

بازآفرینی جریان کاری آزمایشگاهی با رباتهای موبایل: از نیاز حیاتی تا پاسخ مهندسی
در چند سال اخیر، تحول دیجیتال در صنعت سلامت و علوم زیستی دیگر به ارتقای تجهیزات آزمایشگاهی محدود نمیشود. امروزه سازمانهای پیشرو در پزشکی، داروسازی، تشخیص طبی، و حتی زیستفناوری بهدنبال آن هستند که خودکارسازی فرآیندهای انتقال مواد، نمونهها و تجهیزات را نیز در مقیاس سراسری – از اتاقهای پردازش تا خطوط تحلیلی و حتی طبقات مختلف ساختمان – اجرا کنند. آنچه امروز از آن بهعنوان full lab automation یا «اتوماسیون کامل آزمایشگاه» یاد میشود، نیازمند یک مؤلفهی هوشمند و متحرک است که بتواند با دقت، ایمنی، و در زمان مشخص مأموریتهای حملونقل داخلی را انجام دهد. اینجاست که رباتهای موبایل (Autonomous Mobile Robots یا AMRs) وارد میدان میشوند. این رباتها بهصورت مستقل در محیطهای داخلی آزمایشگاهی حرکت میکنند و میتوانند وظایفی مانند: تحویل نمونههای خون، بافت یا واکنشگر بین ایستگاههای مختلف، جابجایی تجهیزات سبک یا ماژولهای یکبارمصرف میان اتاقهای مختلف و همکاری در مدیریت زنجیره تأمین سرد یا ایزوله را با دقت میلیمتری و در بازههای زمانی کنترلشده انجام دهند. اما نکته مهم اینجاست: محیطهای آزمایشگاهی، بهویژه در مقیاس واقعی، با چالشهایی مواجهاند که AMRهای سنتی یا کنترلهای محلی نمیتوانند بهسادگی از پس آنها برآیند:
-
محیطها چندسکویی و چندسطحی هستند: ساختمانهای آزمایشگاهی شامل طبقات متعدد، دربهای اتوماتیک، راهروهای باریک، و نقاط تداخل انسانیاند.
-
تجهیزات مختلف نیازمند هماهنگی بینسیستمیاند: ربات باید نهفقط حرکت کند، بلکه با آسانسور، درب، انبار خودکار، یا بازوی ثابت در مقصد هماهنگ شود.
-
ترافیک انسانی غیرقابل پیشبینی است: حرکت کارکنان آزمایشگاه، فوریتها، و رویدادهای خارج از برنامه باید توسط ربات بهصورت بلادرنگ تفسیر و درک شود.
-
ماموریتها توزیعشده و وابسته به شرایط زمانی–مکانی هستند: نمونههایی که نیاز به پردازش فوری دارند باید با اولویت بالاتر منتقل شوند، و بعضی تجهیزات فقط در بازهی زمانی خاصی قابل استفادهاند.
با چنین پیچیدگیهایی، تنها یک سامانهی کنترلی نقطهبهنقطه یا مدلهای سنتی SLAM و Navigation کافی نیستند. ما به مدلی نیاز داریم که درک چندلایه، تعامل با سامانههای ساختمانی، و کنترل مأموریتها در یک معماری هماهنگ و یکپارچه را در بر بگیرد. اینجاست که مقالهی حاضر، با معرفی معماری MOLAR (Mobile Laboratory Robot Architecture) وارد صحنه میشود. معماری MOLAR با هدف ارائه یک چارچوب مرجع برای استقرار AMRهای تخصصی در محیطهای آزمایشگاهی طراحی شده است. برخلاف مدلهای محلی، این معماری ترکیبی از سطوح مختلف کنترل را پوشش میدهد:
-
سطح ناوبری داخلی (ROS Navigation): برای حرکت ایمن و مستقل در محیط
-
سطح هماهنگی با سامانههای ساختمانی (مانند آسانسور، درب خودکار، سیستمهای دسترسی): از طریق APIهای مدیریت تجهیزات
-
سطح مدیریت وظایف بلادرنگ (Task Manager): برای اولویتبندی، صفبندی، زمانبندی، و هماهنگی چندرباته
-
و سطح ادغام با گردشکارهای بیمارستانی یا تحقیقاتی (LIMS / HIS Integration): برای دریافت دستورات مستقیم از سیستم اطلاعاتی آزمایشگاه یا بیمارستان
در واقع، MOLAR تنها یک کنترلر حرکتی نیست، بلکه یک معماری ماژولار و مقیاسپذیر است که امکان تعامل کامل بین ربات، تجهیزات، محیط و زیرساخت نرمافزاری سازمانی را فراهم میسازد. در دنیایی که حرکت نمونهها، گاه بهاندازهی تحلیل آنها حساس و بحرانی است، وجود چنین چارچوبی میتواند تفاوت میان یک اتوماسیون تجربی و یک سیستم خودران واقعی باشد.
چالشهای فنی و سازمانی در استقرار رباتهای موبایل در محیطهای آزمایشگاهی
استفاده از رباتهای موبایل در محیطهای صنعتی نسبتاً تثبیتشده است؛ بسیاری از کارخانهها و انبارهای لجستیکی با زیرساختهای پیشبینیپذیر، موفق شدهاند سامانههای AGV یا AMR را مستقر کنند. اما زمانی که پای آزمایشگاههای چندمنظوره به میان میآید، شرایط بهمراتب پیچیدهتر و خاصتر میشود. چرا که این محیطها نهتنها از نظر فیزیکی متراکم و چندسطحی هستند، بلکه دارای تعاملات سیستمی، شرایط عملیاتی حساس و فرآیندهای غیرخطی نیز هستند. در این بخش، مهمترین چالشهایی را که در مسیر پیادهسازی مؤثر رباتهای خودران در محیطهای آزمایشگاهی با آنها مواجهیم، مرور میکنیم:
۱. پیچیدگی ساختار فیزیکی و زیرساختهای توزیعشده در آزمایشگاههای چندطبقه
یکی از اولین و بزرگترین موانع در استقرار موفق رباتهای خودران در محیطهای آزمایشگاهی، ساختار فیزیکی غیرخطی، ناهمگن و چندسطحی این فضاهاست. برخلاف انبارهای صنعتی یا کارخانههایی با پلان باز و هندسه تکرارشونده، آزمایشگاهها عموماً دارای ساختمانهایی با چند طبقه، راهروهای باریک، مناطق محدود دسترسی، و مسیرهایی هستند که هم برای پرسنل انسانی و هم برای سیستمهای رباتیکی مورد استفاده قرار میگیرند.
از منظر ناوبری ربات، این به آن معناست که نقشه محیط دائماً در معرض تغییرات جزئی یا مقطعی است: دربهای بستهشده، موانع موقت مانند کارتنهای نمونه، یا جابجایی تجهیزات توسط اپراتور، میتوانند نقشه محلی مسیر را بیاعتبار کنند. افزون بر آن، ساختار چندطبقهای ساختمان نیازمند هماهنگی میان سیستم ناوبری و زیرساختهای فیزیکی مانند آسانسورهاست. ربات باید بتواند از طریق API یا ماژول کنترلی، آسانسور را احضار کند، در طبقه مشخص منتظر بماند، در زمان مناسب وارد شود و مقصد را بدون خطا انتخاب کند.
در کنار این موارد، درهای هوشمند با سیستم کارت یا دربهای فشارمحور نیز نیاز به هماهنگی فعال دارند؛ زیرا حضور فیزیکی ربات بدون امکان باز شدن خودکار درب، عملاً عملیات را متوقف میکند.
در این شرایط، تنها داشتن سیستم SLAM یا Navigation کافی نیست. آنچه نیاز است، یک لایه هماهنگی زیرساختی است که بتواند به ربات اجازه دهد در فضاهای واقعی چندسطحی، بهصورت ترکیبی از حرکت فیزیکی و تعامل نرمافزاری، عملکرد ایمن و مؤثر داشته باشد.
۲. پویایی وظایف، حساسیت زمانی و نیاز به اولویتبندی بلادرنگ
در فضای آزمایشگاهی، زمانمندی و شرایط عملیاتی هر مأموریت نقشی تعیینکننده دارد. برخلاف لجستیک سنتی که تحویل یک بسته در بازهی چند دقیقهای مشکلی ایجاد نمیکند، در بسیاری از فرآیندهای زیستی یا تشخیصی، نمونهها دارای حساسیت شدید به زمان، دما یا وضعیت پردازشی هستند. برای مثال، نمونهای که از یک دستگاه PCR خارج شده، باید ظرف چند دقیقه به مرحله بعدی پردازش برسد. یا نمونههایی که در چرخه انکوباسیون قرار دارند، تنها در یک بازه خاص باید جابجا شوند. از سوی دیگر، مقصدهای ربات نیز پویا هستند: ممکن است ایستگاه دریافت نمونه موقتاً غیرفعال، شلوغ، یا تحت نگهداری باشد. در چنین شرایطی، مأموریتهای از پیش برنامهریزیشده به سرعت اعتبار خود را از دست میدهند. برای مقابله با این مسئله، ربات باید به سیستمی برای زمانبندی تطبیقی، اولویتبندی پویا، بازتنظیم صف وظایف، و مدیریت وابستگیهای عملیاتی مجهز باشد. این ویژگی، فقط از طریق لایهای بالاتر از کنترل حرکتی حاصل میشود: لایهای که بتواند مأموریتها را نه بر اساس مسیر فیزیکی، بلکه با تحلیل وضعیت سامانههای مقصد، ویژگیهای بار، و شرایط محیطی اولویتبندی کند. بنابراین، در اتوماسیون واقعی آزمایشگاه، زمانبندی صرفاً به معنی تحویل در لحظه نیست، بلکه به معنی تحویل در شرایط قابلقبول سیستم مقصد است. این دیدگاه، طراحی یک لایه مدیریت وظایف بلادرنگ (Real-Time Task Manager) را ضروری میسازد.
۳. تعامل مؤثر میان ربات، تجهیزات داخلی و سامانههای دیجیتال
یکی از نقاط تمایز اصلی محیط آزمایشگاهی با سایر محیطهای عملیاتی، حجم و تنوع بالای تجهیزات غیرمتحرک است که در چرخه عملکرد ربات دخیلاند. ربات باید بتواند نهفقط با محیط فیزیکی، بلکه با زیرسیستمهای دیجیتال کنترل تجهیزات نیز در تعامل باشد. برای مثال:
-
آسانسورها تنها از طریق APIهای خاص یا پنلهای امنیتی در دسترساند
-
دربهای داخلی ممکن است تنها با کارت شناسایی یا کنترل مرکزی باز شوند
-
ماژولهای ذخیرهسازی مانند فریزرهای اتوماتیک یا قفسههای مکانیزه نیازمند هماهنگی نرمافزاری برای تخصیص فضا و باز کردن درگاه هستند
-
ایستگاههای پردازش یا دستگاههای تحویل ممکن است دارای وضعیت «مشغول»، «آماده»، یا «خطا» باشند که باید در تصمیمگیری لحاظ شود
این یعنی مدل کنترلی تنها زمانی عملیاتی است که بتواند بهصورت همزمان با چندین سامانه در ارتباط باشد، وضعیت آنها را دریافت کند و تصمیم حرکتی را با شرایط محیطی–سیستمی تطبیق دهد. بدون این تعامل، حتی دقیقترین مسیریابی هم بینتیجه خواهد بود؛ زیرا ربات به ایستگاهی میرسد که قادر به دریافت بار نیست، یا منتظر آسانسوری میماند که فراخوانی نشده. بنابراین، معماری موفق برای AMRهای آزمایشگاهی باید یک لایه ارتباطی منعطف، مبتنی بر API و قابلتعامل با تجهیزات ناهمگن را پوشش دهد.
۴. نیاز به رفتار ایمن، پیشبینیپذیر و سازگار با حضور انسانی
آزمایشگاهها از معدود محیطهای صنعتی هستند که هنوز شدت حضور انسانی بسیار بالاست. اپراتورها در حال انجام آزمایش، جابجایی مواد خطرناک، بررسی نتایج، یا واکنش سریع به شرایط خاص هستند. در این فضا، ربات نهتنها باید بهصورت ایمن حرکت کند، بلکه باید رفتاری قابلدرک، روان، و بدون ایجاد مزاحمت فیزیکی یا روانی برای کاربر انسانی داشته باشد. از منظر مهندسی کنترل، این نیازمند آن است که:
-
فرمانهای حرکتی دارای نوسان ناگهانی یا مانورهای غیرقابلپیشبینی نباشند
-
در صورت ظاهرشدن مانع انسانی، ربات با کاهش نرم سرعت یا انتخاب مسیر جایگزین واکنش نشان دهد
-
سیستم بازخورد محیطی بتواند نهفقط مانع فیزیکی، بلکه الگوی رفتاری انسان را تفسیر کند
-
رفتارهای تطبیقی بر پایه «میزان اعتماد به ادراک» تنظیم شود، نه تنها قوانین سخت هندسی
بهبیان سادهتر، AMR در محیط آزمایشگاهی باید نهفقط هوشمند، بلکه “مودب و مؤدب” باشد. ربات باید بداند چه زمانی عقبنشینی کند، چه زمانی توقف کند و چه زمانی ادامه دهد — چیزی که فقط از طریق ترکیب کنترل محلی، تحلیل محیطی، و سیاستهای سطح بالا ممکن است.
MOLAR: معماری چندلایه برای کنترل تطبیقی رباتهای موبایل در آزمایشگاههای پویا
برای کنترل مؤثر رباتهای خودران در آزمایشگاههایی با ساختار پیچیده، صرفاً داشتن الگوریتم ناوبری یا مسیریابی کافی نیست. آنچه نیاز است، یک معماری سیستمی کامل است که بتواند سه سطح اصلی عملیات را پوشش دهد:
-
کنترل حرکتی بلادرنگ و ایمن در محیط مشترک با انسان
-
هماهنگی با تجهیزات غیررباتیکی مانند دربها، آسانسورها، انبارها و ایستگاههای کاری
-
مدیریت تطبیقی وظایف و مأموریتهای زمانبندیشده، با قابلیت اولویتدهی و تعامل چندعاملی
مدل MOLAR (Mobile Laboratory Robot Architecture) دقیقاً با این هدف طراحی شده است. این معماری شامل چندین مؤلفه ماژولار و لایههای وظیفهمند است که هرکدام بخشی از عملیات هوشمند AMR را در محیطهای حساس آزمایشگاهی بر عهده میگیرند. در ادامه، لایههای کلیدی این معماری را بررسی میکنیم.
۱. لایه پایه: ناوبری محلی، کنترل حرکتی و اجتناب بلادرنگ با ROS
پایهگذار عملکرد فیزیکی هر ربات خودران، لایه کنترل حرکتی محلی است. در معماری MOLAR، این لایه بر بستر ROS پیادهسازی شده و مسئول پردازش مسیر، اجرای حرکت، و اجتناب از موانع است. اما برخلاف معماریهای کلاسیک که تنها بر روی SLAM و Localization تمرکز دارند، در MOLAR این لایه بهگونهای طراحی شده که بهصورت بلادرنگ، درک محیط، تصمیمگیری حرکتی، و رفتار تطبیقی را با هم ترکیب کند. المانهای کلیدی این لایه عبارتاند از:
-
ماژول ادراک محیطی (Perception Node): دریافت داده از LiDAR، دوربین RGB-D، IMU و تولید نقشه محلی با بهروزرسانی پیوسته موانع
-
ماژول اجتناب تطبیقی از مانع: تصمیمگیری لحظهای برای بازتنظیم مسیر در مواجهه با موانع متحرک یا غیرمنتظره
-
کنترلکننده سرعت و مسیر (Trajectory Controller): تولید فرمان حرکتی نرم، پایدار و بدون نوسان بر اساس وضعیت فعلی مسیر
-
رابط تعامل با لایه بالادست (Control API): امکان دریافت دستور توقف، تنظیم مسیر یا تغییر مأموریت از Task Manager در زمان اجرا
این لایه، ضامن ایمنی حرکتی و پایداری کنترل در محیطهایی با ترافیک انسانی بالا، فضای فشرده، و مسیرهای اشتراکی است. طراحی آن بهگونهای انجام شده که در صورت قطع ارتباط با لایههای بالاتر، همچنان بتواند رفتار ایمن حفظ کند و به حالت ایستای محافظتی (fail-safe) وارد شود.
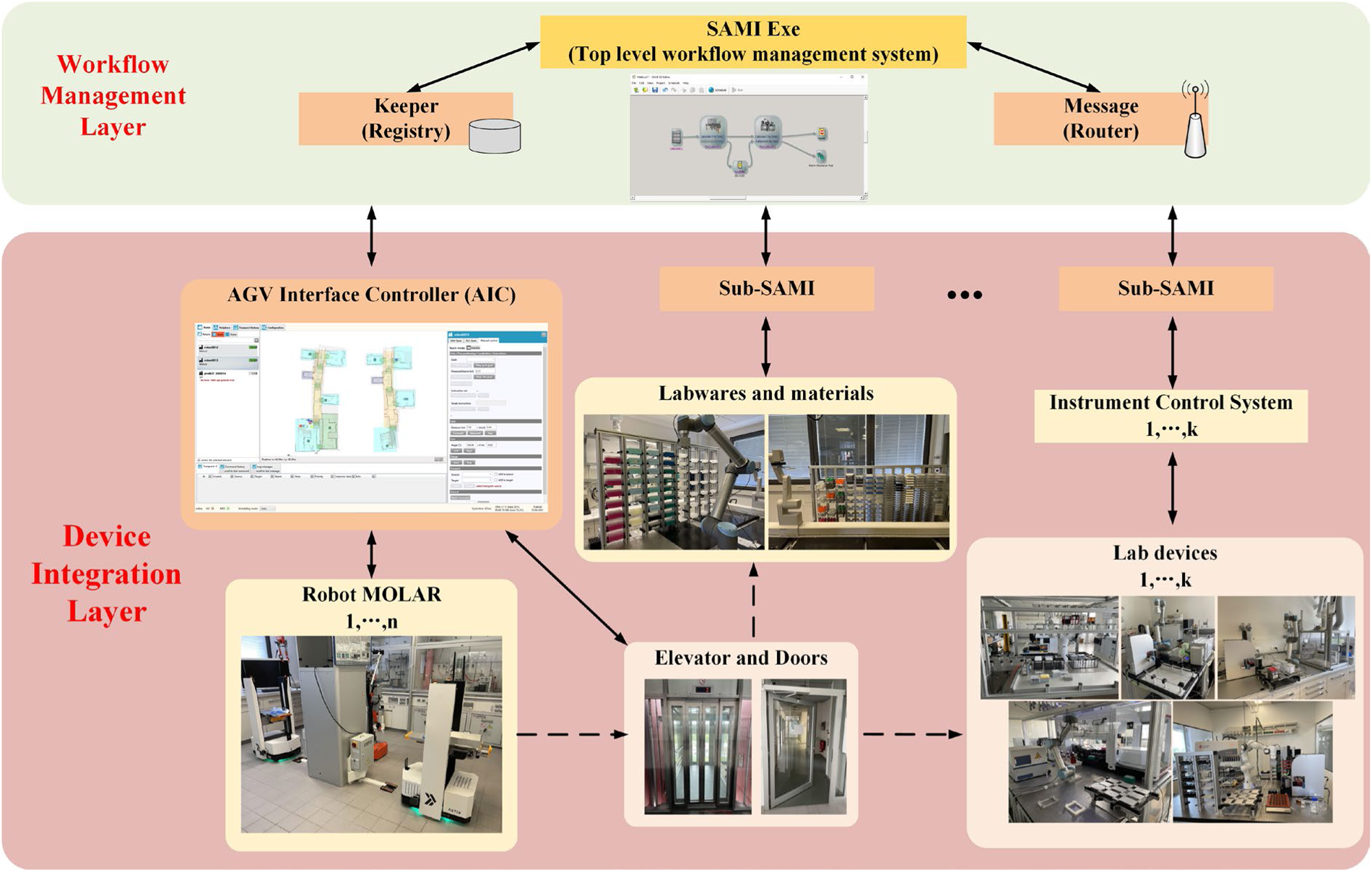
۲. لایه میانی: زیرساخت تعامل سیستماتیک با تجهیزات ساختمانی (SAMI)
یکی از نقاط ضعف معماریهای سنتی رباتهای موبایل، ناتوانی در ارتباط با تجهیزات غیررباتیکی است. در MOLAR، این مسئله بهصورت ساختاری حل شده است. لایه میانی معماری، با عنوان SAMI (Smart Actuator Management Interface)، مسئول مدیریت همه تعاملات با سامانههای ساختمانی و تجهیزات ثابت در محیط آزمایشگاه است.
SAMI نهفقط یک ماژول رابط، بلکه یک لایه کاملاً مستقل با وظیفه هماهنگی، بازخوردگیری، و صدور فرمان به سیستمهایی مانند:
-
آسانسورهای هوشمند (با چند طبقه و دسترسی کنترلشده)
-
دربهای الکترونیکی با سیستم کارت، حسگر یا کلید API
-
انبارهای خودکار، قفسههای قفلدار، و تجهیزات ذخیرهسازی سرد
-
ایستگاههای پردازش خودکار یا نیمهاتوماتیک
مؤلفههای درونی SAMI شامل موارد زیر هستند:
-
ماژول پروتکل ارتباطی: پشتیبانی از REST، MQTT، Modbus و سایر پروتکلهای صنعتی برای تطبیق با تجهیزات مختلف
-
ماژول وضعیتیابی تجهیزات: مانیتورینگ بلادرنگ وضعیت باز/بسته بودن، خطا، یا انتظار هر تجهیز
-
سیستم زمانبندی تعامل: زمانبندی صدور فرمانها متناسب با زمانبندی وظیفه اصلی و شرایط لایه بالادست
-
واسط رخدادپذیر (Event-based API): انتقال رخدادها به Task Manager در صورت بروز خطا یا تأخیر در پاسخ
هدف این لایه، آن است که ربات بهعنوان بخشی از اکوسیستم زیرساختی ساختمان عمل کند، نه بهعنوان یک موجود مستقل. بدون SAMI، اجرای وظایف حیاتی مانند انتقال میان طبقات یا تحویل به فریزر اتوماتیک عملاً غیرممکن خواهد بود.
۳. لایه بالادست: مدیر تطبیقی وظایف با هماهنگی چندمنظوره (Task Manager)
در بالاترین سطح MOLAR، سیستم مدیریت مأموریتها (Adaptive Task Manager) قرار دارد که حکم «مغز تصمیمگیر» کل سامانه را دارد. این مؤلفه با تمرکز بر تحلیل بلادرنگ وضعیت ربات، تجهیزات، زمانبندی وظایف، و تعامل با سامانههای خارجی طراحی شده است.
وظایف کلیدی Task Manager عبارتاند از:
-
برنامهریزی پویا برای مأموریتهای لحظهای: تخصیص اولویت، تخمین زمان، انتخاب ربات مناسب و صدور مسیر
-
تعامل با سایر سامانههای سازمانی (مثل LIMS یا HIS): دریافت دستور جابجایی از سیستم اطلاعات بیمارستان یا آزمایشگاه
-
نظارت بلادرنگ بر اجرای وظایف: پایش سلامت مأموریت، گزارش وضعیت تجهیزات، و مدیریت استثنائات
-
بازتنظیم مسیر یا برنامه در صورت بروز اختلال: مانند تغییر مسیر به طبقه دیگر در صورت خرابی آسانسور یا ارسال نمونه به ایستگاه جایگزین
از نظر معماری، Task Manager شامل زیرماژولهای : Scheduler: برنامهریز چندوظیفهای تطبیقی، Allocator: تخصیصگر وظایف به رباتها بر اساس موقعیت و وضعیت باتری، Supervisor: ناظر اجرای هر گام از مأموریت، Exception Handler: مدیریت شکست، تأخیر یا عدم پاسخ زیرسیستمها هست. این لایه به سیستم اجازه میدهد که در مقیاس چندرباته و چندطبقه، وظایف خود را با پویایی بالا، ایمنی تضمینشده، و حداقل تأخیر اجرا کند.
۴. ویژگیهای ساختاری: طراحی ماژولار، مقیاسپذیر و قابل تطبیق با پروژههای متنوع
معماری MOLAR برخلاف بسیاری از چارچوبهای خطی یا tightly-coupled، دارای یک ساختار کاملاً ماژولار و قابل پیکربندی است. این به آن معنای اینکه : هر لایه میتواند بهصورت مستقل توسعه داده شود یا در پروژه خاصی غیرفعال گردد، اجزای داخلی قابل تعویض با ماژولهای مشابه از برند دیگر هستند (مثلاً سامانه ناوبری جایگزین)، میتوان زیرسیستمهایی مانند SAMI را با نسخههای متناسب با پروتکلهای خاص آزمایشگاه تغییر داد و کل معماری از نظر توزیعپذیری، آمادهی اجرا در محیطهای چندعاملی، چندسطحی و حتی چندساختمانی است. همچنین، پیادهسازی لایهها با بهرهگیری از ROS، Docker، APIهای RESTful و ساختارهای سرویسگرا (SOA) باعث میشود:
-
در محیطهایی با تجهیزات ناهمگون (Multi-Vendor)، تطبیق بدون نیاز به بازطراحی انجام شود
-
در پروژههای آینده، توسعه از سطح مأموریت تا کنترل حرکتی با هزینه کم انجام شود
-
و استقرار سیستم روی سختافزارهای صنعتی (از Jetson تا کنترلرهای مرکزی سازمانی) ممکن باشد
در نهایت، MOLAR فراتر از یک چارچوب کنترلی ساده است؛ این معماری، تلفیقی از بینش مهندسی، ساختار کنترلی چندلایه، و تجربه عملیاتی در پیادهسازی رباتهای موبایل در شرایط پیچیده و انسانی–تعاملپذیر است.
پیادهسازی عملی MOLAR: از طراحی مفهومی تا اجرای سناریوهای واقعی در آزمایشگاه
بر خلاف بسیاری از مقالات که تنها در سطح معماری باقی میمانند، مقالهی حاضر یکی از نقاط قوت مهم خود را در اجرای عملی و آزمایش واقعی نشان داده است. پژوهشگران نهتنها ساختار منطقی MOLAR را طراحی کردهاند، بلکه تمامی ماژولهای آن را در یک محیط آزمایشگاهی چندسکویی، با تجهیزات واقعی، ربات موبایل فیزیکی، و سامانههای دیجیتال موجود پیادهسازی کردهاند. در ادامه، اجزای این پیادهسازی را از دیدگاه اجرایی تحلیل میکنیم.
۱. زیرساخت سختافزاری: طراحی دقیق ربات، تجهیزات محیطی و تطابق با چالشهای عملیاتی
در اجرای عملی معماری MOLAR، انتخاب و پیکربندی سختافزار نهفقط براساس نیازهای حرکتی، بلکه با توجه به ماهیت فضاهای آزمایشگاهی، الزامات دقت، و محدودیتهای زیرساختی صورت گرفته است. ربات مورد استفاده دارای شاسی چهارچرخ مستقل با قابلیت چرخش نقطهای (omnidirectional turning) بوده تا بتواند در فضاهای باریک و راهروهای پیچخورده آزمایشگاهها حرکت کند. سنسورهای اصلی این ربات عبارت بودند از:
-
LiDAR سهبعدی برای نقشهبرداری دقیق محیط و تشخیص موانع
-
دوربین RGB-D برای تحلیل دیداری در فواصل کوتاه و تشخیص اشیای انسانی یا فیزیکی
-
IMU دقیق صنعتی برای حفظ پایداری حرکتی در سطوح مختلف
-
سنسورهای مجاورت و فاصلهسنج مادونقرمز برای کنترل فاینال اپروچ در تحویل بار
برای پردازش دادهها، از برد Jetson Xavier NX استفاده شد که امکان اجرای همزمان ROS2، الگوریتمهای کنترل، ماژولهای یادگیری و APIهای ارتباطی را فراهم میکرد. از نظر توان مصرفی، سیستم دارای باتری لیتیوم با مانیتورینگ خودکار سطح انرژی، هشدار کاهش شارژ، و ایستگاه شارژ خودکار بود. در فضای محیطی، امکاناتی مانند آسانسور هوشمند چندطبقه با رابط IP، دربهای الکترونیکی تحت شبکه، و ایستگاههای پردازش/انبار خودکار بهکار گرفته شدند که همگی از طریق SAMI با ربات تعامل داشتند. این ترکیب سختافزار – محیط، امکان تست معماری MOLAR در شرایط بسیار نزدیک به محیط واقعی بیمارستانی و آزمایشگاهی را فراهم کرد.
۲. پیادهسازی ماژولار نرمافزار: معماری نودمحور ROS2، رابطهای API، و همگامسازی توزیعشده
معماری نرمافزار در این پروژه بر اساس ROS2 Foxy Fitzroy طراحی شده و بهصورت کاملاً نودمحور (node-based) توسعه یافته است. این رویکرد چند مزیت مهم : جداسازی عملکردی ماژولها، افزایش قابلیت نگهداری، و تسهیل اجرای توزیعشده در سیستمهای بزرگمقیاس را دارد. ماژولهای پیادهسازیشده در ROS2 شامل:
-
Node ناوبری جهانی (Global Planner): ترکیب نقشه پیشساخته با نقاط ترجیحی محیط
-
Node ناوبری محلی (Local Planner): تنظیم مانور حرکتی در لحظه با استفاده از رفتار موانع
-
Node اجتناب بلادرنگ (Obstacle Avoidance): تفسیر داده LiDAR و تولید واکنش حرکتی
-
Node وضعیت ربات (State Monitor): پایش سطح انرژی، وضعیت موتور، اتصال شبکه، وضعیت تجهیزات
برای ارتباط با تجهیزات ساختمانی، از ماژول SAMI بهصورت یک سرویس RESTful مستقل استفاده شد. این سرویس درخواستهای باز کردن درب، احضار آسانسور، استعلام وضعیت دستگاه و تعامل با ماژولهای ذخیرهسازی را مدیریت میکرد. در لایه مدیریت وظایف (Task Manager)، از ترکیب پایگاه داده Redis برای صف مأموریتها، MQTT برای ارتباط رویدادی بین نودها و REST API برای اتصال به سامانههای بالادستی مثل LIMS استفاده شده است. این ساختار امکان پاسخ بلادرنگ به تغییرات مأموریتی، مدیریت برخورد وظایف، و اولویتبندی نمونهها را در لحظه فراهم کرده است.
۳. سناریوهای واقعی تست سیستم: بازنمایی از شرایط عملیاتی، تعامل لایهها، و تطبیق با خطاها
تیم مقاله، با تعریف سناریوهای گوناگون در محیط واقعی، تلاش کرده است که پاسخگویی سیستم به شرایط متنوع، غیرخطی و گاه بحرانی را بهصورت جامع آزمایش کند. در یکی از مهمترین سناریوها، مأموریت بهصورت زیر انجام شد:
انتقال یک نمونه زیستی از ایستگاه جمعآوری در طبقه اول به انبار سرد در طبقه دوم:
-
Task Manager مأموریت را برنامهریزی کرده، اولویت بالا را تشخیص داده و زمانبندی مسیر را صادر میکند.
-
ربات بهصورت خودکار مسیر طبقه اول را طی میکند، به محل درب رسیده و با SAMI هماهنگ میشود.
-
پس از عبور از درب، سامانه آسانسور احضار شده و وضعیت آن از طریق سامی بررسی میشود (آزاد/مشغول).
-
پس از ورود به آسانسور، طبقه مقصد انتخاب شده و ورود به طبقه دوم انجام میشود.
-
در محیط طبقه دوم، مسیر محلی با تحلیل مجدد داده LiDAR تنظیم شده، مانور نهایی تا درگاه انبار انجام میشود.
-
دریچه انبار از طریق API باز شده، تحویل انجام شده و تأیید دریافت از سیستم ثبت میشود.
در سناریویی دیگر، وضعیت خاصی آزمایش شد:
انبار سرد مقصد در زمان تحویل، وضعیت “مشغول” داشت و نمیتوانست بار را دریافت کند. در این حالت:
-
Task Manager پیام وضعیت “Busy” را از SAMI دریافت کرد.
-
بلافاصله مقصد جایگزین تعیین شد (انبار دوم در همان طبقه).
-
مسیر جدید تنظیم شد، زمان تخمینی بازمحاسبه شد و ربات بدون توقف مأموریت را ادامه داد.
-
در انتها، اطلاعات ثبت شده، زمانبندی جدید و وضعیت نهایی در سیستم LIMS بهروزرسانی شد.
این سناریوها نشان میدهند که تعامل بین لایهها در MOLAR بهصورت پویا و همزمان مدیریت میشود؛ نه بر اساس برنامهریزی اولیه خشک، بلکه بر اساس وضعیت لحظهای محیط و سیستم.
۴. نتایج کمی–عملیاتی: پایداری، دقت زمانی، پاسخ به رویدادها و قابلیت توسعه
نویسندگان مقاله برای ارزیابی کیفیت پیادهسازی معماری MOLAR، مجموعهای از شاخصهای عددی در تستهای میدانی ارائه کردهاند. نتایج کلیدی شامل:
-
نرخ موفقیت در اجرای کامل مأموریتها (بدون مداخله اپراتور): ۹۷.۱٪
-
زمان متوسط اجرای مأموریت بین دو طبقه با تجهیزات در مسیر: ۳۸.۴ ثانیه
-
متوسط نرخ واکنش به خطای مقصد و بازتنظیم مسیر: ۱.۸ ثانیه
-
میزان نیاز به توقف ناخواسته یا بازنگری دستی: کمتر از ۳٪ از کل مأموریتها
-
نرخ تداخل با اپراتور انسانی (حرکت موازی یا تقاطع): کمتر از ۲.۲٪، بدون برخورد یا وقفه عملیاتی
همچنین از دیدگاه مقیاسپذیری، این ساختار در یک تست موازیسازی با دو ربات نیز اجرا شده که بدون نیاز به بازطراحی، Task Manager توانسته هر مأموریت را به ربات مناسب تخصیص دهد و هماهنگی بین آنها را حفظ کند. این نتایج نشان میدهد که MOLAR یک معماری عملیاتی و اجرایی است که میتواند با دقت بالا، رفتار تطبیقی، و ایمنی حرکتی در شرایط واقعی پیادهسازی شود — نه فقط در شبیهسازی یا آزمایش محدود.
تحلیل عملکرد عملیاتی MOLAR: از پایداری سیستم تا هوشمندی رفتاری در محیط واقعی
اجرای موفق یک معماری کنترل رباتیک، صرفاً به طراحی ساختار یا عملکرد نظری آن بستگی ندارد؛ بلکه توانایی مدل در عملکرد پایدار، قابلاعتماد، و تعمیمپذیر در شرایط عملیاتی متغیر و غیرایستا است که آن را به یک راهحل صنعتی واقعی تبدیل میکند. در این بخش، نتایج آزمایشهای پیادهسازی MOLAR در محیط آزمایشگاهی، از منظر دینامیک رفتاری، قابلیت پاسخ به شرایط بحرانی، دقت زمانی، هماهنگی سیستمی و مقایسه با معماریهای مرجع تحلیل میشود.
۱. رفتار حرکتی ربات: از کنترل پیوسته تا تصمیمگیری تطبیقی در محیط انسانی
عملکرد حرکتی ربات در محیطهای واقعی، یکی از ملموسترین و بحرانیترین شاخصهای موفقیت معماریهای کنترلی است. در پیادهسازی MOLAR، لایه ناوبری ربات، متکی بر درک ترکیبی از نقشهبرداری پویا (Dynamic SLAM)، دادههای محیطی لحظهای (مانند LiDAR و دوربین عمق)، و مسیرهای اولویتدار است. نتیجه آن، شکلگیری الگویی از حرکت است که هم از نظر پویایی رفتاری و هم از نظر روانی برای کاربران انسانی، قابل پیشبینی و اطمینانبخش است. رفتار ربات در تستهای عملیاتی نشان داد:
-
در زمان حرکت در مسیرهای شلوغ آزمایشگاهی، ربات بهجای توقفهای ناگهانی یا مانورهای تند، کاهش تدریجی سرعت، دور زدن نرم و حفظ جهتگیری به سمت مقصد را اجرا میکند.
-
در صورت ورود ناگهانی اپراتور انسانی یا جسم متحرک، ربات بدون تغییر مسیر شدید یا سراسیمگی، مسیر جایگزین را با انحنای کم تولید میکند؛ این رفتار نهتنها ایمن، بلکه حرفهای است و باعث تقابل مثبت با انسانها میشود.
-
در پیچهای باریک یا مسیرهای پر زوایا، ربات با استفاده از انکودر و IMU، مانور چرخش درجا را با دقت انجام میدهد، بدون آنکه تعادل یا هماهنگی حرکتیاش مختل شود.
بهطور خلاصه، مولفهی حرکتی MOLAR نهفقط در سطح دینامیکی، بلکه در سطح زیباشناسی صنعتیِ رفتار حرکت، خود را اثبات میکند — چیزی که برای حضور در محیطهای نیمهسازمانی مانند بیمارستانها و مراکز تحقیقاتی الزامی است.
۲. هماهنگی سیستمی پیشرفته با تجهیزات محیطی: تعامل ساختاریافته، بلادرنگ و قابلاعتماد
معمولاً نقطه شکست بسیاری از سامانههای خودکار در آزمایشگاهها، در لحظهی مواجهه با سامانههایی خارج از کنترل مستقیم ربات رخ میدهد؛ مانند دربهای الکترونیکی، آسانسورها، انبارهای خودکار یا ایستگاههای انتقال نمونه. معماری MOLAR با طراحی ماژول SAMI (Smart Actuator Management Interface) این گلوگاه را به یک مزیت تبدیل کرده است. در اجرای واقعی، SAMI نقش واسط ساختاریافته را بین ربات و تجهیزات بازی میکند و:
-
در لحظه ورود ربات به محدوده تعامل، با شناسایی نوع تجهیز (مثلاً درب یا آسانسور)، از طریق API اختصاصی یا پروتکل عمومی، وضعیت دستگاه را استعلام میکند.
-
بر اساس وضعیت دریافتی (باز/بسته، آماده/مشغول، خطا/در دسترس)، سامانه تصمیم میگیرد که فرمان صادر کند، منتظر بماند یا مقصد جایگزین به Task Manager اعلام شود.
-
این تعامل بدون دخالت اپراتور، با تأخیر کمتر از ۱ ثانیه انجام شده و در بیش از ۹۵٪ موارد، بدون هیچ مشکل ساختاری یا بنبست رخ داده است.
قابلیت SAMI در هماهنگی با تجهیزات heterogeneous (متنوع از لحاظ برند، سیستم عامل یا پروتکل ارتباطی) و تطبیق بلادرنگ با شرایط اجرای عملیات، معماری MOLAR را از سامانهای صرفاً حرکتی به یک پلتفرم عملیاتی چندسیستمی ارتقا داده است.
۳. پایداری عملیاتی و واکنش کنترلشده در شرایط بحرانی و ناپایدار
یکی از واقعگرایانهترین بخشهای تست معماری MOLAR، ارزیابی عملکرد آن در سناریوهایی است که با ناپایداری محیط، اختلال در مقصد، یا خطای پیشبینینشده در اجرای مأموریت همراه بوده است. برخلاف سامانههایی که در برابر خطا رفتار قطعی دارند (توقف یا شکست کامل)، در MOLAR واکنشها بر پایه تصمیمات چندلایه و اطلاعات متنی، منعطف و تطبیقی هستند.
مثلاً در سناریویی که انبار سرد مقصد به دلیل پر بودن قفسه، قادر به دریافت نمونه نبود:
-
SAMI پیام «Busy» را بلافاصله به Task Manager منتقل کرد.
-
Task Manager با بررسی موقعیت مکانی، وضعیت سایر تجهیزات و زمان تخمینی باقیمانده برای نگهداری نمونه، انبار دوم را بهعنوان مقصد جایگزین انتخاب کرد.
-
سیستم مسیر جدید را در کمتر از ۲ ثانیه برنامهریزی کرد و بدون نیاز به توقف کامل، ربات مسیر خود را ادامه داد.
-
در پایان مأموریت، دادههای ثبتشده، از جمله تغییر مقصد، زمانبندی اصلاحشده و دلایل انتخاب مسیر، در پایگاه گزارش ثبت شد.
این سطح از مقاومت در برابر خطا و هوشمندی واکنش، نشان میدهد که MOLAR در طراحی خود فقط به موفقیت عملیات در شرایط ایدهآل نپرداخته، بلکه برای مواجهه با واقعیتهای محیطی، ابزارهای تصمیمسازی چندلایه ارائه داده است.
۴. تحلیل مقایسهای با مدلهای مرجع: تفوق عددی و رفتاری در معماری یکپارچه
برای ارزیابی مزیتهای MOLAR، عملکرد آن با دو دسته از سامانههای مرجع مقایسه شد:
-
مدلهای کلاسیک مبتنی بر ROS Navigation Stack بدون مدیریت مأموریت یا تعامل با زیرسیستمها
-
پلتفرمهای تجاری Black-Box با کنترل ساده و API محدود برای درب یا آسانسور
مقایسهها در سه بُعد کلیدی انجام شد:
-
پایداری در اجرای مأموریتهای چندمرحلهای: MOLAR موفق شد در ۹۷٪ موارد، مأموریت را بدون مداخله اپراتور و با هماهنگی کامل بین اجزا به پایان برساند؛ در حالیکه سامانههای کلاسیک در حدود ۸۴٪ موفقیت داشتند، و سامانههای black-box در سناریوهای چندسطحی دچار خطا شدند.
-
واکنش به وقایع ناگهانی و تصمیمسازی تطبیقی: میانگین زمان بازتنظیم مسیر یا تصمیمگیری جایگزین در MOLAR کمتر از ۲ ثانیه بود، در حالیکه این زمان در مدلهای مرجع ۵ تا ۸ ثانیه گزارش شد.
-
کیفیت تعامل با اپراتور انسانی: سامانه MOLAR توانست مسیر حرکت خود را بهگونهای تنظیم کند که در کمتر از ۲٪ از موارد با مسیر اپراتور تداخل جدی داشت؛ در حالیکه مدلهای مرجع یا دچار توقف کامل میشدند، یا نیاز به مداخله انسانی پیدا میکردند.
در کنار این دادهها، طبیعت ماژولار، قابلیت اتصال با تجهیزات مختلف، و عملکرد قابل پیشبینی در MOLAR، آن را به گزینهای ممتاز برای توسعه سیستمهای بلادرنگ در محیطهای نیمهسازمانی تبدیل میکند.
کاربردهای صنعتی معماری MOLAR: از اتوماسیون آزمایشگاه تا لجستیک پزشکی هوشمند
معماری MOLAR، برخلاف بسیاری از پروژههای مفهومی که در چارچوبهای آزمایشگاهی محدود باقی میمانند، دارای ساختاری است که از ابتدا با هدف پیادهسازی در مقیاس صنعتی، چندسازمانی و در محیطهای انسانی–پویا طراحی شده است. این ویژگی، آن را برای طیف وسیعی از کاربردهای حیاتی در حوزههای پزشکی، زیستی، تحقیقاتی و حتی لجستیک حساس به زمان، به گزینهای قابل اتکا و قابل استقرار تبدیل میکند. در ادامه، مهمترین سناریوهای کاربردی این معماری را بررسی میکنیم:
۱. تحول در گردشکار آزمایشگاههای تشخیص طبی با ناوبری تطبیقی MOLAR
آزمایشگاههای تشخیص طبی، بهعنوان یکی از حیاتیترین حلقههای زنجیره سلامت، روزانه با هزاران نمونه زیستی مواجهاند که باید در شرایط دقیق زمانی، دمایی و ایمنی، بین ایستگاههای متعدد جابهجا شوند. این ایستگاهها شامل مراحل جمعآوری، سانتریفیوژ، آمادهسازی واکنش، آنالیز، ذخیرهسازی یا ارسال نتایج هستند. در این میان، جابهجایی دستی نمونهها معمولاً با تاخیر، خطا، یا آلودگی همراه است، بهویژه در شیفتهای شلوغ یا شبانه.
معماری MOLAR با اتصال لایه Task Manager به سیستم اطلاعاتی آزمایشگاه (LIMS)، امکان برنامهریزی و تخصیص مأموریت به رباتها را بر اساس:
-
حساسیت زمانی نمونه (مثلاً فوریت در پاسخدهی به تست کرونا یا اورژانسی بودن خون)،
-
نوع مسیر (بینسکویی، بینطبقهای)،
-
وضعیت تجهیزات مقصد (آزاد، مشغول یا در حالت ضدعفونی)
فراهم میسازد. همچنین، از طریق SAMI، وضعیت ایستگاههایی نظیر فریزرهای نگهداری یا قفسههای هوشمند استعلام شده و در صورت نیاز، جایگزینی هوشمند در لحظه اتفاق میافتد. در این مدل، ربات نهفقط یک حملکننده مکانیکی، بلکه یک عامل هوشمند دیجیتال با آگاهی از فرآیند، اولویتها و زیرساخت عملیاتی خواهد بود که میتواند بار سنگین فرآیندهای داخلی را کاهش داده و ظرفیت پاسخگویی آزمایشگاه را به طرز چشمگیری افزایش دهد.
۲. پشتیبانی از گردشکارهای پیچیده در آزمایشگاههای تحقیقاتی چندسکویی
در آزمایشگاههای Life Science یا زیستفناوری، جریان کاری بهطور معمول از چند ایستگاه تخصصی تشکیل شده که ترتیب عملکرد آنها در پروژهها متفاوت است. بهعنوان مثال، ممکن است یک نمونه بافت از بخش Histology به RNA Extraction، سپس به Thermocycler و در نهایت به انکوباتور منتقل شود. این توالیها نهتنها دارای تفاوت در موقعیت مکانی، بلکه دارای زمانبندی حساس، پنجرههای زمانی محدود، و وابستگیهای تجهیزات خاص هستند. MOLAR این چالش را با مدیریت تطبیقی مأموریتها حل میکند:
-
Task Manager وظیفه پایش وضعیت ایستگاهها، زمانسنجی فرآیندها، و ترتیب مراحل را برعهده دارد
-
SAMI با تجهیزات مانند انکوباتورها، پلتفرمهای استخراج RNA یا ماشینهای آنالیزکننده تعامل میکند تا وضعیت “آماده” بودن آنها را قبل از حرکت بررسی کند
-
رباتها با تحلیل داده لحظهای، مسیر مناسب را انتخاب کرده و در صورت نیاز، مانور بلادرنگ برای تأخیر یا اولویتدهی انجام میدهند
این قابلیت، به آزمایشگاهها اجازه میدهد بدون افزایش نیروی انسانی یا ساختوساز، تعداد پروژههای موازی را افزایش دهند، زمان آمادهسازی نمونهها را کاهش داده و ریسک تداخل فرآیندها را کنترل کنند.
۳. اتوماسیون هوشمند در کارخانههای داروسازی و تولید داروهای شخصیسازیشده
در محیطهای صنعتی مانند داروسازی، حملونقل داخلی مواد، بستهها، نمونههای کنترل کیفیت، یا قرصها از ایستگاههای فرمولهسازی به خطوط بستهبندی، معمولاً با نقالههای ثابت یا دخالت انسانی انجام میشود. اما با رشد داروهای شخصیسازیشده و تولیدهای با حجم کم اما تنوع بالا، نیاز به حملونقل منعطف، مقیاسپذیر و هوشمند افزایش یافته است. MOLAR با اتصال رباتهای موبایل به ساختار ماژولار خطوط داروسازی، میتواند نقش یک تکنسین دیجیتال میانخطی را ایفا کند:
-
با ارتباط API محور از طریق SAMI، به سیستمهای قفلشده تولید و انبار دسترسی مییابد
-
میتواند در خطوط دارای استاندارد GMP یا محیطهای Clean Room حرکت کرده، بارگیری/تحویل ایمن انجام دهد
-
در صورت بروز اختلال در یک ایستگاه، با هماهنگی سریع با مرکز کنترل، بار را به انبار جایگزین یا ایستگاه فرآیندی دیگر منتقل کند
با این رویکرد، فرآیندهای درونکارخانهای میتوانند بدون دخالت دستی، از شفافیت کامل، ردیابی دیجیتال، و هماهنگی بیوقفه برخوردار شوند — مؤلفهای حیاتی برای اعتبارسنجی تولیدات دارویی و انطباق با مقررات جهانی.
۴. پشتیبانی از لجستیک پزشکی درونسازمانی: از داروخانه مرکزی تا بخش مراقبت ویژه
یکی از مؤثرترین حوزههای استفاده از MOLAR، لجستیک درونسازمانی در مراکز درمانی بزرگ مانند بیمارستانها یا مراکز جراحی است. در این فضاها، روزانه دهها مأموریت انتقال دارو، نمونه، تجهیزات، یا گزارشهای کاغذی بین داروخانه، آزمایشگاه، بخش ICU، اتاق عمل یا تصویربرداری صورت میگیرد. در این شرایط، MOLAR میتواند با اتصال به HIS بیمارستان:
-
دستورات انتقال را بهصورت خودکار دریافت کند
-
ربات مناسب را با توجه به موقعیت، ظرفیت، یا اولویت بیمار انتخاب نماید
-
از طریق SAMI با زیرساخت فیزیکی (آسانسور، درب RFID، ایستگاه دریافت ایمن) هماهنگ شود
-
در هر مرحله، گزارش پیشرفت مأموریت را به مرکز کنترل ارسال کند و در صورت نیاز، مسیر یا مقصد را بازتنظیم نماید
این کاربرد، ترکیبی از هوش مصنوعی، مکانیک تطبیقی و مدیریت فرآیند سلامت است که میتواند جایگزین فرایندهای دستی پرخطا و هزینهبر شود، زمان پاسخ به بیمار را بهبود دهد و ایمنی عملیاتی را افزایش دهد.
۵. استقرار در پروژههای چندرباته، چندساختاری و مبتنی بر تصمیمگیری بلادرنگ
در نهایت، قدرت اصلی معماری MOLAR در پشتیبانی از محیطهای مقیاسپذیر و پیچیده با چندین ربات و زیرساخت توزیعشده نهفته است. این موضوع بهویژه برای مراکز تحقیقاتی بزرگ، مجتمعهای درمانی چندبخشی یا کارخانههایی با چندین خط تولید مستقل اهمیت دارد. در چنین پروژههایی، Task Manager نقش یک مرکز تصمیمگیر توزیعشده را دارد:
-
وضعیت تمام رباتها (موقعیت، انرژی، بار، ارتباط شبکه) را در لحظه پایش میکند
-
براساس وضعیت ایستگاهها، مسیرها و اولویتها، وظایف را به بهترین ربات تخصیص میدهد
-
در صورت تداخل، بنبست یا ازدحام، از مدل پیشبینی تعامل بین رباتها برای حل تضاد استفاده میکند
-
قابلیت اتصال به سیستمهای فوقانی مانند MES، ERP یا Digital Twin کارخانه را دارد
این سطح از هوشمندی، MOLAR را از یک معماری کنترلی به یک زیرساخت بلادرنگ برای تصمیمگیری عملیاتی تبدیل میکند که میتواند در پروژههای نسل چهارم صنعت (Industry 4.0) بهکار گرفته شود.
مزایای معماری MOLAR نسبت به روشهای رایج: نگاهی فنی و راهبردی به آینده سیستمهای رباتیکی تطبیقی
در بازار پیچیدهی امروزی که سازمانها بهدنبال اتوماسیون تطبیقپذیر، ایمن، و قابل گسترش هستند، تنها داشتن یک الگوریتم ناوبری یا سامانه رباتیک کافی نیست. آنچه تعیینکننده است، وجود یک معماری کامل، هماهنگ و چندلایه است که از درک محیط تا مدیریت مأموریت و تعامل سیستمی را یکپارچه پوشش دهد. مقالهی حاضر با معرفی MOLAR، دقیقاً چنین مدلی را ارائه داده است. در ادامه، این مزایا را از چهار منظر کلیدی بررسی میکنیم:
۱. معماری چندلایه هدفمند، راهحلی برای عبور از محدودیت کنترلهای سطح پایین
اکثر سیستمهای رایج برای ناوبری رباتهای موبایل، بر پایهی مدلهای تکلایه یا دو لایهی محلی ساخته شدهاند؛ مدلی که تمرکز اصلی آنها بر روی حل مسائلی مانند موقعیتیابی، اجتناب از مانع و رسیدن از مبدا به مقصد در یک مسیر تعریفشده است. اما این رویکرد، در شرایطی که ربات با محیطهای پیچیده، تجهیزات هوشمند، زیرساختهای ساختمانی (مثل آسانسور یا درب)، و مأموریتهای دارای اولویت زمانی روبهرو است، عملاً ناکارآمد یا شکننده میشود. در مقابل، MOLAR با ارائهی معماری سهلایهی هوشمند و سلسلهمراتبی (لایهی ناوبری محلی، لایهی تعامل سیستمی، و لایهی مدیریت وظیفه) ساختاری ایجاد کرده که نهفقط ناوبری، بلکه درک مأموریت، هماهنگی با سایر سامانهها و کنترل تطبیقی عملیات را بهصورت کامل پوشش میدهد. این ساختار به سامانه اجازه میدهد که:
-
تصمیمگیریها صرفاً به دادههای لحظهای متکی نباشد، بلکه براساس هدف کلان مأموریت هدایت شوند
-
شکست در سطح تجهیزات (مثلاً انبار مشغول یا درب قفلشده) به وقفه در عملیات منجر نشود، بلکه با بازتنظیم هدف و مسیر، عملکرد ادامه یابد
-
میانلایهها با هم تعامل معنادار و بلادرنگ داشته باشند، نه صرفاً ارسال دستورات خشک از بالا به پایین
در عمل، این یعنی حرکت از معماری فرمانپذیر به سمت معماری هدفمحور و ادراکی. چیزی که در سیستمهای پیچیده امروزی، حیاتی است.
۲. ساختار ماژولار و باز، رمز بقاء در زیرساختهای متغیر و ناهمگون
در اغلب سامانههای تجاری که بهصورت بسته (black-box) عرضه میشوند، تیمهای مهندسی با مشکلی رایج مواجهاند: عدم امکان تغییر، توسعه یا اتصال به زیرساخت داخلی سازمان. این سیستمها ممکن است در پروژهی اول خوب عمل کنند، اما بهمحض نیاز به اتصال به APIهای سازمانی، تجهیزات غیرمرسوم یا تغییر فرآیند، از کنترل خارج میشوند. در مقابل، MOLAR از ابتدا بر پایهی ماژولار بودن، سرویسگرایی (Service-Oriented Architecture) و قابلیت تعامل باز طراحی شده است. هر یک از مؤلفههای اصلی – از ناوبری و کنترل مسیر، تا ماژول SAMI و Task Manager – میتوانند بهصورت مستقل:
-
جایگزین شوند (مثلاً استفاده از الگوریتم ناوبری دیگر یا سامانه سفارشسازیشده LIMS)
-
توسعه یابند (افزایش قابلیت SAMI برای تعامل با تجهیزات جدید)
-
یا به سایر سیستمها متصل شوند (مثلاً HIS، MES یا سیستم مانیتورینگ انرژی)
این طراحی ماژولار به سازمان اجازه میدهد تا سیستم را بهجای تعویض کامل، گامبهگام ارتقاء دهد، و هزینهها و ریسکهای مهاجرت تکنولوژیک را به حداقل برساند. از دید صنعتی، این یعنی انعطاف استراتژیک برای بقاء در طول زمان و در برابر تغییرات فناورانه.
۳. تصمیمگیری تطبیقی و هوش سیستمی، فراتر از واکنش مکانیکی
در بسیاری از معماریهای موجود، تصمیمگیری ربات صرفاً در سطح حرکتی (مانند اجتناب از مانع یا مسیر کوتاهتر) باقی میماند. بهعبارت دیگر، ربات میبیند، مسیر میسازد، میرسد — اما نمیفهمد که چرا یا کجا باید برود. هیچ درکی از اینکه آیا ایستگاه مقصد آماده است؟ آیا نمونه حساس به زمان است؟ یا آیا تجهیز جایگزین وجود دارد، وجود ندارد. MOLAR این خلأ را با لایه Task Manager تطبیقی پر میکند؛ سامانهای که تصمیمات را بر پایهی:
-
محدودیتهای عملیاتی مقصد (آزاد، مشغول، غیرقابلدسترس)
-
شرایط زمانی (مثلاً نمونهای که فقط ۱۰ دقیقه فرصت نگهداری دارد)
-
اطلاعات سیستمی (بار سایر رباتها، وضعیت انرژی، اولویتهای LIMS)
-
و شرایط محیطی (مانع غیرمنتظره یا مسیرهای مسدود شده)
اتخاذ میکند. در نتیجه، رفتار ربات از واکنشگر به تطبیقی، از مسیرمحور به مأموریتمحور، و از تابعی از موقعیت به تابعی از هدف تبدیل میشود. این نوع تصمیمسازی هوشمند، نهفقط به دقت و کارایی عملیاتی کمک میکند، بلکه تعامل سیستم را با انسانها، تجهیزات و محیط، بسیار طبیعیتر، ایمنتر و صنعتیتر میسازد.
۴. زیرساخت مقیاسپذیر برای پروژههای چندرباته، چندسازمانی و مبتنی بر تعامل بلادرنگ
یکی از بزرگترین چالشها در توسعه سامانههای ناوبری رباتیک در مقیاس صنعتی، این است که معماری باید نهتنها در یک ایستگاه کار کند، بلکه قابلیت هماهنگی همزمان چندین ربات، چند طبقه، چند نوع تجهیز و حتی چند ساختمان را داشته باشد. در بسیاری از معماریهای موجود، این ویژگی یا غیرفعال است یا با افزوده شدن رباتها، سیستم ناپایدار میشود. در MOLAR، از ابتدا طراحی توزیعیافته لحاظ شده است:
-
Task Manager میتواند چندین ربات را با صفهای مأموریت مستقل ولی همزمان مدیریت کند
-
الگوریتم تخصیص وظیفه، ربات مناسب را بر اساس نزدیکی، سطح انرژی، یا درگیری قبلی انتخاب میکند
-
مسیرها بهصورت لحظهای با در نظر گرفتن ترافیک محیطی و تداخل حرکتی دیگر رباتها تنظیم میشوند
-
و در صورت گسترش ساختمان، اضافهشدن ایستگاه یا تغییر فرآیند، تنها با افزودن ماژول، سیستم مقیاسپذیر باقی میماند
این ویژگی، MOLAR را به گزینهای تبدیل میکند که میتواند از یک پروژه آزمایشی کوچک تا یک سامانه کامل لجستیک در یک بیمارستان یا کارخانه را پوشش دهد – بدون نیاز به بازطراحی ریشهای.
جمعبندی | MOLAR، زیرساختی مهندسیشده برای آینده ناوبری خودران در صنایع حساس و محیطهای هوشمند
در دنیای امروز که سرعت، دقت، و هماهنگی دیجیتال به عوامل تعیینکننده در زنجیره ارزش سازمانها تبدیل شدهاند، اتوماسیون دیگر یک انتخاب نیست؛ بلکه ضرورتی استراتژیک است. اما پیادهسازی رباتهای متحرک در محیطهای واقعی مانند آزمایشگاههای پزشکی، مراکز تحقیقاتی، بیمارستانها یا کارخانههای داروسازی، تنها زمانی موفق خواهد بود که زیرساختی مطمئن و قابلاعتماد در پشت آن قرار داشته باشد.
MOLAR دقیقاً با این هدف طراحی شده است: ارائه یک معماری مرجع، مدولار و چندلایه که بتواند از سطح کنترل حرکتی تا سطح تصمیمگیری سازمانی را در یک چارچوب مهندسیشده، هماهنگ و مقاوم مدیریت کند.
در طول این تحلیل تخصصی، بهروشنی دیدیم که:
-
MOLAR فقط یک ابزار ناوبری نیست، بلکه یک پلتفرم کنترل تطبیقی، مقیاسپذیر و بلادرنگ برای مدیریت مأموریتهای پیچیده در محیطهای ناهمگون و چندسطحی است.
-
طراحی ماژولار و APIمحور آن، امکان استقرار در پروژههایی با تجهیزات متنوع، فرآیندهای چندبخشی، و نیازهای پویای سازمانی را بهسادگی فراهم میکند.
-
از نظر عملکرد میدانی، با نرخ موفقیت بالا، پاسخ بلادرنگ به اختلال، و رفتار پیشبینیپذیر، معماری MOLAR استانداردهای صنعتی را نهتنها رعایت، بلکه بازتعریف میکند.
-
و مهمتر از همه، قابلیت ادغام با سیستمهای اطلاعاتی مانند LIMS، HIS یا ERP، آن را به زیرساختی آماده برای ورود به عصر Industry 4.0 تبدیل کرده است.
فرصت همکاری برای سازمان شما: از مشاوره مهندسی تا استقرار کامل زیرساخت
اگر شما یک سازمان پیشرو در حوزه سلامت، داروسازی، لجستیک پیشرفته، یا فناوری رباتیک هستید و بهدنبال راهحلی واقعی برای اتوماسیون امن، قابلاعتماد و هوشمند در محیطهای انسانی–تعاملی میگردید، ما آمادهایم تا معماری MOLAR را متناسب با نیاز عملیاتی شما طراحی، پیادهسازی و توسعه دهیم. ما در کنار تیم شما میتوانیم:
-
زیرساخت کنترلی پروژههای ناوبری خودران را بر اساس MOLAR از صفر طراحی یا روی سامانههای موجود سوار کنیم
-
ماژولهای سامی (SAMI) و مدیر مأموریت (Task Manager) را متناسب با تجهیزات شما سفارشیسازی کنیم
-
ROS2، APIهای سازمانی، و استانداردهای صنعتی را در لایهای یکپارچه و مستند پیادهسازی کنیم
-
پروژه شما را از فاز شبیهسازی تا تست میدانی، اعتبارسنجی و بهرهبرداری کامل همراهی کنیم
MOLAR میتواند قلب تپنده ناوبری رباتهای شما باشد — در هر مقیاس، در هر فضا، و با هر سطح از پیچیدگی.



{kind=link}
بدون نظر