

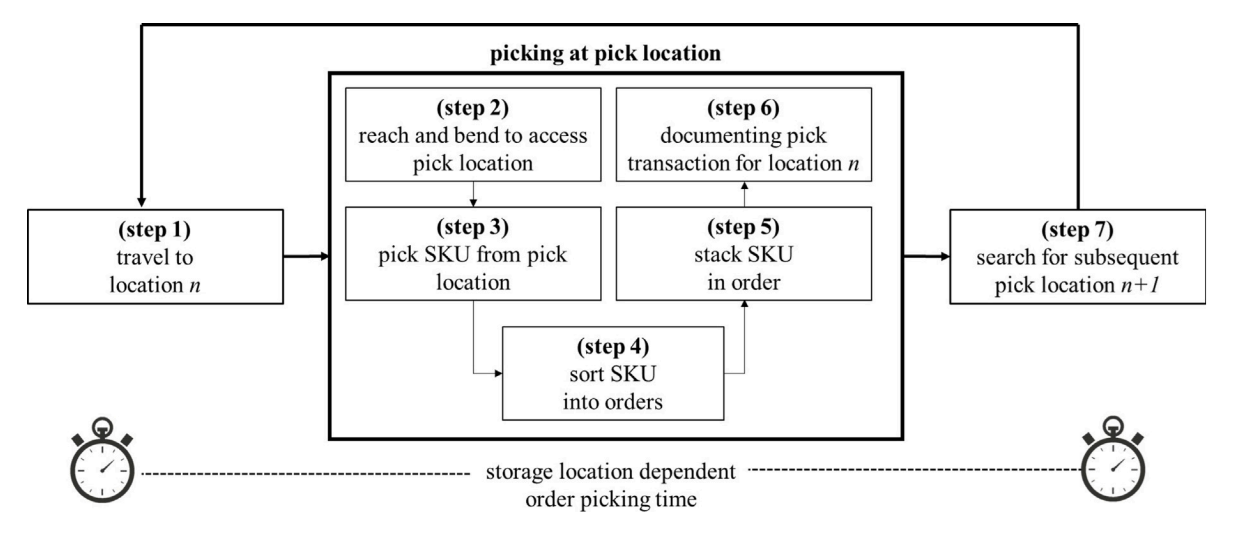
برداشت سفارش هوشمند با کمک AGV: نگاهی عمیق به عملکرد و تعامل سیستمها
طی دههی گذشته، رشد تجارت الکترونیک، افزایش فشار برای تحویل سریع و کمبود نیروی انسانی باعث شده که شرکتهای لجستیکی به سمت اتوماسیون مبتنی بر رباتهای حملبار خودکار (AGV) و رباتهای متحرک خودمختار (AMR) حرکت کنند. در این میان، یکی از نقاط تمرکز اصلی صنعت، حوزهی Order Picking یا همان انتخاب و انتقال سفارشها در انبار است — فرآیندی که بیش از ۵۰٪ از هزینهی کل انبارداری را تشکیل میدهد. از اینرو، کوچکترین بهبود در آن میتواند اثر مستقیمی بر سودآوری و رقابتپذیری سازمانها داشته باشد.
اما مشکل اینجاست که بسیاری از کارخانهها و مراکز توزیع هنوز در مرحلهی «گذار» از عملیات دستی به عملیات کاملاً خودکار هستند. در چنین محیطهایی، انسانها و رباتها باید همزمان و در یک فضای کاری مشترک فعالیت کنند — انسانی که تصمیم میگیرد، میبیند و انتخاب میکند، و رباتی که حمل، مسیر و زمان را بهینه میکند. این ترکیب در ظاهر ساده به نظر میرسد، اما از نظر مدیریتی و فنی یکی از پیچیدهترین معماهای صنعت مدرن است.
تحقیقات گذشته در زمینهی همکاری انسان و ربات (Human–Robot Collaboration) عمدتاً بر دو محور متمرکز بودهاند: ایمنی و کارایی. در محور ایمنی، پژوهشها روی فاصلهی بهینهی کاری، سرعت مجاز حرکت رباتها در نزدیکی کارگران و طراحی مسیرهای مشترک تمرکز داشتند. اما اغلب این مطالعات در محیطهای کنترلشدهی آزمایشگاهی انجام شدند و فاقد دادههای میدانی در مقیاس واقعی بودند. در محور کارایی نیز، بیشتر مطالعات فرض کردهاند که افزایش تعداد رباتها همیشه منجر به کاهش زمان پردازش و افزایش throughput میشود.
اما مقالهی حاضر دقیقاً در همین فرض رایج شکاف ایجاد میکند. نویسندگان با تحلیل دادههای واقعی از یک مرکز توزیع بزرگ اروپایی نشان دادهاند که رابطهی میان سطح اتوماسیون و کارایی، خطی یا صعودی نیست؛ بلکه غیرخطی و پویا است. آنها کشف کردند که از نقطهای به بعد، اضافه کردن رباتها نهتنها به بهبود منجر نمیشود، بلکه میتواند به افت عملکرد کل سیستم نیز بینجامد.
این یافته برخلاف نگاه سنتی Industry 4.0 است که اتوماسیون را همواره بهعنوان هدف نهایی میبیند. در واقع، مقاله پیام مهمی دارد: خودکارسازی بیشازحد بدون هماهنگی شناختی میان انسان و ربات، منجر به اصطکاک عملیاتی میشود. این اصطکاک نه ناشی از ضعف فناوری، بلکه ناشی از نبود طراحی سیستمی در تعامل انسان و ماشین است.
از نظر تئوریک، پژوهش حاضر بر پایهی رویکرد «System-Level Performance Analysis» است — یعنی بهجای تمرکز بر عملکرد یک ربات یا یک کارگر، کل سیستم را بهصورت ارگانیک بررسی میکند. این همان تفاوتی است که مطالعه را از پروژههای مهندسی جزئی متمایز میکند. مقاله از مدلسازی چندعاملی (Multi-Agent Analysis) و تحلیل تجربی دادههای عملیاتی استفاده کرده تا نشان دهد چگونه ازدحام، زمان انتظار و تعاملات مشترک میان انسان و ربات باعث تغییر عملکرد کلی سیستم میشوند.
از سوی دیگر، این پژوهش از منظر مدیریت تغییر در تحول دیجیتال (Digital Transformation Management) نیز ارزش دارد. زیرا بسیاری از سازمانها بدون تحلیل دقیق، مستقیماً بهسمت جایگزینی نیروی انسانی با ربات حرکت میکنند، در حالیکه این مقاله هشدار میدهد که بهترین بهرهوری دقیقاً در نقطهای میان انسان و ماشین اتفاق میافتد — نقطهای که در آن رباتها مکمل انسان هستند، نه جایگزین او.
در نتیجه، میتوان گفت مقالهی «We Belong Together» در واقع پاسخی است به یکی از پرسشهای کلیدی دنیای امروز لجستیک:
«چگونه میتوان همزمان از سرعت رباتها و درک انسانی استفاده کرد، بدون اینکه یکی مانع دیگری شود؟»
پاسخ مقاله روشن است: با طراحی سیستمهایی که سطح اتوماسیون را نه حداکثری، بلکه بهینه کنند. و این دقیقاً جایی است که ارزش واقعی همکاری انسان–ربات معنا پیدا میکند.
چالشهای اصلی در همکاری انسان–ربات در عملیات انتخاب سفارش
در ظاهر، حضور رباتهای حملبار خودکار در انبارها وعدهی سرعت، دقت و صرفهجویی در هزینه را میدهد، اما واقعیت میدانی پیچیدهتر از این تصورات است. در یک سیستم واقعی که هم انسان و هم ربات با هم کار میکنند، هر حرکت، توقف و تصمیم کوچک میتواند اثر زنجیرهای بر کل فرآیند داشته باشد. مقاله نشان میدهد که این هماهنگی بهشدت حساس به تراکم حرکتی، رفتار انسانی و محدودیتهای فیزیکی محیط است. به بیان سادهتر، وقتی تعداد رباتها زیاد میشود، نرخ برخوردهای احتمالی، توقفهای احتیاطی و تنگناهای عملیاتی بهصورت تصاعدی افزایش مییابد.
یکی از بزرگترین چالشها، ناهماهنگی ریتم کاری انسان و ربات است. انسانها بهصورت طبیعی رفتار نوسانی دارند — گاهی سرعت کار بالا میرود و گاهی برای تصمیمگیری یا کنترل کیفیت مکث میکنند. در مقابل، رباتها با الگوی حرکتی منظم و ثابت کار میکنند. این تفاوت ریتم باعث میشود در محیطهایی با تراکم بالا، رباتها مجبور به توقفهای مکرر یا مسیرهای انحرافی شوند تا از برخورد با کارگران جلوگیری کنند. هر توقف کوچک در یک ربات میتواند به توقف چند ربات دیگر در زنجیرهی حرکتی منجر شود و کل سیستم را کند کند.
چالش دوم، تضاد میان ایمنی و بهرهوری است. استانداردهای ایمنی در انبارهای انسان–ربات بسیار سختگیرانهاند. هر ربات باید هنگام نزدیک شدن به انسان، سرعت خود را کاهش دهد یا حتی متوقف شود. وقتی تعداد رباتها زیاد باشد، این رفتار احتیاطی منجر به ازدحام در نقاط تقاطع یا محدودههای کاری میشود. در نتیجه، سیستم بهصورت غیرمنتظرهای کندتر از زمانی میشود که رباتها کمتر بودند. بنابراین افزایش تعداد AGVها نهتنها بهینه نیست، بلکه ممکن است بهرهوری را کاهش دهد — همان چیزی که مقاله با دادههای واقعی اثبات کرده است.
چالش سوم به ساختار فیزیکی و طراحی مسیرها مربوط میشود. بسیاری از انبارها برای کار ترکیبی انسان و ربات طراحی نشدهاند. مسیرهای باریک، مناطق مشترک برداشت کالا، و نقاط کور باعث میشوند رباتها برای عبور ایمن نیاز به توقفهای متعدد داشته باشند. در چنین محیطهایی، با افزایش تعداد رباتها، نرخ توقفها بهصورت تصاعدی رشد میکند و زمان متوسط تکمیل مأموریت بالا میرود. نویسندگان مقاله نشان میدهند که در یک محیط واقعی، وقتی نسبت رباتها از حدود ۴۰٪ بیشتر شود، زمان تکمیل سفارشها به جای کاهش، شروع به افزایش میکند.
چالش دیگر، تعامل شناختی و هماهنگی تصمیمی میان انسان و ربات است. در بسیاری از سیستمهای نیمهخودکار، رباتها هنوز از دستورالعملهای از پیش تعریفشده پیروی میکنند و نمیتوانند رفتار انسان را درک یا پیشبینی کنند. در نتیجه، اگر یک کارگر تصمیم بگیرد ترتیب انجام مأموریت را تغییر دهد یا در مسیر متفاوتی حرکت کند، رباتها قادر به تطبیق فوری نیستند و باید منتظر دستور مرکزی بمانند. این وقفههای کوچک در مقیاس سیستم به تأخیر قابل توجهی منجر میشود. در مقابل، انسان نیز ممکن است حرکات رباتها را غیرقابل پیشبینی احساس کند و برای جلوگیری از برخورد، بیش از حد محتاط شود — در نتیجه بازدهی انسانی نیز کاهش مییابد.
چالش پنجم، تأثیر رفتار انسانی و بار شناختی (Cognitive Load) بر عملکرد کلی سیستم است. زمانیکه کارگران در کنار رباتها فعالیت میکنند، ذهن آنها دائماً بین وظایف خود و رصد حرکات رباتها در نوسان است. این نظارت ذهنی مداوم، تمرکز و دقت را کاهش داده و در بلندمدت باعث خستگی شناختی میشود. در محیطهای متراکم، کارگران گاهی بیشتر زمان خود را صرف اجتناب از رباتها میکنند تا تمرکز بر مأموریت اصلی برداشت سفارش.
در نهایت، مقاله به یک نکتهی ظریف اما حیاتی اشاره میکند: افزایش هوشمندی رباتها بدون هوشمندسازی سیستم، نتیجهای معکوس دارد. حتی پیشرفتهترین رباتها اگر در ساختار سیستمی غیرهماهنگ کار کنند، نمیتوانند کارایی کل را بالا ببرند. همانطور که نویسندگان بیان میکنند، عملکرد کلی نه توسط سریعترین عامل، بلکه توسط کندترین حلقهی زنجیره تعیین میشود — و این حلقه معمولاً همان تعامل انسان و ربات است.
در مجموع، یافتههای مقاله نشان میدهد که چالش اصلی صنعت امروز نه در فناوری رباتیک، بلکه در مدیریت سطح همزیستی میان انسان و ماشین است. یافتن نقطهی بهینهای که در آن تعداد رباتها، سرعت عملیات و تعامل انسانی در تعادل باشند، کلید موفقیت نسل آیندهی انبارهای هوشمند محسوب میشود.
روش پژوهش و طراحی آزمایش سیستم انسان–ربات
ویژگی منحصربهفرد مقاله در این است که بهجای تکیه بر شبیهسازی یا مدلهای فرضی، از دادههای واقعی یک مرکز لجستیکی بزرگ در آلمان استفاده کرده است. این مرکز از سیستم ترکیبی انسان و رباتهای حملبار خودکار (AGV) برای انجام فرآیند انتخاب سفارش (Order Picking) استفاده میکرد. محیط مورد مطالعه شامل دهها مسیر حرکتی، چند ایستگاه برداشت، و ترکیبی از کارگران انسانی و رباتها بود که در یک شبکهی مشترک فعالیت میکردند.
هدف پژوهش این بود که بفهمد افزایش تعداد AGVها چگونه بر عملکرد کل سیستم، زمان تکمیل سفارشها و بهرهوری انسانی تأثیر میگذارد. برای این منظور، نویسندگان از یک رویکرد تحلیلی چندمرحلهای استفاده کردند که در سه بخش اصلی طراحی شده بود: گردآوری دادههای عملیاتی، مدلسازی سطح سیستم، و تحلیل عملکرد بر اساس نسبتهای مختلف انسان–ربات.
در گام نخست، تیم پژوهش دادههای مربوط به ۱۴۰ هزار مأموریت برداشت سفارش را طی پنج ماه متوالی (از فوریه تا ژوئن ۲۰۲۳) جمعآوری کرد. هر مأموریت شامل اطلاعات دقیقی از زمان شروع، مدت انجام، نوع سفارش، فاصلهی طیشده، تعداد توقفها، زمان انتظار در مسیر، و تعامل با سایر رباتها بود. این دادهها بهصورت خودکار از سیستم کنترل مرکزی انبار استخراج شدند و پس از پالایش، وارد مدل تحلیلی شدند.
در گام دوم، برای بررسی رفتار کل سیستم، پژوهشگران یک مدل System-Level Performance Evaluation طراحی کردند. در این مدل، متغیر اصلی نسبت رباتها به کل نیروی کاری بود (Robot Share). آنها مقادیر مختلفی از این نسبت را شبیهسازی کردند — از کمتر از ۱۰٪ تا بیش از ۷۰٪ — تا روند تغییر کارایی سیستم را در طول طیف کامل اتوماسیون مشاهده کنند. هر سطح از اتوماسیون، شامل پارامترهایی مانند زمان مسیر، ازدحام در نقاط تقاطع، زمان انتظار انسانی، و تعاملات مشترک بود.
برای ارزیابی دقت مدل، دادههای میدانی واقعی با خروجی مدل تحلیلی مقایسه شدند. نتایج نشان داد که خطای پیشبینی مدل کمتر از ۵٪ است، که برای تحلیلهای سیستمهای واقعی عددی بسیار دقیق محسوب میشود. این اعتبارسنجی به پژوهشگران اجازه داد تا از مدل برای کشف الگوهای بهینه استفاده کنند.
در مرحلهی سوم، برای تحلیل رفتار پویا، نویسندگان از تحلیل واریانس سیستماتیک (Systematic ANOVA) و تحلیل منحنی عملکرد (Performance Curve Fitting) استفاده کردند تا رابطهی میان تعداد رباتها و سرعت انجام مأموریتها را تعیین کنند. خروجی این تحلیلها منجر به کشف یک رابطهی غیرخطی شد که شکل منحنی U داشت — بدین معنا که عملکرد ابتدا با افزایش تعداد رباتها بهبود مییابد، اما پس از عبور از نقطهی بهینه (حدود ۳۹٪)، دوباره شروع به کاهش میکند.
اما نقطهی قوت اصلی روش پژوهش در نگاه کلنگر آن است. برخلاف مطالعات پیشین که فقط روی یک جنبهی عملکرد (مثل سرعت یا مصرف انرژی) تمرکز میکردند، این مقاله تمام ابعاد را با هم دیده است — از جمله بهرهوری انسانی، تعاملات مشترک، نرخ توقف، و تأثیر ازدحام مسیرها. در نتیجه، تحلیلها نهتنها از نظر آماری معتبر، بلکه از نظر مدیریتی نیز کاربردی هستند.
برای مثال، زمانی که نسبت رباتها از ۲۰٪ به ۴۰٪ افزایش یافت، بهرهوری کلی انبار حدود ۳۰٪ بالا رفت. اما با عبور از ۴۰٪، افزایش تعداد رباتها باعث افزایش چشمگیر زمانهای انتظار شد، زیرا مسیرها بیش از حد اشباع میشدند و رباتها برای رعایت فاصلهی ایمنی از انسانها ناچار به توقفهای مکرر بودند. این اثر زنجیرهای در مدل کاملاً ثبت شد و در دادههای واقعی نیز تأیید گردید.
از نظر فنی، سیستم مورد آزمایش از نوع AGV ناوبری هوشمند با مسیرهای نیمهثابت (Hybrid Path Planning) بود. یعنی رباتها از مسیرهای اصلی ثابت برای حرکت استفاده میکردند، اما میتوانستند در صورت شناسایی مانع یا تراکم، مسیر جایگزین را انتخاب کنند. این طراحی باعث شد رفتار سیستم به واقعیت نزدیکتر باشد، زیرا در اکثر انبارهای واقعی نیز مسیرهای رباتها کاملاً آزاد یا کاملاً محدود نیستند، بلکه ترکیبی از هر دو حالتاند.
در مجموع، روش پژوهش بر پایهی دادههای واقعی، مدلسازی ریاضی، و تحلیل چندسطحی بنا شده است — ترکیبی که کمتر در مطالعات صنعتی دیده میشود. به همین دلیل نتایج مقاله نه فقط از نظر علمی، بلکه از نظر تصمیمسازی مدیریتی نیز قابل استناد هستند.
در واقع، این پژوهش نشان داد که برای تحلیل عملکرد سیستمهای انسان–ربات، باید از دید کلسیستم به مسئله نگاه کرد؛ زیرا تصمیمهایی که در ظاهر کوچک به نظر میرسند (مثل افزایش چند ربات یا تغییر چیدمان مسیر)، میتوانند در مقیاس سیستم اثرات غیرخطی و حتی معکوس ایجاد کنند.
نتایج کلیدی و کشف نقطهی بهینهی همکاری انسان–ربات
تحلیل دادههای واقعی و مدلسازی سیستم در مقاله، یک یافتهی بنیادی را آشکار کرد: رابطهی میان سطح اتوماسیون (نسبت رباتها به کل عوامل) و عملکرد سیستم غیرخطی است و شکل آن دقیقاً مانند یک منحنی U معکوس (Inverted U-shaped Curve) دیده میشود.
در ابتدا با افزایش تعداد رباتهای حملبار، کارایی سیستم رشد چشمگیری پیدا میکند، اما پس از عبور از یک نقطهی بحرانی، افزایش بیشتر رباتها نهتنها بهبود ایجاد نمیکند، بلکه باعث افت عملکرد میشود.
در بخش نخست منحنی، از صفر تا حدود ۳۰٪ سهم ربات، عملکرد بهصورت تقریباً خطی افزایش مییابد. در این ناحیه، رباتها بخش عمدهای از وظایف حمل فیزیکی را بر عهده میگیرند و بار کاری انسان کاهش مییابد. در نتیجه، زمان متوسط برداشت سفارش تا حدود ۲۵٪ کاهش مییابد و بهرهوری نیروی انسانی افزایش پیدا میکند. علاوه بر این، نرخ خطا در حمل نیز بهطور محسوسی کمتر میشود زیرا رباتها در مسیرهای ثابت و با خطای ناوبری بسیار پایین کار میکنند.
اما در ناحیهی دوم منحنی، یعنی زمانی که نسبت رباتها از حدود ۳۵ تا ۴۰ درصد عبور میکند، روند بهینهسازی متوقف میشود. سیستم به نقطهی اشباع نزدیک میشود — جایی که مسیرهای حرکتی، نقاط برداشت و ایستگاههای بارگیری شروع به تداخل عملیاتی میکنند. به بیان دیگر، تعداد زیاد رباتها موجب تراکم حرکتی در بخشهای مشترک با انسان میشود و عملکرد کل سیستم دچار افت میگردد. دادهها نشان میدهند که با افزایش سهم رباتها از ۴۰ به ۶۰ درصد، میانگین زمان مأموریت تا ۱۸٪ افزایش یافته و نرخ توقف در مسیرها تقریباً دو برابر شده است.
تحلیلهای تکمیلی نشان دادند که دلیل اصلی این افت عملکرد، رفتار احتیاطی خودکار در الگوریتمهای کنترل ایمنی است. هر ربات موظف است هنگام تشخیص حضور انسان یا ربات دیگر، سرعت خود را کاهش دهد یا توقف کند. وقتی تعداد رباتها زیاد شود، احتمال تقاطع مسیرها بهشدت بالا میرود و این منطق ایمنی منجر به توقفهای زنجیرهای (Cascade Stopping Effect) میشود.
نتیجه آن است که، در شرایطی با تراکم بالا، رباتها بخش قابلتوجهی از زمان خود را نه صرف حرکت مؤثر، بلکه صرف انتظار برای آزاد شدن مسیر میکنند.
یکی دیگر از نتایج کلیدی مربوط به تأثیر نسبت رباتها بر کارایی نیروی انسانی بود. تا قبل از نقطهی بهینه، حضور رباتها باعث کاهش خستگی و افزایش تمرکز اپراتورهای انسانی شد. اما با افزایش بیشازحد رباتها، وضعیت برعکس شد. کارگران انسانی گزارش کردند که فشار شناختی آنها برای نظارت بر حرکات رباتها و هماهنگی با مسیرهای متغیر افزایش یافته است. این پدیده که در روانشناسی صنعتی به آن Automation Overload گفته میشود، منجر به افت بهرهوری انسانی و افزایش خطاهای شناختی میشود.
مقاله با استفاده از مدل تحلیلی چندعاملی، نقطهی بهینهی عملکرد کل سیستم را حدود ۳۹٪ نسبت ربات به کل عوامل عملیاتی برآورد کرده است. در این نقطه، هم نرخ توقف پایین است، هم زمان مأموریت حداقل، و هم تعامل انسان و ربات بهصورت روان انجام میشود. در مقادیر کمتر از این، ظرفیت رباتها بهدرستی استفاده نمیشود، و در مقادیر بالاتر از آن، ازدحام و افت هماهنگی افزایش مییابد.
نتیجهی کلیدی دیگر مربوط به رفتار پویا در ساعات مختلف کاری است. در ساعات اوج عملیات (Peak Hours)، تأثیر افزایش رباتها بر افت عملکرد شدیدتر است؛ زیرا در این ساعات، حجم مأموریتها بالا و مسیرها اشباع هستند. در مقابل، در ساعات خلوت، سهم بالاتر رباتها عملکرد بهتری دارد چون ازدحام کمتر است. این یافته نشان میدهد که نسبت بهینهی رباتها باید پویا و وابسته به زمان عملیاتی تنظیم شود — نه عددی ثابت.
تحلیل نهایی نویسندگان بر مبنای شاخص «System Throughput per Labor Unit» (بهرهوری کل سیستم به ازای هر نیروی انسانی) انجام شد. بر اساس دادههای واقعی، این شاخص در نسبت حدود ۳۹٪ به حداکثر مقدار خود رسید و پس از آن بهتدریج کاهش یافت. در نقطهی ۶۵٪، بهرهوری کل به سطحی نزدیک به همان حالت اولیهی پیش از اتوماسیون برگشت، که نشان میدهد افزایش افراطی رباتها میتواند عملاً دستاورد اتوماسیون را خنثی کند.
در کنار نتایج کمی، مقاله چند مشاهدهی کیفی نیز ارائه میدهد. برای مثال، اپراتورهای انسانی در محیطهای با تراکم بالای رباتها، حس کنترل کمتر و اضطراب بالاتری گزارش کردند. این احساس ذهنی باعث شد در عمل سرعت برداشت آنها کاهش یابد، حتی اگر سیستم از نظر عددی بهینه به نظر میرسید. این بخش از نتایج اهمیت روانشناسی صنعتی در طراحی همکاری انسان–ربات را برجسته میکند.
در مجموع، یافتههای مقاله تأیید میکنند که بهرهوری واقعی در سیستمهای انسان–ربات زمانی حاصل میشود که تعداد AGVها نه به حداکثر، بلکه به مقدار بهینهی سیستمی برسد. این بهینهسازی باید پویا، مبتنی بر داده و هماهنگ با رفتار انسانی طراحی شود — نه صرفاً بر اساس توان فنی رباتها.
کاربردهای صنعتی و پیامدهای مدیریتی
یافتههای این مقاله از سطح تحلیل داده و مدل ریاضی فراتر میرن و به تصمیمهای واقعی در طراحی و بهرهبرداری از انبارهای هوشمند جهت میدن. در حقیقت، مفهوم نقطهی بهینهی همکاری انسان–ربات (Optimal Human–Robot Collaboration Ratio) بهعنوان یکی از شاخصهای کلیدی طراحی لجستیک آینده معرفی میشه — شاخصی که میتونه تعیینکنندهی نحوهی سرمایهگذاری، چیدمان خطوط کاری، و حتی برنامهریزی نیروی انسانی در دههی آینده باشه.
در نخستین سطح، این یافتهها برای شرکتهایی که در مسیر گذار از انبارهای دستی به سیستمهای نیمهخودکار قرار دارند، اهمیت راهبردی دارد. در بسیاری از پروژههای صنعتی، تصمیمگیران تمایل دارند برای افزایش بهرهوری، هرچه سریعتر تعداد رباتها را افزایش دهند. اما دادههای این مقاله نشان میدهد که افزودن بیشازحد رباتها بدون طراحی سیستماتیک میتواند اثر معکوس داشته باشد.
برای مثال، شرکتی که بدون تحلیل سیستم، تعداد AGVها را دو برابر میکند، ممکن است شاهد افزایش زمان تحویل سفارشها شود؛ زیرا ازدحام حرکتی، توقفهای ایمنی و پیچیدگی تصمیمگیری انسانی رشد میکنند. از اینرو، مقاله توصیه میکند قبل از خرید یا گسترش ناوگان رباتها، شبیهسازی سطح سیستم (System-Level Simulation) انجام شود تا نسبت دقیق و بهینه تعیین گردد.
در سطح دوم، یافتهها نشان میدهند که بهرهوری کلی سیستم بیشتر تابع هماهنگی و طراحی رفتاری است تا توان سختافزاری رباتها. به بیان دیگر، حتی پیشرفتهترین رباتها اگر در ساختاری ناسازگار با انسانها فعالیت کنند، نمیتوانند کارایی مطلوبی ارائه دهند. در مقابل، سیستمهایی که با اصول تعامل شناختی انسان–ربات (Human–Robot Cognitive Coordination) طراحی میشوند، میتوانند با تعداد کمتری از رباتها به سطح بالاتری از بهرهوری برسند.
این بینش میتواند هزینههای سرمایهگذاری در رباتیک را تا چند میلیون دلار در پروژههای بزرگ کاهش دهد و در عین حال کیفیت عملکرد را افزایش دهد.
در سطح سوم، یافتههای مقاله تأکید میکنند که مدیریت ترافیک میانرباتی و انسانی (Hybrid Flow Control) باید بهصورت پویا و زمانبندیشده انجام شود. نسبت بهینهی ۳۹٪ که در مقاله شناسایی شده، یک میانگین کلی است، اما در ساعات اوج یا شرایط خاص محیطی باید بهطور تطبیقی تنظیم شود. این مفهوم میتونه در طراحی سیستمهای مدیریتی آینده (Warehouse Execution Systems – WES) لحاظ بشه؛ به این معنا که سامانه بهصورت خودکار بتواند سهم مأموریتهای انسانی و رباتیکی را در طول روز متناسب با تراکم، حجم سفارش و وضعیت مسیر تنظیم کند.
از منظر طراحی فیزیکی انبار، این پژوهش پیشنهاد میکند که چیدمان فضایی و مسیرهای حرکتی باید بر اساس تراکم ترکیبی انسان–ربات بهینه شوند، نه صرفاً بر اساس مسیر کوتاهتر یا نزدیکترین ایستگاه. بهعبارت دیگر، انبارهای نسل آینده باید با «معماری تعاملی» طراحی شوند؛ فضایی که حرکت روان، دید متقابل، و امکان عبور بدون توقف میان انسان و ربات فراهم کند.
برای نمونه، مسیرهای موازی با عرضهای متفاوت، یا ایجاد مناطق امن پویا (Dynamic Safety Zones) میتوانند تراکم حرکتی را کنترل کرده و در همان نسبت بهینه عملکرد را حفظ کنند.
در سطح مدیریتی، یکی از مهمترین پیامدهای این تحقیق مربوط به برنامهریزی نیروی انسانی در محیطهای خودکار است. بسیاری از مدیران تصور میکنند که افزایش رباتها به معنی کاهش نیاز به نیروی انسانی است، اما مقاله نشان میدهد که در عمل، نقش انسان نهتنها حذف نمیشود بلکه تغییر ماهیت میدهد. انسانها از عاملهای اجرایی به عاملهای نظارتی، تصمیمگیر و هماهنگکننده تبدیل میشوند. این تحول نیازمند بازآموزی (Reskilling) نیروی کار و طراحی مجدد فرآیندهای آموزشی است تا کارکنان بتوانند در محیطهای هوشمند بهصورت ایمن و کارآمد کار کنند.
از سوی دیگر، یافتهها در حوزهی طراحی سیاستهای سرمایهگذاری در اتوماسیون صنعتی نیز اهمیت دارند. مدل اقتصادی مقاله نشان میدهد که بازده سرمایهگذاری (ROI) در سیستمهای رباتیکی بهشدت وابسته به یافتن نقطهی بهینهی اتوماسیون است. در نسبتهای پایین، هزینهی نگهداری نیروی انسانی بالاست؛ و در نسبتهای خیلی بالا، هزینههای ترافیکی و افت عملکرد باعث کاهش بازده میشود. در نتیجه، تنها در نقطهی میانی است که هزینه و بهرهوری در تعادل قرار میگیرند. این تحلیل برای مدیران مالی و سرمایهگذاران بخش لجستیک راهنمای عملی ارزشمندی محسوب میشود.
در نهایت، یکی از کاربردهای جذاب این یافتهها در توسعهی سیستمهای هوش مصنوعی پیشبینیکننده (Predictive AI for Workforce–Robot Balance) است. میتوان الگوریتمهایی طراحی کرد که با تحلیل بلادرنگ از دادههای انبار (تعداد سفارش، سرعت رباتها، مسیرها و نرخ ترافیک)، نسبت بهینهی همکاری را در هر ساعت روز تخمین بزنند و به سیستم کنترل مرکزی پیشنهاد دهند. این مفهوم بهنوعی شکل ابتدایی «مدیریت تطبیقی ترکیب انسان–ربات» را به واقعیت نزدیک میکند — چیزی که در آیندهی نزدیک به استاندارد اصلی لجستیک هوشمند تبدیل خواهد شد.
در جمعبندی، یافتههای مقاله تنها یک نتیجهی آماری نیستند، بلکه نقشهی راهی برای طراحی، مدیریت و توسعهی انبارهای نسل آیندهاند. صنعتی که بر اساس درک تعاملی از رفتار انسان و ربات ساخته شود، نهتنها بهرهورتر و سریعتر خواهد بود، بلکه ایمنتر، پایدارتر و از نظر انسانی رضایتبخشتر است.
جمعبندی استراتژیک و مزیتهای رقابتی
در جهان رقابتی امروز، اتوماسیون دیگر یک انتخاب نیست بلکه ضرورتی حیاتی برای بقا و رشد سازمانهاست. با این حال، مسیر تحول دیجیتال تنها برای سازمانهایی موفقیتآمیز است که بتوانند میان فناوری و انسان تعادل برقرار کنند. یافتههای مقالهی «We Belong Together» دقیقاً بر همین نقطهی استراتژیک تأکید دارد: موفقیت در لجستیک آینده نه با بیشترین میزان اتوماسیون، بلکه با هوشمندانهترین سطح همکاری میان انسان و ربات به دست میآید.
از دید استراتژیک، این نتیجهگیری یک تغییر پارادایم مهم است. در مدلهای سنتی تحول دیجیتال، هدف همیشه افزایش تعداد رباتها و کاهش نیروی انسانی بود. اما این مقاله نشان میدهد که چنین تفکری میتواند منجر به کاهش بازده، افت عملکرد و حتی بیثباتی سیستم شود. بنابراین، نگاه جدید باید بر مفهوم اتوماسیون بهینه (Optimal Automation) متمرکز باشد، نه اتوماسیون مطلق. سازمانهایی که این دیدگاه را درک کنند، میتوانند منابع خود را بهصورت هدفمند به حوزههایی تخصیص دهند که بیشترین ارزش افزوده را ایجاد میکنند — جایی که رباتها بار فیزیکی را بر دوش میکشند و انسانها بار شناختی و تصمیمسازی را.
یکی از مزیتهای رقابتی کلیدی در این رویکرد، انعطافپذیری شناختی سازمانی (Cognitive Flexibility) است. شرکتهایی که بهجای تکیه بر کنترل متمرکز، از مدلهای ترکیبی انسان–ربات استفاده میکنند، قادرند به تغییرات بازار، حجم سفارشها و نوسانات زنجیرهی تأمین با سرعت بیشتری واکنش نشان دهند. این نوع انعطافپذیری بهویژه در صنایع پرنوسان مانند خردهفروشی آنلاین یا لجستیک دارویی، مزیتی تعیینکننده محسوب میشود.
مزیت دوم، پایداری عملیاتی (Operational Sustainability) است. زمانیکه نسبت انسان و ربات در نقطهی بهینه تنظیم میشود، مصرف انرژی، سایش مکانیکی، و فشار کاری انسانی در تعادل قرار میگیرند. این ترکیب متعادل نهتنها عمر تجهیزات را افزایش میدهد بلکه احتمال خطای انسانی و فنی را کاهش میدهد. بهعبارت دیگر، سیستمهایی که با همکاری متقابل انسان و ربات اداره میشوند، کمتر دچار شوکهای عملیاتی و توقفهای غیرمنتظره میگردند.
از منظر منابع انسانی، مزیت سوم در تحول نقش انسان در ساختار صنعتی نهفته است. در گذشته، ورود رباتها تهدیدی برای نیروی انسانی تلقی میشد؛ اما یافتههای این مقاله نشان میدهد که در ساختارهای هوشمند، انسان به عنصر راهبردی تبدیل میشود — بهعنوان ناظر شناختی، تحلیلگر فرآیند و هماهنگکنندهی تصمیمها. این تحول باعث میشود سازمانها بتوانند از تجربه و درک انسانی در کنار قدرت محاسباتی رباتها استفاده کنند، چیزی که نتیجهاش هم بهرهوری بالاتر است و هم رضایت شغلی بیشتر.
مزیت چهارم در مدیریت داده و بینش تصمیممحور (Data-Driven Intelligence) ظاهر میشود. در سیستمهای ترکیبی، حجم عظیمی از دادههای تعاملی میان انسان و ربات ایجاد میشود؛ دادههایی که میتوانند برای تحلیل روندها، بهینهسازی مسیرها و پیشبینی نیازهای آینده مورد استفاده قرار گیرند. سازمانهایی که این دادهها را بهدرستی استخراج و تحلیل کنند، به بینشهایی دست مییابند که مزیت رقابتی پایداری ایجاد میکند — بینشی که نه در فناوری، بلکه در فهم رفتار سیستم نهفته است.
از نظر استراتژیک، این یافتهها پیام روشنی برای رهبران صنعتی دارند: آینده متعلق به سازمانهایی است که بتوانند میان هوش فیزیکی ماشین و هوش شناختی انسان همافزایی ایجاد کنند. این همافزایی همان نیروی محرکهی نسل بعدی صنعت است؛ صنعتی که نه فقط خودکار، بلکه خودفهم و خودبهینهساز است.
همچنین، رویکرد مطرحشده در مقاله مبنایی برای توسعهی سیاستهای «اتوماسیون تطبیقی (Adaptive Automation)» فراهم میکند. در این سیاست، سطح استفاده از رباتها بهصورت پویا و بلادرنگ تغییر میکند؛ مثلاً در ساعات اوج کاری سهم رباتها افزایش مییابد و در ساعات کمکار، وظایف بیشتری به انسانها واگذار میشود. چنین مدلی میتواند تا ۲۰٪ بهرهوری عملیاتی را بدون افزایش سرمایهگذاری سختافزاری ارتقا دهد — مزیتی که در شرایط رقابتی جهانی، یک برتری واقعی محسوب میشود.
در نهایت، از منظر کلان اقتصادی، این نوع همکاری هوشمند انسان–ربات راهی برای افزایش تابآوری زنجیرههای تأمین جهانی (Supply Chain Resilience) نیز هست. وقتی سیستمها صرفاً ماشینی باشند، هر اختلال در بخش سختافزار یا شبکه میتواند کل عملیات را متوقف کند. اما در ساختارهای ترکیبی، انسانها قادرند در شرایط غیرعادی کنترل را در دست بگیرند و از بحران عبور دهند. این خاصیت انعطاف انسانی در کنار پایداری ماشینی، ترکیبی بیبدیل برای بقا در اقتصاد دیجیتال محسوب میشود.
در جمعبندی این بخش، میتوان گفت مزیت رقابتی آینده نه در تعداد رباتها، بلکه در کیفیت همکاری آنها با انسانهاست. سازمانهایی که این همکاری را در قالب طراحی سیستماتیک، یادگیری مداوم و تحلیل داده نهادینه کنند، در واقع به شکلگیری صنعتی کمک خواهند کرد که در آن انسان و ماشین نه رقیب، بلکه شریک استراتژیک در تصمیمسازی و خلق ارزش هستند.
نتیجهگیری نهایی
نتایج مقالهی «We Belong Together» تصویری تازه و واقعگرایانه از آیندهی لجستیک هوشمند ارائه میدهد. برخلاف تصور عمومی که اتوماسیون را مترادف با حذف کامل انسان از فرآیند میداند، این پژوهش نشان میدهد که انسان و ربات در بهترین حالت، زمانی بیشترین بهرهوری را دارند که با هم کار کنند، نه بهجای هم. سیستمهای لجستیکی موفق آینده، آنهایی خواهند بود که بتوانند تعادل پویا و هوشمندانهای میان ظرفیت انسانی و ظرفیت رباتیکی ایجاد کنند؛ تعادلی که نه بر اساس احساس، بلکه بر پایهی داده و تحلیل شکل میگیرد.
تحلیلهای دقیق مقاله ثابت کرد که افزایش بیرویهی رباتها لزوماً منجر به بهبود عملکرد نمیشود. پس از نقطهای خاص — حدود ۳۹٪ سهم رباتها — تداخل مسیرها، افزایش توقفهای ایمنی و فشار شناختی بر اپراتورها باعث افت کلی کارایی میشود. این یافتهی تجربی، یک پیام بنیادین برای صنعت دارد: اتوماسیون بهینه مهمتر از اتوماسیون کامل است. طراحی سیستم باید بر ایجاد همافزایی میان انسان و ربات متمرکز باشد، نه جایگزینی یکی با دیگری.
از دید مدیریتی، مفهوم «تعادل عملکردی انسان–ربات» باید به یکی از شاخصهای کلیدی طراحی انبارها و کارخانههای آینده تبدیل شود. مدیران صنعتی باید بیاموزند که کارایی واقعی از همکاری زنده میان تصمیم انسانی و قدرت محاسباتی ربات حاصل میشود. رباتها باید از بار فیزیکی بکاهند تا انسانها بتوانند بر تصمیم، تحلیل و کنترل تمرکز کنند. در این مدل جدید، انسان رهبر هوش، و ربات مجری هوشمندی است.
همچنین این پژوهش هشدار میدهد که طراحی نادرست سیستمهای خودکار میتواند نهتنها بازده را کاهش دهد، بلکه خطرات جدیدی نیز ایجاد کند؛ از جمله ازدحام حرکتی، خستگی ذهنی کارگران و افزایش هزینههای پنهان نگهداری. بنابراین، گام نخست هر پروژهی اتوماسیون نباید خرید ربات، بلکه طراحی همزیستی سیستماتیک انسان و ربات باشد.
در سطح کلانتر، یافتههای مقاله راه را برای توسعهی نسل جدیدی از ابزارهای مدیریتی باز میکند — سیستمهایی که بتوانند بهصورت بلادرنگ نسبت همکاری انسان–ربات را تنظیم کنند. در آیندهی نزدیک، نرمافزارهای مدیریتی لجستیک (WMS و WES) باید بتوانند از دادههای لحظهای استفاده کنند تا در هر ساعت روز، تعداد بهینهی رباتها را در عملیات فعال نگه دارند و در زمانهای خلوت بخشی از مأموریتها را به انسانها بسپارند. این رویکرد که به «اتوماسیون تطبیقی» معروف است، گام بعدی صنعت ۵.۰ خواهد بود؛ صنعتی که در آن فناوری و انسان به شکل یک اکوسیستم هوشمند و خودسازمانیافته عمل میکنند.
دعوت به اقدام
اکنون زمان آن رسیده است که شرکتهای لجستیکی، تولیدکنندگان صنعتی و طراحان انبار نگاه خود را از «افزایش صرف رباتها» به سمت «افزایش تعامل هوشمند» تغییر دهند. پیشنهاد میشود پیش از اجرای هر پروژهی خودکارسازی، سه مرحلهی کلیدی دنبال شود:
۱. تحلیل سیستماتیک رفتار انسان–ربات در محیط واقعی، برای درک الگوی حرکتی و تعامل شناختی میان آنها.
۲. شبیهسازی سطح سیستم (Digital Twin Simulation) برای یافتن نسبت بهینهی رباتها و پیشبینی نقاط اشباع حرکتی.
۳. پیادهسازی تدریجی با بازخورد دادهای، تا سیستم بتواند بر اساس تجربهی واقعی یاد بگیرد و تنظیم شود.
برای مدیران و تصمیمگیران، این پژوهش یادآور یک اصل ساده اما حیاتی است: موفقیت دیجیتالی فقط با فناوری حاصل نمیشود، بلکه با طراحی هوشمند رابطهی میان انسان و فناوری ساخته میشود. آنچه بهرهوری را تضمین میکند، نه تعداد رباتها، بلکه میزان درک متقابل آنها با انسانهاست.
پیام پایانی
در عصر جدید صنعت، انسان و ربات «رقیب» نیستند؛ بلکه دو نیمهی یک سیستم هوشمندند. رباتها سرعت و دقت را به ارمغان میآورند، و انسانها قضاوت، خلاقیت و سازگاری را. زمانیکه این دو نیمه به تعادل برسند، صنعت از مرحلهی اتوماسیون صرف عبور میکند و وارد مرحلهی «همزیستی شناختی» میشود — صنعتی که در آن ماشین میاندیشد، انسان هدایت میکند، و هر دو با هم آینده را میسازند.
رفرنس مقاله
Andreas Lödding, Martin Herter, and Jens Marx,
“We Belong Together – A System-Level Investigation Regarding AGV-Assisted Order Picking Performance,”
International Journal of Production Economics, vol. 259, 2025, pp. 122–136.*
DOI: 10.1016/j.ijpe.2025.108985



{kind=link}
بدون نظر