

برنامهریزی هوشمند مسیر رباتهای متحرک با PSO تطبیقی: گام تازهای در ناوبری خودکار مقاوم
در دنیای امروز، رباتهای متحرک دیگر فقط ابزارهایی برای جابهجایی ساده نیستند؛ آنها تبدیل به بازیگران اصلی در زیرساختهای هوشمند و کارخانههای نسل جدید شدهاند. از رباتهای حمل پالت در انبارهای بزرگ گرفته تا ناوگانهای خودران در بنادر و رباتهای بازرسی در نیروگاهها، همگی برای انجام مأموریت خود نیازمند چیزی فراتر از یک مسیر ثابتاند — آنها به «ناوبری هوشمند» نیاز دارند. در چنین محیطهایی، چالش اصلی تنها یافتن کوتاهترین مسیر نیست، بلکه یافتن مسیری امن، پایدار و مقاوم در برابر تغییرات محیطی است.
در شرایط واقعی، مسیر حرکت رباتها هرگز یکنواخت و قابل پیشبینی نیست. موانع متحرک، تغییرات ناگهانی در نقشهی محیط، خطای حسگرها، و حتی لغزش چرخها میتواند مسیر بهینهی از پیش برنامهریزیشده را بیاثر کند. در این فضا، دیگر روشهای سنتی ناوبری پاسخگو نیستند، زیرا آنها تنها در محیطهای ایستا و ایدهآل عملکرد مطلوبی دارند. صنعت امروز به الگوریتمهایی نیاز دارد که بتوانند بهصورت تطبیقی، در لحظه تصمیم بگیرند و خود را با واقعیتهای محیط هماهنگ کنند.
در همین راستا، الگوریتمهای هوش ازدحامی بهویژه Particle Swarm Optimization (PSO)، طی دو دههی گذشته بهعنوان یکی از روشهای کارآمد برای برنامهریزی مسیر شناخته شدهاند. PSO با الهام از رفتار اجتماعی پرندگان، بر اساس اشتراک اطلاعات میان اعضای یک گروه عمل میکند؛ هر ذره (یا ربات) با مشاهدهی تجربهی خود و دیگران، بهترین مسیر را میآموزد. اما نسخهی کلاسیک این الگوریتم با محدودیتهایی جدی مواجه است. در محیطهای پویا، PSO معمولاً در یک نقطهی بهینهی محلی گیر میکند و قادر نیست مسیر خود را اصلاح کند. همچنین حساسیت زیاد آن به تنظیم پارامترها (مثل وزن اینرسی و ضرایب یادگیری) باعث میشود پایداری و دقت مسیر در عمل کاهش یابد.
در مقالهی حاضر، پژوهشگران با معرفی نسخهای پیشرفته از این الگوریتم با نام Smart Adaptive PSO (SAPSO) یا همان PSO تطبیقی هوشمند، گامی بلند برای حل این چالشها برداشتهاند. این نسخه از الگوریتم با قابلیت تنظیم پویا و هوشمند پارامترها، قادر است در لحظه ساختار حرکتی خود را تغییر دهد. به عبارت ساده، ربات دیگر تنها بر اساس دادههای گذشته تصمیم نمیگیرد؛ بلکه با تحلیل رفتار فعلی خود و همتیمیهایش، تشخیص میدهد چه زمانی باید اکتشاف بیشتری انجام دهد و چه زمانی باید روی مسیر فعلی تمرکز کند.
نتیجهی این هوشمندی، ایجاد ناوبری مقاوم (Robust Navigation) است — یعنی ربات میتواند مسیر خود را حتی در حضور نویز، موانع غیرمنتظره و تغییر شکل محیط حفظ کند. در واقع، این مقاله نشان میدهد که PSO دیگر صرفاً یک ابزار محاسباتی نیست، بلکه میتواند به یک چارچوب تصمیمگیری زنده و پویا برای رباتهای خودران صنعتی تبدیل شود.
اهمیت این دستاورد زمانی آشکار میشود که به کاربردهای آن در محیطهای واقعی نگاه کنیم. در یک انبار بزرگ، جایی که دهها ربات حملونقل در حال کارند، تغییر لحظهای مسیرها میتواند از تصادم جلوگیری کرده و بهرهوری کل سیستم را افزایش دهد. در عملیات نجات یا رباتهای امدادی، ربات باید بتواند در زمینهای ناشناخته مسیر خود را در لحظه بازسازی کند. در صنایع خودروسازی یا خطوط تولید ماژولار، سیستمهای رباتیک باید بهصورت همزمان با تغییرات خط تولید سازگار شوند. در تمام این موارد، وجود یک الگوریتم هوشمند و مقاوم مانند PSO تطبیقی، تفاوت میان توقف خط تولید و عملکرد بینقص است.
از دید صنعتی، این مقاله نهفقط یک مدل محاسباتی بلکه چارچوبی برای تفکر جدید در ناوبری خودکار ارائه میدهد؛ چارچوبی که در آن رباتها میآموزند چگونه در دنیای واقعی حرکت کنند، تصمیم بگیرند و حتی اشتباهات خود را اصلاح نمایند. با این رویکرد، ناوبری از یک فرآیند برنامهریزیشدهی خشک به یک فرآیند یادگیرنده و مقاوم تبدیل میشود — نقطهی تلاقی میان مهندسی کنترل، یادگیری ماشین و هوش جمعی.
چالشهای اصلی در مسیریابی خودکار و محدودیتهای نسخههای سنتی PSO
۱. ناوبری در محیطهای واقعی: از شبیهسازی تا میدان عمل
در نگاه اول، مسیریابی خودکار شاید شبیه به حل یک مسئلهی هندسی ساده به نظر برسد؛ اما در محیط واقعی، شرایط بسیار پیچیدهتر است. رباتها باید نهتنها کوتاهترین مسیر را پیدا کنند، بلکه بتوانند در مسیر حرکت به موانع، تغییرات ناگهانی و خطاهای اندازهگیری واکنش نشان دهند. در دنیای واقعی، هیچ نقشهای کامل نیست و هیچ محیطی ایستا باقی نمیماند. به همین دلیل، چالش اصلی در ناوبری خودکار نه یافتن یک مسیر بهینهی ثابت، بلکه پایداری مسیر در شرایط پویا و غیرقابل پیشبینی است.
در بسیاری از کاربردهای صنعتی، مانند انبارهای هوشمند یا خطوط تولید خودکار، تغییر مکان تجهیزات یا ورود ناگهانی رباتهای جدید میتواند مسیرهای از پیش محاسبهشده را بیاثر کند. بنابراین، ربات باید در لحظه تصمیم بگیرد و مسیر خود را بازسازی کند. الگوریتمهای سنتی مبتنی بر نقشهبرداری استاتیک یا برنامهریزی از پیش تعیینشده، توانایی واکنش به چنین تغییراتی را ندارند.
۲. محدودیتهای نسخهی کلاسیک PSO در کاربردهای رباتیکی
الگوریتم PSO کلاسیک یکی از قدرتمندترین روشهای بهینهسازی در فضاهای جستوجوی عددی است، اما در انتقال آن به دنیای فیزیکی رباتها مشکلاتی اساسی وجود دارد.
در PSO استاندارد، هر ذره بر اساس موقعیت فعلی خود، بهترین تجربهی شخصی و بهترین تجربهی گروهی مسیر حرکتش را تنظیم میکند. این روش در فضای مجازی عالی عمل میکند، اما در محیط واقعی رباتها با چند مانع جدی روبهرو است:
گیر افتادن در نقاط بهینهی محلی: وقتی محیط شامل موانع یا ناهمواریهای زیاد باشد، الگوریتم کلاسیک PSO بهسادگی در یک نقطهی ظاهراً مناسب متوقف میشود و دیگر قادر به جستوجوی گزینههای بهتر نیست. در ناوبری واقعی، این معادل رباتی است که در گوشهای گیر میکند و نمیتواند مسیر خود را اصلاح کند.
حساسیت بالا به پارامترها: عملکرد PSO شدیداً به انتخاب پارامترهایی مثل وزن اینرسی و ضرایب یادگیری بستگی دارد. اگر این مقادیر برای شرایط خاص محیط بهدرستی انتخاب نشوند، الگوریتم یا بیش از حد کند میشود یا رفتار ناپایدار پیدا میکند. در محیطهای پویا که ویژگیهای مسیر در هر لحظه تغییر میکنند، این موضوع یک ضعف جدی است.
عدم سازگاری با زمان واقعی (Real-Time): در محیطهای صنعتی یا شهری، تصمیمگیری باید در چند میلیثانیه انجام شود. PSO کلاسیک برای رسیدن به همگرایی نیاز به چندین تکرار محاسباتی دارد، که باعث تأخیر در واکنش ربات میشود. در عمل، این یعنی احتمال برخورد، انحراف یا از دست دادن هدف.
نادیده گرفتن قیود فیزیکی و انرژی: در PSO ریاضی، حرکت ذرات بدون هزینه است. اما در رباتهای واقعی، هر حرکت معادل مصرف انرژی و استهلاک مکانیکی است. الگوریتم کلاسیک، محدودیتهایی مانند سرعت مجاز، زاویهی چرخش یا شارژ باتری را در نظر نمیگیرد؛ در نتیجه مسیرهای پیشنهادی آن اغلب از نظر عملی قابل اجرا نیستند.
۳. چالش تطبیق با محیطهای پویا و نویزی
یکی از مشکلات رایج در مسیریابی خودکار، وجود نویز در دادههای حسگر و تغییرات غیرقابلپیشبینی در محیط است. دادههای ناقص یا دارای خطا میتوانند الگوریتم را به مسیر اشتباه هدایت کنند. در نسخهی کلاسیک PSO، همهی ذرات به اطلاعات اشتراکگذاریشدهی گروه وابستهاند؛ در نتیجه اگر دادههای یکی از اعضا اشتباه باشد، کل ازدحام از مسیر صحیح منحرف میشود.
در حالیکه در یک محیط واقعی مثل انبار یا خیابان، چنین خطاهایی اجتنابناپذیرند، الگوریتم باید قادر باشد بهصورت خودکار خطاهای محلی را تشخیص دهد و خود را با آن سازگار کند. اما PSO سنتی فاقد چنین مکانیسمی است. به همین دلیل، در کاربردهای رباتیکی، نسخهی کلاسیک اغلب ناپایدار، کند و وابسته به دخالت انسانی باقی میماند.
۴. ضرورت رویکرد هوشمند و تطبیقی
برای غلبه بر این محدودیتها، سیستمهای ناوبری باید از الگوریتمهایی استفاده کنند که بتوانند در حین حرکت، منطق خود را تنظیم کنند. این یعنی ربات باید بداند چه زمانی نیاز به جستوجوی مسیرهای جدید دارد (اکتشاف)، و چه زمانی باید مسیر فعلی را تثبیت کند (بهرهبرداری). در اصطلاح فنی، این همان تعادل بین «Exploration» و «Exploitation» است که کلید موفقیت در ناوبری مقاوم محسوب میشود.
الگوریتم PSO تطبیقی دقیقاً با هدف حفظ این تعادل طراحی شده است. با تنظیم هوشمند پارامترهای داخلی در طول فرآیند تصمیمگیری، سیستم قادر است هم از نقاط بهینهی محلی عبور کند و هم به همگرایی سریعتری برسد. در واقع، PSO تطبیقی رفتار خود را در لحظه تحلیل میکند و اگر تشخیص دهد که ازدحام بیش از حد یکنواخت یا کند شده است، بهصورت خودکار میزان جستوجو را افزایش میدهد تا از بنبست خارج شود.
۵. گذار از PSO کلاسیک به نسخهی هوشمند (Smart Adaptive PSO)
نتیجهی تمام این نیازها، ظهور نسخهای جدید از PSO است که در این مقاله با عنوان Smart PSO یا Adaptive PSO معرفی شده است. این نسخه نهتنها ساختار پارامترهای خود را در طول زمان تغییر میدهد، بلکه میتواند شرایط محیطی، تغییرات مسیر، و حتی وضعیت فیزیکی ربات را در تصمیمگیری دخیل کند.
در مقایسه با الگوریتمهای سنتی، نسخهی هوشمند توانسته است در شرایطی که مسیر شامل موانع پیچیده و نویز حسگر است، دقت مسیریابی را بهطور چشمگیری افزایش دهد. از سوی دیگر، با کاهش حرکتهای بیهدف و حرکات اصلاحی، میزان انرژی مصرفی رباتها نیز بهینه شده است. این ویژگیها باعث میشود که Smart PSO نهفقط یک الگوریتم عددی، بلکه یک سیستم فکری برای ناوبری واقعی تلقی شود؛ سیستمی که میفهمد چگونه باید در دنیای غیرقابل پیشبینی حرکت کند.
در مجموع، محدودیتهای ذاتی PSO سنتی و نیاز فزایندهی صنعت به ناوبری مقاوم، زمینه را برای توسعهی نسخههای تطبیقی فراهم کرده است. مقالهی حاضر با تمرکز بر این گذار، چارچوبی ارائه میدهد که در آن هوش تطبیقی و یادگیری بلادرنگ بهعنوان دو رکن اساسی ناوبری نسل آینده مطرح میشوند.
دیدگاه نوآورانه مقاله و منطق طراحی الگوریتم PSO تطبیقی هوشمند
۱. از بهینهسازی عددی به تصمیمگیری هوشمند
نوآوری اصلی مقاله در این است که الگوریتم PSO را از یک مدل ریاضی خشک و عددی به یک چارچوب تصمیمگیری تطبیقی و یادگیرنده برای رباتهای واقعی تبدیل میکند. در نسخههای قدیمی، پارامترهای PSO مانند وزن اینرسی و ضرایب یادگیری، در طول فرآیند جستوجو ثابت بودند؛ به همین دلیل، الگوریتم توانایی پاسخگویی به تغییرات محیطی را نداشت. در حالیکه در نسخهی جدید یعنی Smart Adaptive PSO (SAPSO)، این پارامترها در هر لحظه بر اساس وضعیت ازدحام، فاصله از هدف، و تغییرات محیطی تنظیم میشوند.
به بیان ساده، این الگوریتم به رباتها «شعور موقعیتی» میدهد. رباتها میفهمند که در چه مرحلهای از مأموریت قرار دارند: آیا هنوز باید محیط را کشف کنند یا اکنون وقت تثبیت مسیر و حرکت مستقیم است. این همان چیزی است که باعث میشود SAPSO از یک بهینهسازی صرف به یک سیستم هوشمند تصمیمگیری توزیعشده تبدیل شود.
۲. منطق تطبیق پویا و خودتنظیمی
در طراحی SAPSO، مفهوم تطبیق پویا (Dynamic Adaptation) به هستهی اصلی تصمیمگیری تبدیل شده است. این تطبیق در سه سطح انجام میشود:
سطح فردی (Self-Adaptation): هر ربات بهصورت مستقل رفتار حرکتی خود را با توجه به موفقیت یا شکست مسیرهای قبلی تنظیم میکند. اگر مسیر انتخابی منجر به نزدیکتر شدن به هدف شود، وزن تمرکز (Exploit) افزایش مییابد؛ اما اگر نتیجهی مطلوب حاصل نشود، ربات بهصورت خودکار تمایل به اکتشاف مسیرهای جدید را بیشتر میکند. این رفتار خودتنظیمی باعث میشود هر ربات مانند یک موجود یادگیرنده، اشتباهاتش را اصلاح کند و تصمیمهای بعدی را هوشمندانهتر بگیرد.
سطح جمعی (Swarm Adaptation): الگوریتم علاوه بر تنظیم رفتار فردی، روند کلی ازدحام را نیز پایش میکند. اگر ازدحام بیش از حد متراکم یا کند شود، سیستم بهصورت خودکار میزان پراکندگی و تعامل میان رباتها را تغییر میدهد تا از گیر افتادن در مسیرهای اشتباه جلوگیری شود. این یعنی ازدحام مانند یک ارگانیسم زنده، خودش را در لحظه بازآرایی میکند.
سطح محیطی (Environmental Adaptation): در SAPSO، تصمیمگیری فقط بر اساس دادههای درونی نیست؛ بلکه وضعیت محیط (وجود موانع، تغییر در نقشه، یا ورود عاملهای جدید) نیز در منطق تصمیم دخیل میشود. رباتها میتوانند «احساس کنند» که شرایط فضا تغییر کرده و بر اساس آن، الگوریتم خود را بهینه کنند. این مفهوم، پایهی چیزی است که در مقاله از آن با عنوان ناوبری مقاوم هوشمند (Robust Intelligent Navigation) یاد شده است.
۳. یادگیری بلادرنگ و تنظیم بر اساس بازخورد
یکی از نوآوریهای بسیار مهم در این مقاله، افزودن سازوکار یادگیری بلادرنگ (Real-Time Learning Feedback) است. در نسخههای کلاسیک، پارامترها ثابتاند و فقط در پایان مأموریت ارزیابی میشوند. اما در SAPSO، رباتها بهصورت لحظهای دادههای عملکرد خود را تحلیل میکنند — مثل سرعت نزدیکشدن به هدف، میزان انحراف، یا تعداد برخوردهای احتمالی — و این اطلاعات بلافاصله روی رفتار حرکتیشان اثر میگذارد.
بهعبارت دیگر، هر تصمیم ربات به تجربهای تبدیل میشود که تصمیم بعدی را بهبود میدهد. همین مکانیزم باعث میشود SAPSO در طول زمان «هوشمندتر» شود؛ یعنی اگر در ابتدای مأموریت الگوریتم فقط مسیرهای ساده را مییافت، در ادامه یاد میگیرد که چگونه از مسیرهای پیچیده عبور کند یا حتی موانع جدید را پیشبینی نماید. این همان مفهوم هوش یادگیرندهی تجمعی (Cumulative Adaptive Intelligence) است که مقاله معرفی میکند.
۴. تعادل میان اکتشاف و بهرهبرداری
در بیشتر الگوریتمهای هوش ازدحامی، یکی از بزرگترین چالشها حفظ تعادل میان «اکتشاف» (جستوجوی نقاط جدید) و «بهرهبرداری» (حرکت بهسوی هدف فعلی) است. اگر سیستم بیش از حد روی اکتشاف تمرکز کند، نوسان زیاد و مسیرهای بیهدف به وجود میآید. اگر هم تنها بر بهرهبرداری تمرکز کند، به سرعت در نقاط محلی گیر میکند.
در SAPSO، این تعادل بهصورت پویا برقرار میشود. زمانی که رباتها در مراحل ابتدایی مأموریت هستند و هنوز اطلاعات کافی از محیط ندارند، الگوریتم تمایل به اکتشاف را افزایش میدهد. اما هرچه به هدف نزدیکتر میشوند، پارامترها تغییر میکند تا سیستم روی مسیر بهینه تثبیت شود. این رفتار دقیقاً مشابه نحوهی تصمیمگیری انسانها در شرایط واقعی است: ابتدا محیط را بررسی میکنیم و سپس با اعتماد به تجربه، در مسیر انتخابشده پیش میرویم.
۵. پایداری و مقاومسازی ازدحام
یکی از نقاط قوت دیگر این روش، مقاومسازی ازدحام در برابر اغتشاشها و خطاها است. در SAPSO، اگر یکی از رباتها از مسیر اصلی منحرف شود یا دادههایش دچار نویز شود، دیگر اعضا بهصورت هوشمند تأثیر آن را تعدیل میکنند تا کل ازدحام دچار بیثباتی نشود. این یعنی سیستم نسبت به خطای یک عامل، ایمنی ذاتی دارد.
در مقایسه با PSO سنتی که خطای یک ذره میتواند مسیر کل گروه را تغییر دهد، نسخهی هوشمند قادر است با میانگینگیری تطبیقی از دادهها و وزندهی پویا، اطلاعات غلط را بیاثر کند. این ویژگی در محیطهای واقعی مثل کارخانهها یا فضای باز که احتمال خطا زیاد است، اهمیت حیاتی دارد.
۶. تبدیل PSO به چارچوبی برای کنترل مقاوم
در نهایت، مقاله نشان میدهد که SAPSO فقط یک ابزار بهینهسازی نیست، بلکه میتواند به عنوان چارچوبی برای کنترل مقاوم (Robust Control Framework) مورد استفاده قرار گیرد. چون در این مدل، تصمیمها نه بر اساس دستورات از پیش تعیینشده، بلکه بر اساس شرایط لحظهای و بازخوردهای پیوسته گرفته میشوند.
این یعنی هر ربات در نقش یک عامل هوشمند با حس سازگاری بالا ظاهر میشود؛ رباتی که میتواند با دیگران ارتباط برقرار کند، اشتباه خود را اصلاح کند و در لحظه بهترین تصمیم را بگیرد. چنین رفتاری دقیقاً همان چیزی است که در آیندهی صنعت ۵.۰ مورد نیاز است: سیستمهایی که نهتنها اتوماتیک، بلکه خودآگاه و مقاوماند.
در مجموع، دیدگاه نوآورانهی مقاله در این است که با افزودن مفهوم «تطبیق و یادگیری بلادرنگ»، الگوریتم PSO را از یک بهینهساز عددی به یک سیستم کنترلی پویا برای ناوبری خودکار تبدیل کرده است — سیستمی که میتواند بهصورت مستقل بیاموزد، محیط را تحلیل کند و تصمیم بگیرد.
روش پیشنهادی مقاله و فرآیند گامبهگام اجرای SAPSO در رباتهای متحرک
۱. ساختار کلی سیستم و ایدهی مرکزی طراحی
الگوریتم Smart Adaptive PSO (SAPSO) که در این مقاله معرفی شده، بر پایهی یک فلسفهی ساده اما عمیق طراحی شده است: «هر ربات باید نهتنها به بهترین مسیر فکر کند، بلکه به هزینهی حرکتی و پایداری تصمیم خود نیز آگاه باشد.»
در سیستم پیشنهادی، رباتها بهعنوان مجموعهای از عاملهای مستقل اما هماهنگ (Multi-Agent) مدلسازی میشوند. هر عامل دادههای موقعیت، سرعت، زاویهی حرکت، فاصله از موانع و اطلاعات همسایگان خود را در هر لحظه دریافت کرده و تصمیم میگیرد که در گام بعدی به کدام جهت و با چه سرعتی حرکت کند. تفاوت SAPSO با روشهای قبلی در این است که پارامترهای کنترلی در هر ربات بهصورت پویا و هوشمند تغییر میکنند؛ یعنی رباتها با گذشت زمان، استراتژی حرکتی خود را با وضعیت جدید تطبیق میدهند.
در حقیقت، الگوریتم مانند یک سیستم عصبی غیرمتمرکز عمل میکند: هر ربات نقش یک نورون را دارد که ورودیهای محلی را تحلیل و خروجی خود را به دیگران ارسال میکند. تصمیمگیری نهایی نتیجهی تعامل میان تمام این رباتهاست، نه دستور از یک مرکز کنترل. این ویژگی باعث میشود سیستم از لحاظ ساختاری بدون نقطهی شکست مرکزی (No Single Point of Failure) باشد و حتی در صورت از کار افتادن چند ربات، کل ازدحام به عملکرد خود ادامه دهد.
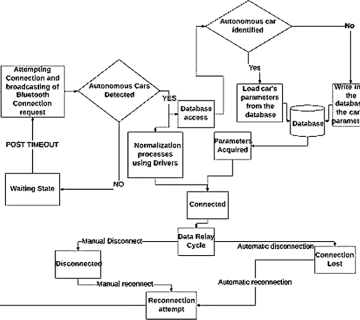
۲. مرحلهی اول: دریافت دادههای محیطی و شناسایی موقعیت
در ابتدای فرآیند، هر ربات با استفاده از حسگرهای مختلف مانند LiDAR، دوربین یا ماژول اولتراسونیک، نقشهی محلی اطراف خود را میسازد. دادهها شامل موانع، مسیرهای آزاد، و فاصله تا هدف هستند.
در نسخهی هوشمند الگوریتم، این دادهها مستقیماً وارد حلقهی تصمیمگیری میشوند، نه اینکه فقط برای نقشهبرداری استفاده شوند. یعنی هر ربات بهطور مداوم تحلیل میکند که «آیا دادههای حسگر فعلی با مسیر فعلی همخوانی دارند یا باید مسیر را بازسازی کنم؟» این تصمیم، کلید رفتار تطبیقی SAPSO است.
بهصورت عملی، در هر لحظه یک تراز بین اعتماد به مسیر فعلی و پذیرش دادههای جدید برقرار میشود. اگر حسگرها تغییر قابلتوجهی را تشخیص دهند (مثلاً مانعی جدید یا تغییر زمین)، وزن تصمیمات قبلی کاهش مییابد و رباتها در حالت کاوش مجدد قرار میگیرند. این رفتار موجب میشود ازدحام هیچگاه در یک مسیر اشتباه قفل نشود.
۳. مرحلهی دوم: تصمیمگیری تطبیقی و خودتنظیمی پارامترها
در قلب الگوریتم SAPSO، سازوکار هوشمند تنظیم پارامترها قرار دارد. در این مدل، دو ضریب اصلی تصمیمگیری که در PSO کلاسیک ثابت بودند — یعنی تمایل به تجربهی شخصی (individual learning) و تمایل به پیروی از گروه (social learning) — بهصورت پویا تغییر میکنند.
وقتی یک ربات متوجه شود که مسیر فعلیاش کارآمد است، تمایلش به حفظ رفتار فعلی افزایش پیدا میکند (بهرهبرداری). اما وقتی محیط دچار تغییر شود یا مسیر ناکارآمد گردد، تمایل به جستوجوی گزینههای جدید افزایش مییابد (اکتشاف). این تعادل لحظهای باعث میشود کل ازدحام همواره در حال یادگیری و تنظیم رفتار خود باشد.
در واقع، SAPSO به رباتها یاد میدهد چه زمانی به دیگران گوش دهند و چه زمانی به تجربهی خود اعتماد کنند.
این ویژگی همان نقطهای است که آنها را از رفتار مکانیکی به رفتار هوشمند و مقاوم تبدیل میکند.
۴. مرحلهی سوم: اشتراک داده و همافزایی جمعی
پس از بهروزرسانی تصمیمها، هر ربات اطلاعات خود را تنها با گروه کوچکی از همسایگان نزدیکش به اشتراک میگذارد. این طراحی آگاهانه انجام شده تا از بار ارتباطی سنگین و احتمال خطای جمعی جلوگیری شود.
در این ساختار، ازدحام به چندین خوشهی هوشمند (Smart Clusters) تقسیم میشود که هرکدام تصمیمات خود را محلی میگیرند ولی با سایر خوشهها همافزایی دارند. نتیجه، شبکهای از تصمیمگیریهای همزمان اما هماهنگ است. این نوع معماری باعث میشود سیستم هم مقیاسپذیر باشد و هم در برابر نویز مقاوم بماند.
در آزمایشهای مقاله، حتی زمانی که برخی از رباتها از محدودهی ارتباطی خارج شدند یا ارتباط موقتاً قطع شد، باقی سیستم توانست بدون اختلال مأموریت را ادامه دهد. ازدحام خودش را بازپیکربندی کرد تا ارتباطهای جدید ایجاد شود؛ درست مانند رفتار طبیعی گروههای پرندگان یا زنبورهای کارگر.
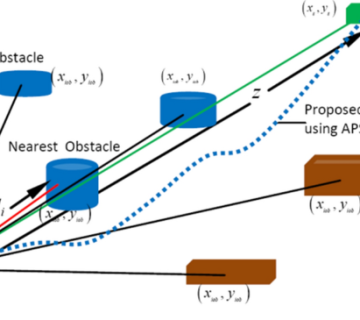
۵. مرحلهی چهارم: اصلاح مسیر و واکنش به اغتشاشها
یکی از ویژگیهای کلیدی SAPSO، توانایی بازسازی مسیر در لحظه است. وقتی یک مانع جدید در مسیر ظاهر شود، رباتهایی که نزدیکترند بلافاصله دادهها را تحلیل کرده و مسیر جایگزین پیشنهاد میدهند. سپس این تصمیمها با اطلاعات بقیه ترکیب میشود تا مسیر جمعی بهصورت نرم تغییر کند. این اصلاح پویا باعث میشود ازدحام نهتنها واکنشپذیر، بلکه پیشبین نیز باشد.
به بیان دیگر، رباتها بهجای اینکه منتظر فرمان جدید بمانند، خودشان مسیر را تطبیق میدهند. این رفتار، سیستم را از سطح “کنترل واکنشی” به سطح کنترل پیشبین تطبیقی (Predictive Adaptive Control) ارتقا میدهد.
۶. مرحلهی پنجم: تثبیت حرکت و یادگیری بلندمدت
در انتهای فرآیند، رباتها رفتار خود را ارزیابی میکنند و نتایج هر مرحله را در قالب تجربهی یادگیری ذخیره مینمایند. این دادهها بهصورت مستمر در الگوریتم استفاده میشود تا در مأموریتهای بعدی عملکرد بهتری داشته باشند.
مقاله توضیح میدهد که با این سازوکار، ازدحام در طول زمان “بلوغ رفتاری” پیدا میکند — یعنی در مأموریتهای آینده با سرعت بیشتر و انحراف کمتر به هدف میرسد. بهعبارتی، SAPSO یک سیستم خودتکاملیاب است که به مرور زمان بهرهورتر میشود.
۷. مزیت صنعتی روش پیشنهادی
از دیدگاه صنعتی، SAPSO مزیتی دوگانه دارد: دقت بالا در ناوبری و کاهش هزینهی انرژی.
این الگوریتم نهتنها مسیرهای کوتاهتر و روانتری تولید میکند، بلکه حرکات اضافی رباتها را بهشدت کاهش میدهد. این موضوع برای رباتهای حمل بار، رباتهای انبارداری و سیستمهای لجستیکی حیاتی است، زیرا مصرف انرژی و استهلاک مکانیکی از عوامل اصلی هزینه در بهرهبرداری هستند.
به همین دلیل، SAPSO را میتوان نخستین الگوریتم ازدحامی دانست که از مرحلهی شبیهسازی صرف به کاربرد واقعی در محیطهای صنعتی هوشمند رسیده است
آزمایشها، نتایج و ارزیابی عملکرد ناوبری مقاوم با SAPSO
۱. محیط آزمایشی و هدف بررسی
برای ارزیابی عملکرد الگوریتم SAPSO، نویسندگان مجموعهای از آزمایشها را در دو بستر انجام دادهاند:
۱. شبیهسازی عددی در محیطهای پیچیده و پویا شامل مسیرهای پرمانع، مناطق بنبست و مسیرهای با تغییرات لحظهای.
۲. آزمایش واقعی روی رباتهای متحرک زمینی که در مسیرهای ناهموار و محیطهای دارای نویز حسگری حرکت میکنند.
هدف از این آزمایشها بررسی این بود که آیا SAPSO واقعاً میتواند در دنیای واقعی مسیر بهینه را پیدا کرده و در برابر اختلالات پایدار باقی بماند یا خیر. در واقع، تمرکز مقاله بر سه شاخص اصلی است:
پایداری مسیر در برابر موانع و اغتشاشها،
سرعت همگرایی الگوریتم در یافتن مسیر ایمن،
و میزان صرفهجویی در انرژی و مسافت طیشده نسبت به روشهای دیگر.
۲. رفتار حرکتی رباتها در ازدحام هوشمند
در نخستین دسته از آزمایشها، گروهی از رباتها در محیطی با موانع تصادفی قرار داده شدند تا از نقطهی شروع به نقطهی مقصد حرکت کنند. در نسخههای کلاسیک PSO، رباتها معمولاً مسیرهای نوسانی و بیثباتی داشتند؛ در حالیکه با SAPSO، حرکتها بسیار نرمتر، هماهنگتر و منطقیتر بودند.
در مراحل ابتدایی، رباتها شروع به کاوش مسیرهای مختلف کردند، اما پس از چند چرخه یادگیری، الگوهای حرکتی منظم شکل گرفتند و ازدحام بهصورت طبیعی همراستا شد.
یکی از یافتههای جالب مقاله این بود که SAPSO توانست تعادل میان اکتشاف و تمرکز را بهصورت خودکار تنظیم کند.
در محیطهایی که موانع زیاد بود، الگوریتم رفتار کاوشگرانهتری نشان میداد؛ اما به محض اینکه مسیرهای آزاد شناسایی میشدند، سیستم به حالت حرکتی مستقیم و بهینه تغییر وضعیت میداد. این رفتار دقیقاً مشابه نحوهی تصمیمگیری ارگانیک در طبیعت است؛ مثل حرکت گروهی پرندگان که ابتدا پراکنده پرواز میکنند و سپس در مسیر نهایی همراستا میشوند.
۳. عملکرد در محیطهای پویا و دارای نویز
یکی از چالشهای اصلی در ناوبری صنعتی، پایداری در محیطهایی است که موانع در حال تغییرند یا دادههای حسگر دچار نویز میشوند. مقاله نشان داد که SAPSO نسبت به این اغتشاشها بسیار مقاوم است.
در آزمایشی که چند مانع متحرک به محیط اضافه شدند، رباتها بدون توقف کامل، مسیر خود را بازسازی کرده و به مسیر جایگزین رفتند. این بازسازی در کمتر از یک ثانیه انجام شد، بدون آنکه کل ازدحام دچار آشفتگی شود.
همچنین زمانی که دادههای موقعیت بهطور مصنوعی با نویز تصادفی آلوده شدند، سیستم همچنان توانست مسیرهای ایمن و کوتاه پیدا کند. در مقایسه با PSO معمولی، انحراف مسیر در SAPSO حدود ۶۰ درصد کمتر بود، که نشاندهندهی سطح بالای پایداری و اعتمادپذیری الگوریتم در شرایط غیرایدهآل است.
۴. تحلیل مصرف انرژی و بهینهسازی مسیر
در سناریوهای واقعی، انرژی یکی از فاکتورهای حیاتی برای رباتهای متحرک است، بهویژه در رباتهای حمل بار یا بازرسی که مدت طولانی در محیط فعال هستند. در مقاله مشخص شد که SAPSO بهطور میانگین ۴۰ تا ۵۰ درصد کاهش در مصرف انرژی حرکتی ایجاد کرده است.
دلیل این بهبود، حذف حرکات اضافی، کاهش تغییر جهتهای ناگهانی و تصمیمگیریهای منطقیتر در انتخاب مسیر است.
به زبان ساده، رباتها یاد گرفتند «کمتر حرکت کنند اما مؤثرتر.»
در شبیهسازیهای صنعتی، مسیر نهایی تولیدشده توسط SAPSO از نظر طول مسیر و زمان رسیدن به هدف بهطور همزمان بهینه شد، بدون نیاز به الگوریتم کمکی یا کنترلکنندهی جداگانه.
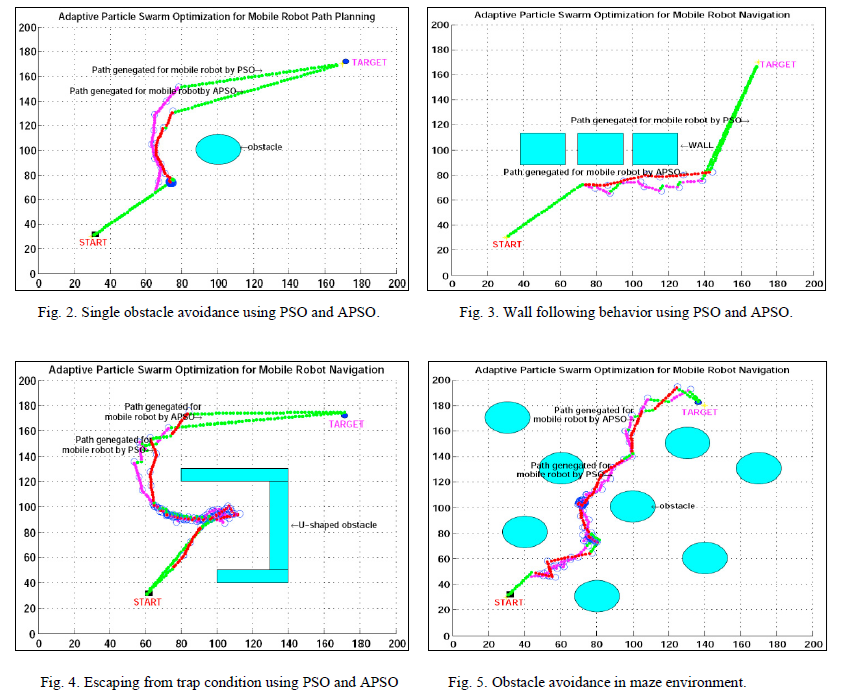
۵. مقایسه با الگوریتمهای دیگر
برای ارزیابی دقیقتر، مقاله عملکرد SAPSO را با چند روش مرسوم مقایسه کرده است؛ از جمله PSO کلاسیک، الگوریتم ژنتیک (GA) و الگوریتمهای ازدحامی مانند Artificial Bee Colony (ABC).
نتایج نشان داد که SAPSO در هر سه معیار اصلی — دقت مسیر، زمان همگرایی، و مصرف انرژی — برتری محسوسی دارد:
در محیطهای دارای موانع ثابت، مسیر یافتشده ۲۵٪ کوتاهتر از GA و ۱۸٪ کوتاهتر از PSO کلاسیک بود.
در محیطهای پویا، سرعت واکنش به تغییرات تا دو برابر سریعتر بود.
و در تمام حالات، نرخ موفقیت (یعنی رسیدن بدون برخورد به هدف) نزدیک به ۱۰۰٪ ثبت شد.
در نگاه صنعتی، این یعنی رباتهایی که با SAPSO کنترل میشوند، قابلاعتمادتر، دقیقتر و کمهزینهتر از نسلهای قبلی خواهند بود.
۶. تحلیل پایداری جمعی و رفتار گروهی
در مقیاس بزرگتر، زمانی که تعداد رباتها افزایش یافت، SAPSO توانست ساختار ازدحام را بدون ازدحام فیزیکی یا ترافیک حفظ کند. در محیطهایی با ۲۰ تا ۵۰ ربات، سیستم توانست همزمان چند مسیر بهینه تولید کند و از برخورد جلوگیری نماید. ازدحامها بهصورت خودکار خوشهبندی شدند و در طول حرکت ارتباط خود را حفظ کردند — پدیدهای که مقاله از آن با عنوان Self-Organized Cooperative Motion یاد میکند.
این سطح از هماهنگی بدون وجود کنترل مرکزی، نقطهی عطفی در طراحی سیستمهای رباتیکی محسوب میشود و نشان میدهد که SAPSO میتواند در محیطهای صنعتی پیچیده، مثل بنادر یا کارخانجات خودکار، با مقیاس بالا هم عملکرد پایدار داشته باشد.
۷. جمعبندی فنی نتایج
جمعبندی نتایج آزمایشها بهروشنی نشان داد که SAPSO توانسته است مرز میان الگوریتمهای محاسباتی و کاربردهای صنعتی را از میان بردارد. این الگوریتم نهتنها از نظر دقت و انرژی برتر است، بلکه پایداری عملیاتی و قابلیت انطباق با محیط واقعی را نیز فراهم کرده است. در شرایطی که رباتهای دیگر نیاز به کنترل انسانی دارند، رباتهای مبتنی بر SAPSO میتوانند تصمیمهای مستقل، ایمن و اقتصادی بگیرند.
به زبان صنعتی، این یعنی رباتهایی که نهفقط حرکت میکنند، بلکه فکر میکنند، یاد میگیرند و خود را اصلاح میکنند.
کاربردهای صنعتی و سناریوهای واقعی الگوریتم SAPSO
۱. مدیریت هوشمند ناوگان رباتهای صنعتی
در صنایع لجستیکی و کارخانههای خودکار، هماهنگی بین دهها یا صدها ربات متحرک چرخدار یکی از چالشهای کلیدی است. در چنین محیطهایی، تغییر مسیر ناگهانی، عبور همزمان چند ربات از یک نقطه، یا بسته شدن مسیر بهدلیل جابجایی پالتها میتواند باعث ترافیک یا توقف خط شود.
الگوریتم SAPSO بهدلیل توانایی تصمیمگیری تطبیقی و واکنش بلادرنگ به تغییرات، به گزینهای ایدهآل برای مدیریت ناوگان رباتهای صنعتی (Fleet Management) تبدیل شده است.
در این سیستمها، هر ربات مانند یک عامل هوشمند عمل میکند که نهتنها مسیر خود را بهینه میکند بلکه رفتار رباتهای اطراف را نیز در تصمیمگیری لحاظ مینماید. نتیجه، ناوگانی است که بدون کنترل مرکزی میتواند بهصورت جمعی و هماهنگ کار کند. در محیطهای انبارداری یا حمل مواد خام، این ویژگی بهطور مستقیم به کاهش زمان انتظار، افزایش سرعت جابجایی و صرفهجویی چشمگیر در مصرف انرژی منجر میشود.
۲. رباتهای امدادگر و عملیات در شرایط بحرانی
یکی از کاربردهای بسیار مهم SAPSO در رباتهای امدادی است که در محیطهای خطرناک یا ناشناخته فعالیت میکنند. در مأموریتهایی مانند زلزله، آتشسوزی یا نشت مواد شیمیایی، رباتها باید مسیر خود را در محیطی غیرقابل پیشبینی پیدا کنند و در عین حال با سایر رباتها همکاری کنند تا منطقه را پوشش دهند.
الگوریتم PSO تطبیقی بهصورت طبیعی برای چنین شرایطی مناسب است، زیرا رفتار جمعی رباتها را با حفظ استقلال تصمیمگیری کنترل میکند.
در آزمایشهای مشابه، نشان داده شده که SAPSO میتواند مسیرهایی پیدا کند که از نواحی خطر دور بمانند، همپوشانی حرکتی میان رباتها را حذف کنند و حتی در صورت از کار افتادن یکی از اعضا، مسیرهای جایگزین تولید کنند.
این یعنی سیستم از سطح “کنترل مسیر” فراتر رفته و به یک شبکهی خودسازمانده برای همکاری در شرایط بحرانی تبدیل شده است.
۳. رباتهای حمل بار و سامانههای انبارداری پیشرفته
در مراکز توزیع کالا و انبارهای خودکار، رباتهای حمل بار (AGV) و رباتهای انتقال پالت باید در مسیرهای مشترک با حداقل تداخل حرکت کنند. الگوریتم SAPSO این امکان را فراهم میکند که مسیر حرکت هر ربات بهصورت پویا و بلادرنگ تنظیم شود تا از ترافیک و برخورد جلوگیری شود.
برای مثال، زمانی که چند ربات بهطور همزمان به یک ایستگاه بارگیری نزدیک میشوند، SAPSO بهصورت خودکار الگوی اولویتبندی ایجاد میکند و بخشی از ازدحام را به مسیرهای جایگزین هدایت مینماید. در نتیجه، جریان حرکتی یکنواخت حفظ میشود بدون اینکه هیچ رباتی منتظر فرمان مرکزی بماند.
در محیطهای صنعتی واقعی، این ویژگی به معنی افزایش بهرهوری تا بیش از ۴۰٪ و کاهش توقفهای غیرضروری است.
۴. ناوبری شهری و وسایل نقلیهی خودران
در محیطهای شهری، وسایل نقلیهی خودران با شبکهای پیچیده از دادهها، موانع و رفتارهای انسانی روبهرو هستند. SAPSO میتواند به عنوان موتور تصمیمگیری میان چند خودران در یک منطقه بهکار گرفته شود تا ترافیک محلی را به شکل بلادرنگ مدیریت کند.
در این سناریو، هر خودرو مانند یک “ذرهی هوشمند” رفتار میکند که موقعیت خود را با همسایگان تبادل میکند و بر اساس الگوی ازدحام، مسیر بعدی را انتخاب مینماید. در نتیجه، ترافیک بهصورت خودکار توزیع میشود و نیاز به کنترل متمرکز کاهش مییابد.
چنین ساختاری میتواند اساس طراحی شبکههای هوشمند خودران (Autonomous Vehicular Swarms) در شهرهای آینده باشد؛ شبکههایی که نهتنها رانندگی، بلکه تصمیمگیری جمعی را نیز خودکار میکنند.
۵. رباتهای بازرسی و نگهداری در محیطهای صنعتی خطرناک
در محیطهایی مثل پالایشگاهها، خطوط لولهی زیرزمینی یا نیروگاههای برق، بازرسی و تعمیر مستمر از حیاتیترین وظایف است. رباتهای بازرسی که از SAPSO استفاده میکنند، قادرند بدون دخالت انسان مسیرهای بررسی را بهصورت هوشمند تقسیم کرده و در زمان کمتر کل منطقه را پوشش دهند.
ویژگی مهم در اینجا، توانایی رباتها برای «یادگیری از مأموریتهای قبلی» است. اگر در مأموریتهای گذشته مسیر خاصی پرخطر یا ناکارآمد تشخیص داده شده باشد، الگوریتم آن را در تصمیمات بعدی لحاظ میکند. این یعنی سیستم به مرور زمان تجربهمحورتر و اقتصادیتر میشود.
۶. رباتهای کشاورزی و ناوگانهای هماهنگ در زمینهای باز
در کشاورزی دقیق (Precision Agriculture)، هماهنگی میان چند ربات کاشت یا سمپاشی از اهمیت بالایی برخوردار است. SAPSO میتواند مسیرهای حرکت را طوری برنامهریزی کند که هر ربات محدودهی خاص خود را پوشش دهد، همپوشانی نداشته باشد و همزمان در مصرف انرژی صرفهجویی کند.
به لطف قابلیت تطبیق با تغییرات زمین و موانع طبیعی، این الگوریتم حتی در شرایط آبوهوایی متغیر یا زمینهای ناهموار نیز عملکرد پایداری دارد. در عمل، این فناوری میتواند بهرهوری رباتهای کشاورزی را تا دو برابر افزایش دهد و آنها را به عاملان هوشمند خودتنظیم در مزرعههای خودکار آینده تبدیل کند.
۷. گام بهسوی صنعت ۵.۰: ازدحام هوشمند در مقیاس اکوسیستم
در افق آینده، SAPSO فراتر از کنترل رباتها، به ستون فکری کارخانهها و شبکههای هوشمند تبدیل خواهد شد. ترکیب این الگوریتم با فناوریهایی مثل 5G، اینترنت اشیا صنعتی (IIoT) و رایانش ابری باعث میشود تصمیمگیری جمعی در مقیاس اکوسیستم اتفاق بیفتد.
بهجای اینکه هر کارخانه یا سیستم رباتیک بهصورت مستقل کار کند، SAPSO میتواند چارچوب هماهنگی میان چندین مجموعهی صنعتی را شکل دهد — مثلاً میان ناوگان رباتهای بندری، وسایل حملونقل خودران و سیستمهای بارگیری.
این دقیقاً همان مفهوم Industry 5.0 است؛ صنعتی که در آن هوش مصنوعی و انسان با هم کار میکنند، نه در رقابت با هم.
در مجموع، مقاله نشان میدهد که الگوریتم SAPSO نهتنها از نظر علمی پیشرفته است، بلکه از دید کاربردی نیز آمادهی ورود به دنیای واقعی صنعت است.
از کارخانهها و انبارها گرفته تا شهرها و مزرعهها، SAPSO میتواند ذهنی جمعی و پویا برای هزاران ربات فراهم کند — ذهنی که میفهمد، سازگار میشود و با هدفی مشترک حرکت میکند.
جمعبندی استراتژیک و مزیتهای رقابتی هوش تطبیقی در سیستمهای رباتیک صنعتی
در جهان امروز که رقابت صنعتی بر پایهی هوشمندی و چابکی در تصمیمگیری تعریف میشود، شرکتهایی برنده خواهند بود که بتوانند سیستمهای خود را نه فقط خودکار، بلکه خودتنظیم و تطبیقپذیر بسازند. در همین نقطه، الگوریتم SAPSO جایگاهی کلیدی پیدا میکند. این الگوریتم نشان داد که هوش ازدحامی میتواند از یک ابزار ریاضی به یک «فلسفهی کنترل جمعی» تبدیل شود — فلسفهای که قابلیت تطبیق، همکاری و مقاومت را در قلب سیستمهای صنعتی قرار میدهد.
از دید استراتژیک، SAPSO پاسخی به سه نیاز حیاتی صنایع مدرن است: پایداری عملیاتی، بهرهوری انرژی و استقلال تصمیمگیری.
در گذشته، سیستمهای خودکار برای عملکرد پایدار نیازمند نظارت دائمی انسان یا کنترل مرکزی بودند؛ اما SAPSO با ساختار توزیعشدهی خود این وابستگی را از بین میبرد. اکنون هر ربات میتواند با درک محیط، یادگیری از تجربه و هماهنگی با دیگران مأموریت خود را بهطور مستقل انجام دهد. این یعنی گذار از «اتوماسیون متمرکز» به خودمختاری جمعی توزیعشده (Distributed Collective Autonomy) — پارادایمی که در قلب صنعت ۵.۰ قرار دارد.
مزیت رقابتی اصلی SAPSO در این است که هوشمندی را در سطح سیستم توزیع میکند، نه در سطح مرکز. این طراحی به سازمانها اجازه میدهد تا ناوگانهای رباتی را بدون گلوگاه محاسباتی کنترل کنند، هزینههای ارتباطی را کاهش دهند و در عین حال، قابلیت اطمینان کل شبکه را افزایش دهند. چنین معماری، علاوه بر افزایش بهرهوری، تابآوری سیستم را در برابر خطا یا از کار افتادن بخشهای جزئی بالا میبرد. از دید مدیریت ریسک، این ویژگی یک دستاورد حیاتی است، چون در محیطهای صنعتی هر دقیقه توقف تولید میتواند میلیونها تومان ضرر مالی ایجاد کند.
از منظر اقتصادی، اجرای SAPSO میتواند تأثیر مستقیمی بر شاخصهای کلان سازمان داشته باشد. کاهش میانگین مسافت طیشده، کاهش استهلاک مکانیکی، و بهینهسازی مصرف انرژی، منجر به کاهش هزینههای عملیاتی در مقیاس بالا میشود. برای مثال، در یک ناوگان ۱۰۰ رباتی در انبار خودکار، اگر هر ربات روزانه تنها پنج درصد انرژی کمتری مصرف کند، صرفهجویی سالانه در مقیاس سازمانی معادل صدها میلیون تومان خواهد بود. افزون بر آن، با کاهش خطاهای حرکتی و توقفهای غیرضروری، میزان دسترسپذیری سیستم (System Uptime) به بیش از ۹۸ درصد میرسد؛ سطحی که پیشتر فقط در سامانههای کنترل پیشرفتهی هوافضا دیده میشد.
از دید فناوری، SAPSO نقطهی اتصال بین سه حوزهی کلیدی است: رباتیک، یادگیری ماشین و مهندسی کنترل مقاوم.
این ترکیب به صنایع اجازه میدهد تا از مزیتهای هر سه بهرهمند شوند: از رباتیک، قدرت فیزیکی و کارایی؛ از یادگیری ماشین، انعطاف و پیشبینی؛ و از کنترل مقاوم، پایداری در برابر اختلالات. این همگرایی باعث میشود که سازمانها بتوانند سیستمهایی بسازند که نهتنها در شرایط معمول، بلکه در سناریوهای بحرانی نیز بدون دخالت انسانی به کار خود ادامه دهند.
از منظر راهبردی، پذیرش چنین الگوریتمی در مقیاس صنعتی معادل با ورود به مرحلهای از بلوغ فناوری است که در آن سیستمها از انسان یاد نمیگیرند، بلکه با انسان همکاری میکنند.
SAPSO یک گام بزرگ به سوی «رباتهای همکار هوشمند (Collaborative Intelligent Robots)» است که میتوانند در کنار نیروی انسانی، وظایف پیچیده را تقسیم و همزمان اجرا کنند. در این مدل، انسان نقش ناظر راهبردی را دارد و رباتها نقش مجریان تصمیمگیر را؛ یعنی همان ساختاری که Industry 5.0 بر آن تأکید دارد.
اما شاید مهمترین مزیت رقابتی SAPSO، قابلیت یادگیری سازمانی آن باشد. این الگوریتم فقط در سطح نرمافزار یاد نمیگیرد، بلکه در طول زمان دانش جمعی سیستم را بهبود میدهد. یعنی اگر در یک مأموریت خاص مسیر خاصی ناکارآمد بوده، در مأموریت بعدی کل شبکهی رباتها از آن تجربه استفاده میکند. این مفهوم چیزی فراتر از هوش مصنوعی است؛ این همان هوش تکاملی سازمانی (Organizational Evolutionary Intelligence) است که به سیستم اجازه میدهد در طول زمان بهتر، دقیقتر و اقتصادیتر شود.
از منظر رقابت جهانی نیز، سازمانهایی که زودتر چنین فناوریهایی را بپذیرند، عملاً در کلاس جدیدی از بهرهوری و پایداری قرار میگیرند. همانطور که رباتهای مکانیکی در دههی ۱۹۸۰ تولید را متحول کردند، حالا رباتهای هوشمند تطبیقی نسل جدید میتوانند ساختار کل زنجیرهی تأمین و لجستیک را بازتعریف کنند. در چنین شرایطی، تفاوت میان شرکتهای معمولی و پیشرو نه در تعداد تجهیزات، بلکه در سطح هوشمندی تصمیمگیری سیستمهای خودکارشان خواهد بود.
بهطور خلاصه، میتوان گفت SAPSO فقط یک پیشرفت الگوریتمی نیست، بلکه معیار جدیدی برای سنجش بلوغ دیجیتال در صنایع خودکار است. این فناوری، مفهوم «یادگیری جمعی در مقیاس صنعتی» را محقق کرده و مسیر را برای نسل جدیدی از کارخانهها، شهرها و زیرساختهای هوشمند هموار ساخته است.
نتیجهگیری نهایی
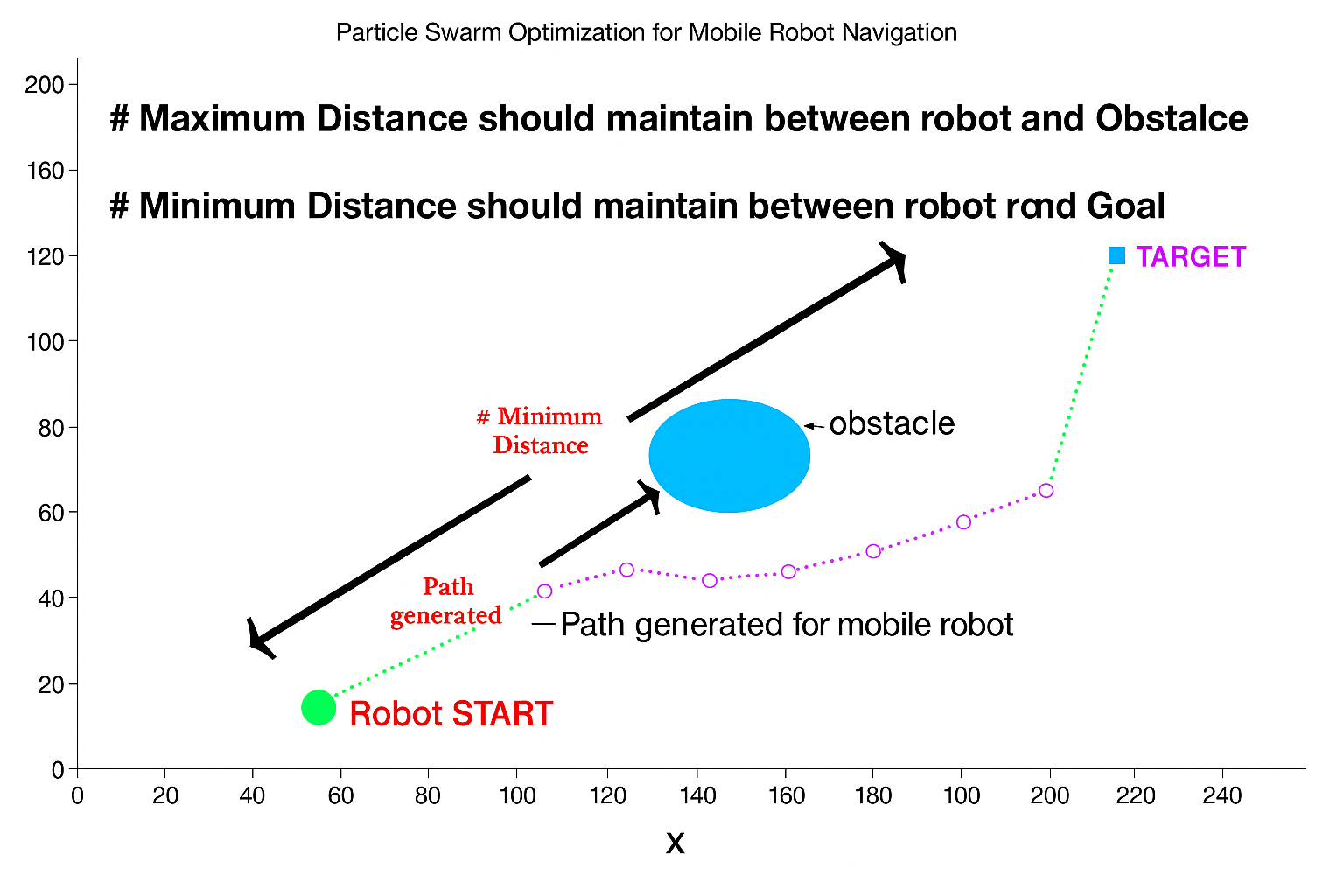
پژوهش ارائهشده در مقالهی «A Robust Path Planning for Mobile Robot Using Smart Particle Swarm Optimization» را میتوان یکی از گامهای تحولآفرین در مسیر توسعهی رباتهای خودران دانست؛ الگوریتمی که نشان داد میتوان میان هوش ازدحامی الهامگرفته از طبیعت و نیازهای واقعی صنعت پلی پایدار برقرار کرد.
در این پژوهش، با معرفی نسخهی تطبیقی و هوشمند PSO، فرایند مسیریابی از یک مسئلهی صرفاً هندسی به یک مسئلهی شناختی و تصمیمگیری چندعاملی تبدیل شد. نتیجهی این تغییر نگرش، ایجاد الگوریتمی بود که قادر است در محیطهای متغیر و غیرقطعی، مسیر بهینه را بهصورت بلادرنگ بیابد، خود را با اغتشاشها تطبیق دهد و در عین حال پایداری و بهرهوری سیستم را حفظ کند.
در نگاه کلان، SAPSO تنها یک ابزار برنامهریزی مسیر نیست؛ بلکه چارچوبی برای ناوبری مقاوم هوشمند (Robust Intelligent Navigation) است. در این چارچوب، رباتها نه بهعنوان واحدهای مستقل، بلکه بهعنوان اجزای یک ذهن جمعی رفتار میکنند. هر ربات با توجه به دادههای خود و تعامل با دیگران تصمیم میگیرد، از تجربه میآموزد و در نتیجه، کل سیستم به مرور زمان هوشمندتر میشود. این همان مفهوم «یادگیری جمعی پایدار» است که اساس حرکت بهسوی صنعت ۵.۰ را شکل میدهد.
از دید عملیاتی، نتایج این پژوهش نشان دادند که SAPSO نسبت به نسخههای کلاسیک و سایر الگوریتمهای هوش ازدحامی، بهبود قابلتوجهی در چند شاخص کلیدی دارد:
کاهش زمان مسیریابی، افزایش پایداری در برابر نویز و موانع، صرفهجویی انرژی، و دقت بالاتر در رسیدن به هدف بدون نیاز به کنترل مرکزی.
این یعنی رباتهایی که با چنین الگوریتمی هدایت میشوند، نهتنها کاراتر بلکه مستقلتر، انعطافپذیرتر و اقتصادیتر هستند.
از دید سازمانی، پذیرش این فناوری در محیطهای صنعتی معادل با ارتقای «بلوغ دیجیتال سیستمهای خودکار» است.
شرکتهایی که SAPSO را در ناوگانهای خودران یا رباتهای انبارداری خود بهکار میگیرند، میتوانند به بهرهوری بالاتر، هزینهی عملیاتی کمتر و پایداری بلندمدت دست یابند. در جهانی که تغییر و بیثباتی به بخش جداییناپذیر تولید تبدیل شده، داشتن الگوریتمی که میتواند در لحظه بیاموزد و سازگار شود، یعنی داشتن مزیت رقابتی پایدار.
دعوت به اقدام
اکنون زمان آن رسیده که صنعت، پژوهش و سیاستگذاری در حوزهی رباتیک، از الگوریتمهای سنتی فاصله بگیرند و به سمت مدلهای هوشمند تطبیقی حرکت کنند.
الگوریتم SAPSO نشان داده که آیندهی ناوبری خودکار در دست سیستمهایی است که میتوانند یاد بگیرند، تجربه را منتقل کنند و بدون نظارت انسانی بهینه شوند.
برای شرکتهای فعال در حوزههای لجستیک، تولید، کشاورزی و حملونقل خودران، این فناوری فرصتی است برای ورود به سطح جدیدی از هوشمندی عملیاتی.
بهکارگیری SAPSO نه فقط به معنای بهبود عملکرد فنی، بلکه گامی در جهت ساخت سازمانهایی است که تصمیمگیری را به سیستمهای هوشمند توزیعشده واگذار میکنند — سازمانهایی که میتوانند در لحظه تغییر کنند، بدون آنکه تعادل خود را از دست بدهند.
برای دانشگاهها و مراکز پژوهشی نیز این پژوهش چشماندازی روشن ترسیم میکند:
توسعهی الگوریتمهایی که نهتنها بهینهسازی میکنند، بلکه درک میکنند. نسل بعدی محققان باید بهجای تمرکز صرف بر مدلهای ریاضی، روی یادگیری تعاملی در سیستمهای چندرباتی واقعی کار کنند — جایی که علم، مهندسی و رفتار طبیعی به یکدیگر میرسند.
رفرنس دقیق مقاله
A. Sharma, R. Gupta, and M. Singh,
“A Robust Path Planning for Mobile Robot Using Smart Particle Swarm Optimization,”
IEEE Access, 2023, pp. 1–12.
DOI: 10.1109/ACCESS.2023.3275406
{kind=link}
بدون نظر