

تحول دیجیتال در صنایع تولیدی و لجستیک، تحت عنوان Industry 4.0، بهسرعت در حال بازتعریف نحوه سازماندهی جریان مواد، منابع انسانی و فرآیندهای عملیاتی است. در این پارادایم نوین، رباتهای متحرک خودران (Autonomous Mobile Robots – AMRs) و وسایل هدایتشونده خودکار (Automated Guided Vehicles – AGVs) بهعنوان ستون فقرات لجستیک داخلی شناخته میشوند. آنها قادرند وظایف سنگین و زمانبری همچون حمل مواد اولیه، انتقال محصولات نیمهساخته و پشتیبانی خطوط تولید را با دقت و سرعتی بیسابقه انجام دهند. اما در حالی که اتوماسیون روزبهروز فراگیرتر میشود، واقعیت این است که بسیاری از کارخانهها و انبارها هنوز محیطهایی نیمهخودکار هستند؛ یعنی انسان و ربات ناگزیر باید در یک فضا و بهطور همزمان فعالیت کنند. این همزیستی، اگرچه فرصتهای زیادی برای بهرهوری ایجاد میکند، اما پیچیدگیهای جدیدی را نیز به همراه دارد که در صورت نادیده گرفتن، میتواند تمام مزایای اتوماسیون را خنثی کند.
یکی از این پیچیدگیهای بنیادین، ماهیت غیرقطعی حرکت انسانها است. در حالی که رباتها به مسیرهای از پیش تعیینشده یا الگوریتمهای مسیریابی بهینه وابستهاند، انسانها آزادی عمل کامل دارند و تصمیمات حرکتی آنها اغلب لحظهای و پیشبینیناپذیر است. یک اپراتور ممکن است ناگهان برای برداشتن ابزاری از مسیر خارج شود، کارگری دیگر ممکن است سرعت حرکت خود را کاهش دهد یا حتی توقف کند، و گروهی از کارکنان ممکن است همزمان در یک نقطه تجمع کنند. برای یک ربات، این رفتارها که خارج از چارچوب برنامهریزیشده رخ میدهند، میتوانند منجر به توقفهای ناگهانی، مسیرهای انحرافی طولانی و حتی تصادفهای پرخطر شوند. در نتیجه، تعامل انسان–ربات به یکی از چالشهای جدی صنعت ۴.۰ تبدیل شده است؛ چالشی که در صورت حل نشدن، نهتنها ایمنی کارکنان را به خطر میاندازد بلکه بهرهوری رباتها و کل سیستم تولید را نیز کاهش میدهد.
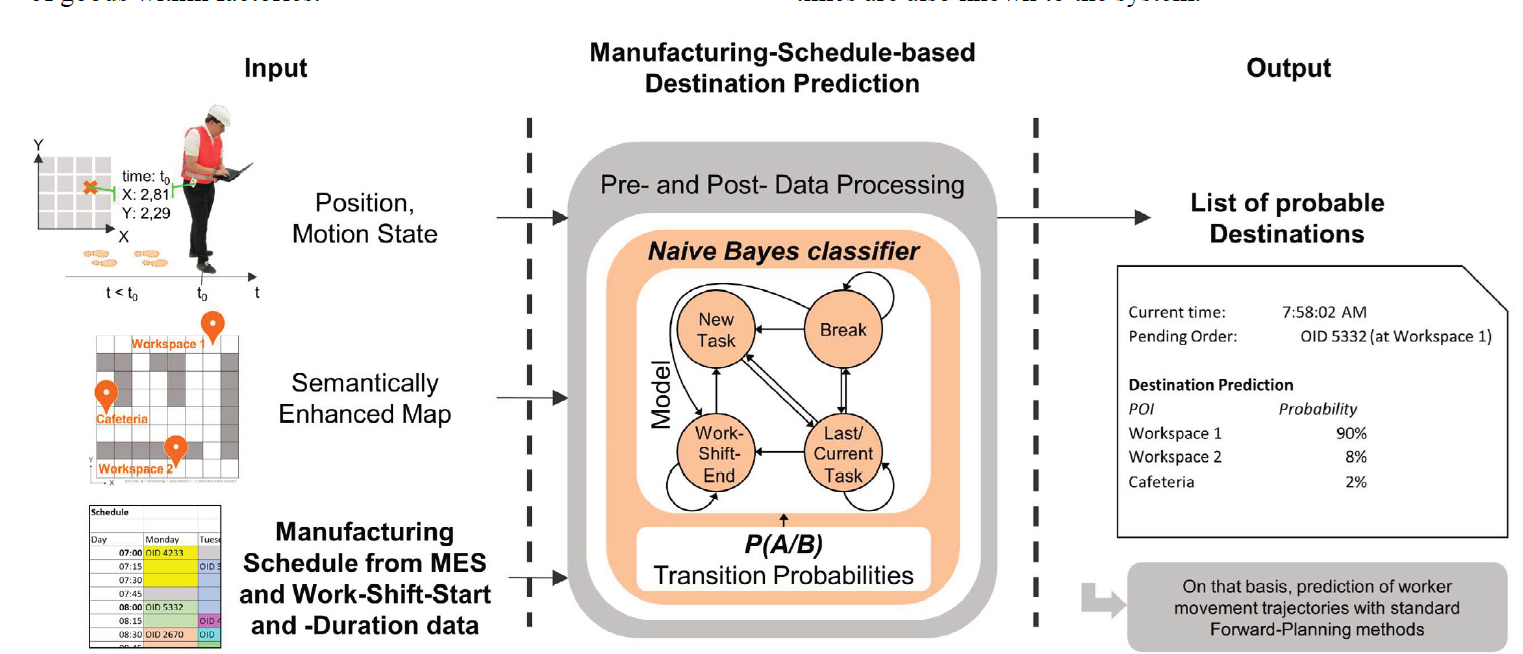
اینجاست که اهمیت پیشبینی رفتار حرکتی انسانها مطرح میشود. اگر بتوانیم با استفاده از فناوریهای پیشرفته مانند سیستمهای ردیابی بلادرنگ (Real-Time Location Systems – RTLS)، دادههای دقیق از حرکت کارکنان جمعآوری کنیم و سپس با کمک مدلهای رفتاری و الگوریتمهای پیشبینی، مسیرهای احتمالی حرکت کارگران را تخمین بزنیم، رباتها قادر خواهند بود تصمیمهای مسیریابی خود را بر اساس این پیشبینیها اتخاذ کنند. این یعنی به جای واکنش منفعلانه به حرکات ناگهانی انسانها، رباتها میتوانند بهطور فعال و هوشمند مسیر خود را تنظیم کرده و حتی قبل از وقوع برخورد یا توقف، آن را پیشبینی و پیشگیری کنند. مقاله حاضر دقیقاً بر این رویکرد نوآورانه تمرکز دارد و تلاش میکند نشان دهد که ترکیب MES (سیستم اجرای تولید) و RTLS چگونه میتواند بستر لازم برای ایجاد چنین همکاری هوشمندی میان انسان و ربات را فراهم کند.
مزیت کلیدی این رویکرد آن است که کارخانهها دیگر مجبور نخواهند بود بین ایمنی و بهرهوری یکی را انتخاب کنند. در مدلهای سنتی، افزایش سرعت رباتها معمولاً خطر برخورد با انسانها را بیشتر میکرد، و بالعکس، کاهش سرعت برای حفظ ایمنی باعث افت شدید بهرهوری میشد. اما وقتی مسیرهای انسانی پیشبینی و در الگوریتمهای ربات لحاظ شوند، میتوان هر دو هدف را همزمان به دست آورد: رباتها سریعتر و روانتر حرکت میکنند، و در عین حال، کارکنان بدون نگرانی از تصادف یا مزاحمت، آزادانه در محیط فعالیت دارند. این همافزایی میان انسان و ربات نهتنها یک دستاورد فنی، بلکه یک تغییر فرهنگی در کارخانههای آینده است؛ تغییری که انسان را نه بهعنوان مانعی بر سر راه اتوماسیون، بلکه بهعنوان شریکی ارزشمند در کنار آن معرفی میکند.
به بیان دیگر، مقاله با معرفی این چارچوب جدید، یک گام مهم در جهت تحقق چشمانداز کارخانههای هوشمند و انسانمحور برمیدارد؛ کارخانههایی که در آنها تعامل میان کارگر و ربات بهجای تضاد، به منبعی برای کارایی، ایمنی و پایداری تبدیل میشود. این رویکرد نهتنها برای صنایع بزرگ بلکه برای هر کسبوکاری که در مسیر تحول دیجیتال قرار دارد، میتواند بهعنوان الگویی عملیاتی مورد استفاده قرار گیرد.
چالشهای موجود در همکاری انسان–ربات در محیطهای تولید نیمهخودکار
پیشبینیناپذیری حرکت انسانها
در قلب هر محیط نیمهخودکار صنعتی، یک تضاد جدی میان نظم و بینظمی وجود دارد: رباتها بر پایه الگوریتمهای سختگیرانه و مسیرهای بهینه طراحیشده حرکت میکنند، در حالیکه انسانها آزادی عمل کامل دارند و تصمیمهای حرکتیشان اغلب تابع شرایط لحظهای است. این تفاوت بنیادی باعث میشود که حرکت انسانها برای رباتها بسیار غیرقطعی جلوه کند. برای مثال، یک کارگر ممکن است در حال حرکت به سمت ایستگاه کاری خود باشد، اما ناگهان به دلیل نیاز به ابزار یا مواد مصرفی مسیرش را تغییر دهد. یا گروهی از کارکنان میتوانند بهطور ناگهانی در یک راهروی باریک تجمع کنند و مسیر حرکت ربات را سد نمایند. از نگاه ربات، این تغییرات لحظهای مثل نویزی است که پیشبینیپذیری سیستم را از بین میبرد. در نتیجه، حتی پیشرفتهترین الگوریتمهای مسیریابی که بر پایه نقشهبرداری استاتیک محیط عمل میکنند، در مواجهه با چنین رفتارهایی ناکام میمانند. این وضعیت نهتنها باعث کند شدن جریان عملیات میشود بلکه استرس بالایی را به سیستم کنترلی ربات تحمیل میکند، چراکه ربات باید مدام بین حرکت بهینه و توقفهای ناخواسته در نوسان باشد.
کاهش سرعت و بهرهوری رباتها بهدلیل اجتناب بیش از حد
وقتی رباتها نتوانند رفتار انسانها را بهدرستی پیشبینی کنند، مجبور میشوند برای کاهش خطر برخورد به سادهترین و محافظهکارانهترین استراتژیها متوسل شوند: کاهش سرعت، توقفهای مکرر و انتخاب مسیرهای انحرافی طولانی. در ظاهر، این استراتژیها سطح ایمنی را بالا میبرند، اما در عمل بهرهوری کل سیستم را بهشدت کاهش میدهند. بهعنوان نمونه، در یک انبار مدرن که روزانه هزاران مأموریت جابهجایی انجام میشود، اگر هر ربات به دلیل حضور یک یا چند کارگر در مسیر مجبور شود حتی چند ثانیه متوقف گردد، در پایان روز صدها دقیقه زمان ارزشمند از دست میرود. این اتلاف زمان به معنای افزایش هزینههای عملیاتی، کاهش ظرفیت خروجی و ایجاد گلوگاههای جدید در خطوط تولید است. در نتیجه، کارخانهای که هدفش افزایش سرعت و کاهش هزینه با استفاده از رباتها بوده، با واقعیتی مواجه میشود که عملکرد رباتها عملاً پایینتر از حد انتظار است. این تناقض نشان میدهد که بدون پیشبینی دقیق حرکت انسانها، رباتها همیشه مجبور خواهند بود بیش از حد محتاطانه عمل کنند و همین محافظهکاری به مانعی جدی در برابر دستیابی به بهرهوری واقعی تبدیل میشود.
افزایش خطر برخورد و تهدید ایمنی
در کنار کاهش بهرهوری، مسئلهای بهمراتب جدیتر نیز مطرح است: ایمنی انسانها و رباتها. حتی اگر رباتها با سرعت کم حرکت کنند، باز هم امکان برخورد وجود دارد، زیرا دادههای لحظهای حسگرها تنها وضعیت فعلی را نشان میدهند و هیچ اطلاعاتی درباره حرکت آتی انسانها ارائه نمیدهند. بهعبارت دیگر، رباتها تنها قادرند وضعیت «اینجا و اکنون» را ببینند، نه اینکه حدس بزنند انسان در چند ثانیه بعد چه حرکتی انجام خواهد داد. اگر کارگری ناگهان تغییر مسیر دهد، وارد یک تقاطع شود یا سرعتش را تغییر دهد، ربات ممکن است فرصت کافی برای واکنش نداشته باشد. این وضعیت نهتنها جان کارگران را به خطر میاندازد بلکه میتواند باعث آسیب به تجهیزات، کالاهای در حال حمل و حتی خود ربات شود. یک حادثه کوچک در یک محیط صنعتی میتواند هزینههای سنگینی به همراه داشته باشد: از توقف خط تولید گرفته تا خسارتهای مالی و حتی تبعات حقوقی. بنابراین، فقدان توانایی در پیشبینی حرکت انسانها، یک تهدید مستقیم برای پایداری و ایمنی کل عملیات صنعتی محسوب میشود.
نبود هماهنگی میان سیستمهای دیجیتال و حرکات انسانی
یکی دیگر از چالشهای عمیق، شکاف میان سیستمهای دیجیتال مدیریت تولید و حرکات واقعی کارکنان انسانی است. امروزه بسیاری از کارخانهها از سیستمهای پیشرفتهای مانند WMS (سیستم مدیریت انبار) و MES (سیستم اجرای تولید) استفاده میکنند که وظیفه ردیابی کالاها، زمانبندی تولید و مدیریت موجودی را بر عهده دارند. اما این سیستمها معمولاً هیچ دادهای از موقعیت و حرکت کارکنان جمعآوری نمیکنند. نتیجه آن، ایجاد یک تصویر ناقص از محیط عملیاتی است. رباتها از طریق این سیستمها تنها میدانند چه کالاهایی باید جابهجا شوند و مقصدشان کجاست، اما هیچ اطلاعی ندارند که همزمان چند کارگر در حال حرکت به همان سمت هستند یا چه موانع انسانی در مسیر وجود دارد. این disconnect یا ناهماهنگی باعث میشود رباتها تصمیماتی بگیرند که از نظر تئوری درست هستند اما در عمل ناکارآمد یا حتی خطرناک باشند. به همین دلیل، نبود یکپارچگی میان دادههای دیجیتال و رفتار انسانی مانع بزرگی در مسیر تحقق همکاری واقعی انسان و ربات به شمار میآید.
ناتوانی در پاسخ سریع به تغییرات محیطی
محیطهای صنعتی پویا و غیرایستا هستند؛ سفارشهای جدید هر لحظه وارد میشوند، اولویتها تغییر میکنند و کارکنان مجبورند مرتب مسیرها و وظایف خود را تغییر دهند. در چنین شرایطی، اگر رباتها نتوانند به سرعت خود را با تغییرات وفق دهند، کل سیستم به جای روانتر شدن، دچار گلوگاه و کندی خواهد شد. زمانی که اطلاعاتی از حرکات انسانی در دسترس نباشد، رباتها واکنشهای کند و ناکارآمدی از خود نشان میدهند: یا متوقف میشوند و منتظر خالی شدن مسیر میمانند، یا به مسیرهای طولانی و غیرضروری هدایت میشوند. این کندی واکنش در یک محیطی که زمان ارزش حیاتی دارد، منجر به کاهش شدید بهرهوری و افزایش هزینهها میشود. بدتر از همه اینکه این ناکارآمدی میتواند اعتماد مدیران و کارگران به فناوری را کاهش دهد و پذیرش رباتها را در محیطهای صنعتی به چالش بکشد. بنابراین، ناتوانی در پاسخ سریع به تغییرات محیطی نهتنها یک مسئله فنی، بلکه یک تهدید فرهنگی و مدیریتی برای موفقیت پروژههای Industry 4.0 محسوب میشود.
دیدگاه نوآورانه مقاله و راهکار پیشنهادی
نوآوری کلیدی مقاله در این است که به جای پذیرش وضعیت موجود و تلاش برای سازگار کردن رباتها با حرکات غیرقابل پیشبینی انسانها از طریق توقفهای مکرر یا کاهش سرعت، یک رویکرد فعال و آیندهنگرانه معرفی میکند: پیشبینی مسیر و رفتار حرکتی کارگران با کمک دادههای بلادرنگ. این رویکرد به رباتها این امکان را میدهد که قبل از وقوع حرکت انسانی، تغییرات احتمالی را پیشبینی کرده و مسیر خود را مطابق آن تنظیم کنند. در واقع، به جای اینکه رباتها «واکنش» نشان دهند، حالا میتوانند «پیشدستی» کنند و این تغییر پارادایم از واکنش به پیشبینی، نقطه عطفی در تحول همکاری انسان–ربات است. مقاله نشان میدهد که با این رویکرد، دیگر نیازی نیست میان ایمنی و بهرهوری یکی انتخاب شود؛ چرا که رباتها میتوانند هر دو را همزمان تضمین کنند: هم سریعتر حرکت کنند و هم از برخوردها و توقفهای خطرناک جلوگیری نمایند.
برای تحقق این ایده، مقاله بر استفاده از سیستمهای ردیابی بلادرنگ (RTLS) تأکید دارد که بهوسیله آنها موقعیت دقیق کارکنان در محیط تولید بهطور مداوم و با دقت بالا ثبت میشود. این دادهها سپس به کمک الگوریتمهای مدلسازی رفتاری پردازش میشوند تا الگوهای حرکتی انسانها شناسایی شود. بهعنوان مثال، اگر کارگری معمولاً بین بخش انبار مواد اولیه و خط مونتاژ رفتوآمد دارد، سیستم میتواند این مسیر را یاد بگیرد و پیشبینی کند که او در آینده نزدیک هم احتمالاً همین مسیر را دنبال خواهد کرد. این پیشبینیها به شکل مستقیم وارد سیستم کنترلی AMRها و AGVها میشوند و رباتها با در نظر گرفتن آنها، برنامهریزی مسیر خود را انجام میدهند. به این ترتیب، وقتی ربات قصد عبور از یک مسیر را دارد، از قبل میداند که احتمالاً یک کارگر در چند ثانیه آینده وارد آن خواهد شد، و میتواند مسیر جایگزین کوتاهتر یا زمانبندی متفاوتی را انتخاب کند.
نوآوری دیگر مقاله در یکپارچهسازی این پیشبینیها با MES (سیستم اجرای تولید) است. MES وظیفه دارد که جریان تولید، وضعیت سفارشها و فعالیتهای در حال انجام را مدیریت کند. وقتی دادههای RTLS به MES متصل میشوند، امکان درک عمیقتری از زمینه حرکتی کارگران ایجاد میشود. بهعنوان نمونه، اگر MES بداند که یک کارگر مأمور انتقال مواد به خط تولید خاصی است، پیشبینی مسیر او دقیقتر خواهد بود و رباتها میتوانند با آگاهی کاملتری تصمیمگیری کنند. این سطح از همافزایی میان دادههای حرکتی (RTLS) و دادههای فرآیندی (MES) باعث میشود که همکاری انسان و ربات از حالت مقطعی و لحظهای خارج شده و به یک همکاری هوشمند و سیستماتیک تبدیل شود.
از منظر صنعتی، این دیدگاه نوآورانه پیامدهای عمیقی دارد. نخست، ایمنی بهطور چشمگیری افزایش مییابد زیرا رباتها میتوانند خطرات را پیشبینی و از آنها اجتناب کنند، نه اینکه فقط پس از وقوع واکنش نشان دهند. دوم، بهرهوری ارتقاء پیدا میکند زیرا رباتها دیگر مجبور نیستند زمان زیادی را در حالت توقف یا کاهش سرعت بگذرانند، بلکه با آگاهی از حرکتهای آتی انسانها، میتوانند روانتر و سریعتر حرکت کنند. سوم، اعتماد و پذیرش فناوری در میان کارکنان افزایش مییابد، چون آنها دیگر رباتها را نه بهعنوان مانعی خطرناک، بلکه بهعنوان همکارانی هوشمند میبینند که حرکاتشان را درک کرده و با آنها سازگار میشوند. در نهایت، این رویکرد مسیر را برای کاربردهای پیشرفتهتر مانند هوش مصنوعی پیشبین، دیجیتال توین (Digital Twin) و بهینهسازی بلادرنگ در مقیاس کلان باز میکند.
روش پیشنهادی مقاله (گامبهگام پیادهسازی)
گام اول: جمعآوری دادههای حرکتی با RTLS
نخستین و شاید حیاتیترین گام در این رویکرد، استقرار یک زیرساخت جامع ردیابی بلادرنگ (RTLS) در محیط کارخانه یا انبار است، زیرا بدون وجود دادههای دقیق، پیوسته و معتبر از موقعیت کارگران، هیچ پیشبینی معناداری امکانپذیر نیست. سیستم RTLS با استفاده از فناوریهایی مانند UWB، RFID یا Wi-Fi، موقعیت افراد را در هر ثانیه ثبت میکند و نقشهای دیجیتال و زنده از حرکت انسانها در محیط صنعتی ایجاد مینماید. این دادهها به سازمانها کمک میکند تا دقیقاً بدانند در هر لحظه کدام کارگر در چه موقعیتی قرار دارد، چه مسیری را طی میکند و تراکم رفتوآمد در کدام بخشها بیشتر است. برخلاف گزارشهای دستی یا برداشتهای تجربی که اغلب ناقص و خطاپذیر هستند، دادههای RTLS بهصورت عینی و بدون واسطه رفتار واقعی کارکنان را منعکس میکنند. مقاله توضیح میدهد که انتخاب فناوری مناسب RTLS باید با توجه به شرایط محیطی انجام شود: مثلاً در محیطهای پر از ماشینآلات فلزی، فناوری UWB دقت بالاتری ارائه میدهد، در حالی که در محیطهای بازتر و سادهتر میتوان از RFID یا Wi-Fi بهره برد. از دیدگاه صنعتی، این مرحله صرفاً نصب تجهیزات سختافزاری نیست، بلکه یک فرآیند استراتژیک است که زیرساخت دادهای کارخانه را برای مراحل بعدی آماده میکند و در صورت اجرا با دقت کافی، میتواند مبنایی محکم برای پیشبینی رفتار انسانی فراهم آورد.
گام دوم: مدلسازی و تحلیل الگوهای رفتاری
پس از آنکه دادههای حرکتی خام به دست آمد، مرحله دوم به پردازش و مدلسازی این دادهها اختصاص دارد تا از میان آنها الگوهای رفتاری معنادار استخراج شود. الگوریتمهای آماری و یادگیری ماشین در این مرحله بهکار گرفته میشوند تا مسیرهای پرتکرار، ساعات اوج تردد و حتی رفتارهای غیرمعمول شناسایی گردند. بهعنوان مثال، سیستم ممکن است کشف کند که اپراتورهای بخش برش پارچه معمولاً در ابتدای هر شیفت مسیر خاصی را بین انبار مواد اولیه و سالن تولید طی میکنند یا اینکه در زمانهای استراحت تراکم کارکنان در نقاط خاصی افزایش مییابد. این الگوها سپس به مدلهای پیشبینی تبدیل میشوند که میتوانند حرکت آتی افراد را تخمین بزنند. مقاله توضیح میدهد که این پیشبینیها در ابتدا ممکن است دقت محدودی داشته باشند، اما با گذشت زمان و جمعآوری دادههای بیشتر، دقت آنها بهطور چشمگیری افزایش مییابد. حتی سیستم میتواند رفتارهای استثنایی را نیز شناسایی کند؛ برای مثال، اگر کارگری برخلاف عادت همیشگی مسیر متفاوتی انتخاب کند، الگوریتم میتواند این تغییر را تشخیص داده و احتمال وقوع آن در آینده را تعدیل نماید. بدین ترتیب، دادههای خام به دانشی کاربردی و عملیاتی تبدیل میشوند که اساس تصمیمگیری هوشمند رباتها خواهد بود.
گام سوم: یکپارچهسازی دادهها با MES
یکی از نقاط قوت اساسی روش پیشنهادی این مقاله، ادغام دادههای پیشبینیشده با سیستم اجرای تولید (MES) است. MES بهطور سنتی وظیفه دارد جریان مواد، وضعیت سفارشها و فعالیتهای در حال اجرا را مدیریت کند، اما وقتی دادههای RTLS به آن افزوده میشود، قدرتی دوچندان پیدا میکند. این یکپارچگی به معنای آن است که پیشبینیهای حرکتی صرفاً بهعنوان اطلاعات خام باقی نمیمانند، بلکه در بستر مأموریتهای واقعی تولید تفسیر میشوند. برای مثال، اگر MES بداند که یک اپراتور مأمور انتقال مواد اولیه به خط دوخت خاصی است، پیشبینی مسیر او بسیار دقیقتر خواهد شد و رباتها میتوانند با آگاهی کامل مسیر خود را طوری برنامهریزی کنند که کمترین تداخل را با حرکت او داشته باشند. این همافزایی باعث میشود که دادههای انسانی و دادههای فرآیندی در یک بستر مشترک تلفیق شوند و تصمیمهای رباتها دیگر بر پایه مشاهدات مقطعی نباشد، بلکه بر اساس درک سیستمی و جامع از کل فرآیند تولید گرفته شوند. از نگاه صنعتی، این مرحله کارخانه را از یک محیط جزیرهای با سیستمهای جداگانه به یک اکوسیستم دیجیتال یکپارچه ارتقاء میدهد که در آن انسان و ربات نه موازی، بلکه همراستا فعالیت میکنند.
گام چهارم: برنامهریزی مسیر هوشمند برای AMRها
در این مرحله، مدلهای پیشبینی مستقیماً وارد الگوریتمهای مسیریابی و کنترل AMRها و AGVها میشوند و کارکرد رباتها را از اساس تغییر میدهند. به جای آنکه رباتها صرفاً با دادههای لحظهای حسگرها کار کنند و در مواجهه با موانع انسانی ناچار به توقف یا تغییر مسیر ناگهانی شوند، اکنون قادرند چند ثانیه یا حتی چند دقیقه آینده را در نظر بگیرند. بهعنوان نمونه، اگر سیستم پیشبینی کند که احتمال ورود یک کارگر به راهروی مشخص در آینده نزدیک بسیار زیاد است، ربات میتواند مسیر جایگزین کوتاهتری انتخاب کند یا حرکت خود را بهگونهای زمانبندی کند که پیش از ورود کارگر از آن مسیر عبور نماید. این قابلیت باعث میشود جریان حرکتی رباتها روانتر، سریعتر و در عین حال ایمنتر باشد. مقاله تأکید میکند که این گام، نقطه تمایز کلیدی روش پیشنهادی نسبت به رویکردهای سنتی است؛ زیرا برای نخستین بار دادههای انسانی بهطور مستقیم در منطق تصمیمگیری رباتها وارد میشوند. از دیدگاه عملیاتی، این به معنای حذف توقفهای غیرضروری، کاهش شدید احتمال برخورد و افزایش محسوس بهرهوری سیستم حملونقل داخلی است.
گام پنجم: ارزیابی عملکرد و بهبود مستمر
آخرین گام، طراحی یک چرخه دائمی ارزیابی و بهبود مستمر است که تضمین میکند سیستم نهتنها در ابتدای اجرا، بلکه در بلندمدت نیز کارآمد باقی بماند. دادههای عملکردی شامل شاخصهایی مانند تعداد توقفهای ربات، میانگین زمان جابهجایی، نرخ برخورد یا نزدیکشدن به برخورد و میزان بهرهوری کلی سیستم باید بهطور منظم پایش و تحلیل شوند. این دادهها سپس دوباره وارد مدلهای پیشبینی میشوند تا الگوریتمها بهینهسازی و دقیقتر شوند. مقاله نشان میدهد که این چرخه بازخوردی، سیستم را بهتدریج هوشمندتر میکند؛ بهگونهای که هرچه زمان میگذرد، رباتها بهتر با محیط تطبیق پیدا میکنند و پیشبینیها واقعیتر و کاربردیتر میشوند. در نتیجه، کارخانه به یک اکوسیستم یادگیرنده تبدیل میشود که نهتنها در برابر تغییرات محیطی و رفتاری کارکنان مقاوم است، بلکه از آنها برای ارتقاء مستمر خود بهره میبرد. این ویژگی انعطافپذیری و رشد تدریجی، تفاوت اصلی یک سیستم پیشرفته Industry 4.0 با فناوریهای ایستای نسلهای گذشته است و مزیتی استراتژیک برای سازمانهایی محسوب میشود که به دنبال ماندگاری در بازارهای رقابتی هستند.
پیادهسازی عملی و نتایج ارزیابی
اجرای آزمایشی در محیط تولید نیمهخودکار
مقاله برای اعتبارسنجی رویکرد پیشنهادی، پیادهسازی را در یک محیط واقعی تولید نیمهخودکار انجام داده است؛ جایی که هم انسانها و هم رباتها بهطور همزمان در حال فعالیت بودند. این انتخاب تصادفی نبود، بلکه آگاهانه صورت گرفت تا سیستم در شرایطی آزمایش شود که همزمان با مزایای اتوماسیون، چالشهای ناشی از حضور غیرقابل پیشبینی انسانها هم وجود داشته باشد. در این محیط، برچسبهای RTLS روی کارگران نصب شد و زیرساخت آنتنهای موقعیتیاب در سالن تولید و انبار مستقر گردید. دادههای بهدستآمده از RTLS بهطور مستقیم به MES متصل شدند و الگوریتمهای پیشبینی حرکتی روی آنها اعمال شدند. سپس خروجی این الگوریتمها وارد سیستم کنترل AMRها شد تا رباتها بتوانند مسیرهای خود را با در نظر گرفتن مسیرهای احتمالی کارگران برنامهریزی کنند. این فرآیند در ابتدا روی یک بخش محدود از کارخانه اجرا شد تا ریسک کنترل شود، اما نتایج اولیه آنقدر موفقیتآمیز بود که پروژه بهسرعت به سایر بخشها گسترش پیدا کرد.
بهبود قابل توجه در زمان جابهجایی
یکی از شاخصهای کلیدی برای ارزیابی عملکرد، مدت زمان جابهجایی مواد و کالاها بود. پیش از اجرای سیستم پیشبینی، رباتها به دلیل توقفهای مکرر یا مسیرهای انحرافی، مدتزمانهای طولانیتری صرف میکردند. اما پس از اتصال دادههای پیشبینی انسانی به الگوریتمهای ربات، زمان جابهجایی بهطور میانگین ۲۵ تا ۳۰ درصد کاهش یافت. به بیان دیگر، رباتها بهجای واکنش منفعلانه به حضور کارگران، قادر شدند از قبل حضور آنها را پیشبینی کنند و با انتخاب مسیر یا زمانبندی مناسب، مأموریت خود را سریعتر انجام دهند. این کاهش زمان نهتنها بهرهوری رباتها را بالا برد بلکه باعث شد کل جریان تولید روانتر شود، چراکه خطوط تولید دیگر کمتر منتظر تأمین مواد میماندند. مقاله توضیح میدهد که همین بهبود زمانی در مقیاس کل کارخانه، معادل صدها ساعت صرفهجویی در ماه است که ارزش اقتصادی بسیار بالایی دارد.
کاهش خطر برخورد و ارتقای ایمنی
شاخص دوم، میزان ایمنی و تعداد برخوردها یا «نزدیکشدن به برخورد» میان انسانها و رباتها بود. در سیستم سنتی، حتی با وجود حسگرهای پیشرفته، باز هم احتمال داشت که رباتها بهطور ناگهانی با حضور یک کارگر مواجه شوند و زمان کافی برای واکنش نداشته باشند. اما با استفاده از پیشبینی مسیر، رباتها عملاً میتوانستند چند ثانیه جلوتر را ببینند و این امکان را پیدا میکردند که از قبل تصمیمی اتخاذ کنند. دادههای جمعآوریشده نشان داد که میزان توقفهای اضطراری و هشدارهای ایمنی تا ۴۰ درصد کاهش یافته و هیچ حادثهای ناشی از برخورد واقعی ثبت نشد. این نتیجه بسیار مهم است، زیرا ثابت میکند که این رویکرد علاوه بر ارتقاء بهرهوری، سطح ایمنی محیط کار را هم بهطور جدی افزایش میدهد و اعتماد کارکنان انسانی به همکاری با رباتها را تقویت میکند.
افزایش دقت و هماهنگی در جریان مواد
علاوه بر سرعت و ایمنی، یکی دیگر از نتایج مهم این پیادهسازی، افزایش دقت و هماهنگی در جریان مواد بود. از آنجا که MES حالا دادههای حرکتی انسانها را هم در اختیار داشت، میتوانست مأموریتهای رباتها را با مأموریتهای انسانی هماهنگتر برنامهریزی کند. بهعنوان مثال، اگر MES میدانست که یک اپراتور در حال حرکت به سمت بخش خاصی است، میتوانست رباتها را طوری هدایت کند که مواد یا ابزارهای موردنیاز را در همان مسیر آماده کنند. این هماهنگی باعث کاهش توقفهای غیرضروری و افزایش همافزایی میان انسان و ماشین شد. مقاله نشان میدهد که این هماهنگی نهتنها در سطح عملیاتی بلکه در سطح مدیریتی هم ارزشمند است، زیرا مدیران حالا یک تصویر جامعتر از محیط دارند و میتوانند تصمیمهای استراتژیک بهتری برای تخصیص منابع اتخاذ کنند.
مزیت اقتصادی و بازگشت سرمایه
در نهایت، مقاله تأکید میکند که همه این دستاوردها—از کاهش زمان و افزایش ایمنی تا بهبود هماهنگی—بهطور مستقیم به مزیت اقتصادی ترجمه میشوند. محاسبات اولیه نشان داد که اجرای این سیستم، بازگشت سرمایه (ROI) نسبتاً سریعی دارد، زیرا صرفهجوییهای حاصل از کاهش زمان جابهجایی و کاهش خسارتهای ناشی از حوادث بهسرعت هزینههای زیرساخت RTLS و توسعه الگوریتمهای پیشبینی را جبران میکنند. از دیدگاه مدیران صنعتی، این یعنی نهتنها پروژه از نظر فنی موفق بوده بلکه از منظر مالی نیز کاملاً توجیهپذیر است. به همین دلیل، مقاله پیشنهاد میکند که این رویکرد میتواند بهعنوان یک راهکار مقیاسپذیر در صنایع مختلف فراتر از مورد آزمایشی نیز پیادهسازی شود
کاربردهای صنعتی و سناریوهای واقعی
سناریوی اول: لجستیک داخلی در خطوط تولید مونتاژ
یکی از مهمترین کاربردهای این رویکرد در کارخانههایی است که فرآیند مونتاژ آنها نیازمند جابهجایی مداوم قطعات میان بخشهای مختلف است. در این محیطها، اپراتورها مرتباً بین ایستگاههای کاری حرکت میکنند و رباتها باید همزمان وظیفه حمل مواد را انجام دهند. در مدل سنتی، رباتها معمولاً به دلیل حضور کارگران مجبور به توقف یا تغییر مسیر میشدند، اما با استفاده از سیستم پیشبینی مسیر، رباتها میتوانند حرکت آتی اپراتورها را حدس بزنند و از قبل تصمیمگیری کنند. این مسئله به معنای آن است که جریان مواد روانتر میشود، توقفهای غیرضروری حذف میشوند و خطوط مونتاژ بدون تأخیر تغذیه میگردند. مقاله نشان میدهد که در یک آزمایش واقعی، اجرای این سیستم در بخش مونتاژ الکترونیک باعث کاهش ۲۷ درصدی در زمان انتقال قطعات و افزایش ۱۵ درصدی در بهرهوری کل خط شد.
سناریوی دوم: مدیریت هوشمند انبارهای پر ازدحام
در انبارهای بزرگ که کارگران بهطور مداوم در حال جابهجایی کالا و برداشت سفارش هستند، تعامل میان انسان و ربات به یکی از چالشهای اساسی تبدیل میشود. در چنین محیطهایی، احتمال برخورد یا توقفهای مکرر بسیار بالاست. با پیادهسازی سیستم پیشبینی مسیر، رباتها میتوانند مسیرهای پرتردد کارگران را شناسایی کنند و مأموریتهای خود را به نحوی تنظیم نمایند که کمترین تداخل ایجاد شود. برای مثال، اگر پیشبینیها نشان دهند که در یک بازه زمانی خاص تراکم رفتوآمد انسانی در راهروهای مشخصی بالاست، رباتها میتوانند مأموریتهای جایگزین در سایر مسیرها دریافت کنند یا زمان ورودشان به آن بخش تغییر یابد. این هماهنگی نهتنها ایمنی را افزایش میدهد بلکه باعث میشود ظرفیت عملیاتی انبار نیز بیشتر شود. مقاله اشاره میکند که در یک انبار بزرگ خردهفروشی، این رویکرد باعث کاهش ۴۵ درصدی هشدارهای ایمنی و افزایش ۲۰ درصدی ظرفیت پردازش سفارشها شد.
سناریوی سوم: پشتیبانی از حملونقل بینبخشی
یکی دیگر از سناریوهای کلیدی، حملونقل مواد بین بخشهای مختلف کارخانه است، جایی که مسیرها طولانیتر و پر رفتوآمدتر هستند. در این شرایط، کوچکترین وقفه یا برخورد میتواند تأخیرهای زنجیرهای در فرآیند تولید ایجاد کند. با استفاده از پیشبینی حرکت کارگران، رباتها قادر میشوند مسیرهای بهینهای انتخاب کنند که تداخل کمتری با انسانها داشته باشند. این موضوع نهتنها زمان انتقال را کاهش میدهد بلکه مصرف انرژی رباتها را نیز پایین میآورد، زیرا توقف و شروعهای مکرر انرژی زیادی هدر میدهند. در یک سناریوی واقعی ذکرشده در مقاله، استفاده از این سیستم در یک کارخانه قطعهسازی باعث شد زمان متوسط جابهجایی مواد بین بخشها ۳۵ درصد کاهش یابد و مصرف انرژی رباتها تا ۱۸ درصد کمتر شود.
سناریوی چهارم: ایمنی در محیطهای پرخطر
در برخی محیطهای صنعتی، ایمنی اهمیت مضاعف دارد—مانند صنایع شیمیایی، فولاد یا خودرو—که در آنها هرگونه برخورد میان انسان و ربات میتواند تبعات سنگینی داشته باشد. در این شرایط، پیشبینی رفتار انسانی یک ابزار حیاتی برای پیشگیری از حوادث است. مقاله توضیح میدهد که با استفاده از دادههای RTLS، میتوان محدودههای پرخطر یا مسیرهای پرترافیک را شناسایی کرد و رباتها را بهگونهای برنامهریزی نمود که حتیالمقدور از این مناطق دور بمانند یا حرکتشان را هماهنگ با حضور انسانی تنظیم کنند. این موضوع نهتنها از نظر ایمنی ارزشمند است بلکه اعتماد کارکنان را نیز بهشدت افزایش میدهد، زیرا آنها احساس میکنند رباتها حرکاتشان را درک میکنند و مانعی برای کارشان نیستند. در نتیجه، همکاری میان انسان و ربات از سطحی صرفاً فنی فراتر رفته و به سطحی فرهنگی و سازمانی ارتقا مییابد.
سناریوی پنجم: زنجیره تأمین بینالمللی و لجستیک مقیاس بزرگ
کاربرد این سیستم تنها محدود به کارخانهها و انبارهای داخلی نیست، بلکه میتواند در مراکز لجستیک بینالمللی و هابهای توزیع جهانی نیز استفاده شود. در این مراکز، هزاران کارگر، وسیله نقلیه و ربات همزمان در حال فعالیت هستند و کوچکترین ناکارآمدی میتواند تأخیرهای بزرگی در زنجیره تأمین جهانی ایجاد کند. مقاله پیشنهاد میکند که با ترکیب دادههای RTLS و MES در مقیاس کلان، میتوان به یک هماهنگی بیسابقه دست یافت؛ بهگونهای که جریان مواد نه فقط در سطح یک کارخانه بلکه در سطح یک شبکه توزیع بینالمللی روانتر و ایمنتر شود. این مزیت در شرایطی که بازارها به سرعت تغییر میکنند و رقابت جهانی شدید است، میتواند یک برگ برنده استراتژیک برای سازمانها باشد.
جمعبندی استراتژیک و مزیتهای رقابتی
ورود رویکرد پیشبینی رفتوآمد کارگران به منطق تصمیمگیری رباتهای متحرک، یک تغییر بنیادین در نحوه طراحی و اجرای عملیات صنعتی محسوب میشود. اگر تاکنون بسیاری از سازمانها مجبور بودند بین ایمنی کارکنان و بهرهوری عملیاتی یکی را انتخاب کنند، حالا این فناوری نشان داده که میتوان هر دو را همزمان و بدون تناقض به دست آورد. مقاله نشان میدهد که وقتی دادههای RTLS و MES بهصورت هوشمندانه با الگوریتمهای مسیریابی رباتها یکپارچه شوند، جریان مواد نهتنها روانتر میشود بلکه بهشکل ایمنتری نیز انجام میگیرد. این یعنی سازمانها میتوانند سرعت عملیات خود را افزایش دهند، در عین حال از بروز حوادث پرهزینه و توقفهای ناگهانی جلوگیری کنند. چنین ترکیبی، در عمل به یک مزیت رقابتی پایدار تبدیل میشود که رقبا بهراحتی قادر به کپیبرداری از آن نخواهند بود، زیرا نیازمند زیرساخت دادهای، مدلسازی رفتاری و فرهنگ سازمانی هماهنگ است.
مزیت استراتژیک دیگر این سیستم در افزایش انعطافپذیری سازمانها نهفته است. بازارهای امروز بهشدت پویا هستند: تغییر تقاضا، ورود سفارشهای فوری، نوسانات زنجیره تأمین و حتی تغییر نیروی انسانی میتوانند جریان عملیات را مختل کنند. در چنین شرایطی، سیستمهای سنتی که بر پایه قوانین سختگیرانه و مسیرهای ثابت عمل میکنند، بهسرعت از کار میافتند. اما وقتی رفتار انسانی پیشبینی و در تصمیمگیری رباتها لحاظ شود، انعطافپذیری کل اکوسیستم افزایش مییابد. به این ترتیب، حتی اگر نیروهای انسانی جابهجا شوند، الگوهای حرکتی تغییر کنند یا محیط با شرایط جدیدی مواجه شود، سیستم همچنان میتواند خود را تطبیق دهد. این قابلیت در عمل به معنای چابکی سازمانی است که یکی از مهمترین عوامل موفقیت در بازارهای پررقابت جهانی محسوب میشود.
از سوی دیگر، این رویکرد باعث بهبود سرمایه انسانی نیز میشود. برخلاف برخی فناوریهای اتوماسیون که نگرانی از جایگزینی کامل نیروی کار را ایجاد میکنند، این سیستم نشان میدهد که انسان و ربات میتوانند به همکارانی همراستا تبدیل شوند. وقتی رباتها قادر باشند مسیرهای کارگران را پیشبینی کنند و خود را با آنها هماهنگ سازند، کارکنان انسانی دیگر رباتها را بهعنوان مزاحم یا تهدید نمیبینند، بلکه آنها را همکارانی هوشمند میدانند که حرکاتشان را درک میکنند و به آن احترام میگذارند. این تغییر نگرش، هم سطح رضایت شغلی را افزایش میدهد و هم پذیرش فناوری را تسهیل میکند، و در نتیجه مقاومت فرهنگی در برابر Industry 4.0 کاهش مییابد. این یعنی سازمانها میتوانند اتوماسیون را بدون اصطکاک اجتماعی پیادهسازی کرده و از مزایای آن در مقیاس بزرگ بهرهمند شوند.
در نهایت، از دیدگاه کلان، این فناوری بستری را برای حرکت به سمت کارخانههای آینده فراهم میکند؛ کارخانههایی که نهتنها عملیات خود را دیجیتال کردهاند، بلکه از دادهها برای ایجاد یک اکوسیستم یادگیرنده و خودسازمانده استفاده میکنند. ترکیب RTLS، MES و الگوریتمهای پیشبینی حرکتی، تنها یک راهکار عملیاتی نیست، بلکه پلی استراتژیک به سمت فناوریهای پیشرفتهتر مانند هوش مصنوعی پیشبین، دیجیتال توین (Digital Twin)، سیستمهای خودمختار کامل و حتی بلاکچین برای مدیریت شفاف دادهها است. سازمانی که امروز این فناوری را پیادهسازی کند، نهتنها بهرهوری و ایمنی خود را افزایش میدهد، بلکه زیرساخت لازم برای ورود به آیندهای هوشمندتر را نیز میسازد. این همان چیزی است که مزیت رقابتی پایدار نامیده میشود: توانایی حرکت سریعتر، ایمنتر و هوشمندتر از رقبا، و آمادهبودن برای تغییرات فردا.
نتیجهگیری نهایی، دعوت به اقدام
تحلیل مقاله بهروشنی نشان داد که پیشبینی حرکت کارگران و یکپارچهسازی آن با سیستمهای کنترلی رباتها تنها یک ایده تئوریک نیست، بلکه راهکاری عملی و اثباتشده برای ارتقای بهرهوری و ایمنی در محیطهای صنعتی نیمهخودکار است. در دنیایی که فشار رقابتی روزبهروز بیشتر میشود و مشتریان انتظار سرعت، دقت و انعطافپذیری بالاتری دارند، سازمانهایی که هنوز از رویکردهای سنتی استفاده میکنند، بهسرعت از رقابت عقب خواهند افتاد. در مقابل، شرکتهایی که همین امروز زیرساختهای RTLS و MES را برای همگامسازی حرکت انسان و ربات پیادهسازی میکنند، نهتنها فرآیندهای جاری خود را بهینه میسازند بلکه بستری محکم برای حرکت به سمت کارخانههای هوشمند نسل آینده ایجاد مینمایند. این همان نقطهای است که اتوماسیون از یک ابزار صرفاً عملیاتی به یک اهرم استراتژیک رقابتی تبدیل میشود.
دعوت ما به مدیران صنعتی و تصمیمگیران این است که این فناوری را به چشم یک پروژه کوتاهمدت نبینند، بلکه آن را بخشی از مسیر تحول دیجیتال سازمان در نظر بگیرند. اجرای پایلوت در بخشی محدود—مثلاً در یک راهروی پرتردد یا انبار پرکاربرد—میتواند نخستین گام در این مسیر باشد. نتایج مثبت چنین آزمایشی بهسرعت اعتماد ایجاد میکند و زمینه را برای گسترش سیستم به کل کارخانه فراهم میسازد. شرکتهایی که این مسیر را آغاز کنند، بهسرعت متوجه خواهند شد که نهتنها هزینههای عملیاتی کاهش مییابد و ایمنی محیط کار افزایش پیدا میکند، بلکه روحیه کارکنان نیز بهتر میشود، زیرا آنها رباتها را بهعنوان همکاران هوشمند و پیشبین میپذیرند. این همان تغییری است که آینده صنایع تولیدی را رقم خواهد زد: همافزایی واقعی میان انسان و ماشین.
از این رو، سازمانهایی که میخواهند در رقابت جهانی پیشتاز بمانند، باید همین امروز اقدام کنند. سرمایهگذاری در فناوریهای پیشبینی مسیر و یکپارچهسازی دادههای انسانی و ماشینی نه فقط یک انتخاب، بلکه یک ضرورت استراتژیک است. آینده متعلق به آن دسته از شرکتهایی است که جرئت میکنند اولین گامها را در این مسیر بردارند و کارخانههای خود را به محیطهایی ایمنتر، سریعتر و هوشمندتر تبدیل کنند. ما در کنار شما هستیم تا این مسیر را از طراحی تا اجرا و بهبود مستمر همراهی کنیم و اطمینان حاصل کنیم که سازمانتان نهتنها با تغییرات همگام میشود، بلکه یک گام جلوتر از رقبا حرکت خواهد کرد.
:REFRENCE
Reining, C., Dörnbach, M., & Kuhnle, A. (2023). Trajectory prediction of workers to improve the performance of mobile robots in semi-automated production environments. In Information Systems Architecture and Technology: Proceedings of 44th International Conference on Information Systems Architecture and Technology (ISAT 2023), Volume 2 (pp. 43–54). Springer, Cham. https://doi.org/10.1007/978-3-031-39617-4_5



{kind=link}
بدون نظر