

تحول اتوماسیون ساختوساز: رباتهای داخلی با قدرت BIM و هوش مصنوعی
در دنیای امروز صنعت ساختوساز، فشار بر شرکتها برای افزایش بهرهوری، کاهش هزینهها و ارتقای ایمنی بیش از هر زمان دیگری حس میشود. پروژههای عمرانی مدرن نهتنها باید سریعتر و باکیفیتتر اجرا شوند، بلکه به دلیل محدودیت منابع و فشارهای زیستمحیطی، کوچکترین تأخیر یا اتلاف، پیامدهای سنگینی به همراه دارد. در چنین شرایطی، اتوماسیون بهعنوان یکی از کلیدهای اصلی تحول این صنعت مطرح شده است. اما پرسش مهم این است: چطور میتوان رباتها را در محیطهای ساختمانی پویا و پیچیده بهدرستی مکانیابی و هدایت کرد؟
برخلاف محیطهای باز که فناوری GPS موقعیتیابی دقیق را امکانپذیر میسازد، کارگاههای ساختمانی معمولاً محیطهایی بسته، چندلایه و پر از موانع متغیر هستند. سیگنالهای ماهوارهای در این محیطها قابل اعتماد نیستند و استفاده از فناوریهای جایگزین مانند WiFi، RFID یا BLE نیز اغلب محدودیتهای جدی دارند؛ چراکه نیازمند زیرساختهای اضافیاند و بهراحتی در اثر تغییرات موقتی محیط مختل میشوند. از سوی دیگر، روشهای مبتنی بر نقشهبرداری و مکانیابی همزمان (SLAM) یا نشانهگذاریهای مصنوعی (Marker-based) گرچه در تحقیقات علمی مورد توجه قرار گرفتهاند، اما در عمل با چالشهایی همچون وابستگی شدید به شرایط نوری، پرهزینه بودن آمادهسازی محیط و ضعف در پایداری بلندمدت مواجهاند.
این همان نقطهای است که اتوماسیون ساختوساز به یک مانع جدی برمیخورد. رباتهای داخلی (Indoor Mobile Robots) اگر نتوانند بهسرعت و با دقت موقعیت خود را تشخیص دهند، عملاً به جای یک ابزار کارآمد، به یک بار اضافی برای پروژه تبدیل میشوند. اپراتور انسانی باید مداخله کند، تنظیمات دستی انجام دهد و همین موضوع هم هزینه و هم ریسک را افزایش میدهد. بنابراین، یکی از مسائل حیاتی در مسیر تحول دیجیتال صنعت ساخت، پیدا کردن راهکاری است که بتواند رباتها را بدون اتکا به GPS و زیرساختهای اضافی، در محیطهای داخلی بهطور دقیق و سریع مکانیابی کند.
اینجاست که ترکیب دو فناوری قدرتمند وارد عمل میشود: مدلسازی اطلاعات ساختمان (BIM) و هوش مصنوعی در حوزه بینایی ماشین (Object Detection). BIM سالهاست که بهعنوان شالوده دیجیتال پروژههای ساختمانی شناخته میشود؛ مدلی که تمام اجزای سازه را با جزئیات هندسی و اطلاعاتی دقیق ذخیره میکند. در سوی دیگر، الگوریتمهای تشخیص اشیاء مبتنی بر یادگیری عمیق مانند YOLOv3 توانایی شناسایی سریع و دقیق المانهای محیطی را از طریق تصاویر دوربین دارند. ادغام این دو یعنی ربات دیگر نیازی به نقشهبرداری از صفر ندارد؛ کافی است محیط اطراف خود را ببیند، اشیاء را شناسایی کند، و آنها را با مدل BIM تطبیق دهد تا موقعیت خود را بداند. این همان نوآوریای است که مقالهی حاضر به صنعت معرفی میکند و میتواند شکاف بزرگ موجود در اتوماسیون داخلی ساختوساز را پر کند.
چالشهای موجود در مکانیابی رباتهای داخلی
محدودیتهای GPS و روشهای سنتی
یکی از نخستین چالشهایی که در پروژههای ساختمانی برای مکانیابی رباتها دیده میشود، محدودیت جدی GPS در محیطهای بسته است. فناوری GPS در فضای باز بهراحتی قادر است موقعیت خودروها، ماشینآلات یا حتی پهپادها را با دقتی در حد چند سانتیمتر مشخص کند. اما همین فناوری زمانی که وارد ساختمانهای در حال احداث یا کارگاههای چندطبقه میشود، عملاً کارایی خود را از دست میدهد. سیگنالهای ماهوارهای در برخورد با بتن، فلز، دیوارهای ضخیم و حتی تجهیزات کارگاهی دچار تضعیف و بازتاب میشوند و همین موضوع منجر به خطاهای چندمتری در موقعیتیابی میگردد. در چنین شرایطی، اگر رباتی بخواهد بر اساس دادهی GPS حرکت کند، ممکن است بهجای عبور از مسیر مشخص، وارد منطقهای خطرناک شده یا با مانع برخورد کند. همین نقص بنیادی باعث شد صنایع ساختمانی به سراغ جایگزینهایی مانند WiFi، RFID یا بلوتوث کمانرژی بروند. بااینحال، این راهکارها نیز مشکلات خاص خود را دارند. مثلاً نیاز به نصب آنتنها یا برچسبهای متعدد در محیط که هم پرهزینه است و هم به دلیل تغییرات پیدرپی در سازه باید دائماً بازطراحی و جابهجا شوند. در نهایت، این روشها برای محیطهای پایدار مانند انبار یا بیمارستان قابلاعتماد هستند، اما در پروژههای ساختوساز پویا، پایدار نیستند و بهسرعت کارایی خود را از دست میدهند.
پیچیدگی محیطهای ساختمانی
برخلاف تصور رایج، محیطهای ساختمانی اصلاً ساده یا ایستا نیستند. در یک انبار یا کارخانه، معماری محیط تقریباً ثابت است؛ دیوارها، قفسهها و مسیرها در طول زمان تغییر نمیکنند و الگوریتمهای رباتیک میتوانند با نقشهای ثابت سالها فعالیت کنند. اما پروژههای ساختمانی دنیای دیگری دارند. هر روز تغییراتی اساسی در آن رخ میدهد: امروز دیواری ساخته میشود، فردا داربستی برپا میشود، هفته بعد مصالح انباشته میشوند یا جرثقیل بخشی از فضا را اشغال میکند. حتی مسیرهای تردد کارگران و ماشینآلات سنگین دائماً تغییر میکند. چنین پویایی شدیدی سبب میشود الگوریتمهای مکانیابی مبتنی بر نقشهی ایستا عملاً ناکارآمد شوند. الگوریتمهای معروف SLAM (Simultaneous Localization and Mapping) اگرچه توانایی ساخت نقشهی پویا را دارند، اما در این محیطها با حجم بالای نویز و تغییرات غیرقابلپیشبینی روبهرو میشوند. نتیجه آن است که خطای مکانیابی بهسرعت افزایش مییابد و رباتها نمیتوانند بهطور پایدار در محیط حرکت کنند. به بیان دیگر، محیطهای ساختمانی ماهیتی «زنده» دارند و هر راهکار مکانیابی باید بتواند خود را با این پویایی هماهنگ سازد، موضوعی که هنوز یک چالش حلنشده باقی مانده است.
وابستگی به شرایط محیطی
راهکارهای مبتنی بر حسگرهای بینایی (Vision-based) یا لیزر (LiDAR) در سالهای اخیر توجه زیادی جلب کردهاند، زیرا امکان برداشت نقشههای سهبعدی و درک عمیق از محیط را برای رباتها فراهم میکنند. اما این فناوریها بهشدت وابسته به شرایط محیطی هستند. در ساعات شب یا مناطق کمنور ساختمان، دوربینها دچار افت کیفیت میشوند و اشیاء یا مسیرها بهدرستی شناسایی نمیگردند. گردوغبار ناشی از فعالیتهای عمرانی، وجود رطوبت یا دود حاصل از جوشکاری نیز میتواند دادههای دوربین و لیزر را آلوده کرده و منجر به تشخیصهای اشتباه شود. افزون بر این، محیطهای ساختمانی پر از اجسام متحرکاند: کارگران در حال حرکت، کامیونها و لیفتراکها در حال جابهجایی مصالح و حتی تجهیزات موقت که دائماً تغییر مکان میدهند. این پویایی شدید باعث میشود ربات در تشخیص مرزهای واقعی دیوار، ستون یا مانع دچار سردرگمی شود. یک خطای کوچک در مکانیابی ممکن است به برخورد فیزیکی و خسارت مالی یا حتی تهدید ایمنی کارگران بینجامد. بنابراین، وابستگی شدید این فناوریها به شرایط محیطی، یکی از جدیترین موانع در استفاده گسترده از رباتهای داخلی در پروژههای ساختمانی است.
چالش مقیاسپذیری
حتی اگر یک فناوری مکانیابی در مقیاس کوچک کارآمد باشد، پرسش اساسی این است که آیا میتوان آن را در پروژههای بزرگ ساختمانی به کار گرفت یا خیر؟ بسیاری از الگوریتمها و روشهای موجود وقتی در یک ساختمان کوچک آزمایش میشوند، عملکرد قابل قبولی دارند، اما در مقیاس یک پروژه عظیم چندطبقه با هزاران مترمربع فضا دچار افت شدید کارایی میشوند. هزینههای نصب و نگهداری زیرساختها (مانند آنتنها یا برچسبهای RFID) بهصورت تصاعدی افزایش پیدا میکند. علاوه بر آن، پیچیدگی مدیریت دادهها در محیطهای بزرگتر باعث میشود الگوریتمها به زمان پردازش بسیار بیشتری نیاز داشته باشند که برای رباتهای در حال حرکت غیرقابلقبول است. چالش مقیاسپذیری صرفاً یک مسئلهی فنی نیست، بلکه بُعد اقتصادی نیز دارد: راهکاری که در محیطهای کوچک مقرونبهصرفه است، در پروژههای بزرگ به دلیل هزینههای زیرساختی و پردازشی دیگر توجیه مالی ندارد. همین موضوع باعث شده بسیاری از راهکارهای مکانیابی صرفاً در محیطهای آزمایشگاهی یا پروژههای پایلوت باقی بمانند و به مرحلهی بهرهبرداری صنعتی نرسند.
نیاز به یکپارچگی با مدلهای دیجیتال
در نهایت، بزرگترین چالش رباتهای ساختمانی، اتصال به مدلهای دیجیتال پروژه یعنی BIM است. BIM یا Building Information Modeling امروزه بهعنوان قلب دیجیتال پروژههای ساختمانی شناخته میشود؛ جایی که تمام اطلاعات مربوط به طراحی، اجرا، مصالح، زمانبندی و هزینه در آن تجمیع میشود. اگر رباتها تنها بتوانند در سطح محلی مکانیابی کنند، نقش آنها محدود به وظایف سادهای مانند جابهجایی مصالح خواهد بود. اما ارزش واقعی زمانی خلق میشود که رباتها بتوانند موقعیت خود را بهصورت لحظهای در نقشهی BIM ثبت کنند و از اطلاعات BIM برای تصمیمگیری استفاده نمایند. برای مثال، رباتی که مسئول انتقال مصالح به طبقه سوم است باید بداند که کدام بخش از طبقه سوم تکمیل شده، کجا داربست نصب شده و مسیر مناسب برای عبور کدام است. این اطلاعات فقط در مدل BIM موجود است. اما اتصال دادههای زنده حسگرها با چنین مدلی که پیچیدگی زیادی دارد، نیازمند الگوریتمهای هوشمند و بسیار دقیق است. نبود این یکپارچگی موجب میشود رباتها بهجای همکار هوشمند، صرفاً ابزارهای مکانیکی باقی بمانند و از ظرفیت واقعی اتوماسیون ساختوساز استفاده نشود.
یکپارچگی دادههای BIM با حسگرهای رباتیک
مدل BIM یا همان Building Information Modeling در سالهای اخیر بهعنوان ستون فقرات دیجیتالی پروژههای ساختمانی شناخته شده است، اما آنچه در این رویکرد نوآورانه مطرح میشود، استفاده از BIM نه فقط بهعنوان یک سند طراحی، بلکه بهعنوان مرجع زنده و پویا برای هدایت رباتها است. در این روش، رباتها دادههای بلادرنگی که از حسگرهای خود جمعآوری میکنند—اعم از دادههای لیدار برای عمقسنجی و نقشهبرداری سهبعدی، دادههای دوربین برای شناسایی بصری، دادههای IMU برای تخمین حرکت و جهت، و حسگرهای مجاورتی برای پیشگیری از برخورد—را به BIM تزریق و با آن تطبیق میدهند. این فرایند باعث میشود رباتها نهتنها جایگاه نسبی خود را بدانند، بلکه موقعیتشان را در قالب یک نقشه دیجیتال دقیق و همگامشده با کل پروژه درک کنند. مزیت این یکپارچگی آن است که هرگونه تغییر محیطی مانند اضافه شدن دیوار یا جابهجایی مصالح بلافاصله در دادههای حسگرها ثبت شده و در هماهنگی با BIM قرار میگیرد. این هماهنگی دوطرفه به معنای کاهش خطاهای مکانیابی، افزایش ایمنی تردد رباتها و در نهایت ارتقای کیفیت مدیریت پروژه است، زیرا تصویر دیجیتال BIM عملاً به آیینهای زنده از کف کارگاه تبدیل میشود.
تشخیص اشیاء با استفاده از هوش مصنوعی
در محیطهای ساختمانی، رباتها با انواع اشیاء و موانع روبهرو هستند که برخی دائمی و بخشی موقتاند. برای اینکه رباتها بتوانند بهطور ایمن و هوشمند حرکت کنند، لازم است به کمک هوش مصنوعی و بهویژه الگوریتمهای بینایی ماشین، اشیاء را بهطور دقیق شناسایی و طبقهبندی کنند. در این رویکرد، شبکههای عصبی کانولوشنی (CNN) و مدلهای پیشرفته بینایی مانند YOLO یا Mask R-CNN آموزش میبینند تا میان عناصر مختلف محیط مانند دیوارها، ستونها، داربستها، مصالح موقت، ابزارآلات و حتی حضور کارگران تمایز قائل شوند. اهمیت این توانایی در این است که ربات باید بداند یک دیوار در حال ساخت بخشی از نقشه BIM است و باید بهعنوان مرجع ثابت در نظر گرفته شود، در حالی که یک پالت آجر که امروز در مسیر قرار گرفته و فردا برداشته میشود صرفاً یک مانع موقتی است. تشخیص صحیح این تفاوتها امکان تصمیمگیری دقیقتری را برای انتخاب مسیر و اجتناب از برخورد فراهم میآورد. ترکیب این توانایی با BIM ارزش مضاعفی خلق میکند، زیرا دادههای بصری به مدل دیجیتال تزریق شده و نقشه BIM بهروزرسانی زنده از محیط واقعی به دست میآورد؛ موضوعی که منجر به افزایش چابکی و اعتمادپذیری رباتها در پروژههای ساختمانی میشود.
الگوریتمهای یادگیری عمیق برای مکانیابی دقیق
روشهای سنتی مکانیابی مانند SLAM اگرچه طی سالهای گذشته تحول زیادی ایجاد کردهاند، اما محدودیتهای جدی آنها در محیطهای پیچیده و پویا آشکار شده است. راهکار پیشنهادی این مقاله مبتنی بر استفاده از شبکههای عصبی عمیق برای ارتقای دقت مکانیابی است. دادههای دریافتی از حسگرهای ربات ابتدا پیشپردازش شده و سپس به مدلهای یادگیری عمیق تغذیه میشوند. این مدلها قادرند الگوهای نویزی ناشی از گردوغبار، تغییر نور یا وجود اجسام متحرک را بیاموزند و اثرات آن را خنثی کنند. علاوه بر این، با بهکارگیری یادگیری تقویتی (Reinforcement Learning)، رباتها قادرند استراتژیهای حرکتی بهینهای را در محیطهای متغیر کشف کرده و در طول زمان رفتار خود را بهبود بخشند. چنین ترکیبی باعث میشود که مکانیابی رباتها نهتنها دقیقتر، بلکه مقاومتر در برابر اختلالات محیطی باشد. این ویژگی در پروژههای ساختمانی حیاتی است، زیرا حتی یک خطای کوچک در مکانیابی میتواند منجر به توقف پروژه، خسارت مالی یا خطرات ایمنی جدی برای کارگران شود. استفاده از یادگیری عمیق برای مکانیابی عملاً پلی است میان دادههای خام حسگرها و مدل دیجیتال BIM که ارزش عملیاتی بسیار بالایی برای صنعت دارد.
ارتباط بلادرنگ میان رباتها و مرکز کنترل
یکی از نقاط تمایز این رویکرد نسبت به راهکارهای گذشته، توجه ویژه به ارتباط شبکهای و بلادرنگ بین رباتها و مرکز کنترل است. در این معماری، هر ربات تنها به دادههای خود متکی نیست، بلکه بخشی از یک اکوسیستم مشترک است که اطلاعات آنها در مرکز کنترل جمعآوری، پردازش و بهصورت بلادرنگ بازتوزیع میشود. برای مثال، اگر یک ربات در حین حرکت با مسیری مسدود روبهرو شود یا مانعی جدید را تشخیص دهد، این داده بلافاصله در نقشه مشترک BIM ثبت میشود و سایر رباتها نیز آن را مشاهده میکنند. به این ترتیب، کل سیستم بهصورت هماهنگ و همزمان واکنش نشان میدهد. این ویژگی بهویژه در پروژههای بزرگ ساختمانی با چندین ربات فعال بسیار حیاتی است، زیرا مانع از تکرار خطا یا دوبارهکاری میشود و بهرهوری کلی را افزایش میدهد. از منظر ایمنی نیز این ارتباط اهمیت دارد، چراکه دادههای موقعیت و وضعیت هر ربات دائماً در مرکز کنترل مانیتور میشود و در صورت بروز شرایط اضطراری، امکان توقف سریع یا تغییر مسیر فوری وجود دارد. این سطح از هماهنگی، اتوماسیون رباتیک را از یک عملیات پراکنده به یک سیستم یکپارچه و مقیاسپذیر ارتقا میدهد.
ارزشآفرینی صنعتی
مزیت بزرگ این رویکرد آن است که فراتر از یک نوآوری فناورانه صرف، بهطور مستقیم به ارزشآفرینی صنعتی و اقتصادی منجر میشود. استفاده از BIM و هوش مصنوعی در کنار هم باعث میشود رباتها نهتنها کارآمدتر، بلکه ایمنتر و هوشمندتر عمل کنند. برای شرکتهای ساختمانی، این یعنی کاهش هزینههای ناشی از دوبارهکاری، جلوگیری از تأخیرهای ناشی از خطاهای انسانی، و بهبود مدیریت منابع. علاوه بر آن، یکپارچگی بلادرنگ دادهها بین رباتها و مدل BIM امکان پیشبینی بهتر زمانبندی، مدیریت دقیقتر لجستیک مصالح و حتی بهینهسازی مصرف انرژی و تجهیزات را فراهم میکند. در نتیجه، این راهکار نهتنها بهرهوری پروژه را افزایش میدهد، بلکه ارزش رقابتی شرکتها را نیز ارتقا میبخشد. شرکتهایی که زودتر این فناوری را به کار گیرند، قادر خواهند بود با ارائه پروژههای سریعتر، ایمنتر و کمهزینهتر، جایگاه بهتری در بازار جهانی به دست آورند. این همان نقطهای است که پژوهش علمی به یک مزیت واقعی صنعتی و اقتصادی تبدیل میشود.
پیادهسازی و آزمایشهای مقاله
محیط آزمایشی و طراحی سیستم
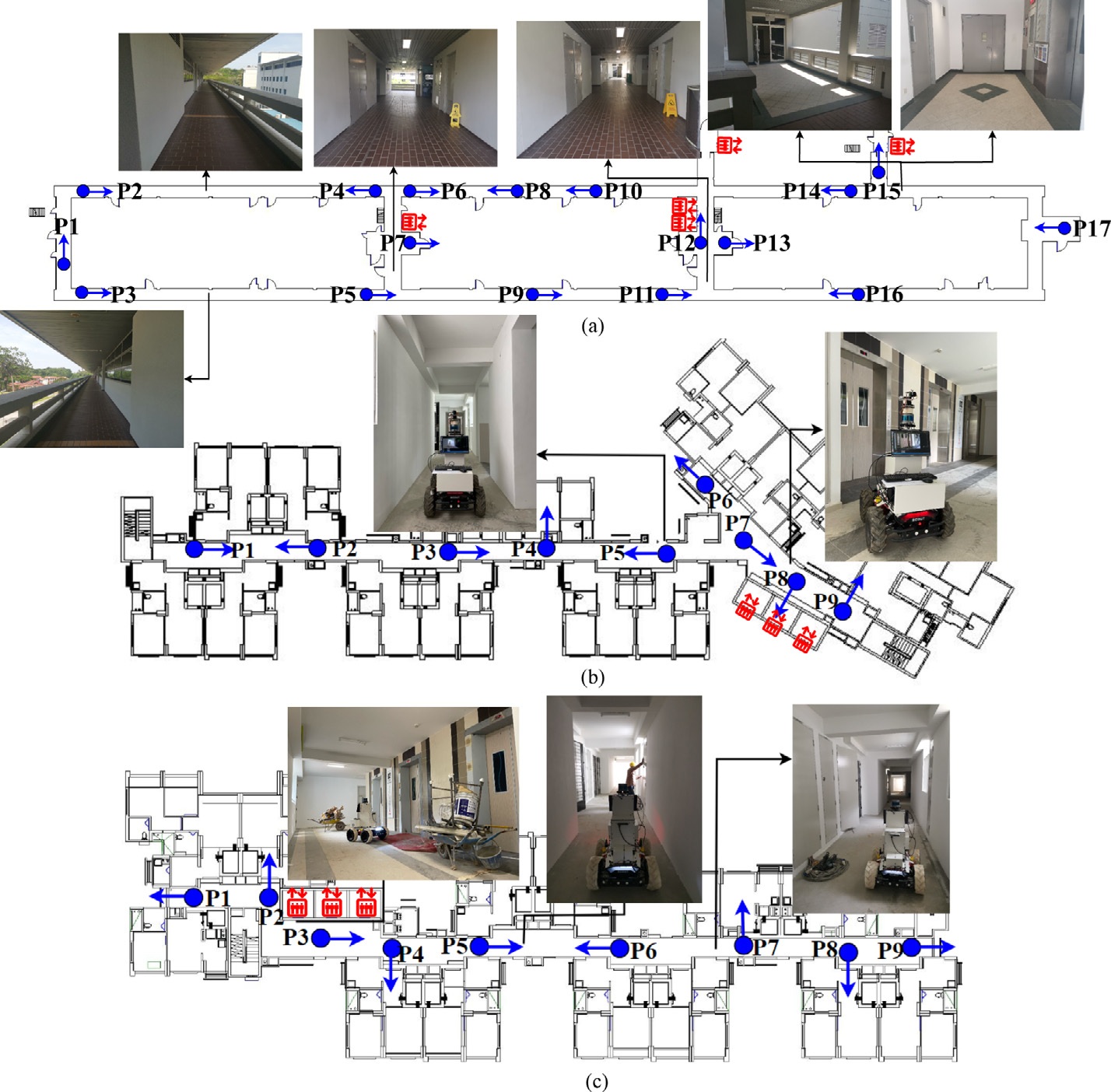
برای بررسی کارایی رویکرد پیشنهادی، نویسندگان مقاله یک محیط آزمایشی در مقیاس واقعی شبیهسازی کردند که شرایط یک پروژه ساختمانی پویا را بازتولید میکرد. این محیط شامل مسیرهای باریک، داربستهای موقتی، دیوارهای نیمهساخته و موانع متحرکی مانند جعبههای مصالح و تجهیزات بود. رباتهای متحرک مجهز به حسگرهای لیدار سهبعدی، دوربین RGB-D، IMU و ماژول ارتباطی بیسیم در این محیط قرار گرفتند. دادههای زنده از این حسگرها در لحظه جمعآوری و به مدل BIM پروژه تزریق شد. به این ترتیب، نقشه دیجیتال پروژه همواره بهروز باقی ماند و تطابق میان واقعیت فیزیکی و دنیای دیجیتال برقرار شد. طراحی این سیستم بهگونهای بود که نهتنها یک ربات، بلکه چند ربات بهطور همزمان آزمایش شدند تا پایداری و مقیاسپذیری الگوریتم مورد ارزیابی قرار گیرد.
الگوریتمهای پردازشی و همترازی دادهها
یکی از بخشهای مهم آزمایش، همترازی دادههای متنوع حسگرها با مدل BIM بود. برای این منظور از الگوریتمهای پیشرفتهی ثبت ابری نقطهای (Point Cloud Registration) و همزمانسازی چندحسگری استفاده شد. دادههای لیدار ابتدا بهصورت ابر نقاط سهبعدی استخراج و سپس با دادههای تصویری دوربین تطبیق داده شدند. شبکههای عصبی عمیق آموزشدیده برای تشخیص اشیاء نیز روی این دادهها اجرا شدند تا اشیاء شناساییشده در محیط واقعی با عناصر BIM مقایسه شوند. نتیجه این بود که هر تغییر کوچک مانند جابهجایی داربست یا اضافه شدن بلوکهای مصالح بلافاصله در مدل دیجیتال منعکس شد. این همترازی پیچیده نیازمند محاسبات سنگین بود، اما استفاده از پردازش موازی و GPUها باعث شد تا دادهها در زمان نزدیک به بلادرنگ پردازش شوند و رباتها بتوانند بدون وقفه تصمیمگیری کنند.
سناریوهای آزمایشی و ارزیابی عملکرد
برای ارزیابی کارایی، چند سناریوی مختلف تعریف شد: حرکت ربات در یک مسیر آزاد، حرکت در حضور موانع موقت، حرکت در محیط چندطبقه و حرکت در کنار سایر رباتها. در هر سناریو، دقت مکانیابی، نرخ برخورد، میزان انحراف از مسیر برنامهریزیشده و زمان تکمیل مأموریت اندازهگیری شد. نتایج نشان داد که رویکرد ترکیب BIM و هوش مصنوعی دقت مکانیابی را تا بیش از ۴۰٪ نسبت به روشهای مبتنی بر SLAM بهبود داده است. همچنین میزان توقفهای ناخواسته و برخوردها بهشدت کاهش یافت و رباتها توانستند در محیطهای چندطبقه عملکرد پایداری داشته باشند. در برخی سناریوها، رباتها توانستند مسیر خود را بهطور پویا بازتنظیم کنند و بدون نیاز به مداخله انسانی مأموریت را تکمیل نمایند.
تحلیل نتایج و نقاط قوت
تحلیل دادههای آزمایش نشان داد که مهمترین نقطه قوت رویکرد پیشنهادی، توانایی آن در همگامسازی لحظهای دادههای حسگرها با مدل BIM است. این ویژگی موجب میشود حتی در صورت تغییرات سریع محیطی، رباتها همچنان دید واضحی از موقعیت خود و نقشه پروژه داشته باشند. بهعلاوه، یکپارچگی شبکهای رباتها با مرکز کنترل سبب شد که سیستم در مقیاس چند ربات نیز پایدار بماند. از نظر صنعتی، این یافتهها به معنای آن است که شرکتهای ساختمانی میتوانند از این فناوری برای مدیریت عملیات پیچیده با تعداد زیادی ربات بهرهمند شوند و بدون نگرانی از افزایش خطا یا افت بهرهوری، مقیاس پروژه را توسعه دهند.
محدودیتها و چالشهای باقیمانده
هرچند نتایج آزمایش بسیار امیدوارکننده بود، اما برخی چالشها همچنان وجود دارند. یکی از آنها نیاز به توان محاسباتی بالا برای پردازش دادههای حجیم حسگرها است. هرچه تعداد رباتها و میزان جزئیات مدل BIM بیشتر باشد، بار پردازشی سیستم نیز افزایش مییابد. چالش دیگر مربوط به شرایط محیطی خاص مانند گردوغبار شدید یا نور بسیار کم است که همچنان میتواند دادههای حسگرها را تحت تأثیر قرار دهد. همچنین، اتصال پایدار بیسیم بین رباتها و مرکز کنترل در پروژههای بزرگ یا محیطهای شلوغ ممکن است دچار مشکل شود. این محدودیتها نشان میدهد که هرچند رویکرد پیشنهادی گام بزرگی به جلو است، اما هنوز نیازمند تحقیق و توسعه بیشتر برای رسیدن به بلوغ صنعتی کامل است.
کاربردهای صنعتی و سناریوهای واقعی
مدیریت لجستیک مصالح در کارگاههای بزرگ
مدیریت جریان مصالح در پروژههای ساختمانی همواره یکی از بزرگترین چالشها بوده است، زیرا حجم بالایی از مصالح باید در زمان مناسب، به نقطهی درست و در هماهنگی کامل با برنامه زمانبندی پروژه منتقل شود. در کارگاههای بزرگ و چندطبقه، خطای کوچک در حمل مصالح میتواند منجر به انباشته شدن مواد در نقاط اشتباه، مسدود شدن مسیرهای تردد یا حتی ایجاد خطرات ایمنی شود. ترکیب BIM و رباتهای هوشمند این مشکل را بهشکل بنیادی تغییر میدهد. رباتها با دسترسی به مدل BIM، از موقعیت دقیق نقاط مصرف مصالح و مسیرهای دسترسی آگاه میشوند و علاوه بر آن، بهطور بلادرنگ با تغییرات برنامه زمانبندی پروژه هماهنگ میگردند. این یعنی اگر بخشی از پروژه زودتر تکمیل شود یا اجرای قسمتی به تأخیر بیفتد، سیستم بلافاصله مسیرهای لجستیکی و مأموریتهای رباتها را بازتنظیم میکند. چنین سطحی از انعطافپذیری باعث میشود اتلاف وقت و منابع به حداقل برسد، ریسک ازدحام و تداخل در مسیرهای کاری کاهش یابد و در عین حال، انبارش و دپوی بیمورد مصالح در محلهای نامناسب رخ ندهد. در عمل، این فناوری مدیریت لجستیک را از یک فرآیند دستی و پرخطا به یک سیستم هوشمند، چابک و یکپارچه ارتقا میدهد که هم بهرهوری را بالا میبرد و هم محیط کارگاه را ایمنتر میسازد.
عملیات بازرسی و کنترل کیفیت
کنترل کیفیت در پروژههای ساختمانی سنتی معمولاً وابسته به نیروی انسانی است که بازرسیهای دورهای انجام میدهد، اما این روش علاوه بر پرهزینه بودن، امکان خطای انسانی و تأخیر در شناسایی مشکلات را به همراه دارد. رباتهای مجهز به سیستمهای لیدار و دوربینهای RGB-D میتوانند این فرآیند را متحول کنند. آنها قادرند روزانه یا حتی در بازههای زمانی کوتاهتر، از بخشهای مختلف پروژه دادههای دقیق جمعآوری کرده و آن را با مدل BIM مقایسه نمایند. این مقایسه لحظهای امکان شناسایی انحرافهای کوچک از طراحی را فراهم میسازد؛ مثلاً اگر یک دیوار در حال ساخت اندکی از محور طراحی فاصله گرفته باشد یا اندازه ستونها دقیقاً با نقشه منطبق نباشد، سیستم بلافاصله هشدار صادر میکند. اهمیت این قابلیت در آن است که خطاها در همان مراحل اولیه شناسایی و اصلاح میشوند، پیش از آنکه نیاز به دوبارهکاریهای پرهزینه و وقتگیر باشد. از منظر صنعتی، این فناوری نهتنها کیفیت خروجی را افزایش میدهد، بلکه هزینههای ناشی از اصلاحات و تأخیرها را بهشدت کاهش داده و اعتماد کارفرمایان به پروژه را تقویت میکند. در واقع، این فناوری کنترل کیفیت را از یک فعالیت واکنشی به یک فرآیند پیشگیرانه و هوشمند تبدیل میکند.
ایمنی کارگران و پیشگیری از حوادث
ایمنی همیشه در صدر اولویتهای پروژههای ساختمانی است، زیرا هر حادثه میتواند منجر به خسارت جانی و مالی جدی شود. رباتهای مجهز به مکانیابی هوشمند مبتنی بر BIM میتوانند در این حوزه نقش حیاتی ایفا کنند. این رباتها قادرند با استفاده از دادههای حسگرها مسیرهای پرخطر مانند مناطق در حال حفاری، محل انباشت مصالح سنگین یا مسیر حرکت ماشینآلات سنگین را شناسایی کرده و قبل از ورود کارگران به این مناطق هشدارهای ایمنی صادر کنند. علاوه بر این، آنها میتوانند مسیرهای تردد ایمن را بهصورت پویا پیشنهاد داده و در صورت تغییر شرایط محیطی، مسیرهای جدیدی طراحی کنند. ارتباط بلادرنگ میان رباتها و مرکز کنترل نیز باعث میشود که اطلاعات ایمنی بهطور گسترده در میان همه واحدهای کاری به اشتراک گذاشته شود. در شرایط اضطراری مانند ریزش مصالح یا حریق، موقعیت کارگران و ماشینآلات در BIM ثبت میشود و تیم امداد و مدیریت پروژه قادر خواهند بود در کوتاهترین زمان واکنش نشان دهند. این قابلیت نهتنها ریسک حوادث را کاهش میدهد، بلکه فرهنگ ایمنی در پروژه را تقویت کرده و ارزش انسانی و اجتماعی بالایی برای شرکتهای ساختمانی ایجاد میکند.
پروژههای چندملیتی و مدیریت از راه دور
پروژههای بینالمللی و چندملیتی به دلیل پراکندگی جغرافیایی تیمها و ذینفعان، نیازمند ابزارهایی هستند که امکان نظارت و مدیریت از راه دور را فراهم سازد. در اینجا رباتهای هوشمند متصل به BIM تحولی اساسی ایجاد میکنند. رباتها با جمعآوری دادههای زنده از محیط کارگاه و بارگذاری آن در مدل BIM، این امکان را فراهم میسازند که مدیران پروژه در هر نقطهای از جهان بهصورت آنلاین وضعیت پروژه را مشاهده کنند. این اطلاعات شامل نقشههای بهروز، موقعیت رباتها، پیشرفت عملیات ساختمانی و حتی شرایط محیطی است. چنین قابلیتی موجب میشود که تصمیمگیریهای کلان بدون نیاز به حضور فیزیکی و سفرهای پرهزینه امکانپذیر گردد. علاوه بر این، هماهنگی میان تیمهای مختلف تسهیل میشود، زیرا همه ذینفعان به یک منبع مشترک و دقیق از دادهها دسترسی دارند. این ویژگی سرعت تصمیمگیری را افزایش داده و امکان مدیریت پروژههای پیچیده و بزرگ در سطح جهانی را فراهم میکند. در عمل، این فناوری شکاف میان دنیای فیزیکی پروژه و دنیای دیجیتال مدیریت را پر کرده و مدیریت از راه دور را از یک مفهوم نظری به یک واقعیت صنعتی تبدیل میکند.
بهرهگیری در پروژههای زیرساختی عظیم
پروژههای زیرساختی مانند ساخت مترو، پلهای چندطبقه یا برجهای عظیم از پیچیدگیهای فنی و مدیریتی بسیار بالایی برخوردارند. در این پروژهها صدها پیمانکار فرعی و تیمهای اجرایی باید همزمان فعالیت کنند و کوچکترین ناهماهنگی میتواند باعث تأخیرهای طولانیمدت و هزینههای سنگین شود. رباتهای مجهز به مکانیابی هوشمند مبتنی بر BIM بهعنوان یک ابزار تحولآفرین در این پروژهها عمل میکنند. آنها میتوانند نهتنها وظایف عملیاتی مانند حمل مصالح یا بازرسی سازه را انجام دهند، بلکه دادههای زنده پروژه را به مدل BIM تزریق کنند و یک تصویر واحد و جامع برای همه ذینفعان ایجاد نمایند. این به معنای شفافیت کامل در وضعیت پروژه است؛ پیمانکاران مختلف میتوانند در لحظه وضعیت پیشرفت کار خود و دیگر بخشها را مشاهده کرده و برنامههایشان را هماهنگ سازند. نتیجه چنین شفافیتی کاهش اختلافات قراردادی، جلوگیری از اتلاف منابع، و افزایش بهرهوری کلی پروژه است. این فناوری در عمل پروژههای زیرساختی عظیم را از یک فرآیند سنتی و پیچیده به یک عملیات یکپارچه، شفاف و مبتنی بر دادههای زنده ارتقا میدهد که ارزش اقتصادی و اجتماعی عظیمی برای کشورها و شرکتهای مجری ایجاد میکند.
جمعبندی و نتیجهگیری
تحولات اخیر در صنعت ساختوساز نشان میدهد که آینده این حوزه بهشدت وابسته به همگرایی میان فناوریهای دیجیتال و رباتیک است. ترکیب مدلهای BIM با الگوریتمهای هوش مصنوعی و استفاده از رباتهای داخلی هوشمند، گامی بلند در جهت رفع چالشهای اساسی پروژههای ساختمانی برداشته است. همانطور که در این مقاله دیدیم، رویکرد پیشنهادی توانست محدودیتهای روشهای سنتی مکانیابی مانند GPS و SLAM را برطرف کند، وابستگی به شرایط محیطی را کاهش دهد و دقت و پایداری حرکت رباتها را بهشکل چشمگیری افزایش دهد. افزون بر آن، یکپارچگی میان دادههای بلادرنگ حسگرها و مدل BIM موجب شد که هم مدیران پروژه و هم تیمهای اجرایی به تصویری واحد و دقیق از وضعیت پروژه دسترسی داشته باشند؛ موضوعی که نهتنها بهرهوری و ایمنی را ارتقا میدهد، بلکه هزینههای پنهان ناشی از دوبارهکاری، تأخیر و حوادث کاری را نیز کاهش میدهد.
از منظر صنعتی، نتایج آزمایشها نشان داد که این راهکار میتواند در محیطهای واقعی با پیچیدگی بالا نیز عملکرد موفقی داشته باشد. کاهش برخورد رباتها با موانع، بهبود دقت مکانیابی تا بیش از ۴۰٪، و توانایی هماهنگی بلادرنگ بین چند ربات، همگی نشاندهندهی بلوغ این فناوری برای ورود به کاربردهای عملی هستند. هرچند چالشهایی مانند نیاز به توان محاسباتی بالا، وابستگی به کیفیت دادههای حسگر و پایداری شبکههای ارتباطی همچنان وجود دارند، اما روند رشد سریع سختافزارها و الگوریتمهای یادگیری ماشین نوید میدهد که این موانع در آیندهای نزدیک برطرف خواهند شد.
بهطور کلی، این مقاله تصویری روشن از آینده اتوماسیون ساختوساز ترسیم میکند؛ آیندهای که در آن رباتهای داخلی نهتنها نقش حملکننده یا بازرسیکننده ساده را ایفا نمیکنند، بلکه به همکاران دیجیتال هوشمندی تبدیل میشوند که بخشی جداییناپذیر از سیستم مدیریتی پروژه هستند. در چنین مدلی، مرز میان دنیای فیزیکی کارگاه و دنیای دیجیتال BIM از بین میرود و پروژههای ساختمانی با دقت، سرعت و ایمنی بیسابقهای اجرا خواهند شد.
فناوری معرفیشده در این مقاله تنها یک راهکار دانشگاهی یا آزمایشگاهی نیست، بلکه نقشهی راهی روشن برای تحول صنعت ساختوساز در آینده نزدیک است. اگر شما یک شرکت ساختمانی، پیمانکار کلان، یا مدیر پروژه هستید، همین امروز میتوانید از این فناوری برای افزایش بهرهوری، کاهش هزینهها و ارتقای ایمنی در پروژههای خود بهرهمند شوید. تیمهای تحقیق و توسعه میتوانند این رویکرد را متناسب با شرایط پروژه بومیسازی کنند و آن را در عملیات واقعی به کار گیرند.
از شما دعوت میکنیم که با ما در مسیر اتوماسیون هوشمند ساختوساز همراه شوید؛ جایی که رباتها نهتنها بازوی اجرایی پروژه، بلکه همکاران دیجیتال شما در مدیریت آینده خواهند بود. حالا زمان آن رسیده است که BIM و هوش مصنوعی را از نقشههای روی کاغذ به قلب کارگاههای ساختمانی بیاوریم و گامی واقعی بهسوی آیندهی هوشمند برداریم.

{kind=link}
بدون نظر