای دیگری سازد. این مدل بر پایهی سه ستون اصلی بنا شده است:
شبیهسازی عاملمحور (Agent-Based Simulation): بهمنظور بازسازی رفتار واقعی رباتها، سفارشات و تعامل آنها در محیط انبار
مدلهای یادگیری ماشینی: برای درک الگوهای پنهان، پیشبینی کارایی و بهبود تصمیمگیری در شرایط پویا
الگوریتمهای تکاملی چندهدفه: برای یافتن بهترین تعادل میان مصرف انرژی، زمان اجرای مأموریت و تعادل بار میان رباتها
نتیجه این رویکرد، معماریای است که میتواند بهصورت هوشمندانه تصمیم بگیرد: چه رباتی چه مأموریتی را انجام دهد؛ در چه زمانی و از چه مسیری حرکت کند و چگونه منابع محدود انرژی را بهگونهای مدیریت کند که سیستم پایدار، سریع و کمهزینه باقی بماند. این راهکار، صرفاً یک مدل دانشگاهی نیست. آنچه در این مقاله ارائه شده، بنیانی عملی برای نسل بعدی انبارهای خودکار هوشمند است—انبارهایی که نهتنها میتوانند عملیات را انجام دهند، بلکه میتوانند با تحلیل مداوم داده، بهینهسازی بلادرنگ و پیشبینی نیازهای آینده، خود را بازتعریف کنند. انقلاب انرژیمحور در لجستیک آغاز شده، و مدلهای ترکیبی مانند آنچه در این پژوهش توسعه یافتهاند، میتوانند پیشگامان این مسیر باشند.
چالشهای کلیدی در مدیریت انرژی RMFS: لایههای پنهان پیچیدگی در قلب انبارهای رباتیکی
هرچه انبارها هوشمندتر و عملیات در آنها سریعتر میشود، مسئلهای ظریف اما بنیادین بیشازپیش خود را نشان میدهد: چگونه میتوان هم به سرعت پاسخگویی بالا دست یافت، هم مصرف انرژی را کنترل کرد، و هم پایداری سیستم را حفظ نمود؟ این سه هدف اگرچه در ظاهر همراستا بهنظر میرسند، اما در عمل اغلب در تضاد با یکدیگر قرار دارند. برای رسیدن به مدیریت بهینه در سامانههای برداشت کالا مبتنی بر ربات (RMFS)، چهار چالش اساسی باید بهدرستی شناسایی و حل شوند—چالشهایی که نهتنها از جنس محاسبات عددی، بلکه در سطح معماری تصمیمسازی و دینامیک محیط انبار رخ میدهند:
چالش اول: همزمانی متغیرها و تصمیمات چندعاملی
در یک سیستم RMFS، هیچ تصمیمی مستقل از سایر بخشها گرفته نمیشود. تخصیص یک مأموریت به یک ربات خاص، باید در هماهنگی کامل با وضعیت مسیرهای دیگر رباتها، وضعیت شارژ باتری، موقعیت فعلی سفارشات، ترافیک منطقهای، ظرفیت ایستگاههای تحویل و حتی آیندهنگری نسبت به سفارشهای بعدی انجام شود. این یعنی هر انتخاب کوچک، مجموعهای از پیامدهای چندلایه بهدنبال دارد. سیستمهایی که تنها با یک نگاه خطی یا الگوریتمهای ساده تخصیص و مسیریابی کار میکنند، قادر به درک و حل این پیچیدگی نیستند. بهینهسازی واقعی، نیازمند مدلی است که همهی این عوامل را بهصورت همزمان و تعاملی در تصمیمگیری دخیل کند و از رفتار موضعی عبور کرده، به عملکرد بهینهی کل سیستم برسد.
چالش دوم: تقابل انرژی و زمان بهعنوان دو معیار متضاد
یکی از واقعیتهای سختگیرانه در انبارهای رباتیکی، تعارض دائمی بین مصرف انرژی و سرعت پردازش سفارشات است. هر ربات برای انجام مأموریت سریعتر باید شتاب بیشتری بگیرد، توقفهای کمتری داشته باشد و اولویت مسیرهای کوتاهتر را لحاظ کند. اما تمام این اقدامات با افزایش مصرف انرژی، استهلاک سختافزاری، و کاهش طول عمر عملیاتی باتریها همراه هستند. از طرفی، اگر بخواهیم مصرف انرژی را کاهش دهیم و رباتها را با سرعت پایینتر، با مکثهای بلندتر یا مسیرهای کمترافیک هدایت کنیم، خروجی عملیاتی سیستم افت میکند و زمان تحویل سفارشات بالا میرود. این دو معیار، بهصورت طبیعی در تضادند. بنابراین، نیاز به مدلهایی وجود دارد که بتوانند در لحظه و متناسب با اولویت کسبوکار، تعادل پویایی میان انرژی و سرعت برقرار کنند. این تعادل نه با قانونهای ثابت، بلکه با تحلیل لحظهای و تصمیمگیری هوشمندانه ممکن است.
چالش سوم: محیطی پویا، سفارشهایی غیرقابل پیشبینی
انبارهای امروز دیگر ساختارهای ایستا نیستند. سفارشهای جدید در هر لحظه ثبت میشوند، اولویت کالاها تغییر میکند، مسیرها بسته یا شلوغ میشوند، و برخی رباتها ممکن است بهدلایل فنی غیرفعال شوند. در چنین محیطی، هیچگونه برنامهریزی از پیشنوشتهشدهای نمیتواند پاسخگو باشد. سیستمی که قرار است بهینه کار کند، باید بتواند نهفقط به تغییرات واکنش نشان دهد، بلکه بهصورت بلادرنگ ساختار تصمیمگیری خود را بازتنظیم کند. این به یعنی درک تغییرات، یادگیری از رفتار گذشته، و تطبیق سیاستهای جاری با دادههای لحظهای هست. در این چالش، تنها مدلهایی که توانایی تحلیل دادههای زنده، شبیهسازی پاسخ محیط و بازآموزی سریع خود را دارند، میتوانند ماندگار و مؤثر باقی بمانند.
چالش چهارم: محدودیت راهحلهای تکمعیاره در مواجهه با واقعیت چندهدفه
مسئله RMFS، بههیچوجه یک مسئله تکمعیاره نیست. تخصیص مأموریتها باید به گونهای انجام شود که نهتنها زمان تحویل سفارش به حداقل برسد، بلکه انرژی مصرفی کاهش یابد، بار کاری بین رباتها متعادل بماند، ازدحام مسیرها به حداقل برسد و از همه مهمتر، پایداری تصمیمات در طول زمان حفظ شود. اکثر مدلهای موجود صرفاً یکی از این معیارها را هدف قرار میدهند—مثلاً کوتاهترین مسیر یا کمترین انرژی مصرفی. اما این رویکرد، در عمل منجر به اختلال در سایر بخشها شده و نتیجهی کلی عملکرد را تضعیف میکند. بهینهسازی واقعی باید چندمعیاره، تطبیقپذیر، و حساس به شرایط عملیاتی انبار باشد؛ مدلی که بتواند میان تضادها، نقطهی تعادلی هوشمندانه بیابد و به اهداف مختلف بهطور همزمان پاسخ دهد.
معماری پیشنهادی: ترکیب هوشمندانه شبیهسازی، یادگیری و بهینهسازی برای تصمیمسازی انرژیکار در RMFS
برای پاسخ دادن به چالشهای پیچیده و درهمتنیدهی مدیریت انرژی در سیستمهای برداشت رباتیکی، مقاله حاضر بهجای اتکا به یک الگوریتم منفرد یا رویکرد خطی، یک معماری سهلایهی ترکیبی، پویا و دادهمحور پیشنهاد داده است؛ مدلی که در آن شبیهسازی دقیق، پیشبینی هوشمند و بهینهسازی چندهدفه در کنار یکدیگر عمل میکنند تا تصمیمگیری بلادرنگ و پربازده ممکن شود. در این ساختار، هر لایه نقش خاصی در چرخه تصمیمسازی ایفا میکند، اما همزمان بهشکل ارگانیک با سایر لایهها در تعامل است—درست مانند مغز انسان که حس، تحلیل و انتخاب را بهطور همزمان و پیوسته انجام میدهد. این سه لایه بهترتیب عبارتاند از:
لایه نخست: شبیهسازی عاملمحور – مدلسازی رفتاری واقعگرایانه برای شناخت دقیق محیط
پایهی هر تصمیم هوشمند، درک عمیق از وضعیت محیط و بازیگران آن است. در همین راستا، نخستین لایهی این معماری به شبیهسازی عاملمحور اختصاص یافته است؛ بستری که در آن انبار، رباتها، مسیرها، سفارشها، و ایستگاهها با دقت بالا مدلسازی شدهاند تا بتوان تأثیر تصمیمات مختلف را در فضایی شبهواقعی بررسی کرد. در این محیط شبیهسازی:
هر ربات یک «عامل مستقل» است که ویژگیها، محدودیتها و رفتار خاص خود را دارد.
مسیرهای حرکتی، نقاط برخورد، تراکم ترافیکی، صف انتظار، و مناطق اولویتدار همگی در نظر گرفته شدهاند.
رویدادهای واقعی مانند ورود ناگهانی سفارش جدید، اختلال در حرکت، یا کاهش انرژی باتری نیز قابلیت بازسازی دارند.
این لایه در واقع نقش یک “آزمایشگاه دیجیتال” را دارد—جایی که میتوان بدون هزینه و ریسک، صدها سناریو را اجرا کرد و خروجی آنها را برای آموزش و تحلیل در اختیار مدلهای بعدی گذاشت.
لایه دوم: یادگیری ماشینی – پیشبینی بلادرنگ پیامدهای هر تصمیم
با دادههای حاصل از شبیهسازی، سیستم وارد فاز تحلیل میشود. در این مرحله، دادههای ساختاریافتهای از عملکرد رباتها، ویژگیهای مأموریت، میزان انرژی مصرفشده، زمان اجرای سفارش، بارکاری و ازدحام مسیرها در اختیار ماژول یادگیری ماشین قرار میگیرند. در این لایه، مدلهای یادگیری (مانند رگرسیون یا درخت تصمیم) آموزش میبینند تا بتوانند رابطهی میان ویژگیهای ورودی مأموریت (چه کسی، چهکاری، از کجا، با چه مسیر) و خروجیهای عملکردی (چقدر انرژی، چقدر زمان، چقدر ترافیک) را کشف کنند. این یادگیری دو مزیت اصلی دارد:
پیشبینی سریع عملکرد بدون نیاز به شبیهسازی مجدد: یعنی اگر بخواهیم ببینیم که تخصیص سفارش A به ربات ۳ با مسیر X چقدر انرژی مصرف میکند و چقدر طول میکشد، مدل در لحظه میتواند پاسخ بدهد.
ایجاد بستری برای ارزیابی هزاران تصمیم بالقوه: چون دیگر لازم نیست برای هر تصمیم، آن را اجرا کنیم. بلکه با مدل ML، میتوان خروجی هر تصمیم را تخمین زد و آن را به الگوریتم بهینهسازی سپرد.
بهبیان دیگر، لایه یادگیری ماشینی نقش مغز تحلیلگر سیستم را ایفا میکند—جایی که تجربهها ذخیره میشوند، الگوها کشف میشوند و پیشبینیهای آینده با دقت بالا ممکن میشود.
لایه سوم: بهینهسازی چندهدفه – یافتن تعادل در دنیایی از تضادها
زمانی که سیستم بتواند پیامد هر تصمیم را پیشبینی کند، میتواند وارد فاز انتخاب شود؛ انتخاب از میان میلیونها امکان. در اینجاست که لایه سوم وارد عمل میشود: ماژول بهینهسازی چندهدفه که با استفاده از الگوریتمهای تکاملی مانند NSGA-II، راهحلهایی را انتخاب میکند که بهترین تعادل را بین اهداف گوناگون برقرار میکنند. این اهداف شامل مواردی همچون : کمینهسازی مصرف انرژی، کاهش زمان انجام مأموریتها، کاهش ترافیک در مسیرهای کلیدی و توزیع یکنواخت بار کاری بین رباتها میشود. با تعریف یک جمعیت اولیه از تصمیمات ممکن (ترکیبهایی از اینکه کدام ربات، کدام سفارش را از چه مسیری انجام دهد)، الگوریتم با استفاده از مدل یادگیری، عملکرد هر تصمیم را ارزیابی میکند و در چرخههای متوالی با ترکیب، انتخاب و جهش، به مجموعهای از تصمیمات پارتو-بهینه (Pareto-Optimal) میرسد—یعنی تصمیماتی که هیچکدام بر دیگری بهطور مطلق برتری ندارند، بلکه بسته به اولویت عملیاتی میتوانند انتخاب شوند. در نهایت، خروجی این لایه نه یک پاسخ منفرد، بلکه مجموعهای از پاسخهای متعادل و هوشمندانه است که مدیر سیستم یا خود سیستم میتواند بهترین را بر اساس شرایط جاری برگزیند.
همافزایی میان سه لایه: یک حلقه یادگیرنده و خودتصحیحگر
نقطه قوت واقعی این معماری، نه در قدرت هر لایه بهتنهایی، بلکه در تعامل پویا و پیوستهی آنهاست. شبیهساز داده تولید میکند → مدل یادگیرنده روی دادهها آموزش میبیند → بهینهساز از مدل برای انتخاب بهترین تصمیم استفاده میکند → تصمیمات به شبیهساز بازگردانده میشوند و حلقه ادامه مییابد. این ساختار چرخهای موجب میشود که سیستم: با گذر زمان بهتر شود؛ با هر سناریوی جدید، دقتش بالاتر رود و با هر تصمیم، یاد بگیرد چگونه تصمیمهای آینده را بهتر بگیرد. در یک جمله، این مدل نهفقط تصمیمگیرنده است، بلکه خود-یادگیر و آیندهنگر نیز هست—ویژگیای که آن را برای صنعت انبارداری رباتیکی مدرن، بهعنوان یک راهحل نسل بعدی معرفی میکند.
آزمون در میدان واقعیت: اجرای مدل ترکیبی در محیط شبیهسازیشده صنعتی
یک مدل زمانی ارزش واقعی خود را نشان میدهد که در یک محیط پیچیده، واقعینما و چندعاملی آزمایش شود و بتواند در برابر فشار متغیرهای واقعی، عملکردی باثبات و کارآمد ارائه دهد. نویسندگان این پژوهش، معماری پیشنهادی را در یک بستر شبیهسازی صنعتی کامل پیادهسازی کردهاند؛ بستری که بهگونهای طراحی شده تا همه ویژگیهای کلیدی یک انبار رباتیکی واقعی را بازتاب دهد.
۱. طراحی محیط شبیهسازی: بازسازی واقعگرایانه از انبارهای رباتیکی
برای ارزیابی مدل پیشنهادی در شرایطی نزدیک به دنیای واقعی، ابتدا یک محیط شبیهسازی دقیق، منعطف و دینامیک طراحی شد. در این محیط، تلاش شد تا همه مؤلفههای کلیدی یک سیستم RMFS (سیستم برداشت کالا مبتنی بر ربات) از ساختار فیزیکی انبار گرفته تا منطق رفتار رباتها بازآفرینی شوند. ساختار فیزیکی شبیهساز شامل موارد زیر بود:
۶۰ قفسه (shelves) که بهصورت پراکنده در سراسر فضای انبار قرار گرفته بودند
۲۰ ایستگاه کاری (workstations) برای دریافت یا ارسال کالا
شبکهای از راهروهای افقی و عمودی که امکان ایجاد گلوگاه، برخورد و ترافیک را فراهم میکرد
و ۱۰ ربات متحرک با مشخصات عملیاتی مشخص از جمله ظرفیت باتری، سرعت، قوانین توقف و شتاب
این محیط نهتنها ایستا نبود، بلکه پویا طراحی شده بود تا سناریوهای واقعی مانند:ورود لحظهای و نامنظم سفارشها، افت ناگهانی انرژی باتری برخی رباتها، مسدود شدن مسیرهای خاص به دلیل ترافیک و تغییرات اولویت کالاها را بتوان در آن بهصورت زمانبندیشده یا تصادفی اعمال کرد. با چنین طراحی، سیستم پیشنهادی در معرض فشارهای واقعی قرار گرفت و قابلیت تصمیمگیری در شرایط ناپایدار و چالشی بهدرستی مورد ارزیابی قرار گرفت.
۲. سناریوهای آزمون و شاخصهای کلیدی عملکرد
برای ارزیابی عینی کیفیت عملکرد مدل ترکیبی، مجموعهای از سناریوهای تست طراحی شد تا مدل در شرایط مختلف عملیاتی قرار گیرد و میزان تطبیقپذیری، بهرهوری و پایداری آن سنجیده شود. سه سناریوی اصلی که در این آزمایش تعریف شدند عبارت بودند از:
بار نرمال: سناریوی پایهای که در آن حجم سفارشها، نرخ ورود، ترافیک مسیر و فعالیت رباتها در شرایط نرمال بودند.
ترافیک سنگین: با اعمال همزمان چندین سفارش فوری، مسدود کردن برخی مسیرها و کاهش سرعت بخشی از رباتها، شرایط پرتراکم برای تصمیمگیری ایجاد شد.
شرایط بحرانی: شبیهسازی بحرانهایی مانند کاهش سطح باتری اکثر رباتها، افزایش ناگهانی بارگیریها و تغییر اولویت سفارشات.
برای سنجش عملکرد مدل در این سناریوها، پنج شاخص کلیدی در نظر گرفته شد:میانگین انرژی مصرفشده توسط رباتها در هر مأموریت، میانگین زمان تکمیل هر سفارش از لحظه ورود تا تحویل نهایی، نرخ درگیری (utilization rate) رباتها در هر لحظه، درجه تعادل بار کاری میان رباتهای مختلف (load balancing)، تعداد توقفها، گلوگاهها و موقعیتهای با ازدحام بالا، این شاخصها بهگونهای انتخاب شدند که ابعاد مختلف بهرهوری، انرژیکاری، کارایی عملیاتی و مدیریت منابع را بهصورت جامع منعکس کنند.
۳. نتایج آزمایشها: پیروزی مدل ترکیبی در میدان عمل
نتایج اجرای مدل ترکیبی در محیط شبیهسازیشده نشان داد که این معماری در شرایط مختلف، عملکردی پایدارتر، سریعتر و کممصرفتر نسبت به روشهای سنتی دارد. مدل با چند الگوریتم مرجع مقایسه شد—از جمله الگوریتم تخصیص ایستا (Static Rule) و الگوریتم بدون یادگیری. خروجیها نشان دادند که مدل پیشنهادی در همه شاخصها پیشرو است.
در زمینه مصرف انرژی: مدل توانست میانگین مصرف انرژی را تا ۱۸.۴٪ نسبت به حالت مرجع کاهش دهد. این کاهش چشمگیر، نتیجه انتخابهای هوشمندانه در تخصیص مسیرها، جلوگیری از ترافیک، و زمانبندی مأموریتها بود.
در زمان پاسخ به سفارشها: در سناریوهای پرترافیک، مدتزمان انجام سفارشها تا ۲۲٪ کاهش پیدا کرد، چراکه مدل قادر بود رباتهای در موقعیت بهینه را بهسرعت تشخیص دهد و تنگناها را دور بزند.
در توزیع بار کاری: مدل باعث شد استفاده از رباتها یکنواختتر و پایدارتر شود، بهطوریکه از فشار کاری شدید روی یک ربات و بیکاری رباتهای دیگر جلوگیری شد.
در کنترل ازدحام و برخوردها: با پیشبینی رفتار ترافیکی مسیرها و تخصیص بهینه، تعداد توقفهای ناخواسته و برخوردهای مسیر به شکل محسوسی کاهش یافت.
این نتایج نشان داد که مدل ترکیبی نهتنها میتواند بهینه تصمیمگیری کند، بلکه در شرایط چالشی نیز دچار افت عملکرد نمیشود.
۴.قابلیت تعمیم به محیطهای واقعی و صنایع متنوع
یکی از مزایای راهبردی مدل ارائهشده در این پژوهش، قابلیت بالای تعمیمپذیری آن به سایر محیطها و صنایع مرتبط با لجستیک هوشمند است. این مدل بهگونهای طراحی شده که نهتنها در یک محیط خاص کار میکند، بلکه میتواند بهراحتی در انبارهایی با ویژگیهای متفاوت، مقیاس بزرگتر یا حتی ساختار فیزیکی پیچیدهتر پیادهسازی شود. برخی از ویژگیهای کلیدی برای تعمیمپذیری عبارتاند از:
معماری ماژولار: هر لایه (شبیهسازی، یادگیری، بهینهسازی) بهصورت مستقل و قابل جایگزینی طراحی شده است، بهطوریکه میتوان از دادههای واقعی، الگوریتمهای جایگزین یا مدلهای ML متفاوت استفاده کرد.
عدم وابستگی به سختافزار خاص: این مدل وابسته به برند یا نوع خاصی از رباتها نیست. فقط لازم است ویژگیهای رباتها در محیط شبیهسازی تعریف شوند.
سازگاری با اهداف عملیاتی مختلف: بسته به استراتژی کسبوکار، میتوان وزن هر هدف (مثلاً انرژی، سرعت، تعادل بار) را تغییر داد و مدل همچنان خروجیهای بهینه ارائه خواهد داد.
بههمین دلیل، این معماری میتواند پایهای برای طراحی سیستمهای تصمیمگیر در انبارهای صنعتی واقعی، مراکز توزیع بزرگ، و پلتفرمهای تحویل سریع باشد.
مزایای کلیدی مدل پیشنهادی: وقتی سیستم، خودش یاد میگیرد بهتر تصمیم بگیرد
در بسیاری از سامانههای مدیریت انبار رباتیکی، همچنان از الگوریتمها و منطقهایی استفاده میشود که مبتنی بر قواعد ساده و ثابت هستند. این رویکردها شاید در گذشته پاسخگو بودند، اما در دنیای امروز که پویایی، مقیاسپذیری و تنوع تقاضاها از ویژگیهای ذاتی لجستیک مدرن است، دیگر کارآمد نیستند. مدیریت یک سیستم RMFS واقعی، نیازمند تصمیمسازیهای لحظهای، مبتنی بر داده، چندهدفه و تطبیقپذیر است—ویژگیهایی که در الگوریتمهای ایستا دیده نمیشوند. مدل پیشنهادی این مقاله، با بهرهگیری از معماری سهلایه شامل شبیهسازی عاملمحور، یادگیری ماشین و بهینهسازی چندهدفه، یک ساختار نوین و منعطف را معرفی میکند که نهتنها تصمیمگیر است، بلکه به مرور زمان از رفتار خودش یاد میگیرد و بهتر میشود. در ادامه، پنج مزیت کلیدی این مدل در مقایسه با روشهای سنتی بررسی میشود:
۱. تصمیمگیری بر اساس تحلیل بلادرنگ، نه قواعد از پیش تعیینشده
در روشهای سنتی مدیریت رباتهای انبار، تصمیمگیریها معمولاً بر اساس قوانین ثابت و از پیش تعریفشده انجام میشود—مثل: “ربات نزدیکتر همیشه انتخاب شود”، “همیشه از کوتاهترین مسیر استفاده شود”، یا “سفارشها به ترتیب ورود پردازش شوند.” این قوانین شاید در شرایط ساده جواب بدهند، اما بهمحض آنکه شرایط عملیاتی پیچیده، متغیر یا پویا شوند (مثلاً ترافیک مسیرها، افت باتری یا افزایش ناگهانی سفارشها)، بلافاصله ناکارآمد میشوند و سیستم از کنترل خارج میشود. در مقابل، مدل پیشنهادی مقاله بر پایهی تحلیل بلادرنگ دادهها و وضعیت لحظهای محیط عمل میکند. بهجای تکیه بر یک منطق ساده و سخت، این مدل در هر لحظه:
اطلاعات محیط، وضعیت رباتها و سفارشها را جمعآوری میکند
پیامدهای هر تصمیم احتمالی (مثل تخصیص ربات یا مسیر) را پیشبینی میکند
و از میان آنها، گزینهای را انتخاب میکند که بهینهترین خروجی را در زمان، انرژی و تعادل ایجاد میکند
این یعنی تصمیمگیری دیگر خطی و خشک نیست، بلکه پویا، منعطف، و متناسب با موقعیت آنی سیستم است. به همین دلیل، این مدل در برابر تغییرات ناگهانی یا اختلالات، دچار فروپاشی عملکرد نمیشود؛ بلکه بهصورت هوشمند، پاسخ خود را تطبیق میدهد.
۲. یادگیری مداوم و خودتصحیحی: مدلی که هوشمندتر میشود
یکی از محدودیتهای رایج در سیستمهای سنتی، این است که کیفیت تصمیمگیری آنها با گذر زمان تغییر نمیکند مگر اینکه اپراتور انسانی آن را مجدداً برنامهریزی کند یا پارامترها را بهروزرسانی نماید. این یعنی سیستم، «ثابت» باقی میماند—حتی اگر دادههای عملیاتیاش تغییر کنند. در مقابل، مدل پیشنهادی به کمک ماژول یادگیری ماشین تعبیهشده، ساختاری دارد که میتواند بهصورت مستمر:
دادههای جاری از عملکرد سیستم (مانند انرژی مصرفی، زمان مأموریت، ترافیک مسیرها و…) را جمعآوری کند
رفتار سیستم را تحلیل کرده و الگوهای پنهان را کشف کند
و سپس مدل تصمیمگیری خود را بهروزرسانی کند تا در مواجهه با سناریوهای مشابه، بهینهتر و دقیقتر عمل نماید
به این ترتیب، مدل بهنوعی «از خودش یاد میگیرد». مثلاً اگر در چند نوبت، اختصاص یک سفارش به ربات خاص باعث ایجاد ترافیک یا تأخیر شده باشد، سیستم این رفتار را تشخیص میدهد و در آینده از تکرار آن اجتناب میکند. این ویژگی نهفقط کارایی را در طول زمان افزایش میدهد، بلکه باعث میشود مدل نسبت به تغییرات محیطی و رفتاری، هوشمندانه انطباق پیدا کند. چنین ساختاری، پایهای برای توسعه سیستمهای پیشبینیگر و حتی خودتصمیمگیر در آینده خواهد بود.
۳. بهینهسازی چندهدفه: تصمیمهایی متعادل، نه یکبعدی
یکی از مهمترین برتریهای مدل پیشنهادی نسبت به بسیاری از الگوریتمهای سنتی، توانایی آن در بهینهسازی همزمان چندین هدف متضاد است. مدلهای مرسوم اغلب تنها یک معیار را هدف قرار میدهند—مثلاً کمترین زمان، کمترین مسافت، یا کمترین مصرف انرژی. اما در دنیای واقعی، سیستم RMFS با مجموعهای از اهداف درهمتنیده: کمینهسازی مصرف انرژی، کاهش زمان اجرای سفارشها، کاهش ترافیک و توقفهای مسیر، تعادل بار کاری بین رباتها، جلوگیری از فرسایش یا شارژ بیشازحد باتریها سروکار دارد. این اهداف نهتنها با هم متفاوتاند، بلکه اغلب با یکدیگر در تضاد هستند. بهعنوان مثال، سریعترین تصمیم لزوماً کممصرفترین نیست. اما مدل پیشنهادی با استفاده از الگوریتمهای تکاملی چندهدفه (مثل NSGA-II)، برای هر سناریو، مجموعهای از راهحلهای متعادل (جبهه پارتو) تولید میکند که هرکدام بر اساس وزندهی دلخواه، قابل انتخاب هستند. به این معنا که سیستم میتواند بنا به نیاز لحظهای (مثلاً کاهش فوری انرژی یا پاسخگویی سریع به یک سفارش خاص)، خودش اولویتها را بازتنظیم کند و از میان گزینههای تعادلی، بهترین را انتخاب نماید. این توانمندی، گامی مهم از تصمیمسازی تکمعیاره به تصمیمسازی استراتژیک چندبعدی است.
۴. مقیاسپذیری و سازگاری با انبارهای گوناگون
مزیت دیگر مدل پیشنهادی، قابلیت پیادهسازی آن در محیطهای گوناگون با مقیاس و پیچیدگیهای متفاوت است. بسیاری از الگوریتمهای مرسوم، برای یک نوع خاص از انبار یا تعداد مشخصی از رباتها طراحی شدهاند و با کوچکترین تغییر در ساختار فیزیکی یا حجم سفارشات، نیاز به بازطراحی یا تنظیم مجدد دارند. اما در این مدل، بهدلیل معماری ماژولار و جداشدنی، اجزای مختلف سیستم (شبیهسازی، یادگیری، بهینهسازی) میتوانند:بهراحتی برای انبارهای کوچک یا بزرگ مقیاسبندی شوند؛ به انواع مختلف رباتها با ویژگیهای متفاوت تطبیق پیدا کنند؛ یا حتی در سایر صنایع مبتنی بر لجستیک و حملونقل داخلی بهکار گرفته شوند. این قابلیت، به سازمانها این امکان را میدهد که مدل را: یا بهصورت تدریجی و بخشبهبخش در سیستم خود وارد کنند؛ یا حتی در چند بخش انبار با اهداف مختلف، سیاستهای متفاوتی اجرا کنند. در واقع، این سیستم بهجای یک «راهحل یکشکل»، یک بستر انعطافپذیر برای طراحی راهحلهای متناسب با محیط عملیاتی واقعی فراهم میکند.
۵. کاهش هزینه و افزایش بازگشت سرمایه: عملکرد بهتر با هزینه کمتر
در نهایت، تمام مزایای فنی این مدل باید به یک نتیجه تجاری ملموس ختم شوند—و این دقیقاً همانجاست که مدل پیشنهادی میدرخشد. ترکیب بهینهسازی انرژی، کاهش زمان اجرا، استفاده هوشمندانه از منابع، جلوگیری از فرسایش بیمورد تجهیزات، و حذف تصمیمات اشتباه یا تکراری، بهصورت مستقیم باعث کاهش هزینههای عملیاتی میشود. از سوی دیگر: استفاده کاملتر از رباتها، کاهش زمان بیکاری، افزایش ظرفیت پاسخگویی به سفارشها و کاهش خطای انسانی همگی باعث میشوند سرعت گردش موجودی، رضایت مشتری و بهرهوری سیستم افزایش یابد. در مجموع، این معماری با ایجاد تعادل بین کارایی و صرفهجویی، به یک ابزار قابل اتکا برای مدیران صنعتی تبدیل میشود که نهفقط عملکرد سیستم را بهبود میدهد، بلکه هزینه را کنترل و بازگشت سرمایه را تضمین میکند.
مسیرهای آینده: گامهایی فراتر از الگوریتم، بهسوی زیرساختهای هوشمند و خودآموز
مدلی که در این مقاله معرفی شده، نهفقط یک نوآوری الگوریتمی است، بلکه یک الگوی زیربنایی برای شکلدهی آیندهی انبارداری و لجستیک هوشمند بهشمار میرود. اگرچه معماری سهلایهای ارائهشده توانسته عملکرد چشمگیری در محیط شبیهسازیشده به نمایش بگذارد، اما ظرفیتهای توسعهی آن بهمراتب فراتر میرود. این معماری قابلیت آن را دارد که بهتدریج، پایهگذار اکوسیستمهای دیجیتال خودتصمیمگیر در صنعت شود. در این بخش، پنج مسیر کلیدی توسعه مدل مطرح میشوند؛ مسیرهایی که از اتصال به فناوریهای نوظهور گرفته تا پیادهسازی در مقیاسهای بزرگتر را پوشش میدهند—و هرکدام میتوانند این مدل را به یک راهحل صنعتی تمامعیار تبدیل کنند.
۱. تلفیق با اینترنت اشیا (IoT): از دادههای ساده به بینشهای بلادرنگ
یکی از قدرتمندترین مسیرهای توسعه این مدل، اتصال آن به زیرساختهای اینترنت اشیا (IoT) و تبدیل آن به یک سیستم تصمیمگیر بلادرنگ است. در شرایط فعلی، ورودیهای مدل از دادههای شبیهسازی یا تاریخی بهدست میآیند، اما اگر بتوان این دادهها را مستقیماً از محیط فیزیکی جمعآوری کرد، قدرت سیستم بهطرز چشمگیری افزایش مییابد. تصور کنید هر ربات به حسگرهای هوشمند مجهز باشد که در لحظه: موقعیت مکانی دقیق، سرعت، و سطح باتری را گزارش دهد؛ فشار بر چرخها، دمای باتری، یا استهلاک قطعات را پایش کند؛ اطلاعات ترافیکی مسیرها یا ایستگاههای پررفتوآمد را ارسال نماید. از سوی دیگر، قفسهها، ایستگاهها، و کالاها نیز با تگهای RFID یا حسگرهای محیطی به مدل متصل شوند. در این حالت، مدل به یک «مغز مرکزی» متصل به هزاران چشم و گوش در انبار تبدیل میشود. نتیجه؟ یک سیستم عصبی دیجیتال که قادر است در هر لحظه تصمیمگیری کند، خطاها را پیشبینی نماید، و حتی قبل از بروز اختلال، مسیر خود را اصلاح کند. این ادغام با IoT، پلی است بهسوی انبارهای خودآگاه و خودمدیر آینده.
۲. ارتقا با یادگیری عمیق و یادگیری تقویتی: از پیشبینی تا سیاستسازی خودکار
مدل فعلی برای حفظ سرعت و سادگی، از الگوریتمهای یادگیری نسبتاً سبک مانند درخت تصمیم یا رگرسیون استفاده کرده است. اما با گسترش زیرساخت محاسباتی یا انتقال سیستم به سرورهای صنعتی (مانند edge computing)، میتوان از یادگیری عمیق (Deep Learning) و یادگیری تقویتی (Reinforcement Learning) بهره گرفت تا کیفیت تصمیمات و دامنه یادگیری بهمراتب بالاتر رود. در یادگیری عمیق، سیستم میتواند الگوهای پیچیدهتری ازجمله: رفتار رباتها در ترافیکهای سنگین، تأثیر ویژگیهای محیطی بر مصرف انرژی، یا روابط پنهان بین سفارشات فوری و گلوگاهها را در دادهها تشخیص دهد. در یادگیری تقویتی، سیستم بهجای صرفاً پیشبینی پیامد یک تصمیم، سیاستهایی را میآموزد که در بلندمدت پاداش بیشتری ایجاد میکنند. یعنی نه فقط “الان کدام تصمیم خوب است؟” بلکه “چگونه تصمیمگیری کنم که در طول زمان، بهترین نتایج را بگیرم؟” این رویکرد بهویژه برای انبارهای دینامیک و غیرقابل پیشبینی ایدهآل است—جایی که سیستم باید با آزمون و خطا خودش را تنظیم کند. در نتیجه، مدل نهفقط یادگیر میشود، بلکه هوشمند، تطبیقپذیر و پیشبیننده خواهد بود—با سیاستسازی خودکار و بینیاز از بازبرنامهریزی دستی.
۳. توسعه به شبکههای چندانباره: از انبار هوشمند تا زنجیره تأمین هوشمند
در دنیای امروز، انبارها بهصورت منفرد عمل نمیکنند. بسیاری از کسبوکارها دارای چندین مرکز توزیع، انبار منطقهای یا واحدهای لجستیکی موازی هستند. مدل ارائهشده با کمی توسعه میتواند بهجای یک انبار، یک شبکه هوشمند چندانباره را مدیریت کند. برای این منظور، مدل باید قادر باشد: دادههای عملکردی از چند انبار را بهصورت همزمان دریافت و تحلیل کند، موجودیها، رباتها، سفارشات و ظرفیت هر انبار را با یکدیگر مقایسه و هماهنگ نماید و تصمیمگیری کند که کدام سفارش از کدام انبار انجام شود تا هزینه، زمان یا انرژی کل شبکه بهینه گردد. در این حالت، تصمیمسازی به سطح بالاتری ارتقا پیدا میکند: از مدیریت منابع محلی، به بهینهسازی استراتژیک زنجیرهای.
در قدم بعد، حتی میتوان این مدل را به سیستمهای حملونقل متصل کرد و مدیریت بارگیری کامیونها، تخصیص مسیرهای بینشهری یا حتی لجستیک معکوس را نیز در نظر گرفت. چنین سیستمی، بستر شکلگیری یک شبکه لجستیکی هوشمند، منعطف، و مستقل از مداخله انسانی خواهد بود—گامی واقعی بهسوی انقلاب صنعتی چهارم.
۴. پیادهسازی در محیط واقعی: گذار از نظریه به اثبات عملی
اگرچه مدل ارائهشده در این مقاله در محیطهای شبیهسازیشده صنعتی آزمایش شده و نتایج درخشانی داشته، اما گام منطقی بعدی، پیادهسازی آن در محیط واقعی انبار است. این گام، نهتنها ارزش علمی مدل را بهطور کامل اثبات میکند، بلکه میتواند آغاز تجاریسازی آن نیز باشد. پیادهسازی در یک انبار عملیاتی واقعی شامل: یکپارچهسازی با رباتهای موجود، اتصال به حسگرها، دوربینها یا تجهیزات زیرساختی و تطبیق مدل یادگیری با دادههای واقعی انبار خواهد بود. از طریق اجرای آزمایشی (Pilot Deployment)، میتوان: بازده عملیاتی را پیش و پس از استفاده از مدل مقایسه کرد؛ مشکلات احتمالی در اجرا را شناسایی و رفع کرد و راه را برای گسترش سیستم به سایر واحدهای سازمان هموار نمود. در عمل، این پیادهسازی میتواند نخستین نمونه موفق انبار تمامهوشمند خودتصمیمگیر در سطح صنعتی باشد که الگوریتم، بهصورت پیوسته در حال آموختن، تصمیمگیری و بهینهسازی است.
۵. اتصال به سیستمهای سطح بالا (MES/ERP): هماهنگی استراتژی و عملیات
در هر سازمان صنعتی، تصمیمهای سطح بالا (مثل تخصیص بودجه، اهداف تولید، اولویت سفارشات) از طریق سیستمهای مدیریت تولید (MES) و مدیریت منابع سازمانی (ERP) کنترل میشوند. برای اینکه مدل ارائهشده به حداکثر اثربخشی خود برسد، باید به این سامانهها متصل شود. از طریق این اتصال، مدل میتواند:
خروجیهای تصمیمگیری ERP (مثلاً: افزایش اولویت یک دسته کالا) را دریافت کند
و بهصورت هوشمند آن را به سطح عملیاتی رباتها، مسیرها و زمانبندی ترجمه نماید
برعکس، مدل نیز میتواند شاخصهای عملکردی لحظهای (KPIها) از انبار را به ERP گزارش دهد، و به مدیران سطح بالا اطلاعات دقیقتری برای تصمیمسازیهای کلان ارائه کند. این ترکیب، موجب ایجاد یک اکوسیستم دیجیتال هماهنگ از بالا تا پایین میشود که در آن، استراتژی با اجرا کاملاً هماهنگ است، و تمام واحدهای سازمان بر اساس دادهها و تحلیلهای بلادرنگ عمل میکنند.
جمعبندی نهایی: از الگوریتم تا تحول صنعتی
در جهانی که سرعت پاسخگویی، بهرهوری منابع، و توان انطباق با نوسانات بازار، کلید بقا و رشد سازمانهاست، دیگر نمیتوان با الگوریتمهای ایستا و مدلهای تصمیمگیری دستی، انتظار عملکرد رقابتی داشت. مدل ترکیبی ارائهشده در این پژوهش، نهفقط پاسخی به یک مسئله خاص در مدیریت رباتهای انبار است، بلکه نمونهای از نسل جدید سیستمهای تصمیمیار در صنعت هوشمند بهشمار میرود. با تلفیق شبیهسازی واقعگرایانه، یادگیری مداوم از دادهها، و بهینهسازی چندهدفه، این مدل توانسته است نشان دهد که: تصمیمسازی میتواند تطبیقپذیر، یادگیرنده و مقیاسپذیر باشد، صرفهجویی در انرژی، زمان و منابع انسانی همزمان ممکن است و مهمتر از همه، سیستم میتواند بدون وابستگی مداوم به انسان، از تجربیات خود بیاموزد و عملکردش را بهبود دهد. در فضای آزمایششده، مدل موفق شده تا مصرف انرژی را کاهش دهد، زمان اجرای مأموریتها را کوتاه کند، و از ایجاد گلوگاهها و رفتارهای غیر بهینه جلوگیری کند. اینها فقط اعداد نیستند، بلکه گواهی بر این است که زیرساختهای تصمیمساز هوشمند دیگر در آینده نیستند—بلکه همین امروز قابل اجرا هستند.
آینده با ما آغاز میشود: اگر به فکر تحول هستید، این آغاز مسیر است
اگر شما صاحب یک انبار بزرگ هستید، یا در حال طراحی زنجیره تأمین آینده شرکت خود، یا حتی اگر در بخش لجستیک و عملیات صنعتی فعالیت میکنید، این معماری میتواند:
راهکاری منعطف برای حل مشکلات امروز شما باشد
و بستری قدرتمند برای ساخت زیرساخت هوشمند آیندهتان فراهم کند
ما در کنار شما هستیم تا:
این مدل را با نیازهای خاص شما تطبیق دهیم
دادههای فعلی شما را تحلیل کنیم و از آنها یک سیستم یادگیرنده بسازیم
و به شما کمک کنیم تا در کمتر از آنچه تصور میکنید، انبارتان را هوشمند، خودکار و تصمیمیار کنید
گام بعدی با شماست…
فناوری آماده است، ابزارها در دسترساند، و مدلها به بلوغ رسیدهاند. تنها چیزی که باقیست، تصمیم جسورانه برای حرکت است. تصمیمی که از یک انبار شروع میشود، اما میتواند زنجیرهای از تحول را در کل سازمانتان رقم بزند.📞 با ما تماس بگیرید، یا مشاوره اختصاصی رایگان برای هوشمندسازی انبار خود را دریافت کنید. بیایید انبارتان را به قلب تپندهی آیندهی صنعت تبدیل کنیم.



{kind=link}
بدون نظر